
Abstract
The brain–computer interface (BCI) technology has received lots of attention in the field of scientific research because it can help disabled people improve their quality of life. Steady‐state visual evoked potential (SSVEP) is the most researched BCI experimental paradigm, which offers the advantages of high signal‐to‐noise ratio and short training‐time requirement by users. In a complete BCI system, the two most critical components are the experimental paradigm and decoding algorithm. However, a systematic combination of the SSVEP experimental paradigm and decoding algorithms is missing in existing studies. In the present study, the transient visual evoked potential, SSVEP, and various improved SSVEP paradigms are compared and analyzed, and the problems and development bottlenecks in the experimental paradigm are finally pointed out. Subsequently, the canonical correlation analysis and various improved decoding algorithms are introduced, and the opportunities and challenges of the SSVEP decoding algorithm are discussed.
Keywords
1 Introduction
Brain–computer interface (BCI) is defined as the direct connection between the brain and external equipment to realize information exchange. BCI has shown great application potential in many fields [1 –5] such as medical diagnosis, cognitive science, military, and entertainment. BCI systems are implemented using certain brain‐measurement techniques to collect neural activity in the brain and convert the classification commands into control signals using pattern‐recognition algorithms. Many common methods are available to measure brain activities, such as electroencephalography (EEG) [6 –9], electrocorticography (ECOG) [10 –12], and functional magnetic resonance imaging (fMRI) [13 –16]. These brain‐detection technologies can be used to collect brain activities, convert classification instructions into control signals using pattern‐recognition algorithm, and realize the corresponding BCI system. In comparison, EEG provides a number of advantages, namely, (1) high real‐time performance, (2) low cost, (3) safety, and (4) stable signal. Thus, a BCI system based on EEG is the earliest research with most mature results and widest applications [17–18].
BCI can be divided into the following three categories based on different EEG‐evoked characteristic signals: (1) BCI based on event‐related potential (ERP‐BCI) [19 –22], (2) BCI based on motor imagination (MI‐BCI) [23, 24], and (3) BCI based on steady‐state visual evoked potential (SSVEP‐BCI) [25 –27]. SSVEP‐BCI is important owing to its high signal‐to‐noise ratio (SNR) and low response time. SSVEP is a characteristic electric signal induced by external fixed visual stimulation in the cerebral cortex. The evoked response usually contains the same frequency component as the stimulated frequency and produces rhythmic periodic changes. SSVEP is believed to be a physical response of the primary visual cortex to external periodic stimuli and does not involve advanced visual information processing and cognitive psychological processes [28], which mainly appear in the occipital region where the primary visual cortex is located. In current BCI‐control systems, SSVEP can be easily induced and made to quickly respond. It is an effective method for realizing high information‐transmission rate of BCI. The SSVEP‐BCI control system is widely used because it is stable and requires no training.
EEG signals that carry the intention information of a subject features the characteristics of low SNR, nonstationary, and individual differences in SSVEP‐BCI (as shown in Fig. 1). Decoding the thinking‐state information in the brain and the control intention of a subject from the interference of various artifacts and noise is one of the most important problems in BCI system. Because SSVEP‐BCI is currently the most studied and widely used BCI paradigm, the present work introduces the SSVEP experimental paradigm. Aiming at many EEG classification algorithms in the development of SSVEP‐BCI, this work introduces the principle and application status of the canonical correlation analysis (CCA) classical algorithm, CCA improved algorithm, machine‐learning algorithm, and deep‐learning algorithm and finally summarizes the development direction of the decoding algorithms in BCI systems based on SSVEP in the future.
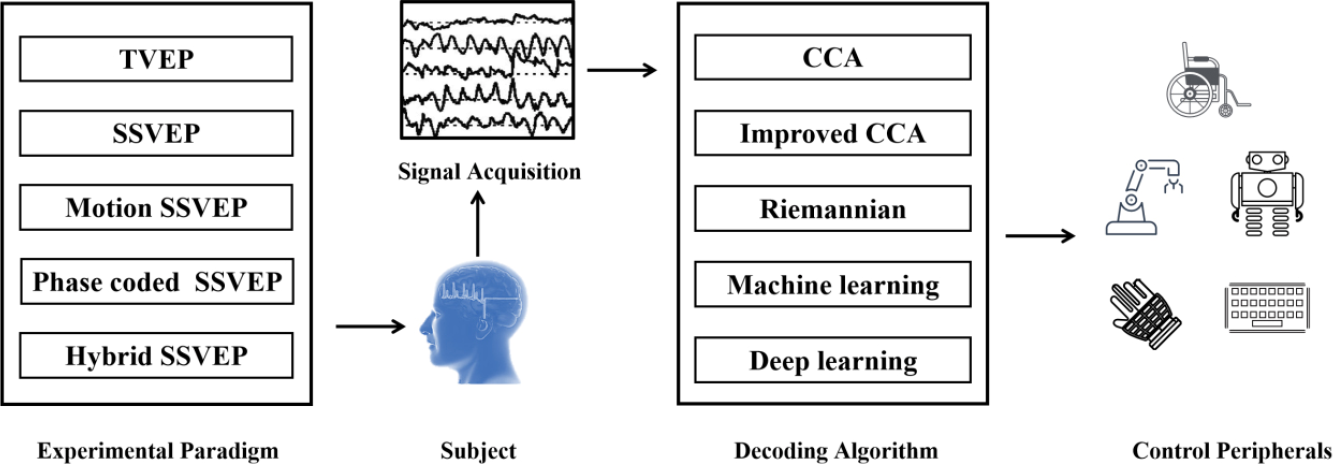
Flowchart of the BCI system based on SSVEP.
2 Experimental paradigm of SSVEP
The experimental design of SSVEP consists of a stable voltage oscillation induced by rapid repetitive stimulation, which usually includes flash lamp, light‐emitting diode, and flip chessboard displayed on a monitor. In the standard SSVEP experimental paradigm, users can see concurrent repeated stimulus displays (such as multiple scintillation stimulus blocks) located at different places in the field of vision. Each scintillation stimulus block is shown at a fixed frequency, which is different from that of the others. Each scintillation stimulus block represents a specific BCI output (such as inputting specific keyboard characters or robot‐control commands in a specific direction). Users generally need to focus on the stimuli that they want to output for selection. For example, when users focus on a 10‐Hz flashing stimulus block, 10‐Hz co‐frequency and double‐frequency EEG frequencies are induced in the occipital area of the users. Figure 2 shows that the EEG frequencies recorded in the occipital area when users focus on the 10‐Hz stimulus are displayed spectrum.
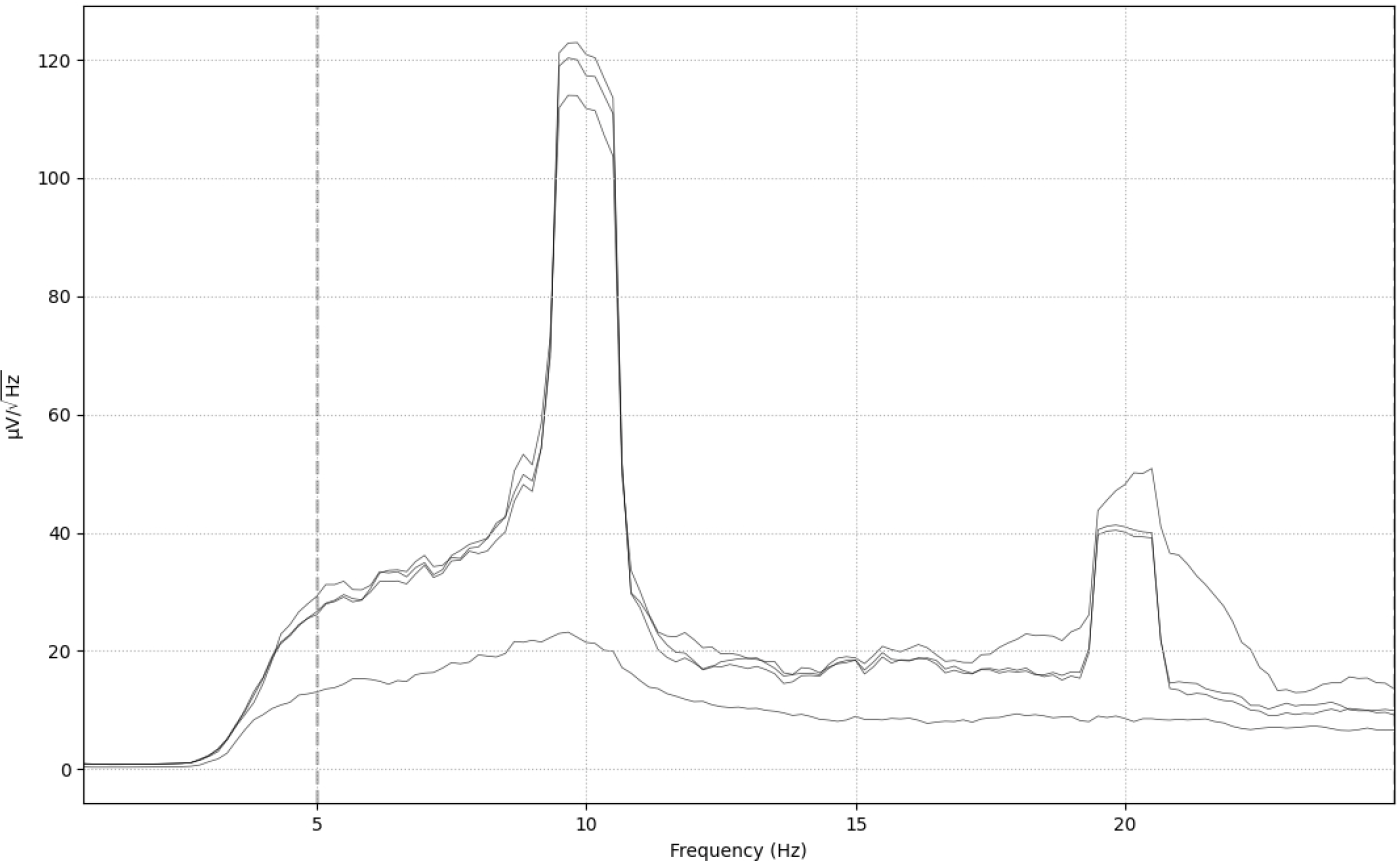
EEG spectrum recorded in the occipital region when the user focuses on 10‐Hz stimulation.
2.1 Visual information‐processing mechanism of SSVEP
All human senses are derived from activities in the sensory system. Different receptors generate sensory signals after receiving specific types of stimuli. These signals are transmitted to the center through complex processing in the sensory pathway and finally result in perception [29]. These senses include visual, auditory, and sensory stimulation, among others. Specific thinking tasks or specific external stimuli encode the electrophysiological activities in the brain, and subjects can generate different EEG signal patterns. SSVEP can be considered as a specifically encoded external stimulus. For perception of visual information, the external visual stimuli fall to the retina through the optical imaging system of the eye. After preliminary information processing on the retina, the stimuli reach the external knee body along the optic intersection of the nerve fibers. After a nerve alternation, they enter the secondary and advanced visual centers of the brain through the primary visual cortex in the occipital lobe and subsequently enter a higher level joint area located in the occipital and parietal cortices for higher level information processing [30].
When a human body is stimulated by a fixed frequency flickering vision, the potential activity of the cerebral cortex is modulated. Thus, a continuous frequency is generated, which is related to the stimulation frequency (at the fundamental frequency or frequency doubling of the stimulation frequency), which contains a periodic rhythm similar to that of visual stimulation. An SSVEP signal is expressed as an EEG signal, and a spectral peak can appear on the stimulation frequency or harmonic in the power spectrum. By analyzing and detecting the corresponding frequency at the spectral peak, the stimulus source of the visual fixation of the subject can be detected to identify the intention of the subject. When a visual stimulation device is used to obtain an SSVEP signal, six EEG channels are available that are related to the occipital visual area in the cerebral cortex. (The six channels are PO3, POZ, PO4, O1, Oz, and O2.)
In 1966, Regan induced a periodic EEG‐corresponding SSVEP with the same fundamental machine‐harmonic frequency as the visual stimulation frequency in the occipital part of the brain using a fixed frequency‐modulated scintillation stimulation on human eyes [31]. Therefore, an SSVEP signal is generally believed to be a physical response of the primary visual cortex to external periodic stimuli and does not involve advanced visual information processing and cognitive psychological processes [32]. This signal mainly appears in the occipital region where the primary visual cortex is located.
2.2 Transient VEP
In early BCI research, the transient VEP (TVEP) was considered as the input of a BCI system. In the published literature, the first article on TVEP was published by Vidal et al. in the BCI Laboratory of University of California Los Angeles [33]. Vidal et al. first applied TVEP to the study of BCI. In 1977, they developed an online traditional reactive TVEP‐BCI system based on TVEP. Fig. 3 shows that the user generates TVEP by looking at one of the four fixed points around the maze and checkerboard stimulation. The four vertices of the visual stimulation interface used by the BCI system were four flashing stimuli (corresponding to “up”, “down”, “left”, and “right” in four spatial directions). The user could generate TVEP signals using the corresponding directional characteristics by looking at the flashing stimuli in different directions to follow the direction of the cursor. The user must stepwise move the indicating arrow from the beginning of the chessboard maze to getting out of the maze.
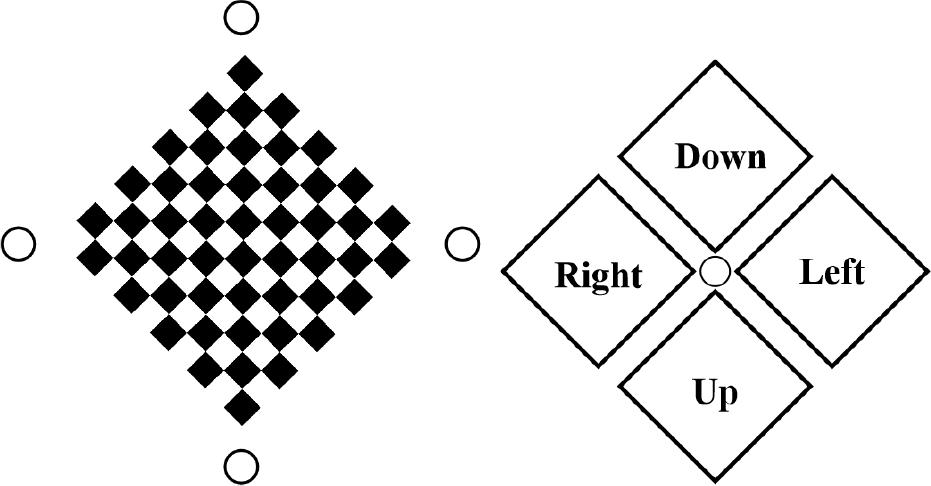
Stimulus target in the TVEP experiments. The target consists of a fixed diamond‐shaped red checkerboard illuminated with a xenon flash to provide visual stimulation.
In the present study, the original EEG signals are first filtered and denoized, and they are then classified using a pattern‐recognition algorithm. The accuracy of the system target recognition reaches 80%–90%, and real‐time control of the BCI system is realized. This study proves the possibility of using brain electrical signals to control peripherals for the first time.
2.3 SSVEP
SSVEP exhibits significant periodicity and is not easily disturbed by facial expression, blinking, and other movements. In 1989, Regan et al. first proposed the experimental paradigm of using SSVEP as a closed‐loop feedback‐control BCI system [34].
Dechwechprasit et al. studied the time–frequency coherent response of SSVEP red–green‐scintillation stimulation paradigm to EEG signals [35]. They found that in the monochromatic‐contrast experiment, green light had higher accuracy than red light with average accuracies of 59% and 41%, respectively. In the alternating‐scintillation experiment under the stimulation of two lights, the accuracy of red light was higher than that of the green light, and the average accuracies of the red and green lights were 62% and 38%, respectively.
The teams of Shangkai Gao and Xiaorong Gao from Tsinghua University have made considerable achievements. They implemented a BCI cursor‐control system based on SSVEP in 1999 [36]. The system was designed to help patients with severe limb paralysis control a cursor. Then, they developed a set of BCI telephone‐dialing system in 2002, and the information‐transmission rate reached 27.15 bits/min [37]. The SSVEP‐inducing platform of the experimental paradigm of the system was realized using virtual keys that flashed at different frequencies on the display. The signal processing scheme was a spectrum analysis based on fast Fourier transform. By comparing the spectrum peak of the SSVEP signal online, the flashing block watched by the subject could be identified to realize the brain‐idea selection button. Since then, they have designed a series of SSVEP‐BCI systems with a high transmission rate.
2.4 Improved SSVEP paradigm
The SSVEP paradigm has achieved reliable results in some fields. However, new application scenarios require more enhanced powerful performance of the experimental paradigm. Some new experimental paradigms (such as phase‐coded SSVEP, motion SSVEP, and hybrid SSVEP) have been successively proposed to optimize the user experience, expand the instruction set, and improve the information‐transmission rates.
2.4.1 Phase‐coded SSVEP
Phase‐coded SSVEP is an EEG coding scheme that uses the “phase‐locked” feature of SSVEP. In most SSVEP‐BCI systems, spectrum features are usually used for classification and recognition. However, phase features are rarely considered. In the SSVEP‐BCI system based on frequency coding, the flicker frequency of a target is different. Sufficient spacing between two different frequencies must be maintained to ensure a sufficiently high classification accuracy; thus, the number of flicker stimulation is limited. Phase‐coding SSVEP allows multiple same frequency stimuli to have different phase values; thus, the EEG signals corresponding to each stimulus have different phase characteristics. This coding scheme significantly expands the number of instruction sets of SSVEP by combining frequency and phase‐coding. Simultaneously, it can also improve the difference in the EEG signals with different stimuli and the accuracy of classification. In 2007, Manfred et al. proposed SSVEP‐BCI based on phase‐coding strategy, which proved that using a phase‐coding strategy could significantly improve the performance of SSVEP‐based BCI [38]. In 2008, researchers of Tsinghua University used the phase‐coding strategy to achieve 86.7% classification accuracy, which proved the practicability of phase‐coding in SSVEP‐BCI [39].
In addition, the combination of the phase‐ and frequency coding strategies and the development of matching‐classification algorithm can effectively improve the number of classifications and achieve high information‐transfer rate (ITR). In 2014, Nakanishi M et al. [40] developed SSVEP‐BCI using mixed frequency and phase‐coding. The team developed a speller that consisted of 32 flashes encoded in eight frequencies (8–15 Hz, 1‐Hz interval) and four phases (0°, 90°, 180°, and 270°). In that study, they also proposed a multichannel method that combined CCA and SSVEP training data for target recognition. In the final online experiment, 13 subjects achieved a spelling rate of 40 characters per minute and average ITR of 166.91 bits/min. The results of their study demonstrated that BCI based on high‐speed SSVEP shows great potential for practical applications.
2.4.2 Motion SSVEP
Traditional SSVEP‐BCI usually requires the subjects to focus on fixed flicker stimuli for a long time, which usually causes serious visual fatigue. The motion SSVEP experimental paradigm was introduced to solve this problem. In 2012, Xie et al. [40] developed a BCI system based on steady‐state motion VEP (SSMVEP). The offline accuracy and ITR (mean ± standard deviation) of six healthy people were 86.56% ± 9.63% and 15.93 ± 3.83 bits/min, respectively. The experimental paradigm used the periodic oscillation of contraction and expansion of a Newton ring to induce the EEG characteristic signals of SSVEP. In that study, they utilized a special visual stimulation protocol called motion reversal to present a novel SSMVEP‐BCI paradigm that relied on human perception of motions that oscillated in two opposite directions. Four Newton rings with oscillating expansion and contraction motions served as visual stimulators to elicit SSMVEP from the subjects. During the movement of the Newton ring, its brightness and contrast remained unchanged, which featured the characteristics of low stimulation intensity and less fatigue to the subjects. This paradigm could enhance the activation of characteristic EEG, help subjects concentrate, and minimize identification difficulties. In practical application, the Newton ring stimulation paradigm was integrated with environmental information and jointly applied to navigation technology, which significantly improved the navigation efficiency. This paradigm also achieved good results in EEG navigation control of wheelchairs for disabled people. In conclusion, these results suggested that the proposed paradigm could provide comparable performance with low‐adaptation characteristic and lesser visual discomfort for BCI applications.
2.4.3 Hybrid SSVEP
The hybrid BCI system has attracted extensive attention of scholars to expand the instruction set. Because of the nonstationarity and low SNR of EEG signals, the performance and reliability of a single type of BCI system are limited. By combining two different BCI experimental paradigms, the hybrid BCI system can activate more cognitive brain regions and improve the performance of the BCI system. As a special type of BCI, hybrid BCI combines various experimental paradigms and interaction modes and demonstrates good system reliability, robustness, and performance.
The first typical hybrid BCI is the combination of SSVEP and ERP. ERP‐BCI possesses the characteristics of high time resolution. The incubation period is usually hundreds of milliseconds, and it does not require long‐term training. However, it suffers from some problems. For example, clearly detecting the ERP components in a single event is difficult. At the same time, ERP‐BCI is mainly presented in the form of flashing characters. When too many words are displayed and are closely arranged, the subjects become prone to observation errors. The combination of SSVEP and ERP can effectively remedy this problem and simultaneously improve the number of classifications. In 2011, Panicker et al. proposed a spelling system based on SSVEP and P300. In this system, when no SSVEP activity was detected, the BCI based on P300 did not output any target characters and only presented a “=“ character as feedback to prompt a state of “no control”. The asynchronous spelling function of BCI was effectively realized using SSVEP as a switch to detect the state of the subjects, and the error rate of ERP‐BCI was reduced [41]. In online experiments, the system was shown to successfully transport data at an average rate of 19.05 bits/min with an approximate detection accuracy of 88%.
Another typical hybrid BCI is the combination of SSVEP and MI. MI‐BCI identifies the intention of a subject by imagining the characteristic EEG of a certain action (such as left‐ and right‐hand movements). Although the imagined BCI exercise is more intuitive and does not require external stimulation, compared with SSVEP‐BCI, the classification accuracy is low, the subjects must be trained in advance, and large differences exist among subjects. In 2011, Horki et al. [42] developed a set of hybrid BCI between SSVEP and MI in which MI controlled the grasping function and SSVEP controlled the elbow function of a two‐degree‐of‐freedom artificial upper limb. In their experiments, the MI task achieved an average accuracy of 87%, and the SSVEP task achieved an average accuracy of 91%. This paradigm effectively improved the classification number of BCI and reduced the error rate of the system. In 2019, Chen et al. [43] proposed a hybrid paradigm based on SSVEP and MI. The combination of SSVEP and MI‐BCI more clearly distinguished the EEG signals of different movements in the upper hand and forearm of the ipsilateral limb. In their experiments, the average classification accuracy of the hybrid condition reached 76.39% with a maximum value of 88.34%.
2.5 Problems in experimental paradigm
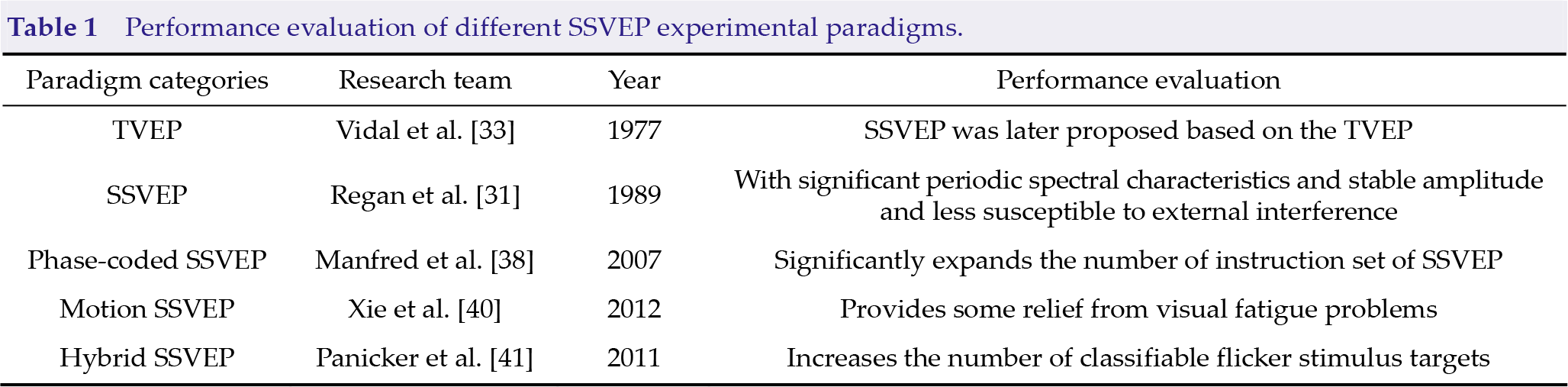
During the development of SSVEP‐BCI from the traditional SSVEP paradigm to various improved SSVEP paradigms, the limitations of the traditional SSVEP paradigm have been remarkably minimized, and the SSVEP‐BCI performance has significantly improved. The performance evaluation of the different experimental SSVEP paradigms is listed in Table 1. However, we must note that two main reasons exist why the equipment (brain‐controlled exoskeleton and brain‐controlled typing) based on SSVEP‐BCI was not publicly applied.
Performance evaluation of different SSVEP experimental paradigms.
2.5.1 Flicker stimulation easily causes visual fatigue in users
The SSVEP‐BCI system has high requirements for scintillation stimulus, which poses a challenge to the implementation of the SSVEP‐BCI system. The response curve of the SSVEP amplitude with frequency can be roughly divided into three regions: low‐frequency (4–15 Hz), medium frequency (15–30 Hz), and high‐frequency (30–60 Hz) regions. An unstable frequency cannot induce a stable SSVEP signal, which can seriously affect the accuracy of signal recognition. Therefore, a stable stimulation frequency is necessary.
The traditional SSVEP experimental paradigm mostly requires character flicker and graphic‐inversion stimulation. Users must focus on the flicker stimulation while operating the BCI system. Passively receiving strong light stimulation can very easily cause visual fatigue. Therefore, the stimulus source that induces SSVEP signal should be user‐friendly and meet the comfort requirements of the subjects. A too‐high stimulation frequency or too‐high stimulation intensity can also easily lead to visual fatigue, affect visual health, and even induce an epileptic EEG activity.
2.5.2 Limited number of instruction set available for control
Different people have different SSVEP signal amplitudes and different sensitivity to the same frequency. Simultaneously, because of the existence of harmonic components, subjects try to avoid the condition where one stimulation frequency is an integral multiple of another stimulation frequency. Otherwise, recognition errors would result.
At the same time, because of the formation mechanism of SSVEP and human visual persistence, SSVEP‐BCI can only separate SSVEP signals with a corresponding scintillation frequency in the range of 5–30 Hz from induced EEG, and the quality effect of SSVEP induced by high‐frequency scintillation stimulation is very much lower than that in the medium frequency. Therefore, the stimulation frequency range that can satisfy the application requirements should be less than 5–30 Hz.
Certain deviation can occur in the peak frequency of the SSVEP response power spectrum of different users to the same scintillation stimulus because of individual differences. The frequency interval of the scintillation stimulation that induces SSVEP must be sufficiently large to ensure a high recognition rate. Because of the abovementioned reasons, the number of instruction sets available for actual control of an SSVEP‐BCI system is very limited.
3 Decoding algorithm for SSVEP
EEG classification algorithm is the core component of a BCI system. An efficient BCI system depends on the employed feature‐decoding algorithm. If the BCI system is regarded as a pattern‐recognition system, it aims to recognize specific brain patterns to achieve high accuracy intention decoding. At present, the commonly used classification algorithms in the field of BCI system based on SSVEP can be divided into the following categories: CCA classic, CCA improved, machine‐learning, and deep‐learning algorithms. These classification algorithms can be used for signal decoding in the BCI system. However, the best classification algorithm that matches the EEG signals according to different tasks remains a good choice because it can effectively improve the system performance.
3.1 CCA algorithm
CCA has been validated to be a more efficient detection technique for SSVEP recognition. Lin et al. first applied the CCA algorithm to a BCI system based on SSVEP in 2006 [44]. Fig. 4 shows the flowchart of CCA applied to a BCI system based on SSVEP. The CCA algorithm exploits the fact that the autocorrelation of muscle activity is weaker than that of brain activity. CCA is a statistical method for estimating the degree of correlation of two multivariate signals. The largest coefficient between the recorded EEG and reference signals is used to identify a flicking‐target stimulus. The reference signals comprise a series of sinusoidal‐like waveforms at the stimulation frequency and its harmonic frequencies. The CCA‐based frequency detection method has been widely used owing to its high efficiency, robustness, and high accuracy [45, 46]. In a previous study, a SSVEP‐BCI system that used the CCA‐based method achieved high ITRs (approximately 100 bits/min) [47]. CCA has been widely used to recognize flicking targets in SSVEP‐BCI systems owing to its efficiency and training‐free properties.
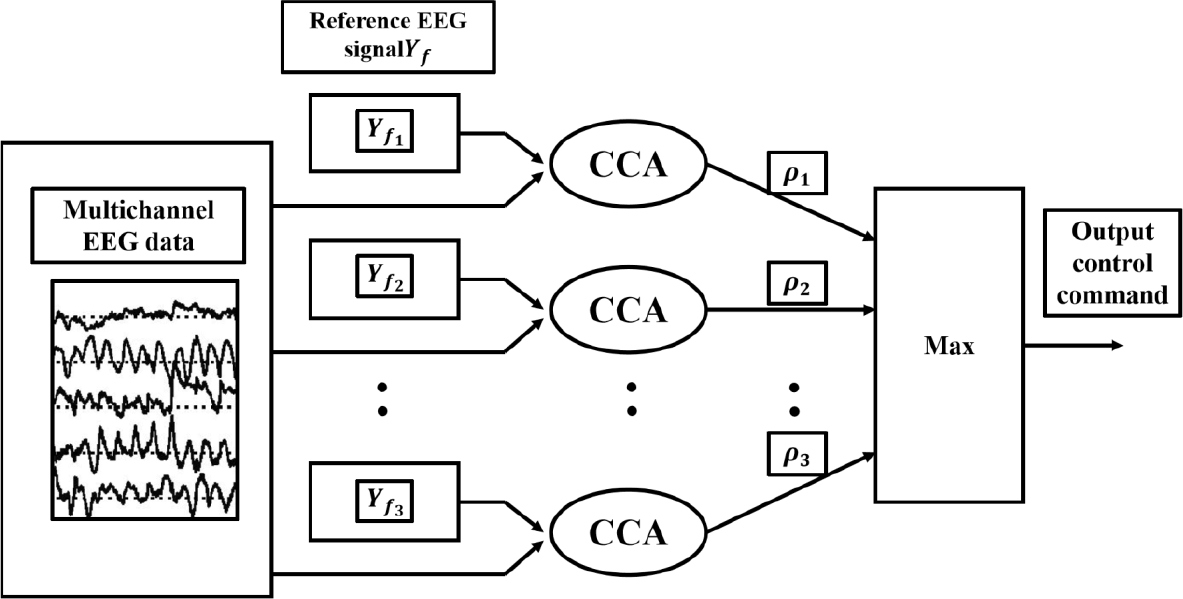
Flowchart of the CCA algorithm for EEG data classification
CCA analyzes SSVEP signals by calculating the typical correlation coefficients of two groups of signals. One group is recorded EEG signal
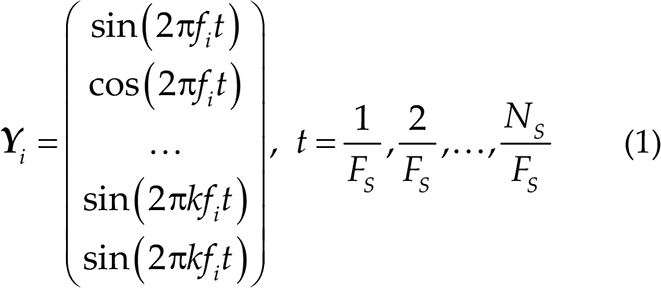
where i is the number of stimulation targets, F S is the stimulation frequency, k is the number of harmonics in the reference signal, and N S is the number of sampling points.
The linear combination of

and

where
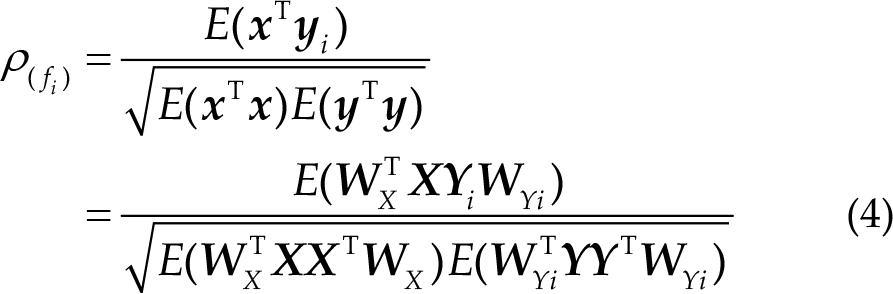
If K represents the number of stimulation frequencies, the final identified target frequency is

3.2 Improved CCA algorithm
Some problems are encountered in the performance of traditional CCA, such as subject differences and easy overfitting. To solve these problems, many scholars have proposed several improved algorithms in which the most typical is the filter bank CCA (FBCCA) algorithm. The FBCCA method was developed to improve the frequency detection of SSVEP‐based BCI systems. The FBCCA algorithm includes the following three procedures: (1) filter bank analysis, (2) CCA between SSVEP subband components and sinusoidal reference signals, and (3) target identification. In a recent study, an SSVEP‐based BCI system that used the FBCCA‐based method has achieved higher ITRs (approximately 151 bits/min) [48].
The typical correlation analysis method of a filter bank aims to improve the accuracy of frequency identification using the harmonic signal in an SSVEP signal. The basic idea of the FBCCA algorithm is that in the SSVEP potential, the amplitude of the fundamental frequency signal is often larger than that of the harmonic signal. In addition, the harmonic signal weakens with the increase in the number of harmonics, but the corresponding SNR only very slightly weakens, which indicates that the harmonic signal has strong identifiability relative to the surrounding noise signal. In a typical correlation analysis algorithm based on CCA filter bank, different filters are designed to fully extract useful frequency‐band information, maximize the correlation coefficient among the SSVEP signal, training‐set template, and preset reference signal, effectively improve the feature‐recognition accuracy of SSVEP, and verify the effectiveness of the algorithm through an online system [49].
3.3 Riemannian geometric classification algorithm
Riemannian geometry was discovered by German mathematician Georg Friedrich Bernhard Riemann, who wrote a paper on a hypothesis based on geometry in 1851 that clearly put forward the existence of another geometry. In EEG signal processing, the matrix is generally run under smooth constraints. Thus, the constrained space can be understood as a smooth curved space. The symmetric positive definite‐matrix space where the commonly used sample covariance matrix is located is a Riemannian manifold. The traditional linear discriminant analysis (LDA), CCA, and other methods use the sample covariance matrix in Euclidean space without considering the curvature of a symmetric positive definite‐matrix space, which is not conducive to accurate establishment of a model [50]. In Riemannian geometry, the Riemannian distance exhibits the invariance of inversion and congruence [51]. The algorithm based on Riemannian geometry features good generalization ability and robustness [52, 53]. Riemannian geometric classification algorithm has been applied to SSVEP‐BCI systems and is generally believed to offer great application prospects [54].
3.4 Machine‐learning algorithm
In addition to the previously mentioned algorithms, machine‐learning algorithms are widely used in the SSVEP‐BCI system. The commonly used classification algorithms in the SSVEP‐BCI system include the following categories: naive Bayesian model [55, 56], decision‐tree model [57 –59], support‐vector machine (SVM) [60 –63], k‐nearest neighbor (KNN) [64 –66], logistic regression [67 –70], and ensemble learning [71 –73]. The Bayesian model is based on Bayesian principle and uses the knowledge of probability and statistics to classify a sample data set. Because of its solid mathematical foundation, the misjudgment rate of the Bayesian classification algorithm is very low. SVM is a type of supervised learning, i.e. a generalized linear classifier, for binary classification of data. Its decision boundary for learning samples is represented by a maximum‐margin hyperplane. The idea of the KNN classification algorithm is that if most of the k most similar (i.e., the nearest) samples of a sample in the feature space belong to a certain category, the sample also belongs to this category. Logistic regression is a generalized linear model; thus, it possesses many similarities with the multiple linear‐regression analysis. Ensemble learning, which is sometimes called a multiclassifier system, completes a learning task by constructing and combining multiple learners. By combining multiple learners, ensemble learning can often achieve more significant generalization performance than a single learner.
In 2020, Rashid et al. [74] used common spatial pattern to extract the features of an SSVEP response and classified these features using SVM. The classification accuracy of the architecture reached up to 88.3%. The experimental results demonstrated that the architecture could be used for classification of an SSVEP‐BCI system and real‐time application of BCI. In 2017, Chatzilari et al. [75] proposed a brain electrolytic‐code algorithm that combined the multichannel CCA decoding and SVM algorithms. The SVM algorithm provided a confidence score, which allowed dynamic adjustment of the length of analysis data and accuracy of the classifier. Through this dynamic adjustment strategy, the algorithm could maximize the system ITR. In 2019, Acampora et al. [70] applied SVM to classify single‐channel SSVEP signals. They used an evolutionary‐algorithm‐based method to select an SVM model from the EEG signals of 11 volunteers, which improved the generalization performance of the SVM algorithm.
3.5 Deep‐learning algorithm
In recent years, deep‐learning algorithms have achieved rapid progress in many fields such as image classification, speech recognition, and recommendation system. Deep‐learning algorithms have also been applied in the field of SSVEP‐BCI system classification algorithm such as convolutional neural network (CNN) [76], recycle neural network [77], and long short‐term memory (LSTM) [78]. However, the deep‐learning algorithm has not shown significant advantages from a comprehensive view of these articles on SSVEP‐BCI, which may be due to the difficulty for scholars to obtain a large number of EEG data and the high SNR of EEG data. Similarly, the current classic deep‐learning networks are algorithms applied to the image and voice fields, and no deep‐learning network has been dedicated to EEG data classification.
3.6 Problems in classification algorithms
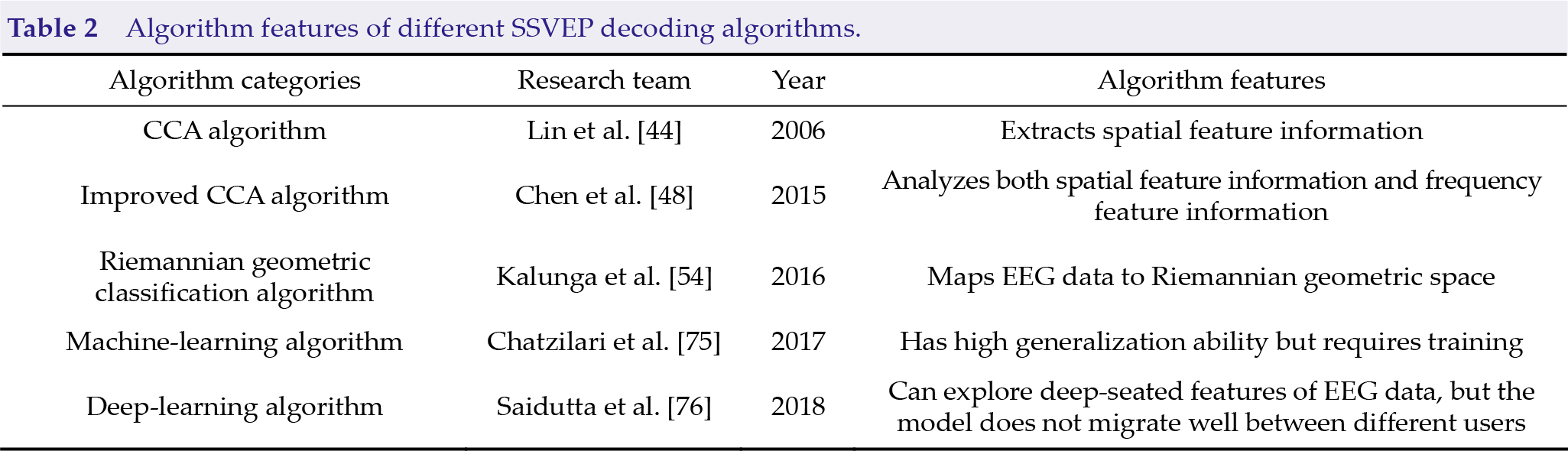
The research on decoding algorithms in the BCI field based on VEP has undergone many years of development. The defects and shortcomings of the original decoding algorithm have been greatly minimized, the system performance has significantly improved, and many extensions in application scenarios have been achieved. The innovation of the algorithms promotes the development and practicability of BCI. In recent years, BCI decoding algorithm has achieved great progress in overcoming the high variability and low SNR of EEG signals. The algorithm features of the different SSVEP decoding algorithms are listed in Table 2.
Algorithm features of different SSVEP decoding algorithms.
Developing a robust BCI decoding algorithm remains necessary to further solve the problems of large variability of EEG signals among individuals, few training samples, and low SNR to realize a universal, noncalibrated, and high‐performance BCI technology. At present, most studies on SSVEP‐BCI still use the CCA algorithm and its improved algorithms. The current CCA and its improved algorithms consider the spatial and frequency feature information but ignore the temporal feature information. The advantage of the EEG data lies in higher temporal resolution, which also contains a large amount of feature information in the temporal dimension. Therefore, in the future, SSVEP decoding algorithms that combine the temporal, spatial, and frequency dimensions can be developed, which are expected to significantly improve the decoding performance. In addition, the application potential of deep‐learning algorithms cannot be ignored. Because of its limitations, the deep‐learning algorithm has not been widely used in the BCI field. On the one hand, most of the existing deep‐learning algorithms that are applied to SSVEP decoding transform EEG signals into the frequency domain and input them into neural networks (e.g., CNN‐structured network structures) for training and finally obtaining classification results. The existing deep‐learning network structures are not good at processing EEG data. Therefore, the focus should be on developing neural network structures that are dedicated to EEG classification. On the other hand, because deep‐learning is a big‐data‐driven algorithm, obtaining a large data set for a single EEG experiment is often difficult. Research on deep‐learning algorithms should focus more on developing transferable models across subjects.
In the evaluation of SSVEP‐BCI decoding algorithms, the classification accuracy, response time, information‐transmission rate, and SNR are mainly used to evaluate the system performance. The aforementioned indexes fail to consider the needs of the actual tasks of a controlled system and cannot be used as the basis for effectively verifying and evaluating the overall performance of a system. Research on BCI evaluation methods from the perspective of “human (user)” and physiological evaluation based on interactive experience are lacking. Designing the evaluation criteria that can evaluate the user‐interaction experience and serve patients with movement disorders is a key problem that needs to be solved in the future.
The BCI decoding algorithm has achieved many breakthroughs and great progress in overcoming EEG signal variability and low SNR. At present, most studies on SSVEP‐BCI still use the CCA algorithm and its improved algorithms. Because of its limitations, deep‐learning algorithms have not been widely used in the BCI field. However, the application potential of the deep‐learning algorithm cannot be ignored. The innovation of the algorithm has promoted the development and practical process of BCI. At present, developing a robust BCI decoding algorithm is necessary to further solve the problems of large EEG signal variability, few training samples, and low SNR among individuals to realize a universal, calibration‐free, and high‐performance BCI technology.
4 Conclusion and prospect
Following the increase in SSVEP‐BCI related research, the experimental paradigm has been continuously updated, and the decoding algorithms are constantly improved, which enable disabled people to achieve mind control of external devices through BCI technology. In laboratories, disabled people can control robotic systems like normal people to perform daily life activities. The aim of the present study is to help patients improve their quality of life.
With regard to the experimental paradigm, two problems remain. On the one hand, flicker stimulation can easily cause visual fatigue to users. On the other hand, the number of instruction sets available for control is limited. Relevant researchers attempt to deal with the abovementioned problems by proposing various improved SSVEP experimental paradigms; however, they still have to go to great lengths to develop new experimental paradigms to completely solve these problems. Solving the abovementioned problems is the primary condition for wide application of the SSVEP‐BCI technology. With regard to decoding algorithms, neither the existing CCA nor the improved algorithms can achieve efficient decoding because of the significant nonlinearity, instability, and individual differences in EEG signals. In the future, more efficient SSVEP decoding algorithms will be developed using algorithms based on deep‐learning and Riemann space.
Overall, despite the great progress made in the SSVEP‐based BCI technology, it remains in the early stage of development. Most of the existing BCI systems are yet proof‐of‐principle under laboratory conditions and are not implemented yet for disabled people in their daily lives. Currently, many countries in the world have moved into an aging society. Many elderly patients cannot move part of their limbs; thus, their lives are very inconvenient. BCI technology based on SSVEP will provide disabled people with a method to directly control external devices without relying on their limbs. In the future, BCI technology based on SSVEP will achieve more long‐term progress and gradually become involve in the daily life of disabled people to play an important role in helping change their way of life.
Footnotes
Conflict of interests
All contributing authors report no conflict of interests in this work.
Funding
This work is supported by the National Natural Science Foundation of China (Grant Nos. U20A20191, 61727807, 82071912, 12104049), the Beijing Municipal Science & Technology Commission (Grant No. Z201100007720009), the Fundamental Research Funds for the Central Universities (Grant No. 2021CX11011), the China Postdoctoral Science Foundation (Grant No. 2020TQ0040), the National Key Research and Development Program of China (Grant No. 2020YFC2007305), the BIT Research and Innovation Promoting Project (Grant No. 2022YCXZ026) and the Ensan Foundation (Grant No. 2022026).
Authors’ contribution
Siyu Liu, Deyu Zhang, Mengzhen Liu, Ziyu Liu, and Zhiyuan Ming contributed to the conception and design of the work; Siyu Liu, Mengzhen Liu, and Ziyu Liu drafted the manuscript. All the authors contributed to revise it critically for important intellectual content and final approved the version to be published.