
Abstract
Impedance control is an important technology used in the grasping control of a robot hand. Numerous studies related to grasping algorithms have been reported in recent years, with the contact force between robot fingers and the object to be grasped being primarily discussed in most cases. Generally, a coupling effect occurs between the internal loop of the grasping operation and the external loop of the interaction with the environment when a multi-fingered robot hand is used to complete a contact task. Therefore, a robot hand cannot hold an object using a large external force to complete a wide range of tasks by applying the conventional method. In this paper, the coupling of the internal/external forces occurring in grasping operations using multiple fingers is analysed. Then, improved impedance control based on the previous method is proposed as an effective tool to solve the problem of grasping failure caused by single-finger contact. Furthermore, a method for applying the improved grasping algorithm to the admittance control of a robot hand-arm system is also proposed. The proposed method divides the impedance effect into the grasping control of the hand and the cooperative control of the arm, so that expanding the task space and increasing the flexibility of impedance adjustment can be achieved. Experiments were conducted to demonstrate the effectiveness of the proposed method.
1. Introduction
With the development of robotics technology, the application of manipulators primarily used for industrial production has grown rapidly in the field of living support for humans. Since robots and humans frequently interact in daily life, technologies for soft manipulation by robots are strongly expected. The softness of a robot hand or arm brings advantages, not only the avoidance of injuries to humans but also the protection of the robot itself from unpredictable damage. One of the most effective and widely used methods of realizing soft manipulation is impedance control, by which virtual impedance can be simply generated at the end-effector of a robot [1–3].
Grasping action using a multi-fingered robot hand is one of the most important functions in contact manipulation, and dexterous and reliable grasping has been discussed [4–7]. Approaches to investigate the stability and dynamic control of an object grasped with two fingers [8,9], and stable grasping based on sensory feedback using a multi-fingered hand-arm system [10] have also been discussed. As one of the representative technologies in virtual reality, flexible grasping has been widely studied to realize force feedback for a haptic device. A grasping control method using impedance control by separately considering the force generated by grasping a rigid body has been examined from two aspects: the internal force for the grasping action, and the external force for interaction with the environment [11–13]. Although methods of state transition for grasping using one finger and isolating the external force from grasping have been proposed [14], problems such as unstable grasping caused by the coupling of the internal/external impedance and a small working space still remained.
Humans usually move their arms and hands in an efficient manner in order to complete soft manipulation. To realize dexterous manipulation comparable to that of the human hand and arm, motion control of a multi-fingered hand-arm system based on the concept of the manipulability of the finger was proposed to greatly improve the performance of a robot [15–18].
In this paper, the analysis of the coupling effect occurring in a grasping task using two robot fingers is presented. Then, an improved grasping method for the robot hand is proposed based on the concept of configuring the internal impedance and the external impedance separately. The improved impedance control algorithm proposed in this paper provides an effective tool to overcome the problem of grasping failure caused by single-finger contact that, unfortunately, could occur easily while using the previous method described in [12]. Furthermore, a control issue is proposed that applies the improved grasping algorithm to a robot hand-arm system in order to realize a flexible admittance control. Grasping experiments using the robot hand-arm system under different conditions were conducted to demonstrate the effectiveness of the proposed algorithms.
2. Overview of a Robot Hand-Arm System
A six degree-of-freedom (DOF) manipulator (PA-10, Mitsubishi Heavy Industries) was used in this study. The servo driver of the PA-10 was connected to a personal computer through an arc network. A robot hand with two 3-DOF fingers (Yasukawa Electric Co.) equipped with a 3-DOF force sensor at each fingertip was fixed to a base platform, which was attached to the end-effector of the arm. The two fingers were placed parallel to emulate the forefinger and middle finger of a human hand. A 6-DOF force sensor (10/100 BL AutoTech Co.) was mounted between the end-effector and the base platform of the hand as shown in Fig. 1. Data from the force/torque (F/T) sensors were inputted through an analogue-to-digital (A/D) board (AD12-64(PCI), Contec Co.) installed in the computer. The control sampling time interval denoted as T (= 5 ms) was determined by an interrupt signal generated by an external timer on a digital-to-analogue (D/A) board (DA12-16(PCI), Contec Co.).
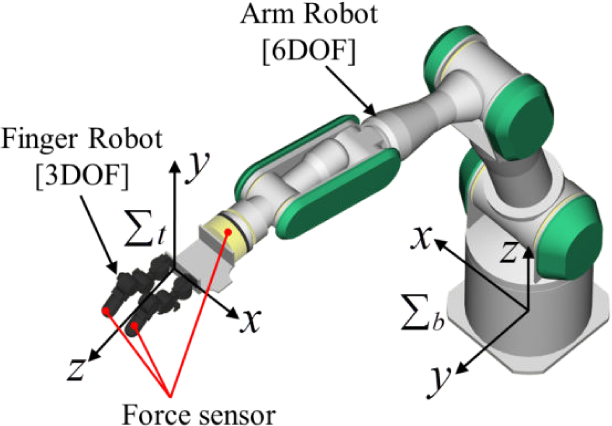
Schematic diagram of a robot hand-arm
As shown in Fig. 1, the base coordinate of the arm and the end-effector coordinate of the arm are denoted by Σb and Σt, respectively. The position and orientation of the end-effector of the arm in Σb is given as
b

while
b

3. Grasping Control Using Two Fingers
3.1 Method of Impedance Control
An impedance model using two robot fingers is shown in Fig. 2. To avoid the influence of coupling impedance, a method of calculating the impedance separately for the internal and external force was proposed [12]. According to that method [12], the contact force occurring at the ith fingertip can be computed by:

External and internal impedance model


where kep, ked are the stiffness and damping of the external force, respectively; kip, kid are the stiffness and damping of the internal force, respectively; xe is the centre position between the two fingertips and xGo is the grasped object's centre of gravity. Thus, the external force fe and internal force fi can be calculated by:


From Eqs. (4) and (5), it is evident that the external force fe is proportional to the position change of the grasped object, and that internal force fi is proportional to the distance between the fingertips. Coupling between the impedance of the external force and the impedance of the internal force occurs in the grasping task. Generally, a stable grasp can be completed when the impedance of the internal force is set dominantly. However, an unstable grasp by single-finger contact may occur if the impedance of the external force works dominantly. The primary cause of an unstable grasp can be considered as being when the external force is decomposed and equally exerted on the two fingers, as shown in Fig. 3, which easily triggers the state of single-finger contact. To overcome the above problems, we proposed an improved method based on the study [12]. As shown in Fig. 4, one of the two fingers is set to respond to the external force according to direction of the external force. As a result, single-finger contact caused by the external force can be avoided. As shown in Fig. 4, forces exerted on the two fingertips can be calculated by:

The reported method [7]

Concept of the improved method


where xi is the distance between the two fingertips. According to Eqs. (6) and (7), the external force fe and internal force fi can be obtained by:


Therefore, an impedance control algorithm for two robot fingers is realized by applying the improved concept:

where fd1(k) and fd1(k) are the desired force at time t = kT exerted on Finger 1 and Finger 2, respectively. Eqs. (10) and (11) can be easily rewritten for a hand working in 3D space.
3.2 Grasping Experiments Adding a Static External Force
Experiments of grasping a rubber block with two fingers were completed as shown in Fig. 5. Compared with the other materials, a rubber block is readily gripped and suitable for grasping. After the two fingers pinched the object, an operation of moving the grasped object at a velocity near zero along Trajectory 1 was conducted to evaluate the internal and the external impedances. Other conditions are indicated below.

Moving trajectory in the experiments
Two fingers pinched the object so that its initial position
Three objects with different sizes were grasped:
Width of Object 1: 0.01 m,
Width of Object 2: 0.04 m,
Width of Object 3: 0.07 m.
Desired positions xed = 0,0.015, 0.03 m.
Internal stiffness kip = 80 N/m,
External stiffness kep = 40, 80 N/m,
Internal damping kid = 0 Ns/m,
External damping ked = 0 Ns/m.
For comparison, an experiment was conducted using the previous method expressed in Eqs. (2–5), and the obtained results are shown in Figs. 6 and 7. The desired stiffness of both the internal and the external forces is shown in Figs. 6 and 7. However, the grasp action failed at the place marked as ○ in Figs. 6(a) and 7(a). Failed grasping is also marked as ① and ② in Figs. 6(b) and 7(b) for Object 1, Object 2 and Object 3, respectively. The primary cause leading to grasp failure is that single-finger contact occurred owing to the coupling of the internal and external impedances. We know from Fig. 3 of the previous method that because the external force is shared by the two fingers, grasping fails when a comparatively strong external force is applied. The experimental results suggest that single-finger contact occurs easily, primarily when xed or kep was given a comparative large value as shown in Fig. 7(b). Therefore, the parameter of kep was primarily changed to verify the effectiveness of the control method.

Results when kep = 40N/m, kip = 80N/musing the previous method (static operation)

Results when kep = 80N/m and kip = 80N/m, using the previous method (static operation)
Results of using the proposed method given by Eqs. (6–9) are shown in Figs. 8 and 9. Compared to the results obtained by the previous method shown in Figs. 6 and 7, the distance between the two fingers is kept nearly the same as the width of the grasped object as shown in Figs. 8(b) and 9(b). This is because the proposed method allows the external force to be exerted primarily by one finger as shown in Fig. 4. Therefore, single-finger contact was effectively avoided by using the improved method.
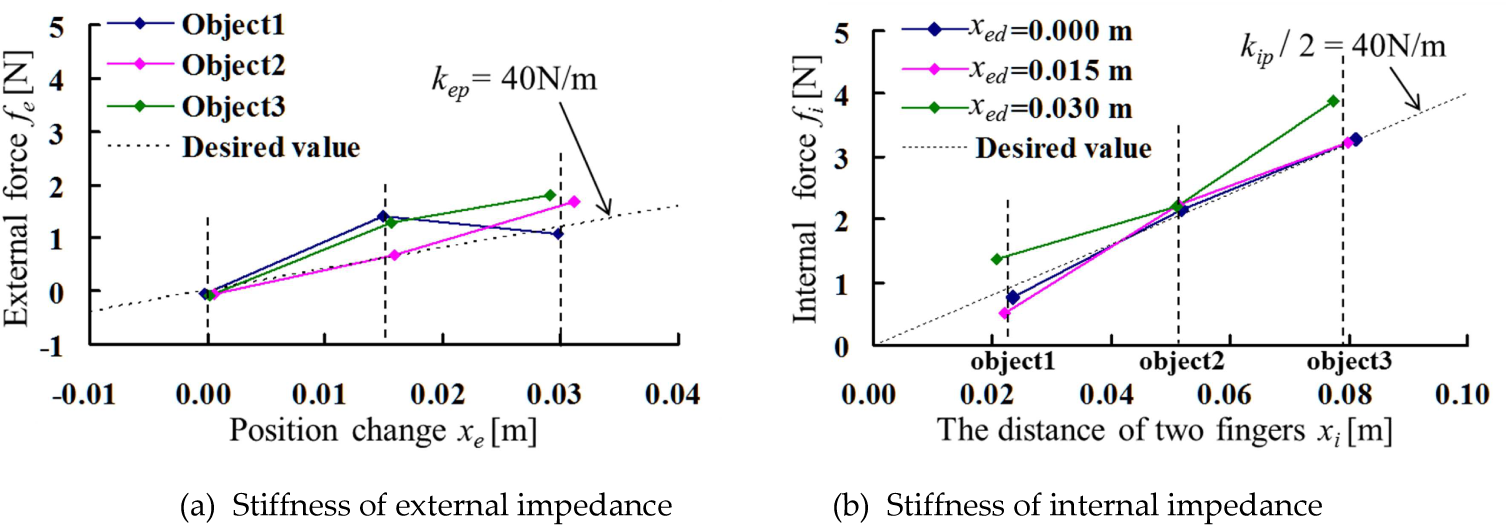
Results when Kep = 40N/m and kip = 80N/m using the improved method (static operation)

Results when kep = 80N/m and kip = 80N/m using the improved method (static operation)
3.3 Grasping Experiments Adding a Quasi-Static External Force
Experiments of grasping a rubber block in the condition of adding a quasi-static external force were also completed. An operation of moving the grasped object twice along Trajectory 2 as shown in Fig. 5 was conducted. Because of the short link size of the robot finger, external stiffness kep was especially adjusted in the experiments. Other conditions are given below.
Width of the rubber block: 0.04 m.
Moving velocities υd of the grasped object: 0.01, 0.03 and 0.06 m/s.
Internal stiffness kip = 80 N/m,
External stiffness kep = 40, 120 N/m,
Internal damping kid = 0 Ns/m,
External damping ked = 0 Ns/m.
Stiffness results gathered using the previous method given by Eqs. (2–5) are shown in Figs. 10 and 11. Hystereses can be observed in the figures because of the backlash of the gears and friction of the motors. Deterioration of stiffness occurred easily, particularly when velocity υd increased as shown in both Figs .10(a) and 11(a). However, such deterioration was also observed in Figs. 11(a) and 12(a). This was considered to result from the influence of a noisy signal from the force sensor and large friction existing in the gears of the robot fingers. Single-finger contact was not observed when kip was larger than kep as shown in Fig. 10(b), whereas the grasping task failed because the distance between the fingers was larger than the width of the object when kip was comparatively smaller than kep, as shown in Fig. 11(b).

Results when kep = 40N/m, and kip = 80N/m using the previous method (quasi static)

Results when kep = 120N/m, and kip = 80N/m using the previous method (quasi static)

Results when kep = 40N/m, and kip = 80N/m using the improved method (quasi static)
Grasping actions using the improved method given in Eqs. (6–9) were conducted, and the obtained results are shown in Figs. 12–13.

Results when kep = 120N/m, and kip = 80N/m using the improved method (quasi static)
The figures indicate that the distance xi between the two fingers is the same as the width of the object as shown in Figs. 12(b) and 13(b), which demonstrates that the unstable state of single-finger contact can be successfully avoided by using the improved method. In fact, internal force can be effectively adjusted by changing the external force via the proposed method as shown in Eq. (9). Although upside fluctuation in Figs. 12–13 obtained using the improved method is comparatively larger than that obtained using the previous method, the performance of the robot system using the proposed method can be improved by carefully adjusting the control parameters.
4. Admittance Control of the Robot Hand-Arm System by Applying the Improved Method of Impedance for the Internal and External Forces
4.1 Control Algorithm
In Section 3, a grasping algorithm for a hand with two fingers was discussed using both the previous and improved algorithms. However, we know that two fingers only move in a limited space because of their small link sizes. To emulate the motion of the human upper limb, a hand with two fingers is fixed at the end-effector of an arm to configure a robot hand-arm system. In this study, we proposed a control algorithm for a robot hand-arm system by applying the improved method of computing impedances to the internal and the external forces separately.
Admittance control is one of the cooperative control methods for a robot hand-arm system [16–18]. It is generally achieved by the impedance of the robot hand-arm system through position control. If the improved method given by Eqs. (6–9) is applied to admittance control of a robot hand-arm system, the equivalent impedance designed for the grasped object can be shared by the arm and the finger so that a further soft cooperative control and a wide impedance space can be achieved. The concept of the proposed control is shown in Fig. 14, and its block diagram is drawn in Fig. 15. The dynamics of the admittance effect of the robot hand-arm system at time t = kT is calculated by using the virtual mass

Admittance control of the robot hand-arm system

Block diagram of the proposed admittance control

where
b

As shown in Fig. 14, the equivalent stiffness

4.2 Experimental Conditions and Control Parameters
In this section, experiments were conducted by applying both the improved grasping algorithm and the previous method to the admittance algorithm of the arm. Impedance parameters were determined empirically to assure stability of the finger-arm system based on the preliminary experiments [19]. Conditions and parameters were determined as below.
Width of the rubber block: 0.04 m.
Moving the grasped object along the negative x direction (0 m → 0.06 m→ 0 m → 0.06 m→ 0 m) at a speed of 0.02 m/s.
For the hand:
Internal stiffness kip = 80 N/m,
External stiffness kep = 40, 120 N/m,
Internal damping kid = 0 Ns/m,
External damping ked = 0 Ns/m.
For the arm: (impedance effect in the x direction)
Virtual mass Max =1 kg,
Virtual damping Dax= 70 Ns/m,
Virtual stiffness Ka = 150 N/m.
From Eq. (13), desired stiffness Krx = 52.17, 92.31 N/m.
4.3 Results and Discussion
The experimental results obtained using the proposed method under the conditions of different kep are shown in Figs. 16 and 17, respectively.
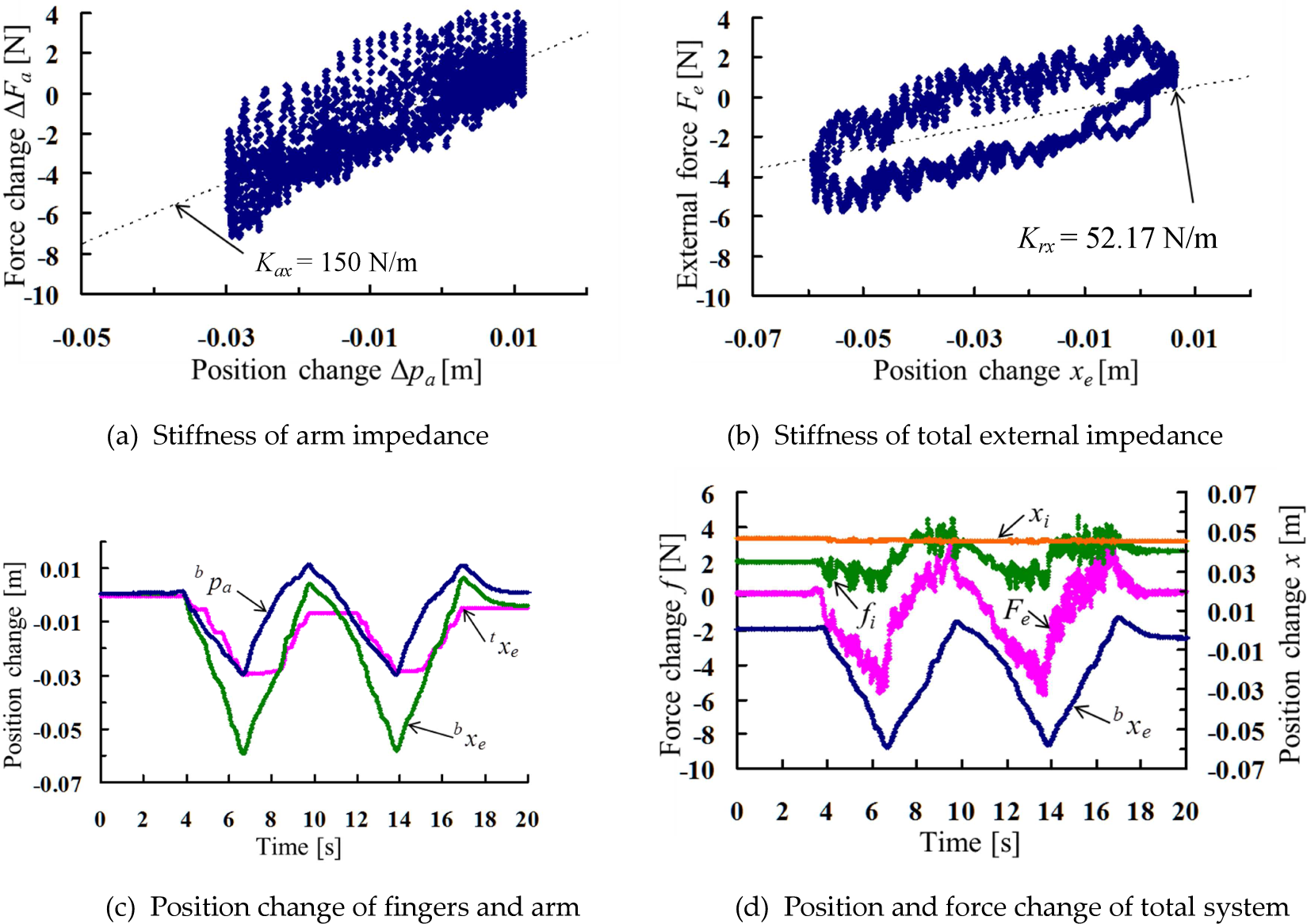
When kep = 40N/m, kip = 80N/m and Kax = 150N/m using the improved method

When kep = 120N/m, kip = 80N/m and Kax = 150n/m using the improved method
Figures 16(a) and 17(a) show the stiffness results Kax of the arm, while Figs. 16(b) and 17(b) show the equivalent external stiffness Krx of the robot hand-arm system. As shown in Figs. 16 and 17, the desired stiffness Kax and Krx required for the robot arm and the hand-arm system, respectively, were nearly achieved, being almost same as the results shown in Fig. 18(a) using the previous method.

When kep = 120N/m, kip = 80N/m, Ka = 150N/m using the previous method
Figures 16(c) and 17(c) show the results of the position change of the robot fingers and arm, while Figs. 16(d) and 17(d) show the position and force results of the robot hand-arm system.
Results for the finger distance xi were kept constant, as indicated in Figs. 16(d) and 17(d), which means that the state of single-finger contact was effectively avoided. As shown in Figs. 16(c) and 17(c), txe is the central position of the two fingers in Σt, bxa is the position of the end-effector of the arm in Σb and Σb and bxe is the central position of the two fingers in Σb. As described above, the given task of moving the grasped object over a distance of 0.06 m is too difficult to complete using only two fingers, because of their small link sizes. However, with the cooperative movement of the arm controlled by the proposed algorithm, the robot hand-arm system completed the task as indicated in Figs. 16(c) and 17(c).
As a comparison, experimental results using the previous method are given in Fig. 18. The stiffness results shown in Fig. 18(a) using the previous method demonstrate almost same performance as the proposed method given in Figs. 16(b) and 17(b). However, results of the finger distance xi fluctuated when the external force increased to the peak as shown in Fig. 18(b), which is conducive to the state of single-finger contact that occurred. The finger distance xi is controlled by the internal force, which is actively adjusted with the change of the external force via the proposed method shown in Eqs. (8–9).
Another interesting result as demonstrated in Fig. 16 and Fig. 17, is that the movements of the fingers and arms can be efficiently adjusted by acquiring the desired external stiffness. When the external stiffness kep = 40 N/m was set as shown in Fig. 16(c), the maximum central position txe in Σt moved by nearly the same distance as the position bxa in Σ b of the arm's end-effector. However, when external stiffness kep = 120 N/m, as shown in Fig. 17(c), the maximum moving distance of the arm was more than twice the maximum moving distance of the robot finger.
5. Conclusions
In this study, we proposed an improved grasping method for two robot fingers using the concept of configuring impedances for the internal and the external forces separately. As a result, unstable grasping caused by single-finger contact could be effectively avoided. We also applied the improved grasping method to the admittance control of a robot hand-arm system. Grasping experiments under various conditions were conducted, and the experimental results demonstrated the effectiveness of the proposed control algorithm.