
Abstract
The performance of task-space tracking control of kinematically redundant robots regulating self-motion to ensure obstacle avoidance is studied and discussed. As the sub-task objective, the links of the kinematically redundant assistive robot should avoid any collisions with the patient that is being assisted. The shortcomings of the obstacle avoidance algorithms are discussed and a new obstacle avoidance algorithm is proposed. The performance of the proposed algorithm is validated with tests that were carried out using the virtual model of a seven degrees-of-freedom robot arm. The test results indicate that the developed controller for the robot manipulator is successful in both accomplishing the main-task and the sub-task objectives.
1. Introduction
An exciting subset of service robotics research focuses on assistive robotics, resulting in several different robotic platforms being developed to assist disabled people [1]. The main aim of these systems is to provide support to a disabled person in his/her activities of daily living such as meal-serving and drink-serving, which are accomplished by using the semi-autonomous task execution principle (see Figure 1). It should be noted that a quadriplegic person is continuously inside the workspace of a robot arm during the application of this service robot.

Overview of the FRIEND system [2]
Safety has been a significant concern during the development of service robots in each step of design iteratively to identify and assess the potential hazards. In addition, all aspects of the manipulator design, including the mechanics, electronics and software, should be considered [3]. Among these, in the complexity of a Human-Robot Interaction system (HRI), the physical viewpoint is mainly focused on the risks of collisions occurring between the robot arm and its user or, in this case, the patient. In such a scenario, the robot may cause serious harm or adverse effects to humans [3].
Since the most critical hazard can result from the collision of the robot arm with the user, the user area is usually separated from the robot workspace and, sometimes, it is monitored via two laser scanners, as it was done in the FRIEND system [1]. However, in the case of serving a meal to a quadriplegic person, the person is inside the workspace of the service robot, as shown in Figure 2. One possible approach is to reduce the power supply of the robot arm to provide safe operation near the user and minimize the transfer of energy/power to the user.

Robot operation sequence for the “prepare and serve a meal” support scenario [2]
When there are obstacles, such as the human body within the workspace of a robot, another possible scenario is that the human body may collide with the links rather than the end-effector, since the desired end-effector pose trajectory is mostly chosen to avoid obstacles. In this case, obstacle avoidance algorithms are required to move the links away from the user while performing the main task. Since a kinematically redundant robot manipulator (or, in short, a redundant robot) has more DoF than required by its specified task [4], it can have an infinite number of possible configurations when tracking a given end-effector pose trajectory. According to the authors' best knowledge, Nakamura [5] was the first researcher to name the motion of the links of a redundant robot that does not affect the end-effector motion as self-motion. This self-motion takes place in the null space of the redundant robot. In [30], an overview of the possible null space projections is provided. The null space projection used in this study is presented in Subsection 3.2. In addition to tracking a given end-effector pose trajectory, sub-tasks or secondary tasks can be accomplished by appropriately controlling the self-motion, which is usually called redundancy resolution. Generally, an objective function is defined to resolve the redundancy. The sub-tasks that have been widely investigated are obstacle avoidance [6, 7], mechanical joint limit avoidance [8] and the minimization of joint velocities or accelerations [9].
Prior research addressed obstacle avoidance algorithm designs as a sub-task for redundant robots [10–16] and a review of null-space. In these studies, the common approach was to first identify the closest points on the links of the redundant robot to the obstacles and then design a sub-task objective function to keep those points away from obstacles. In [10] and [11], one stationary obstacle was considered and the objective function to be maximized was chosen as the distance between the links of the redundant robot to avoid a collision. For the case of multiple obstacles, the objective function in [10] and [11] was modified in [12] to be equal to the sum of the minimum distances to each obstacle. An alternative formulation in [13] considered the square of the minimum distance as an objective function. Alternatively, [14] preferred to utilize the reciprocal of the minimum distance as the objective function. Other studies, such as [15], equipped a redundant robot with multiple proximity sensors to avoid collision with obstacles. However, as highlighted in [16], utilizing the minimum distance in the objective function is problematic when there are multiple obstacles in the workspace of the robot.
A good review of existing methods for controlling redundant robots is given and the reviewed methods are examined in [29]. Since it was advised in [29] that, for redundant robots, task space control seems to be the most suitable control approach, in this study, a task-space controller derived from the work presented in [17] is used.
To address the lack of appropriate obstacle avoidance algorithms for redundant robots, this study aimed to formulate a novel obstacle avoidance sub-task objective function. Firstly, in Section 2, related works on obstacle avoidance are presented and the shortcomings of these are discussed. Before the description of the new method to provide a solution to these types of shortcomings, the kinematic and dynamic models of a redundant robot are given to form a base for the control design in Section 3. In Section 4, the feedback linearizing controller in [17] is utilized to achieve the main control objective, which is tracking the desired end-effector pose trajectory. The controller includes an auxiliary term to fuse a sub-task controller for achieving a secondary objective, which, in this study, is obstacle avoidance. The general design of the objective function is also presented in Section 4. In Section 5, the new algorithm proposed in this study to compensate for the discussed shortcomings previous methods is described. Section 6 presents the results of the detailed numerical tests on the redundant robot used in the FRIEND system (LWA4-Arm by Schunk GmbH) to demonstrate the viability of the proposed obstacle avoidance algorithm. Depending on the given main task, this redundant robot may have several redundant (i.e., extra) DoF. Therefore, it has more flexibility in terms of possible configurations than a planar scenario. In the first set of numerical tests, two obstacles are used to evaluate the difference of the new algorithm with the existing algorithm. Later, numerical tests for a single obstacle are presented to evaluate the performance of the new algorithm and the parameters that affect this performance. This paper is finally concluded with discussions on the test results.
2. Related Work on Obstacle Avoidance Sub-task Formulation
The purpose of the obstacle avoidance sub-task formulation is to select an objective function that keeps the closest points of the links to the obstacles away from the selected obstacles. Among the various studies carried out on this topic, the most common methodology for avoiding obstacles is to optimize an objective function using the self-motion of the redundant robot while completing the main-task.
Generally, an objective function is chosen in relation to the minimum distance between the links of the redundant robot and the obstacles. The simplest objective function is obtained by setting

where
For all of the mentioned objective functions, as discussed in [16], there are several shortcomings of using the minimum distance, especially when there is more than one obstacle. In Figure 3.a, points P 1 , P 2 and P 3 represent the point obstacles that lie on the same line perpendicular to the link. The minimum distances from P 1 , P 2 and P 3 to the link are calculated as d 1 , d 2 and d 3 , respectively. For a finitely small amount of counter-clockwise rotation δq 1 for the joint variable, q 1 , δd 1 , δd 2 and δd 3 can be written as

Point type of obstacles near the link: (a) P1, P2 and P3 lie on the same line; (b) P1 and P2 lie on the same line; (c) P1 is closer than P2 to the centre of rotation [16]

In view of (2), it is clear that, for a small amount of joint motion, all of the obstacles occurring along the same line perpendicular to the ith link have the same norm of distance gradient with respect to q
i
regardless of the distance between the link and the obstacle (which is equal to the projection of the obstacles to the link or in this case,
In the configuration presented in Figure 3.c, P
1
is closer to the link and its probability of collision with the link is higher. However, the objective function in (1) will drive the first link in the counter-clockwise direction, which results in an increase in d
2
since the gradient of d
2
is greater than that of d
1
. This problem gets even worse when the objective function is chosen as the square of the minimum distances since its gradient is now weighted by each distance. As such, obstacle P
2
has the dominant gradient (d
2
∇d
2
) over P
1
(d
1
∇d
1
). Even if the objective function is selected as the reciprocal of the distances, there will be problems. Consider the case where d
1
and d
2
are the same for the configuration in Figure 3.c, (
3. Model of the Redundant Robot
In this section, the kinematic and dynamic models of the redundant robot, along with the model properties, are given. In this work, an n -DoF robot with the dimension of its workspace being m is considered with
3.1. Kinematics model
The end-effector position

where

where

where


where

when J has full rank (i.e., the manipulator is not in a singular configuration). Notice that
3.2. Dynamic model
The dynamic model for an n-link, all revolute-joint robot manipulator has the following form [20]

where
4. Control Objective
The tracking objective is to design the torque input vector
4.1. Main-task control objective
Since the main aim of this study is to design an obstacle avoidance sub-task and better present the performance of the proposed sub-task function, accurate knowledge of the kinematic and dynamic models are assumed, along with the availability of full-state feedback (i.e., joint position vector and joint velocity vector are available).
To quantify the task space tracking objective, tracking error, denoted by

where

where Kv and Kp are constant, positive definite, diagonal gain matrices,
4.2. Sub-task control objective
Consider a vector function

The auxiliary control term

where KN is a constant, positive definite and diagonal gain matrix. Taking the time derivative of the null space velocity tracking error in (12) results in

and then substituting the auxiliary controller in (13) yields in

In view of the closed-loop null space velocity tracking error in (15), the auxiliary controller in (13) ensures that the joint velocities in the null space converge to
4.3. Sub-task objective function
The projection of the vector function g onto the null space of J can be considered as the desired null space joint velocities, which will be designed to accomplish a given sub-task. To control the self-motion of the redundant robot, the vector function g is designed as

where
In the next sections, related work on an obstacle avoidance sub-task and the new formulation for an obstacle avoidance sub-task are described in detail.
5. New Algorithm for Obstacle Avoidance
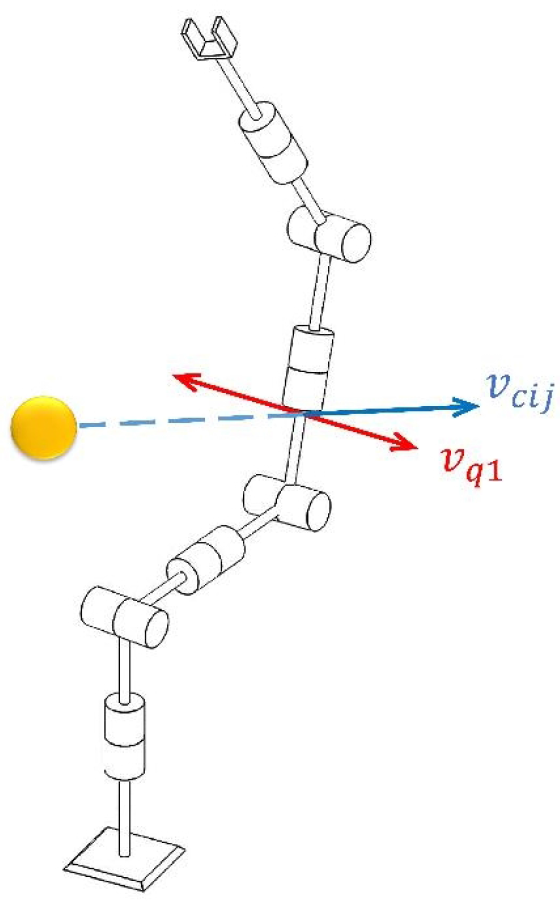
The objective of this sub-task is to keep the closest point on the links away from the selected obstacles. The first step involves the calculation of distance and its unit vector direction by finding the location of the point X
Cij
(called the critical point c) on each link i =1,2,‥, n that is nearest to the obstacles (the obstacle number is given by j=1,2,…,
Since exact trajectory tracking for the critical point with respect to obstacles is not in question, a simple obstacle avoidance scheme can be achieved by means of the Jacobian matrix transpose method [23, 24];
where
In this method, the escape velocity

In (18), vm is the maximum escape velocity scalar and
When the proposed formulation is analysed for a spatial robotic arm, it can be shown that it has two drawbacks:
The first drawback happens when the obstacle and robot arm are situated in such a position that the escape velocity vector
Sketch of the robot arm when the escape velocity of a link is perpendicular to the instantaneous motion of the same link with respect to a joint motion
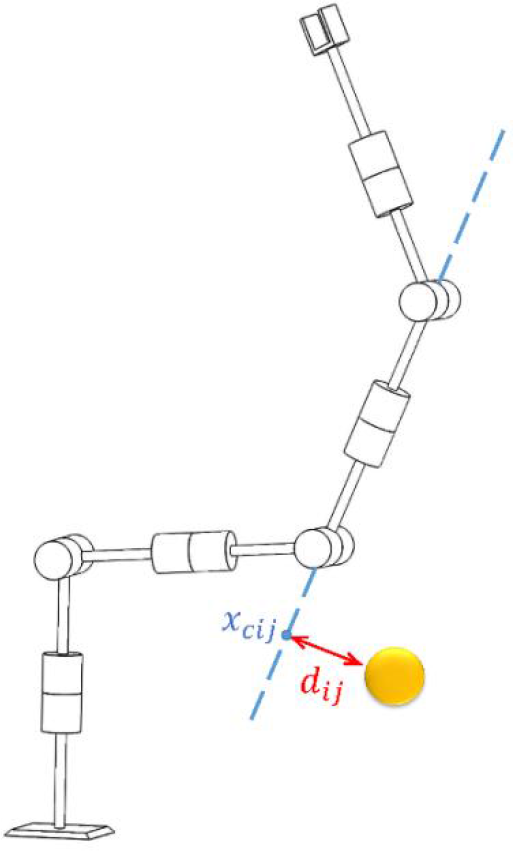
In the case defined in Figure 4, the calculated velocity of the first joint in the null space to move the fourth link away from the obstacle will be zero. As a result, there will be no sensation in that joint to that obstacle. This critical scenario will continue unless the end-effector trajectory in the main task goes through a motion that changes this perpendicular angle of the velocity vectors. The possible collision scenario for this specific case is simulated in Figure 5 as a sequence of motion captures. In Figure 5, the robot link's visual representation is shown with red ellipsoids. The obstacle is the yellow circle. The blue arrow shows the direction of the task space motion of the end-effector. It can be observed that the collision happens at the 12th second.

Sequence of motion captures for the special case scenario
The second drawback is valid for all of the mentioned obstacle avoidance techniques. It is when the minimum distance between the obstacle and the link intersects with the imaginary extension of that link at the critical point X Cij , as shown in Figure 6. In this case, the related link will still be moved to avoid the obstacle, despite the fact that it is not likely to collide with the j th obstacle.
Sketch of the robot arm when the distance of a link from the obstacle is calculated with respect to the extension of a link
6. Simulation Results
To illustrate the performance of the proposed obstacle avoidance sub-task objective function for the self-motion control of redundant robots, a set of detailed numerical test results are presented. In these tests, the virtual model of 7 DoF LWA4-Arm manufactured by Schunk GmbH is used. For simulation purposes, the dynamic and kinematics models of the 7 DoF LWA4-Arm are obtained by using the method described in [25] in two stages. First, the robot arm is modelled by SolidWorks software with respect to the CAD data provided in [26], as shown in Figure 7. Then, the CAD model is exported in 3D XML format to MATLAB Simulink by using the plug-in, SimMechanics Link. As a result of the transfer of the model from CAD environment to SimMechanics, the model could be used for numerical tests to evaluate the performance of the proposed obstacle avoidance algorithm.

The CAD Model of 7-DoF LWA4-Arm
The second stage includes the modelling of the control system and development of the necessary kinematics and dynamic equations of the robot by using MATLAB Simulink blocks that are based on the kinematics of the robot defined in Table 1. The visualization tools of SimMechanics are also used to display and animate 3D robot geometries, before and during simulation.
Denavit-Hartenberg parameters of LWA4-Arm

The numerical tests were conducted with MATLAB Simulink with a fixed-step sample time of 0.1 kHz. The manipulator is considered to be initially at rest at the joint positions q= [0 −25 0 −35 0 −10 0] T in degrees.
In the first set of simulation tests, the new algorithm presented in this paper is evaluated against a previously developed algorithm. With the next set of simulation tests, the new algorithm performance and the parameters that affect this performance are evaluated.
6.1. Test results to compare the previous algorithms and the new algorithm
This set of tests is conducted to compare the new algorithm performance with the previously presented methods. As a representative of the previously developed methods, the objective function is selected as the reciprocal of the minimum distance between obstacles and the nearest point on the link. In this case,
In order to compare the new algorithm with the older ones, two obstacles are located within the workspace of the robot arm at ob 1 = [0.04 0 0.65] T and ob 2 = [0.14 0 0.32] T , as shown in Figure 8.
Two obstacles placed inside the robot's workspace
The main task of the selected manipulator is to hold its tip point position at a constant location. In this case, the robotic arm will only perform a motion in its null space. A constraint is formulated so that the manipulator moves as if it is a planar 3-DoF arm in the plane presented in Figure 8. In order to simulate planar arm motion, joints one, three, five and seven are fixed and only joints two, four and six are controlled for the task. The distance of link two with respect to the obstacles is initially kept as do 1 and do 2 at 71.66 and 78.43 mm, respectively.
The next figures reveal the difference between the two methods. In Figure 9, the sub-task controller with the proposed obstacle avoidance sub-task formulation in (17) and (18) are used. It can be observed that the distances between obstacle one and link two (do 1 ) and the distance between obstacle two and link two (do 2 ) are balanced in the time at relevantly similar distances.

Distance of link two to obstacle one and two by using the new algorithm
When the reciprocal of the minimum distances algorithm is used, the test concludes with link two moving much closer to obstacle two, as depicted in Figure 10. This is because the distance rate of do 1 was initially larger than that of do 2 , similar to the case described in Figure 3.c.

Distance of link two to obstacle one and two by using the reciprocal of distances method
6.2. Performance evaluation tests of the new algorithm
A common benchmark test for all simulations is designed and Figure 11 shows the desired task-space trajectories for this test. The trajectory is selected to track the positions only in the Cartesian space without constraining the orientation of the end-effector.
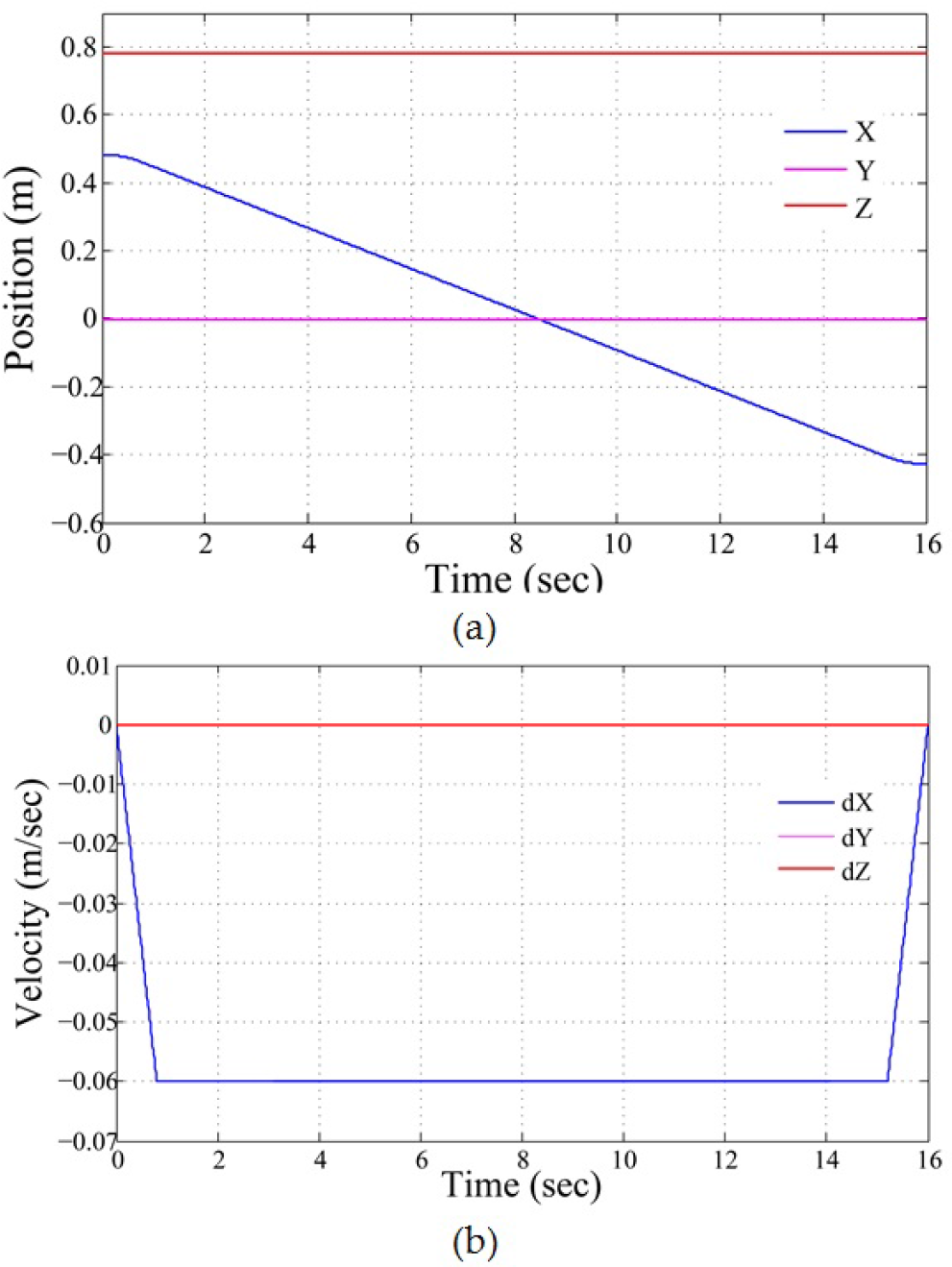
Desired task-space trajectories: (a) desired position trajectory, (b) desired velocity
For this scenario, the manipulator had four extra DoF than the required DoF to perform the main objective. This gave the robot manipulator increased flexibility when carrying out the task used to execute obstacle avoidance as a sub-task.
In the controller presented in (11), the nonlinear terms, which include centripetal and Coriolis
The control gain matrices, Kv, Kp and KN are tuned iteratively and set to have values of 200, 200 and 170 for each element on the diagonal respectively in order to obtain acceptable end-effector tracking performance for the given task. The sub-task objective function parameter vm was chosen as 20 when the obstacle was located at
Figure 12 shows the end-effector tracking errors during simulation, which are the main task errors. From this result, it can be observed that the end-effector position tracking error remained within a small bound of less than 0.2 mm after four seconds. This indicates that the main-task objective is successfully achieved. The larger error at about one second is due to a sudden configuration change, which is discussed later in this paper.

Main-task error calculated with respect to the measured end-effector trajectory
The joint velocities for numerical simulation are given in Figure 13. The joint velocities, except the ones during the time interval between zero and two seconds, are observed to be larger than if the sub-task was chosen as the minimization of the joint velocities. When the manipulator is away from the obstacles, the escape velocity is minimized but it does not go to zero. Thus, the joint velocities may receive higher magnitudes in achieving this sub-task.

Joint velocities measured during the simulation
The importance and the effect of assigning sub-task objective can be observed from the measured joint velocities in Figure 13. After the first second, a sudden change of configuration can be observed. This sudden configuration change results in higher velocity demands at the joint level. Since the designed controller does not account for the velocity-related nonlinear effects, such as Coriolis and centripetal effects, the faster motion demand results in larger main-task trajectory tracking errors. This can be observed at the same time intervals in Figure 12. The sudden configuration change is illustrated in Figure 14 with screenshots taken during the simulation. It is observed from the screenshots that the sudden configuration change initiated at second 1 and terminated at second 1.8. The blue line in the screenshots indicates the direction of end-effector position trajectory, which is the main task of the manipulator. It is important to observe the total motion from the top view in Figure 14.b to see that the obstacle is not penetrated but the manipulator moves around the obstacle.
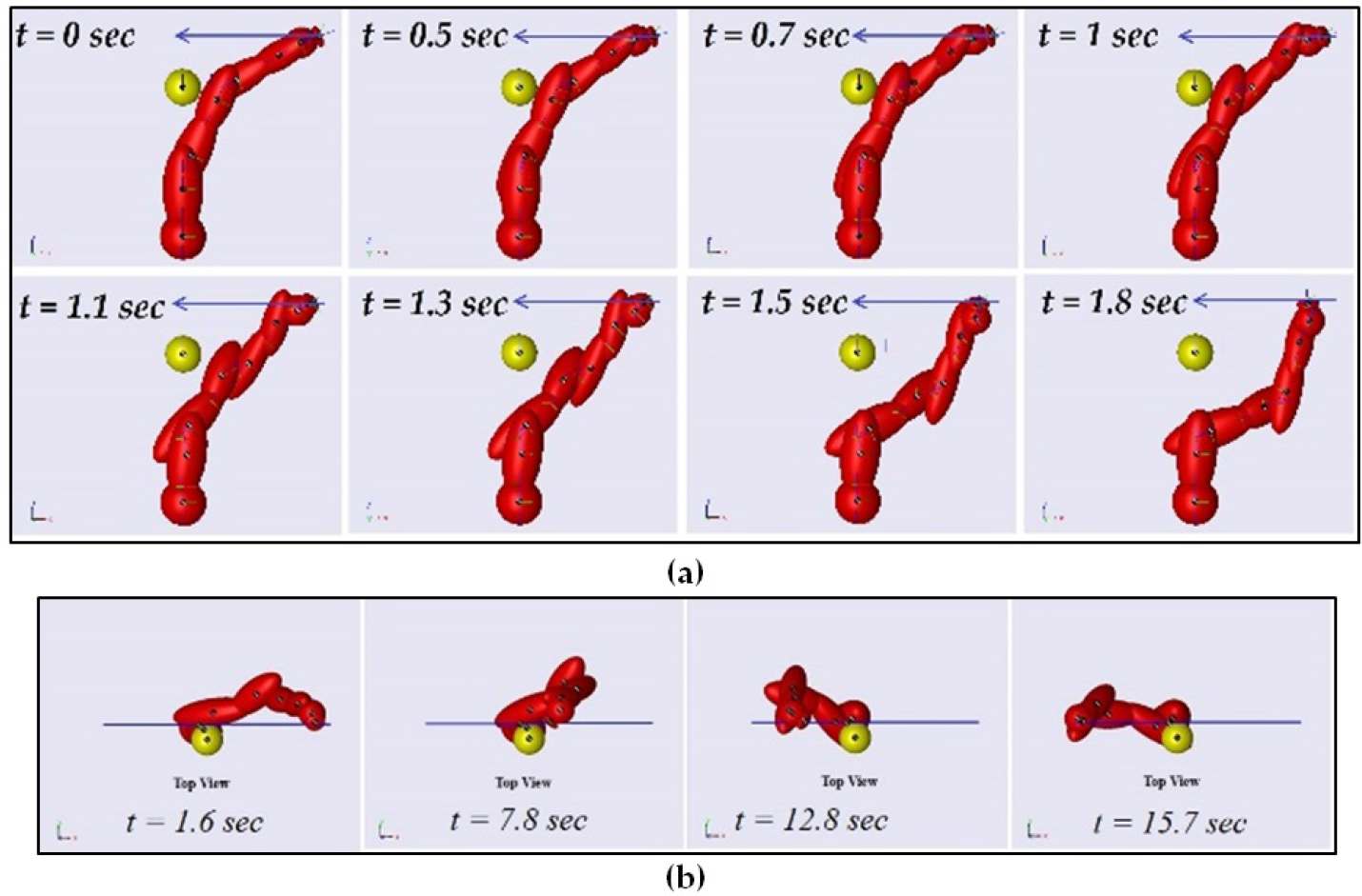
Sequence of motion captures: (a) Sudden configuration change of the manipulator, (b) Total task from top view
Figure 15 is presented to indicate the performance of the controller for sub-task execution. The sub-task error given in Figure 15 is the norm for

Norm of null space velocity tracking error
In the previous figures, the simulation results are presented for a selected escape velocity of 20 m/s. In order to investigate the effect of the escape velocity selection, a number of simulation tests are carried out. The escape velocity is varied from 0.1 to 20 m/s. The results for the obstacle avoidance performance can be investigated for all of the links. However, only the second link's behaviour is provided in this paper due to page limitations. In Figure 16, the vertical axis is the distance of the second link to the obstacle. It can be observed that at about the first second, for the escape velocities that are lower than 5 m/s, the second link almost collides with the obstacle. In fact, when the escape velocity is 0.1 m/s, the second link collides with the obstacle. However, since there is no collision model in the simulation when the collision happens, the second link moves through the obstacle.
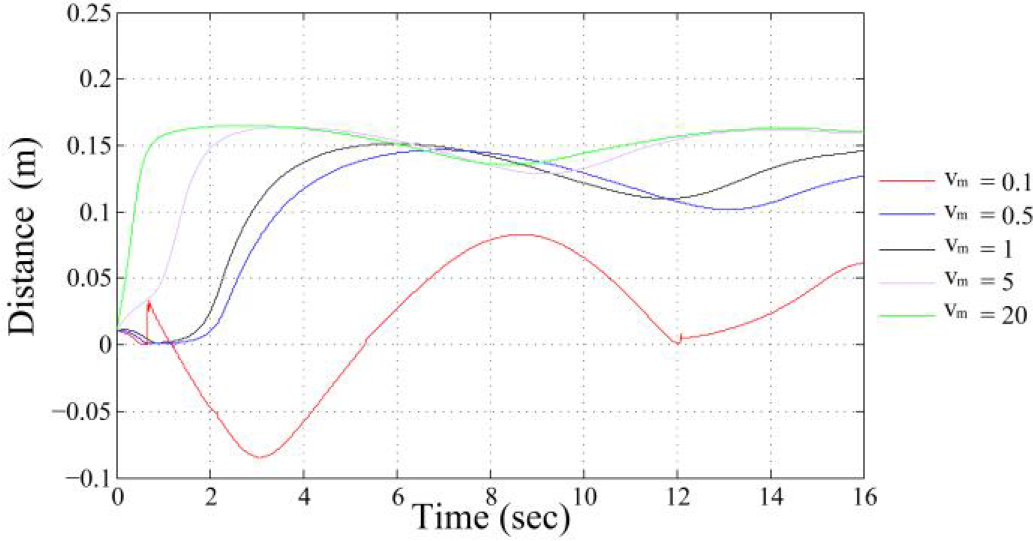
Distance between the second link and the obstacle during the same task for different escape velocity values
While the escape velocity is varied in the previous case, the main task speed is selected to be the same for all cases. In the next simulation tests, the aim is to investigate the effect of the main task speed on a selected escape velocity. The escape velocity is selected to be 5 m/s for this investigation since 5 m/s is the critical escape velocity to move the second link away from the obstacle for the specific example. The maximum task speeds in the trapezoidal velocity trajectory presented in Figure 11.b are selected as 0.06, 0.24 and 0.48 m/s. The results for these main task speeds are presented in Figure 17. In order to have a fair judgment between the performances with different main task speeds, the horizontal axis of the plot is selected to be the measured end-effector position. The motion initiates at about 0.49 m for all of the cases and the end-effector moves in the (–) x-axis. It is observed from Figure 17 that, as the main task speed is increased, the distance between the second link and the obstacle becomes smaller. Therefore, increasing the main task speed for the same escape velocity increases the chance of a collision with the obstacle.
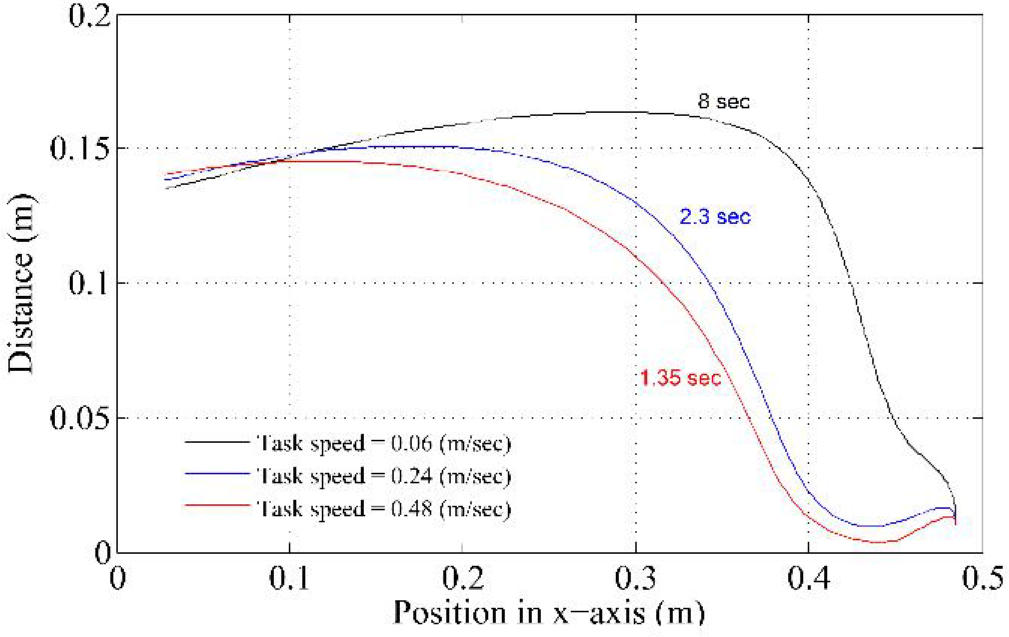
Distance between the second link and the obstacle for different task velocities when escape velocity is selected as 5 m/s
7. Discussions and Conclusions
In this paper, a new obstacle avoidance objective function is designed that utilizes the self-motion of a redundant robot to avoid contact with obstacles within its workspace. The main motivation of designing a new obstacle avoidance objective function for redundant robots is the shortcomings of the objective functions that are currently available in literature. Specifically, in previous literature, the common method is to introduce an objective function that is formed by the minimum distance between the links of the redundant robot and the obstacles. However, when the minimum distance based objective functions are utilized for multiple obstacles, as demonstrated in Section 4, the above-presented algorithms may fail to provide the priority of which obstacle will be avoided first. Subsequently, while trying to avoid the obstacle that is located further away, a collision of the robot with the obstacle that is closer to the base may be unavoidable. This is an important problem for service robots, where the obstacle to avoid is usually the operator/user.
In the new algorithm that is proposed in this work, in a novel departure from the existing research, an exponential function of the distance between the obstacles and the links was utilized. Numerical tests were performed by using the virtual model of a 7 DoF LWA4-Arm to validate the proposed obstacle avoidance objective function. In the first numerical tests, the new algorithm was tested against an existing algorithm in which the reciprocal of the distances method is used. The new algorithm provided better results in terms of keeping link two in similar distances away from both obstacles. In the next set of numerical tests, the main-task was achieved, where the end-effector tracking error remained within the magnitude of 1 mm, while the links of the redundant robot successfully avoided the obstacle.
Another issue addressed in this work is the selection of the escape velocity in the developed obstacle avoidance algorithm. A number of simulation tests were carried out to investigate the effects of selecting a different escape velocity while the main task speed is constant and selecting different main task speeds while the escape velocity is constant. The results indicated that lower escape velocities might result in the collision of the links with the obstacles. However, the suitable magnitude of the escape velocity to successfully avoid obstacles is also related with the main task execution speed. Therefore, it can be concluded that the escape velocity should be selected with respect to the task execution speed and it can be adjusted during online trajectory planning scenarios.
We would like to note that the main motivation of this study was the design of a novel obstacle avoidance objective function. In lieu of the main motivation, the exact model knowledge was considered to be available, along with full-state feedback, and the feedback linearizing controller in [17] was utilized. In this manner, we demonstrated the performance of the proposed obstacle avoidance objective function. However, when there are structured/parametric uncertainties in the dynamics, the previous work of the third author [8], which is the least-squares based adaptive version of [17], can also be utilized. Another previous work of the third author, in [27], a gradient-based Lyapunov-type version of the controller in [17] could have also been utilized. Finally, if there are unstructured uncertainties in the dynamics, then the robust controller in [15] can be utilized.
Footnotes
8. Acknowledgements
This work is supported in part by The Scientific and Technological Research Council of Turkey via (grant number 113E147).
1
A slight modification of the feedback linearization controller in [17] is utilized to achieve task-space tracking. The main reason for the preference of the controller in (![]() ) is to better demonstrate the performance of the novel sub-task obstacle avoidance objective function.
) is to better demonstrate the performance of the novel sub-task obstacle avoidance objective function.
Appendix A
The pseudo-inverse also satisfies the following
while the projection matrix onto the null space of the Jacobian satisfies
Appendix B
The closed-loop error system is given by
By assuming that we can calculate the generalized inertia matrix and nonlinear terms in the dynamic equation with some precision (
where the positive definiteness of the inertia matrix was also utilized [21]. Equating (27) and (7) results in the following closed-loop error system
where
Appendix C
It is first noted that,
Define a non-negative scalar Lyapunov function, denoted by
The time derivative of the Lyapunov function in (32) is equal to
and after substituting (15) into the above expression and after straightforward mathematical manipulations, it can easily be obtained that
The null space velocity tracking error in (12) can alternatively be rewritten as
from which it is easy to see that the joint velocities in the null space of J track the projection of g onto the null space of J.