
Abstract
In the previous studies, admittance control and impedance control for a finger-arm robot using the manipulability of the finger were studied and methods of realizing the controls have been proposed. In this study, two 3-DOF fingers are attached to the end-effector of a 6-DOF arm to configure a multi-finger arm robot. Based on the previous methods, the authors have proposed an admittance control for a multi-finger arm robot using the manipulability of the fingers in this study. Algorithms of the averaging method and the mini-max method were introduced to establish a manipulability criterion of the two fingers in order to generate a cooperative movement of the arm. Comparison of the admittance controls combined with the top search method and local optimization method for the multi-finger arm robot was made and features of the control methods were also discussed. The stiffness control and damping control were experimentally evaluated to demonstrate the effectiveness of the proposed methods.
Introduction
Humanoid robots with two upper limbs have been extensively studied in recent years. The upper limb of such robots is generally composed of a multi-finger-arm having a complex mechanical structure. Such a structure possesses a high degree of freedom (DOF) that permits considerable flexibility for the humanoid robot to perform various dexterous manipulations in a manner similar to the human upper limb. However, the movement of a multi-finger arm with such high redundancies creates the problem of how to determine the numerous joints.
Controlling a robot that has a high degree of redundancy is a fundamental problem in the field of robotics. A considerable number of studies have reported on methodology for determining the redundant degree of freedoms of a multi-joint manipulator. The issues that have been studied thus far include the avoidance control of a kinematics singularity [1],[2] and obstacle collisions avoidance [3]–[5] by using the redundant degree of freedoms of the manipulator.
To realize the dexterous manipulation comparable to that of the human hand-arm, a lightweight finger was attached at the end of a serial-linkage manipulator so as to greatly improve the performance of a robot [6]–[12]. It is well known that manipulability have been widely used in robotics to evaluate mobility of a manipulator. Kinematic manipulability ellipsoid problem to general cooperating arms has been reported [13]–[15]. Force manipulability for multiple-arms [16]–[19], kinematic manipulability of closed chains [18],[20],[21] have also been addressed.
Actually, when performing delicate tasks, humans usually adopt a motion policy of keeping their upper limb in a formation which enables them to easily move their hand. To generate an efficient motion for a finger-arm robot that emulates the movement of the human hand-arm in an unconstrained space, the authors proposed a heuristic method [22][23] and a steepest ascent method [24][25] that make use of the manipulability of the finger. Integration of the impedance control and manipulability regulation of the finger was also attempted for a finger-arm robot to complete a contact task [26] [27].
Based on the previous concept of using finger's manipulability as a criterion, in this study, we have proposed a method of applying the admittance control to a multi-finger arm robot for completing a constrained task. However, unlike the case of using one finger, two fingers are used in this study and algorithms that can manipulate a multi-fingered arm are required. In this study, we first introduced a mini-max method and the averaging method for two fingers to establish a manipulability criterion for cooperatively moving the arm. Then, algorithms of admittance control combined with the top search method (TSM) and the local optimization method (TOM) are configured to regulate the manipulability of the fingers. Experiments of the stiffness control and damping control were completed to demonstrate the effectiveness of the proposed algorithms.
Overview of a Multi-Finger Arm Robot
Configuration of the Multi-finger Arm Robot
A 7-DOF manipulator (PA-10, Mitsubishi Heavy Industry Co.) was used in this study. Since the S3 axis of PA-10 was not used, the manipulator had 6 DOFs. The sevodriver of PA-10 was connected to a personal computer by arc network. Two 3-DOF finger robots (Yasukawa Co.) were attached to the end-effector of the arm to obtain a multi-finger arm robot with 12 DOFs. As shown in Fig. 1, two fingers were placed in parallel to emulate the forefinger and middle finger of a human being. To detect the contact force in a constrained task, two 3-axes F/T sensors (BL AutoTech Co.) were fixed at each fingertip, respectively. Data of the F/T sensors is input through an A/D board (AD12-64(PCI), Contec Co.) inserted in the computer. The control sampling time interval denoted as T(=5ms) was determined from an interrupt signal generated by an external timer on the A/D board.

Schematic diagram of the multi-finger arm robot
As shown in Fig. 1, the base coordinate of the arm and the end-effector coordinate of the arm are denoted by ∑ b and ∑ t , respectively. In this study, a contact task using the multi-finger arm is assumed. It is known that the fingers easily drop to their singularities during movement in a large space because of their small link sizes. Therefore, to avoid the singularity of the fingers, a cooperative movement of the arm is required to augment the working space of the fingers so as to simultaneously regulate the manipulability of the two fingers.
The position in Σ
b
and ∑
t
of the i
th
fingertip is

where

where θi1, θi2 and θi3 are the joint angles of the i th finger and l1, l2 and l3 the link sizes of the fingers. The relation between the w i and the joint angles θ i is graphically shown in Fig. 2.

A 3D graph of the manipulability of the finger
Before introducing the proposed control method in this study, we briefly describe the algorithms proposed in the previous studies.
Top Search Method (TSM)
To prevent the manipulability of the finger from continuously decreasing, a cooperative movement of the arm was generated by the top search method (TSM) [22] [23]. When the finger manipulability w is smaller than a given threshold w
th
, the quantity of the expected movement of the arm end-effector Δ

The scalar quantity A(w) in (3) is determined as

where K a is an heuristically determined coefficient. n(k) ∊ R3×1 is a unit direction vector of the desired trajectory and it was given by

where
The disadvantage of the TSM is that it cannot directly increase manipulability w of the finger. Therefore, to effectively regulate w, the local optimization method (TOM) was proposed [24][25]. The most important feature of the TOM is that manipulability w can be increased rapidly once it is smaller than a given reference w
th
. In the previous study, whenever w decreases to a value below w
th
, LOM is applied. The desired joint angle
where Λ is a predetermined gain coefficient and

where

where Λ f represents the kinematics of the finger.
The impedance to be achieved at the fingertip in ∑ b can be expressed as

where Δ
Unlike the case of previous studies, two fingers are used in this study. The arrangement of the two fingers to emulate the forefinger and the middle finger of a human being allows a nearly simultaneous increase or decrease in the manipulability of the two fingers. Therefore, we consider the lesser manipulability among the two as the criterion for generating a cooperative movement of the arm. The mini-max method is introduced to select the smaller manipulability from the two w i (i=1, 2); it can be expressed by

In this study, w l is used as the criterion to determine the movement of the arm.
In a manner similar to the description in section 3.1, when the manipulability w
l
is smaller than the given threshold w
th
, the desired position of the arm end-effector

A(w) in (12) is determined as

where K a is an heuristically determined coefficient. n(k) ∊ R3×1 in (12) is a unit direction vector of the desired trajectory and it is computed by

where l is the number of fingers having lesser manipulability;
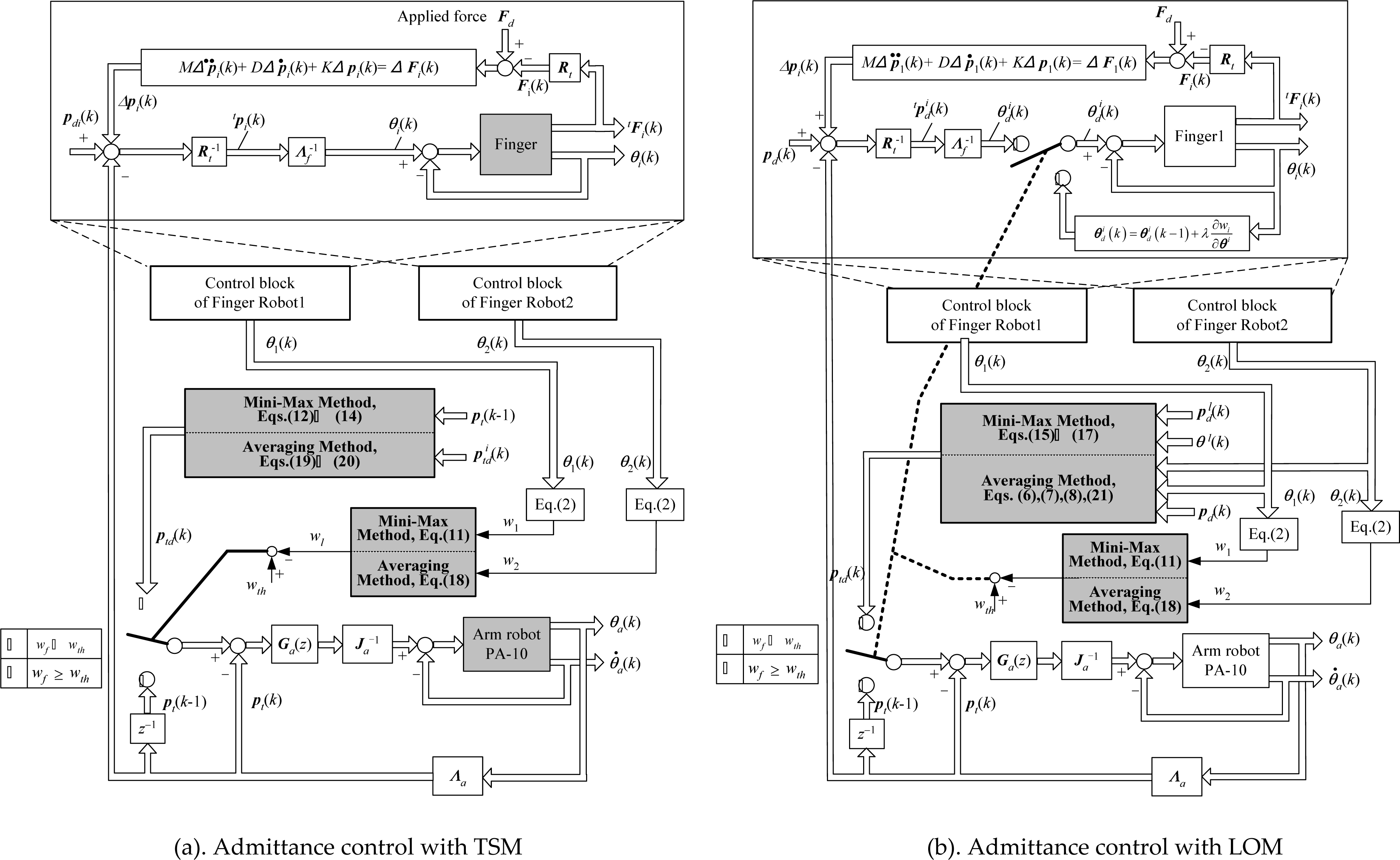
A combination of admittance control with the TSM is proposed and the control block diagram is shown in Fig. 3(a), where the Λ
f
and Λ
a
are kinematics of the finger and the arm, respectively,
t
Schematic diagram of the multi-finger arm robot
When the manipulability w
l
is lesser than a given threshold w
th
, the desired joint angle

Equation (7) is then applied to (15) to obtain

where

The proposed admittance control combined with the TOM is shown in Fig. 3(b).
As described above, the mini-max method determines the finger having the lesser manipulability. However, switching control between the two fingers lead to an unexpected, rapid change in velocity of the arm. To avoid this problem, an averaging method is also introduced in this study; this method obtains the average of the manipulability of the two fingers. The averaged manipulability wave is given by

When the manipulability is lesser than a given threshold w
th
, the quantity of the expected movement of the arm end-effector Δ

where

where
When the manipulability is lesser than a given threshold w
th
, (6), (7), and (8) are applied to each finger. The desired position

where the fingertip position
t

The proposed admittance control combined with the LOM is shown in Fig. 3(b).
Experiments were conducted to evaluate the stiffness control and damping control using the proposed control diagram shown in Fig. 3. In these experiments, the operator pushed and pulled the fingertips to apply an external force along the y axis of ∑ b at the fingers, as shown in Fig. 4.

Experiment using the multi-finger arm
The impedance parameters in (10) were empirically determined:
M = 1.0 kg, D = 30.0 Ns/m, K = 150.0 N/m. Threshold manipulability w
th
= 2.0 × 10−4.
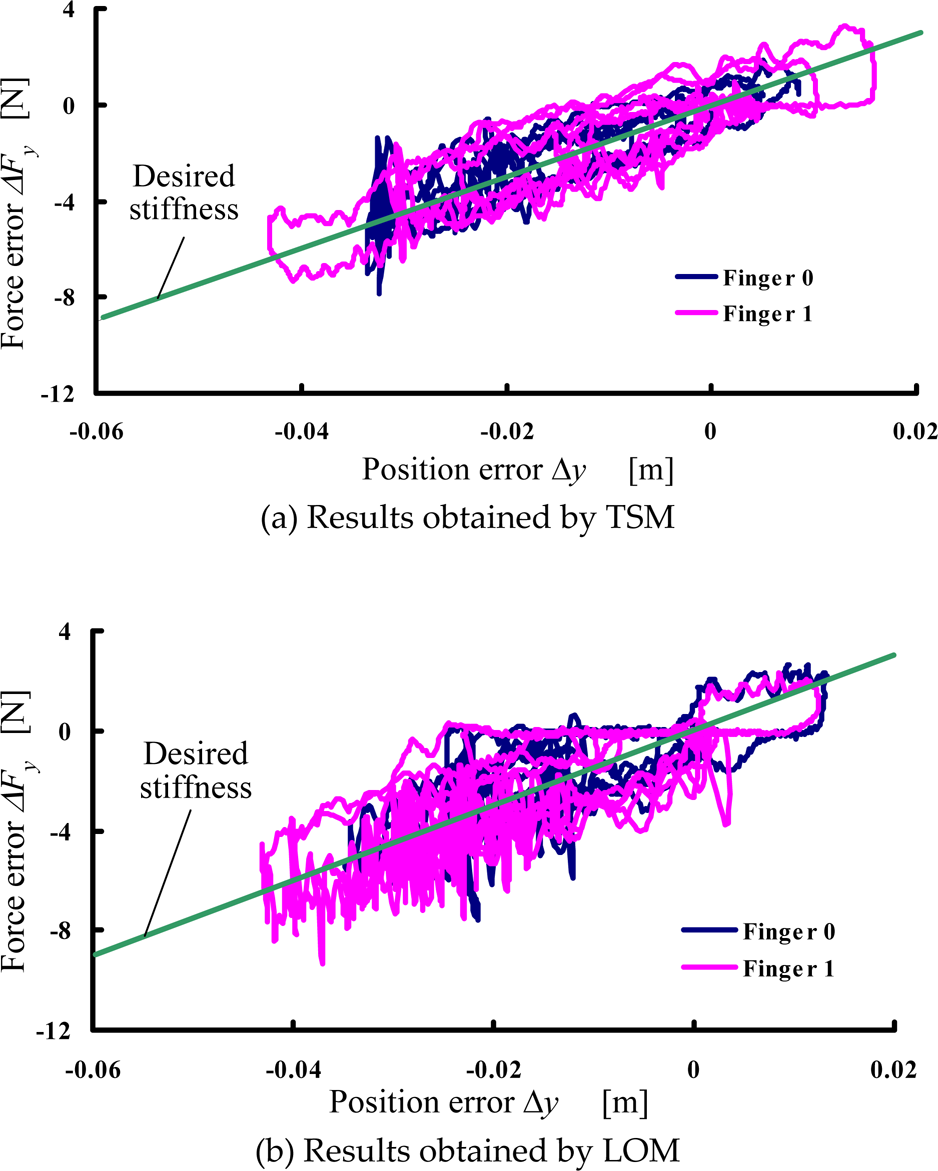
The stiffness results obtained using TSM and LOM are shown in Fig. 5; the position results of the arm end-effector using TSM and LOM are shown in Fig. 6;
Stiffness results using the min-max method
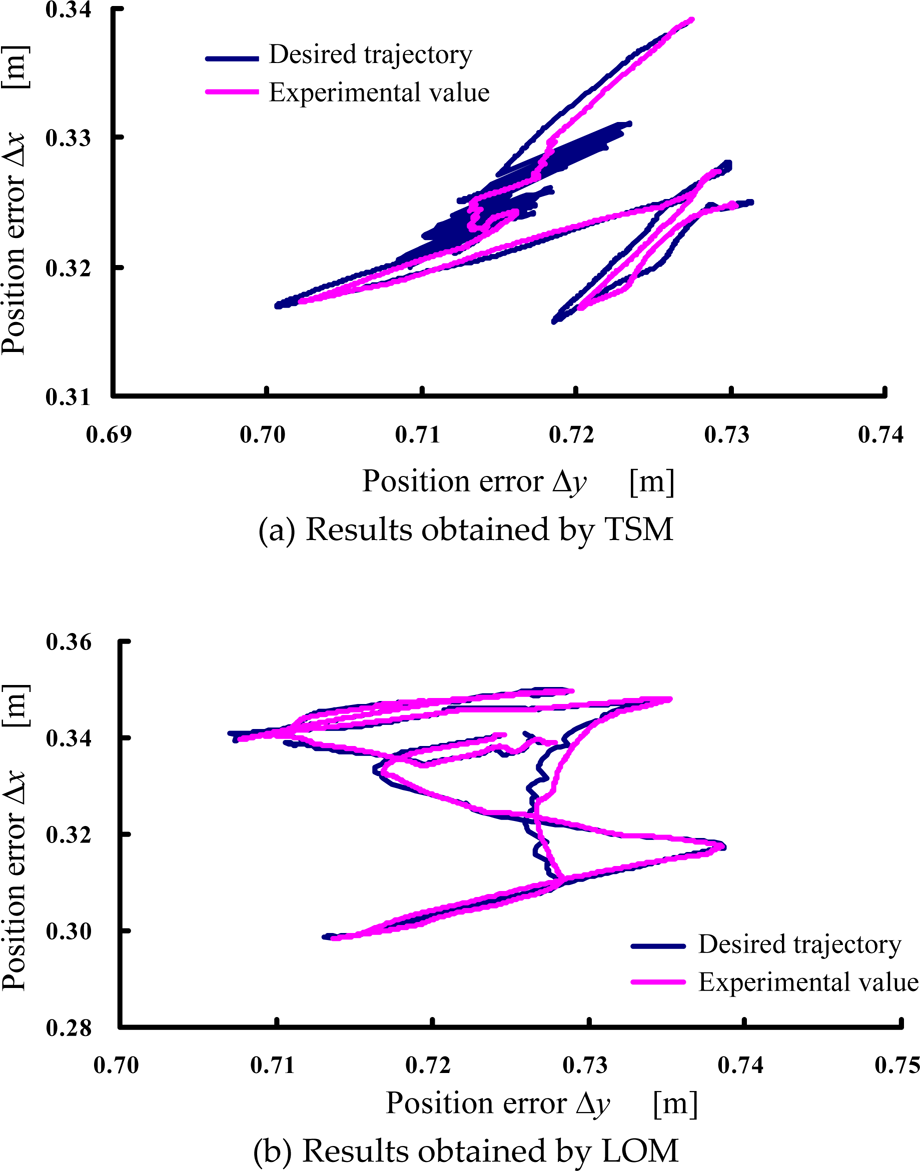
Position of the arm's end-effector using the min-max method in stiffness control
The stiffness effects using both the TSM and LOM are modestly completed as shown in Fig. 5; therefore, the effectiveness of the mini-max method is confirmed. However, small tracking errors are detected in the position results of the arm end-effector, as shown in Fig. 6. This is attributed to the rapid change in velocity of the arm movement that is induced by the control of the arm being switched between the two fingers by the mini-max method.
The manipulability results using TSM and LOM are shown in Fig. 7. Although the results indicate that the LOM provided better stiffness control than the TSM, the manipulability results of the two fingers were effectively modulated around the w th by both the TSM and the LOM. However, unlike the case of using one finger in the previous studies [24][25], w of two fingers using LOM cannot be completely regulated above w th .

Manipulability results using the min-max method
The impedance parameters in (10) were empirically determined:
M = 1.0 kg, D = 100.0 Ns/m, K = 0.0 N/m.
Threshold manipulability w th = 2.0 × 10−4,
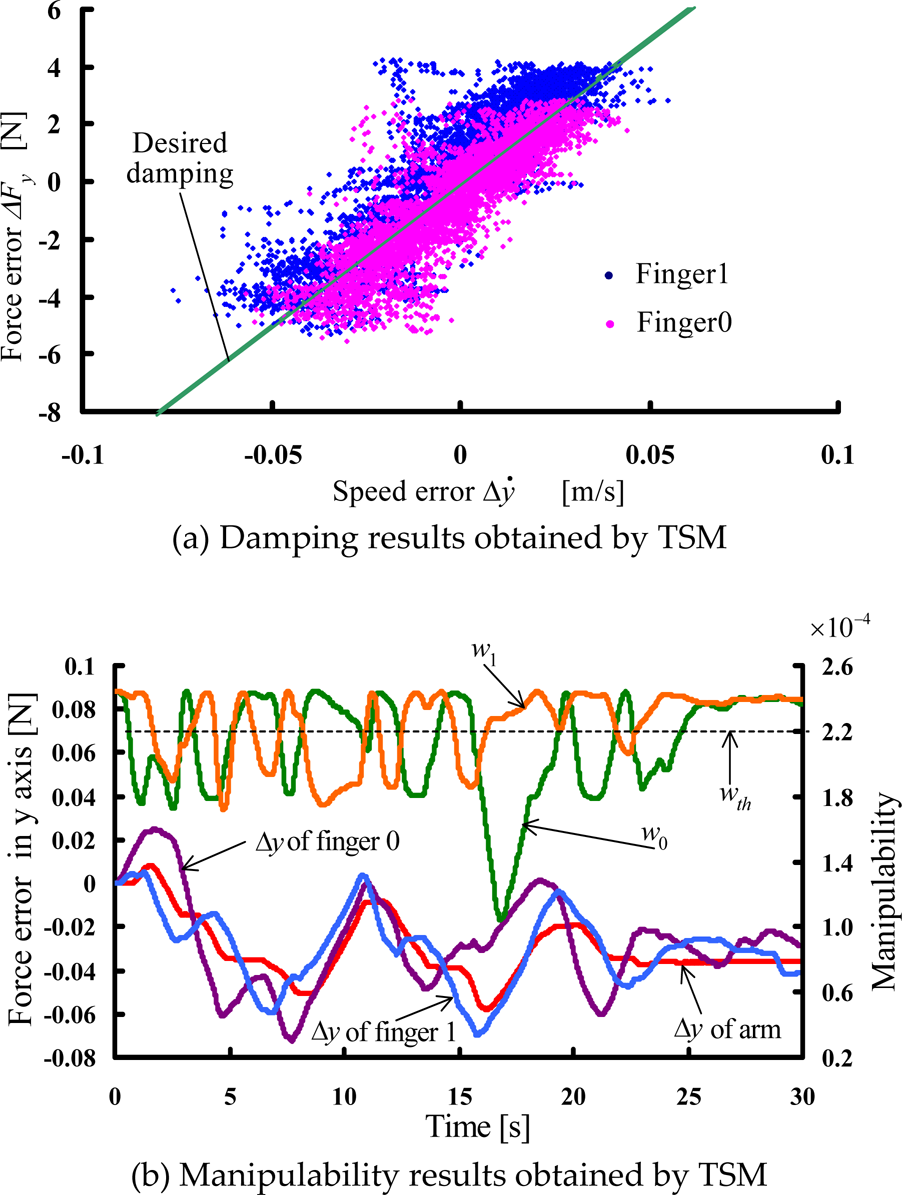
Damping control using the TSM and LOM was evaluated experimentally and the results are shown in Fig. 8. The results indicated that the TSM provides better damping than the LOM. This phenomenon was not observed in the previous study in which only one finger was used. The influence of switching control between the two fingers in the mini-max method can be considered to be the main reason for the same.

Damping results using the min-max method
Moreover, when the TSM was applied, the arm cooperatively moved along the direction in which the finger had maximum manipulability according to (12)∼(14). However, when the LOM was used based on (15)∼(17), the finger moved primarily to increase its manipulability and the arm moved for the remained distance from the desired position. This fact suggests that the arm moves more roughly when using the LOM than when using the TSM.
Experiments were also conducted to evaluate the stiffness control and damping control using the averaging method shown in Fig. 3. Same as the experiments using the mini-max method, the operator also pushed and pulled the fingertips to apply an external force along the y axis of ∑ b at the fingers in these experiments. However, experiments using LOM were not completed because one of the two fingers demonstrated an unstable performance, which is discussed in next section.
Stiffness Control Using TSM
The impedance parameters in (10) were determined:
M = 1.0 kg, D = 30.0 Ns/m, K = 150.0 N/m. Threshold manipulability w
th
= 2.0 × 10−4.
The stiffness results and position results of the arm are shown in Figs. 9(a) and 9(b) respectively. As compared to the results obtained by the mini-max method, shown in Fig. 5, the stiffness results obtained by the averaging method are more accurately completed. This is because the cooperative movement of the arm using the averaging method is always determined by the average manipulability of the two fingers instead of switching control between the two fingers, as in the case of the mini-max method. Therefore, the averaging method provides stable movement for a multi-finger arm.

Experimental results (averaging method)
The manipulability results are shown in Fig. 10. As compared to the results shown in Fig. 7, it was found that manipulability occasionally decreased considerably. This fact indicates that it is difficult to simultaneously regulate the manipulability around the given threshold for the two fingers using the averaging method.

Manipulability for stiffness control (the averaging method)
The impedance parameters in (10) were given:
M = 1.0 kg, D = 100.0 Ns/m, K = 0.0 N/m. Threshold manipulability w
th
= 2.0 × 10−4,
The damping results are shown in Fig. 11. As compared to the results obtained by the mini-max method shown in Fig. 8, the damping effect is only completed for one of the two fingers using the averaging method, as shown in Fig. 11(a). From the manipulability results obtained by the averaging method, as shown in Fig. 11(b), the manipulability of one finger is modulated around the w th whereas that of the other finger decreases considerably. This is because in the mini-max method, the minimum manipulability is used as a criterion to generate a cooperative movement of the arm, whereas in the averaging method, the average manipulability of the two fingers is computed to generate a movement for the arm.

Results in damping control (w th = 2.0 × 10−4) (averaging method)
To improve the performance of admittance control, we increased the threshold w th (=2.2×10−4) and reevaluated the damping control. The results are shown in Fig. 12(a). As compared to the results shown in Fig. 11, the damping effect is found to be remarkably improved. The regulation of the manipulability is also improved, as shown in Fig. 12(b). Increasing the threshold manipulability resulted in an active movement of the arm, and thus, the finger with lesser manipulability can be easily included.
Results for damping control (w th = 2.2 × 10−4) (averaging method)
The obtained experimental results indicate that for a multi-finger arm robot, the proposed admittance control with TSM exhibits a better admittance effect than that using the admittance control with LOM.
To deal with the problem of how to generate a cooperative motion for a multi-finger arm, the mini-max method and the averaging method were proposed in this study. The mini-max method considers the finger with lesser manipulability as a reference to generate a cooperative movement of the arm. This lead to the switching of control between the two fingers, and this in turn resulted in a rapid change in velocity of the arm. In contrast to the mini-max method, the averaging method considers the average manipulability of the two fingers as a reference to cooperatively move the arm. Therefore, the motion of the arm is completed smoothly, whereas the manipulability of the two fingers cannot be simultaneously regulated above the threshold manipulability. For this reason, the manipulability of one finger possibly decreased a lot in the experiments using LOM with the averaging method. As a result, the finger with lesser manipulability easily dropped in a state around its singularity, which leads an unstable performance and the experiments could not be completed.
Conclusion
In this study, admittance control combined with the TSM and the LOM have been proposed for a multi-finger arm robot. The mini-max method and the averaging method were introduced to deal with the manipulability of two fingers. The features of the proposed control algorithms have been investigated by experimentally evaluating the stiffness control and the damping control. The impedance experimental results demonstrate the effectiveness of the proposed methods. The results also indicate that when the averaging method combined with the TSM was applied, the arm moved smoothly and the admittance effect could be greatly improved by selecting a suitable threshold manipulability.
Footnotes
9.
This work was supported by the Japan Society for the Promotion of Science, Grant-in-Aid for Scientific Research (C) (No. 21500208).