
Abstract
The emergence of flexible wearable electronics as a new platform for accurate, unobtrusive, user-friendly, and longitudinal sensing has opened new horizons for personalized assistive tools for monitoring human locomotion and physiological signals. Herein, we survey recent advances in methodologies and materials involved in unobtrusively sensing a medium to large range of applied pressures and motions, such as those encountered in large-scale body and limb movements or posture detection. We discuss three commonly used methodologies in human gait studies: inertial, optical, and angular sensors. Next, we survey the various kinds of electromechanical devices (piezoresistive, piezoelectric, capacitive, triboelectric, and transistive) that are incorporated into these sensor systems; define the key metrics used to quantitate, compare, and optimize the efficiency of these technologies; and highlight state-of-the-art examples. In the end, we provide the readers with guidelines and perspectives to address the current challenges of the field.
Introduction
The advancement of wearable sensors to noninvasively measure biopotentials and monitor body locomotion is critically valuable in quantifying human performance and improving off-site patient care. Quantitative evaluation of kinetic parameters of human gait and musculoskeletal functions can be employed in games and sports, as well as in the prevention and diagnosis of many diseases caused by aging, cardiopathies, neurodegenerative disorders, such as Parkinson’s and multiple sclerosis, and certain types of dementia.1,2
Wearable sensors, generally defined by small rigid units of wireless electronic components integrated into the body or a garment, are an assistive tool to differentiate between asymptomatic subjects and patients and, more importantly, to constantly monitor high-risk patients throughout their daily activities. Among different wearable techniques in gait analysis, three methodologies are the most common and prevalent in the market: inertial sensors, optical sensors, and angular sensors.
Inertial sensors are composed of one or a combination of two or more accelerometers, gyroscopes, and magnetometers. These sensors, as shown in Figure 1b , usually located within an inertial measurement unit (IMU), work based on both Newton’s inertia law, which says that all bodies resist changing their motion status, and Newton’s second law, which states that the net force acting on a body (measured by the sensors) is equal to mass times acceleration. Through multiple integrations from the generated signal, IMU can be applied to calculate 3D linear acceleration, angular velocity, flexion angle, and orientation with respect to the reference coordinate system. Generally, IMU devices are small rigid units placed below and above joints (knee, hip, elbow, toe, shoulder, neck, ankle) for applications such as tracking joint movement, 3 walking speed, 4 and rehabilitation. 5 IMU is the most accurate and precise method for clinical gait analysis. The drawbacks regarding this technique are its drift effect, electromagnetic noise disturbance for indoor measurements, and the rigidity of the sensor, which limits its application in daily life.2,6
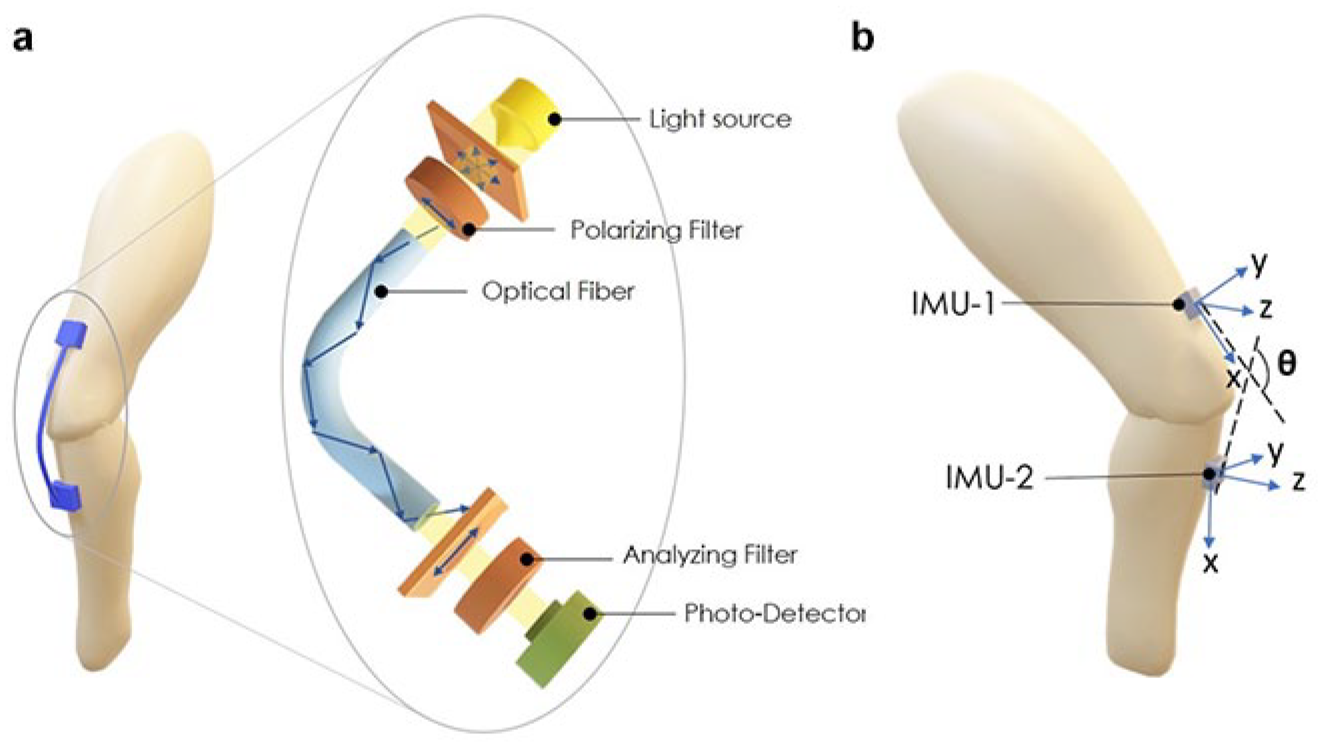
Schematic illustration of (
Optical fiber sensors (OFSs), as shown in Figure 1a , are developed based on the change in light transmittance and comprise three major components: a light source at the beginning to generate the light beam, an optical fiber in the middle as the traveling tunnel for the beam, and a photodetector to receive the intensity-attenuated light beam at the end. Through simple calculation on the light intensity attenuation, one can measure the bending angle of the optical fiber. The most important advantage of this technique, compared with IMU and other high-resolution systems, is its immunity to electromagnetic noises. However, OFS-based systems still suffer from low sensitivity, although some techniques, such as making “teethlike” imperfections on the surface of the optical fiber, have been applied to address this limitation. 7 Silica optical fibers and plastic or polymer optical fibers (POFs) are two major materials categories, the details of which can be found in the literature. 8 High signal linearity and stability under tension and flexure loading have been reported for a lightweight plastic OFS.9,10 Kuang et al. 11 have proposed an extrinsic-type sensor of POF for strain measurements, which is composed of two fibers placed in line with each other, one attached to the light source and the other to the photodetector. The movement of the free ends of these fibers relative to each other leads to the change in the light intensity detected at the end of the second fiber. Later, they introduced a lens ball into the previous structure, which leads to a sixfold increase in its strain sensitivity. 9
Angular sensors or goniometers are used for quantitative evaluation of the angular motion of the joints and, due to their simple mechanism, are one of the most commonly used sensors in joint motion surveillance. The functional principle of most goniometers is based on strain gauges, which are usually large and stiff devices that obviously cannot be adapted to joint motions.11–13 To address this issue, flexible goniometers were proposed by researchers. Lorussi et al. 14 developed a textile-based goniometer through screen-printing a conductive elastomer (CE; a mixture of graphite and silicon rubber) on fabric in both single- and double-layer structures that was capable of direct measurement of joint angles and almost overcame sensitivity to positioning of the sensor but still suffers from negligible relaxation time and nonlinearity. Using knitted piezoresistive fabric (KPF) as a sensor, De Rossi’s group developed the next textile-based goniometer. 15 The KPF-based goniometer, which was fabricated by knitting conductive yarns with nonconductive elastic yarns and embedded within a fabric band, showed errors of a few degrees compared with commercial electrogoniometers, and a reconstruction accuracy of less than 3° in comparison with IMU for an angular measurement of flexion/extension of the knee. A kinesthetic sensing glove embedded with three goniometers made of KPF in a double-layer configuration was also presented that was used to track patient hand posture in daily activities within ±3° compared with commercial goniometers. 16 Another solution to the rigidity and imprecision of commercial goniometers is optical fiber goniometer systems, which are composed of a single-mode optical fiber whose rotation induces changes in polarization, leading to intensity modulation of the light beam. 17
Although the aforementioned three categories in gait analysis enjoy high precision and popularity in clinical applications, the rigidity of at least one or two major sensing elements in these devices limits their application from both a comfort perspective and a sensing one. Despite all the efforts, they are still constrained to be used in clinical or laboratory settings, under the supervision of specially trained personnel, thus imposing a significant socioeconomic barrier to their widespread adoption and long-term use. Therefore, developing an unobtrusive, comfortable, rugged, and accurate real-time health monitoring system for remote human motion monitoring remains a problem of great interest.
Meanwhile, wearable electromechanical sensors or deformation sensors have several advantages compared with solid-state sensors: the ability to sense the stimuli at its origin where the signal is strongest, negligible weight, tailor-ability to regular daily garments, and comfortability, to name but a few. Recently, excellent overviews on the advanced developments in flexible wearable sensors have been published by pioneers of this field, such as John Rogers 18 and Zhenan Bao. 19 These articles provide in-depth views from varying perspectives, including materials development, transduction mechanisms, and fabrication technologies.20–23 However, at present, the literature reviews, and the corresponding technologies that they highlight, are restricted to small-scale pressures and motions, such as those of a subtle touch, venous pulses, and phonation vibration, while less focus has been placed on the design ideas and challenges involved in developing sensors for medium to large motions and pressures, such as those encountered during locomotion, sleep, and intense activity.
In fact, all the mechanical stimulations produced by human body movements can be divided into two major groups of pressure and tensile forces, for sensing of which electromechanical sensors (pressure and strain sensors, respectively) are designed to transduce imposed forces into electrical signals through different mechanisms: piezoresistive, piezoelectric, capacitive, triboelectric, and transistive ( Fig. 2 ). In this article, first, we introduce key metrics used to quantitate, compare, and optimize the efficiency and performance of the sensors compared with their peers. Then, the basic working principle in each mechanism is discussed and the design ideas of the state-of-the-art sensors within each category are uncovered thoroughly. In the end, current challenges and future opportunities in this field of research are discussed.
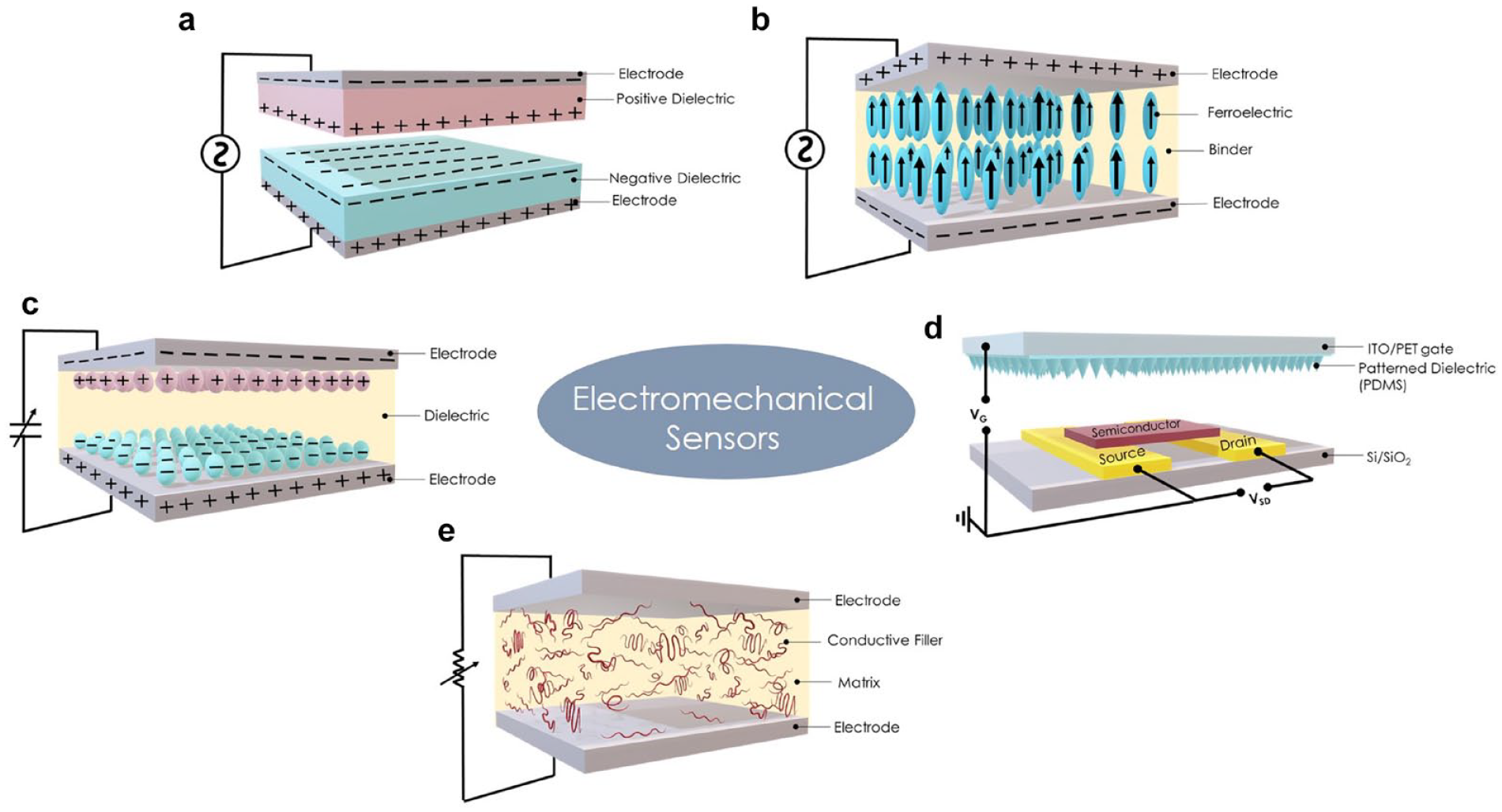
Schematic illustration of electromechanical sensors: (a) triboelectric, (b) piezoelectric, (c) capacitive, (d) transistive, and (e) piezoresistive.
Key Parameters
Sensitivity (S) is a measure of the accuracy and efficiency of the sensor and is defined by S = dX/dP, the rate of change (S) in the output signal (X) with respect to the imposed stress (P) (tensile or compression). Usually, for strain sensors, the term gauge factor (GF) is used as a measure of sensitivity, which is defined as GF = ΔR/R0ε, where ∆R is referred to as resistance variation, which means the difference between R as the resistance value under deformation and R0 as the initial value, and ε is the applied strain. The range of GF varies between 2 and >100 depending on the sensor structure and materials.
Stretchability (E) is a prominent factor in wearable sensors and is defined by the elastic modulus (Young’s modulus) of the sensor in the tensile test, which is defined by E = dσ/dε in the linear region of the curve, where σ is the applied stress and ε is the corresponding strain. Since the sensors are considered stable only in their linear region, usually stretchability is reported simply by the maximum strain the sensor can tolerate without failure in function; which is what we do in this review paper. Typically, highly stretchable strain sensors enjoy very low sensitivity (low GF) and show a very nonlinear behavior. Thus, developing a strain sensor with high sensitivity and high stretchability that can detect both small (ε < 1%) and high (ε > 50%) strains is of great importance. 24 Incorporation of low-aspect-ratio nanomaterials (such as carbon black [CB] and nanoparticles [NPs]) usually leads to low stretchability of the composite. For skin-mounted strain sensors, if the elastic modulus of the sensor is close to that of the skin epidermal layer, that would lead to a stronger sense of comfort for the subjects.
Range of detection (RoD) is the range between the lowest and the highest amount of stress that can be distinguished by the sensor. In the literature, it is common to use the limit of detection (LoD), which deals with the smallest amount of stress being distinguished. 25 However, since in human activity tracking the largest amount of distinguishable stress before saturation is also a matter of importance, we prefer to define the RoD. In this review, we are dealing with a sensor with a RoD from 10 Pa to >100 kPa with at least 15% stretchability.
Response time is the time required for a sensor to build up a stable, distinguishable output signal under the application of an external stimulus. Obviously, the shorter the response time, the more acceptable the sensor, specifically when it comes to dynamic real-time monitoring of human activities. Due to the viscoelastic property, polymer-based sensors exhibit longer response times than other materials. 24
Linearity is defined by the percentage of deviation of the output signal from the straight regression line and is a measure of the stability of the signal over an application range.
Power consumption, which is directly related to the operating voltage, plays an important role in designing a sensor. Having a sensor with low power consumption is a tremendous advantage for its applicability in mobile and hard-to-access devices, specifically in locomotion surveillance.
Transduction Mechanisms and Design Ideas
Generally, all the mechanoelectrical sensors follow the same structure as there is an active material whose electrical property (such as resistance in piezoresistive ones or polarization in piezoelectric ones) changes with applied deformation and two electrodes that collect the change in the charge distribution produced by the active material. For flexible sensors, it is quite common to use a flexible substrate to impart mechanical stability to the active material. Polydimethylsiloxane (PDMS), Ecoflex, poly(ethylene terephthalate) (PET), polyurethane (PU), and poly(ethylene naphthalate) (PEN) are some of the most commonly reported flexible substrates in wearable sensors. Tables 1 – 5 reveal a comparative summary of all the sensors and their corresponding performance parameters and applications mentioned in each mechanism. Herein, we explain the working principles of each mechanism, common active materials and electrodes, distinguishing features, and other pros and cons in each category.
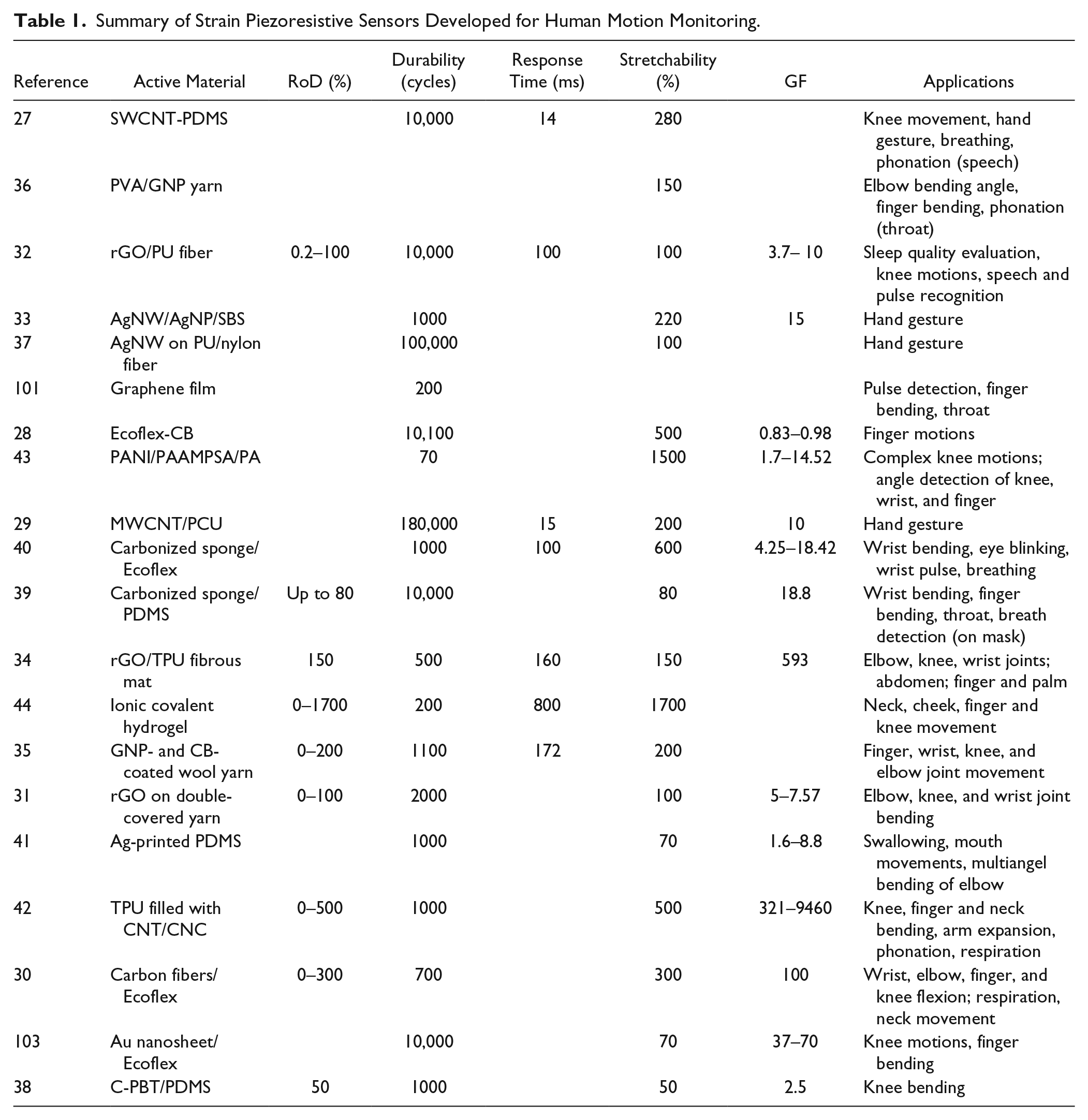
Summary of Strain Piezoresistive Sensors Developed for Human Motion Monitoring.
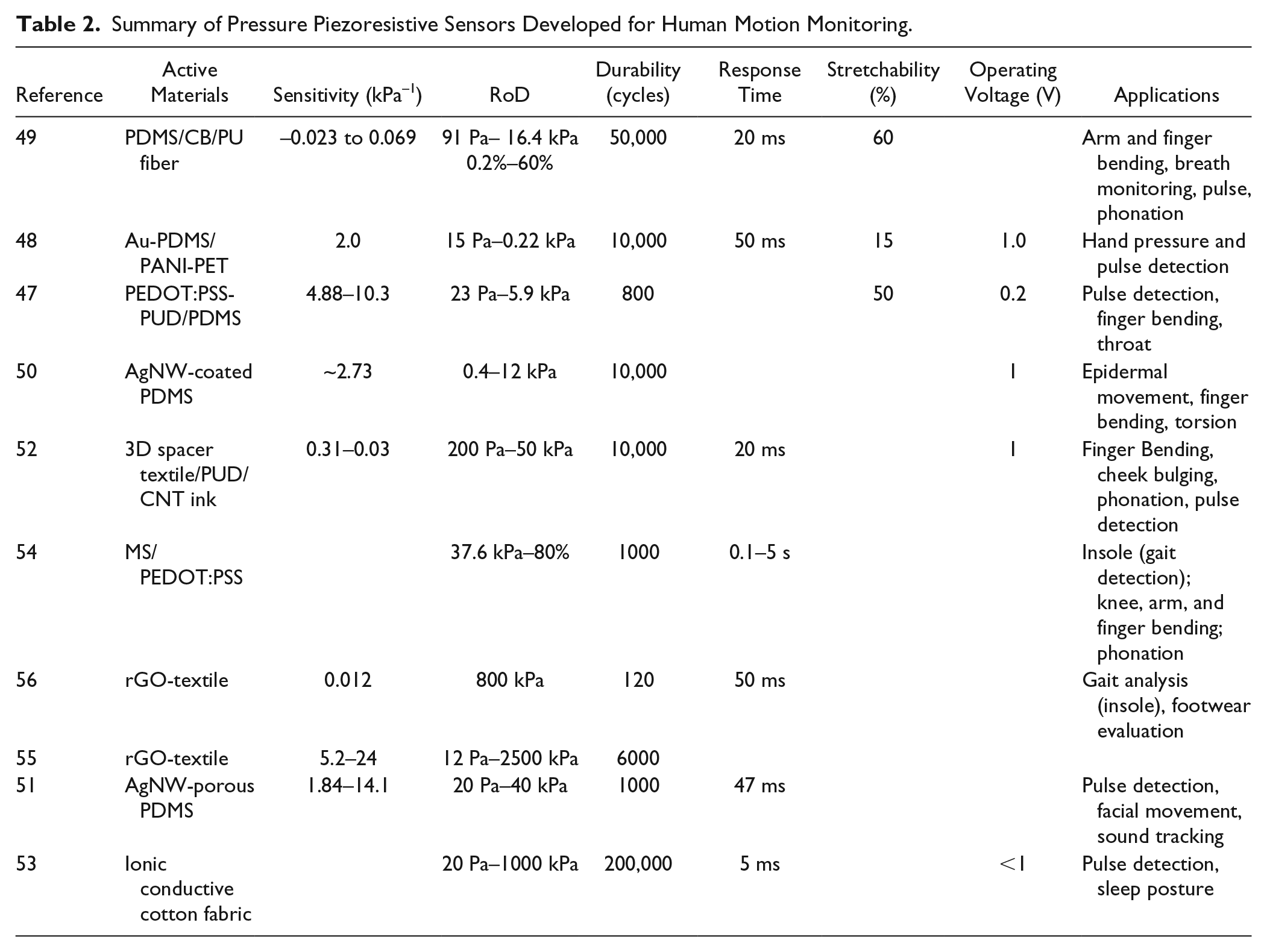
Summary of Pressure Piezoresistive Sensors Developed for Human Motion Monitoring.
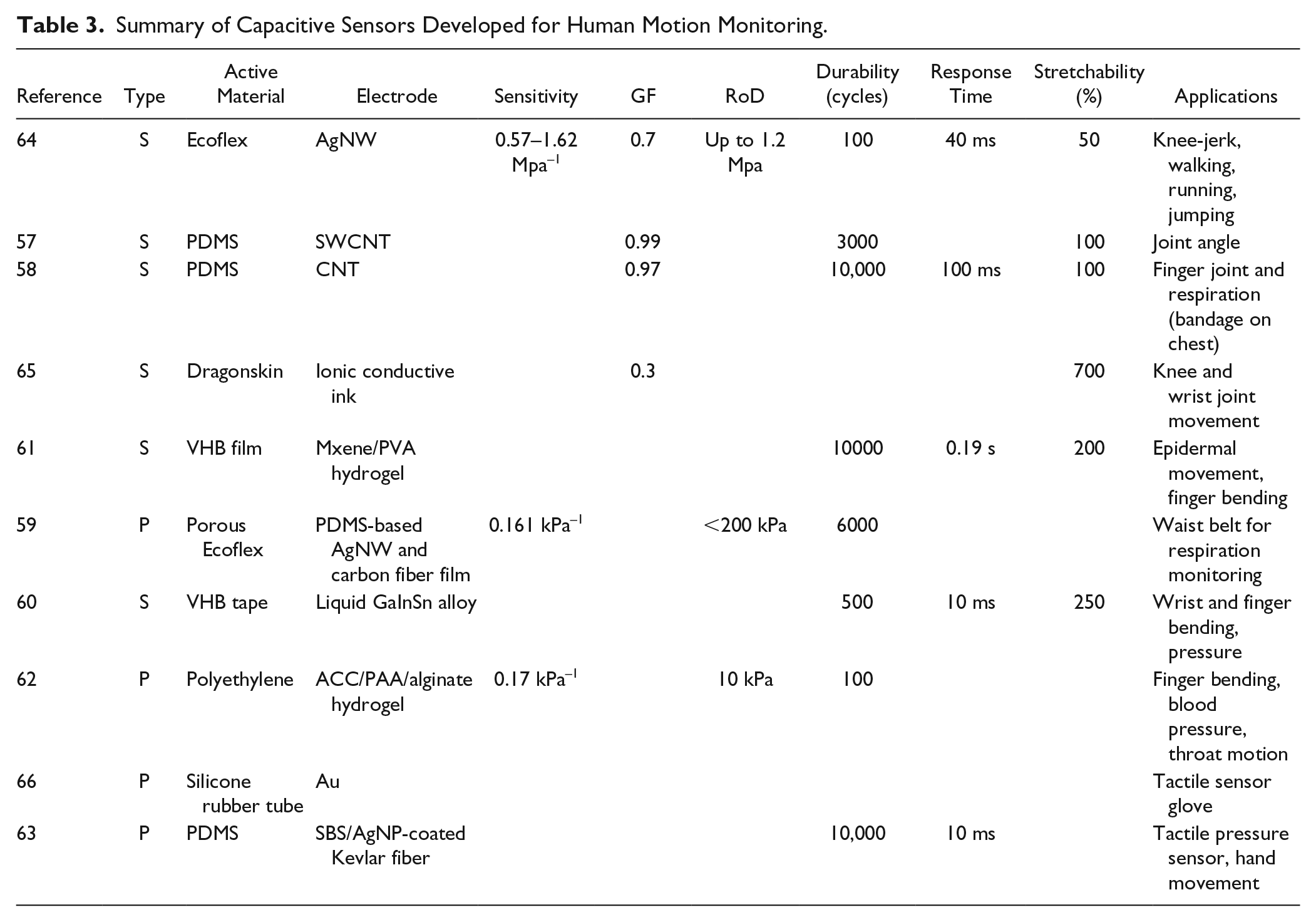
Summary of Capacitive Sensors Developed for Human Motion Monitoring.
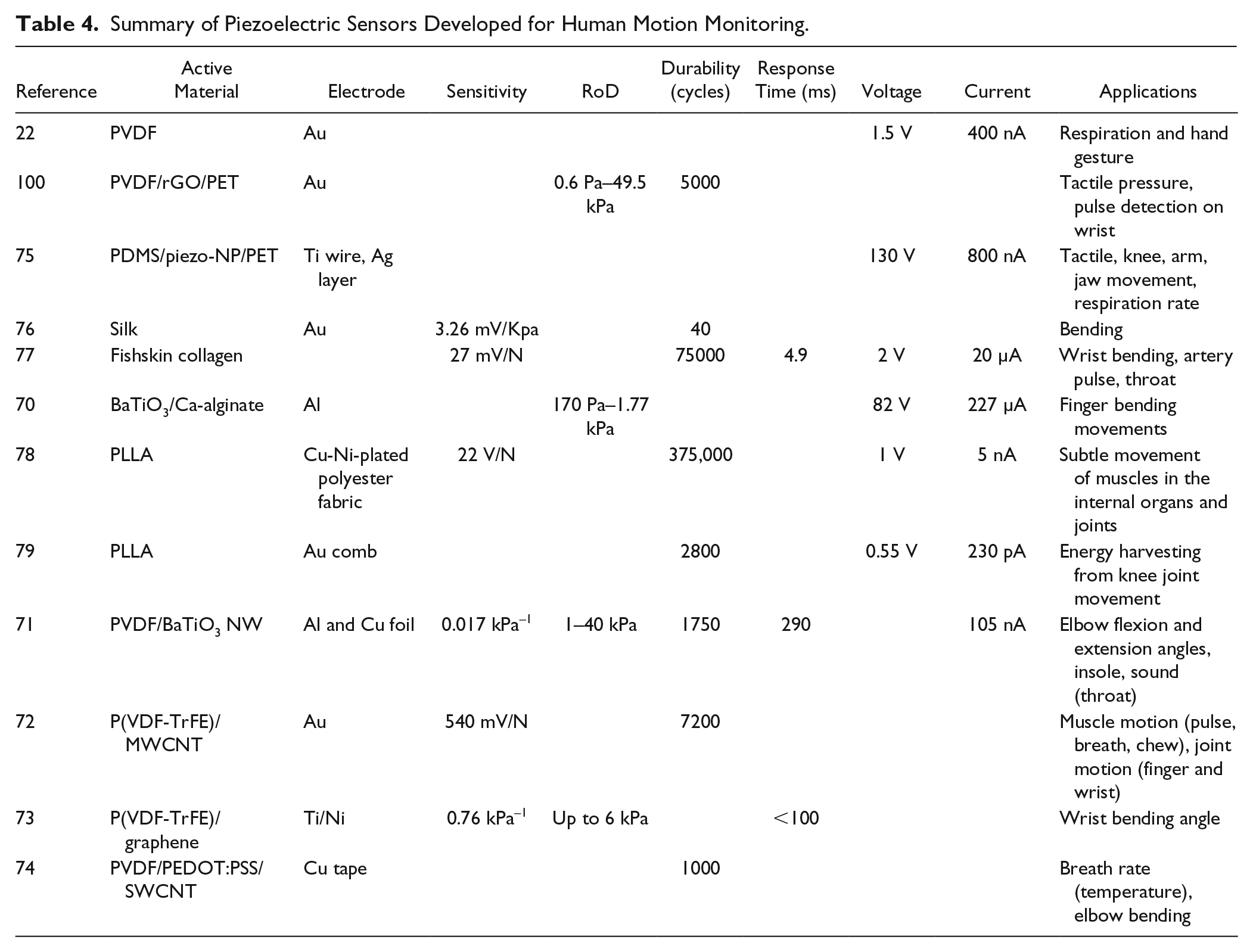
Summary of Piezoelectric Sensors Developed for Human Motion Monitoring.
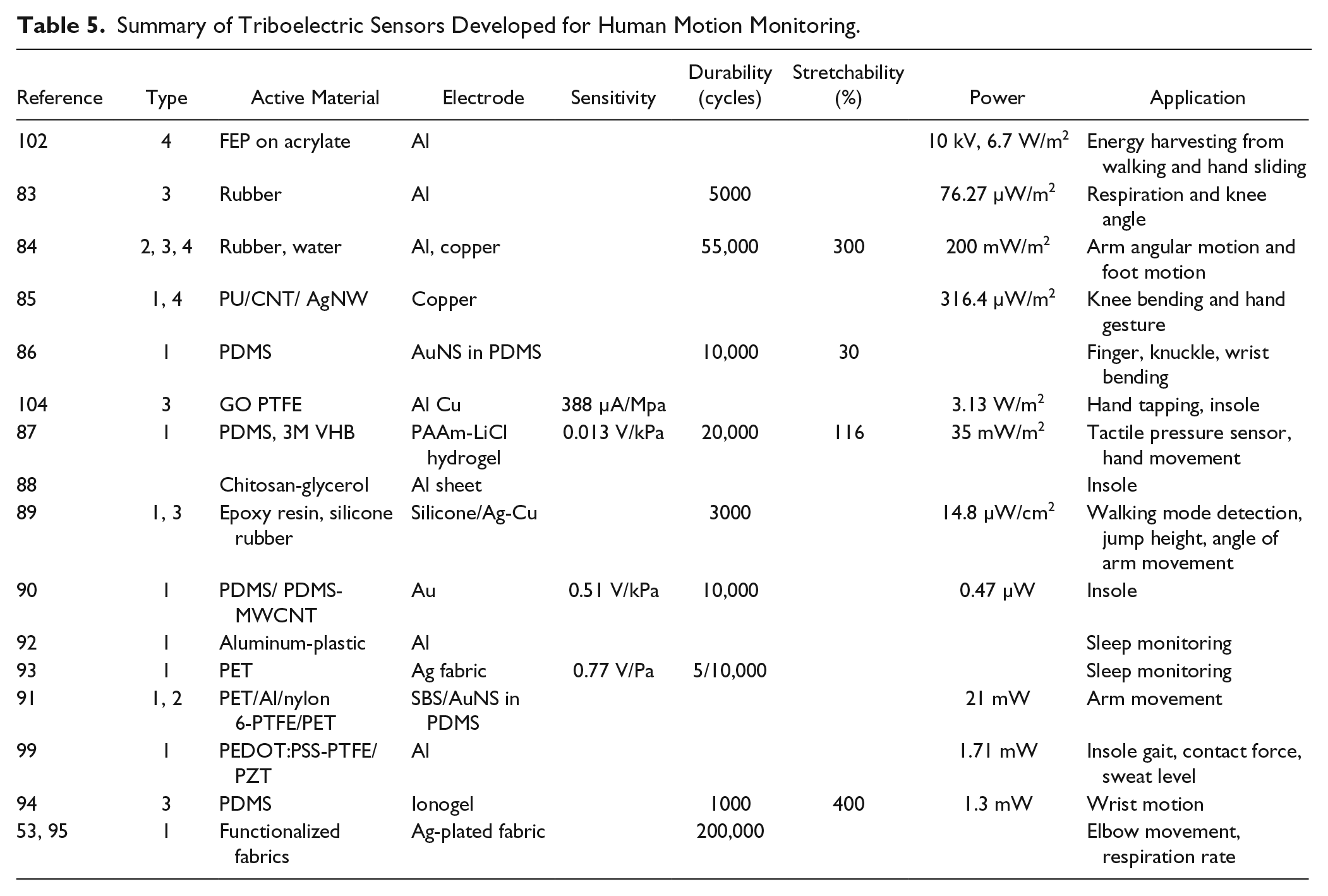
Summary of Triboelectric Sensors Developed for Human Motion Monitoring.
Piezoresistive Sensors
Piezoresistivity is among the most widely used transduction mechanisms that transform the mechanical deformations caused by applied pressure or strain to electrical resistance variations. The working principle of this type of sensor is straightforward and is based on the well-known equation of resistance:
where ρ is the electrical resistivity, l is the length, and A is the cross-sectional area of the medium. When a piezoresistive sensor is subjected to stress, depending on the design of the sensor, any of those three quantities or all of them may change under deformation, which leads to resistance variation. Based on the type of applied stress, either compression or tensile, usually they are divided into two main categories, pressure and strain sensors, respectively.
Piezoresistive Strain Sensors
Piezoresistive strain sensors are the most prevalent type of sensors between mechanoelectrical sensors, and many researchers have already given a valuable overview of this topic.20,24,26 A conventional and still popular method of fabricating piezoresistive sensors is using the composition of a stretchable rubber with conductive materials (such as carbon nanotubes [CNTs], graphene, silver nanowires [AgNWs], and intrinsically conductive polymers [ICPs]).27–30 Under tensile stress, conductive pathways available inside the material will change direction because of the decreased percolation routes caused by disconnections and the change in the compatibility between the conductive materials and the matrix. Based on this explanation, different transduction mechanisms have been suggested in the literature, such as structure geometry variation, change in the resistivity of the conductive materials (intrinsic piezoresistive effect), a tunneling effect after initial separation between conductive elements, and microcrack propagation, the details of which can be found in other references20,24 and are out of the scope of this article.
Using commercial stretchy fibers and coating them with ICPs or conductive inks, and spinning a conductive composition into flexible fibers are other two methodologies used to fabricate strain sensors. Mount-on-skin reduced graphene oxide (rGO)-based stretchy fibers with compression springlike structures were successfully applied for bending and torsion types of movement.31,32 In another fiber-based sensor, a wet-spun fiber composed of AgNWs, silver NPs, and poly(styrene-block-butadiene-block-styrene) (SBS) was developed and mounted on a glove to detect hand gestures. 33 A super high GF (593) was reported at 150% strain through a 3D conductive fibrous network composed of an rGO-coated aligned electrospun thermoplastic polyurethane (TPU) fibrous mat located in direct contact with the skin. 34 Natural yarn, such as wool yarn, has also been implemented as a strain sensor when coated with a mixture of graphene nanoplates (GNPs) and CB. 35
Moreover, it is highly important to develop wearable sensors capable of being directly sewn into daily garments rather than being directly mounted on the skin. Thus, many fabric/fiber-based sensors have been suggested by researchers to address this need. Park et al. 36 proposed a stretchable yarn-based strain sensor made through a layer-by-layer assembly of dip-coating into polyvinyl alcohol (PVA) and GNPs. This yarn was then sewn into a garment and applied for body motion detection. Also, Ge et al. 37 fabricated a stretchable electronic fabric out of AgNW-coated commercial elastic thread and leveraged this fabric to quantify stresses induced by pressure, strain, and flexion. In another recent study, Sadeqi et al. 38 developed a washable highly sensitive thread-based sensor (carbon-coated polybutylene terephthalate [C-PBT] thread coated with PDMS) that can be integrated into any textile for motion detection.
Carbonized melamine sponge (CMS) infused with PDMS or Ecoflex is another structure used as a wearable strain sensor for human motion detection; it has a high GF (~18) but lower stretchability compared with its fiber-based counterparts.39,40 Moreover, flexible patterned metal/polymer composite films with reported GFs of 10–40 but lower stretchability (~70%), which are developed through nanoimprint lithography, are another candidate for the next generation of remote biomedical practice. 41 It is obvious that one of the most important challenges in designing a strain sensor is reaching to a high GF and stretchability at the same time. Zhu et al. 42 reported a super high GF (321) with a large workable strain range (>500%) by taking advantage of the superelasticity of porous TPU membranes and the high sensitivity of the suspension of CNT and cellulose nanocrystals (CNCs) pumped into the membranes as conductive fillers. 42
Developing an omnidirectional strain sensor with the ability to detect deformations not only in one axis but also in different angles and positions is necessary for sports monitoring and rehabilitation applications. Recently, Lu et al. 43 have demonstrated a new regenerative polymer with ultrahigh omnidirectional stretchability (1350%) and self-healing ability with high sensitivity (~14 at 1500%). This sensor includes an ICP, polyaniline (PANI), in addition to poly(2-acrylamido-2-methyl-1-propanesulfonic acid) (PAAMPSA) and phytic acid (PA), both of which play the role of dopant and crosslinking agent in the system. This sensor has been attached to human skin by adhesive medical tape in order to detect elbow, knee, wrist, and finger knuckle angular movement. Also, a strain sensor based on multifunctional and transparent ionic covalent hydrogel with excellent tensile property has been reported; it is highly stretchable (up to 1700%) but suffers from low durability (200 cycles) and a large response time (~800 ms). 44
Piezoresistive Pressure Sensors
Most of the piezoresistive pressure sensors developed by researchers so far are meant to function for electronic skin devices that need to surpass the subtle compression stresses (1 Pa–10 kPa).45,46 The common strategy to enhance tactile sensitivity in this type of sensors is to fabricate patterned microstructures such as pyramids, micropillars, or interlocking hemispheres on the surface, which leads to changes in contact resistance upon the application of varying pressure.45–48 However, in monitoring human activity, which is the scope of this paper, we deal with medium pressures (10–100 kPa), such as in pulse detection, and high pressures (>100 kPa), such as in large-scale body movements or posture detection. Thus, developing a sensor with the capability to detect a wide range of pressures is of great importance. In this regard, Wu et al. 49 have reported a sensing platform microcrack-designed CB in PU sponges that can detect subtle mechanical stimuli (91 Pa pressure, 0.2% strain) as well as large stimuli (16.4 kPa pressure, 60% strain), and thus can be leveraged for pulse detection and arm bending as well as other human–machine interface applications. Recently, Mao et al. 50 introduced two configurations for AgNW-coated PDMS pillar array sheets: interlocked connection structure, which is ultrasensitive to subtle pressure, and point-to-point connection structure, which needs larger pressures to be deformed, thus exhibiting a wider RoD (up to 12 kPa). This structure can be applied for different applications from epidermis movements to gentlye bending and torsions. Another sandwich structure of the AgNW-coated porous PDMS structure was also recently reported with a broad range of working pressure and the capability of adjusting the sensitivity by changing the pore size. 51
Considering textile-based piezoresistive pressure sensors, a textile sensor unit with a 3D spacer weft-knitted structure coated with CNT ink was developed with a wide range of sensing behavior (200 Pa–50 kPa). 52 By exerting pressure on the knitted 3D structure, it goes under deformation, which leads to an increase in the contact points and the number of fiber conductive connections, and therefore an increase in the electrical current. Recently, Andrew’s group 53 have introduced a sleek three-layer textile pressure sensor by sandwiching ionic conductive cotton, as the active material, between two silver-plated fabrics, as the electrodes. In this structure, the quaternary ammonium moieties and their corresponding chloride counterions play a crucial role in providing the fabric with ionic conductivity, the change of whose resistivity was monitored through applying compression strains. This sensor was sewn into a loosely fitting pajama and was successfully applied for sleep posture detection (pajama). Another architecture in this category of sensors is based on melamine sponges (MSs). For example MS dip-coated with PEDOT:PSS is another reported piezoresistive pressure sensor with a stable response at compressive strains up to 80%. 54 Fabrics coated with rGO are another structure that has been used by some researchers as a pressure sensor.55,56 The deformation induced by the applied pressure leads to a change in the intrinsic resistance of the graphene network in the fabric.
Capacitive Sensors
In general, capacitors, composed of a dielectric material sandwiched between two electrodes, store electrical energy through transforming it into an electrostatic field. Capacitance (C) is defined by the equation C = ε0εrA/d, where ε0 and εr are the electric constant and the relative static permittivity of the dielectric, respectively; d is the thickness of the dielectric, which is also equal to the distance between two electrodes; and A is the overlapped area of the two electrodes. In this equation, all the parameters except for ε0, which is always constant, can be changed under deformation induced by applying an external tensile or compression stress, which is the basic functionality of capacitive sensors. The change in capacitance induced by an externally imposed deformation usually exhibits excellent linearly but low sensitivity, specifically when it comes to dielectrics with a large Young’s modulus.
A typical structure for a capacitive sensor relies on the application of dielectric elastomers between two conductive layers. Under the application of uniaxial stress, Poisson contraction brings the two electrodes closer together, leading to a change in the capacitance of the structure.57,58 For such a structure, conventional materials used as electrodes lack stretchability, which limits the sensing range of the sensor. To address this issue, PDMS filled with AgNWs and other conductive fillers 59 and painted liquid metallic alloy such as GaInAs 60 have been suggested as stretchable electrodes for capacitive sensors used in health monitoring applications. Recently, a self-healing and highly stretchable (~1200%) electrode has been fabricated that is made of MXene (Ti3C2Tx)/PVA hydrogel. 61 In all these structures, a flexible dielectric layer such as porous Ecoflex 59 and VHB film60,61 has been incorporated as an active material. In another skinlike structure, a dielectric layer has been sandwiched between two hydrogel conductive layers, which leads to a stretchable capacitive sensor that is capable of sensing blood pressure and hand gestures. 62 Lee et al. 63 suggested a textile-based capacitive pressure sensor with high sensitivity that had Kevlar fibers coated with an SBS/Ag NP composite as the conductive core and the second PDMS coating on top of it as the dielectric layer. This sensor with very high durability (~10,000 cycles) has been sewn into garments and used as a tactile pressure sensor.
It is considerably valuable to develop a sensitive sensor that can detect both pressure and stretch stimuli. One of the reported multiple sensing capacitive sensors, composed of Ecoflex as the dielectric layer and screen-printed AgNWs as electrodes, is capable of detecting strain (up to 50%) and pressure (up to ~1.2 MPa), which makes it suitable for human motion detection such as strain in the knee patellar reflex, and walking or running. 64 To facilitate sewing of the sensor directly into garments, a capacitive multi-core-shell fiber was suggested in which Dragonskin as the dielectric and encapsulating layer and a nonvolatile ionic conductive ink as the electrodes were co-extruded through a custom-designed printhead. 65 This fiber exhibited high stretchability (700%) and GF ~0.3 with hysteresis-free performance and was directly sewn into tight-fitting clothing. Formerly, an artificial hollow fiber was reported made of a Au-coated silicone tube that was knitted into fabric and capable of being used as pressure sensor in garments. 66
Piezoelectric Sensors
Piezoelectricity is an intrinsic property of ferroelectric materials in which applying a tensile, compression, or bending force leads to a reorientation of the dipoles inside the medium, and subsequently generates an electrical charge on the crystal faces of the material proportional to the amount of applied mechanical stress. When we have a well-processed piezoelectric material, there is a predominant polarization orientation (Pz), presumably normal to the sensor plane, inside the material. Thus, corresponding charges will be induced at the faces of the electrodes to compensate this polarization. If the application of a transient compression or tensile stress leads to a change in the thickness and, subsequently, the dipole population inside the medium, then a current of electrical charges will be generated to compensate this produced imbalance. Obviously, that is explains the multimodal sensitivity and reversibility of the piezoelectric transduction mechanism.
Both inorganic piezoelectric materials, such as lead zirconate titanate (PZT), zinc oxide (ZnO), barium titanate (BaTiO3), aluminum nitride (AlN), lithium niobite (LiNbO3), and quartz, and organic ones, such as polyvinylidene fluoride (PVDF), poly(L-lactic acid) (PLLA), and poly(D-lactic acid) (PDLA), are biocompatible. However, piezoelectric polymers, due to their ease and lower cost of processing, are more favorable, although their piezoelectric output is not comparable to that their inorganic counterparts. 67
In wearable electromechanical systems, we deal with flexible materials, and in piezoelectric materials, the prototypical and most widely used ferroelectric polymer is PVDF. The compact linear molecular structure of this material gives it semicrystallinity and unique physical properties. In β-phase PVDF the hydrogen atoms and fluorine atoms stand on the opposite sides of each other in an all-trans conformation, which leads to the largest molecular dipole moment and thus the highest polarization among other polymorphs. Due to the difficulties in processing the β-phase PVDF, trifluoroethylene (TrFE) was introduced to VDF in a specific percentage to form the stable crystalline copolymer of P(VDF-TrFE). 68 Liu et al. 69 proposed a piezoelectric active sensor made of electrospun PVDF nanofibers, which are sandwiched between two deposited gold films as the top and bottom electrodes; then the whole structure is mounted on a silicon substrate for more stability. This sensor can detect respiratory signals through a chest belt and hand gestures through subtle muscle movement of the wrist, and record human sound when attached to the throat skin.
A wide range of reported piezoelectric sensors are based on polymeric composite active materials that have been developed to take advantage of both the flexibility of polymers and the higher piezoelectric output of the piezoelectric inorganics. For example, a flexible pressure sensor was fabricated from spherical composite beads composed of BaTiO3 NPs and calcium alginate polymer through the iontropic gelation technique. This sensor can sense pressures in the range of 170 Pa to 1.77 kPa and directional bending of the human body, such as finger flexion/extension movements, without any external power source. 70 Other composite structures such as electrospun PVDF/BaTiO3 nanowire nanocomposite fibers, 71 P(VDF-TrFE)/MWCNT (multiwall carbon nanotube) composites, 72 and P(VDF-TrFE)/graphene heterostructures 73 have been recently reported as active materials for use in piezoelectric sensors for human motion monitoring. A binary polymer composite was also suggested with a single-wall carbon nanotube (SWCNT)-filled PVDF/PEDOT:PSS composite blend with PDMS, used as the active material, and copper tape as the electrodes. The advantage of this structure is its linear and stable bending movement sensitivity over a wide range of temperatures (0–120 °C). 74
Since most of the piezoelectric sensors reported for monitoring human locomotion use planar device technology, they lack enough adaptability to detect the motion of different human body parts. Recently, Alluri et al. 75 developed a flexible piezoelectric hemispherical composite strip through the groove technique, which has been placed over multiple nonlinear surface locations of the body, such as the jaw, arm, knee, throat, and hand, to detect the movement or rotation of the respective joint.
In addition to all the synthesized organic and inorganic piezoelectric materials, silk is a natural, widely available, flexible, and bountiful candidate to be used in textile-based sensors. Due its highly oriented crystallinity, silk shows an innate piezoelectric property and is able to be applied in a variety of sensors and actuators. Patterning the silk film is a crucial step in developing silk-based sensors, which can be achieved through a lithographic approach or hard-mask-based technique. Joseph et al. 76 have reported a pressure sensor by using a silk piezoelectric thin film as the active material. This film can be formed on top of a metal-coated flexible substrate such as Au-coated silicone for further biomechanical applications. Another nature-inspired piezoelectric sensor is a pressure sensor made of fishskin, which possesses a high sensitivity and fast response time in addition to a high stability (75,000 cycles). 77 Fishskin is composed of collagen nanofibrils that have piezoelectric properties due to the hydrogen bonding in the polypeptide chains. PLLA is another biodegradable polymer from plant that shows piezoelectric properties along its shear direction (compared with PVDF with normal directionality). Electrospun PLLA polymer (β-crystalline form), composed of chiral molecules with its –C=O groups oriented in a helical conformation as its dipoles, generates a change in polarization when it is sheared through its side chain.78,79 Using this property, Zhu et al. 79 have fabricated ordered porous PLLA nanofibers on a comb electrode and mounted this structure on the knee to harvest energy from joint movement. In another work, PLLA nanofiber membrane is used as bio e-skin with superior operational stability over 375,000 cycles and a high sensitivity of 22 V/N to detect the subtle movement of internal muscles and joints, and corresponding physiological signals. 78
Triboelectric Sensors
In this mechanism, mechanical deformation leads to electricity through the triboelectric effect, which is contact electrification followed by electrostatic induction. When any two dissimilar materials are in contact, triboelectric charges are generated due to a charge transfer from the material with the lower surface electron affinity to the material with the higher one. Under the open-circuit-potential condition, the generated triboelectric potential can be read through the electrodes placed in direct contact with the active tribo-materials. Once the two electrodes are shortened, the electrons flow in the circuit to compensate the potential difference. In general, triboelectric nanogenerators (TENGs), inspired by the pioneering studies of Zhong Lin Wang,80,81 work based on four fundamental modes: 82
Vertical contact-separation mode. This mode is the conventional and ubiquitous type of TENG composed of two films with distinctively different surface electron affinities, one of which must be at least dielectric (insulative).
In-plane sliding mode. This mode has the same structure as the vertical one, but once the triboelectric charges are created in two films, lateral sliding of the films over each other leads to the development of a strong dipole parallel to the sliding direction, which is caused by the noncompensated charges in the displaced areas. This dipole can be sensed by the potential difference across the two electrodes. The in-plane sliding mode produces a higher output power compared with the vertical mode.
Single-electrode mode. This mode is designed to acquire triboelectric charges through a freely moving object; thus, it is composed of just one dielectric layer and one electrode that is attached to the ground (as the second electrode). While the electron transfer is negatively affected by the screening phenomenon and is not as efficient as in the previous two modes, one freely moving layer can be used in a wide range of applications.
Freestanding triboelectric layer mode. Again, we enjoy the freely moving triboelectric layer, but sliding on a pair of symmetric electrodes. This oscillation creates an asymmetric charge distribution in two electrodes, which leads to a local potential difference. The advantage of this mode compared with the single-electrode mode is the absence of the screening effect.
After PENG-based sensors, the emergence of TENG opened another bright horizon to the development of self-powered sensors for human motion detection. Fang et al. 83 developed a rubber-based TENG that can be applied for sensing respiration and joint movements without an external power source. In this sensor, an Al film with a nanoporous surface was placed over an acrylate substrate, on top of which the rubber was mounted and fixed from one end to the substrate beneath. The free end of the rubber stretched under the application of tensile stress, which resulted in its length/shape expansion and the generation of a potential difference between the Al film and the ground. A shape-adaptive TENG was also proposed by Fang et al., 84 which was a cylindrical rubber container filled with a conductive liquid such as sodium chloride solution or water. The proposed structure was tested under three different modes (single electrode, sliding, and freestanding) and was used as an armband to show the angular motion of the joint or as an insole to monitor foot motion.
As discussed before, a common mechanism for human health monitoring is mounting stretchable sensors directly on the skin or through tight-fitting garments. In this category, a stretchable TENG sensor was developed with a three-layer structure, two pieces of electrospun PU nanofibers coated with AgNWs and conductive CNT, serving as conductive electrodes, sandwiched between micropatterned PDMS. 85 This self-powered structure was mounted on the skin to detect knee motion and embedded in gloves to sense finger gestures or hand movements. To overcome the rigidity of the electrodes, a fully stretchable TENG with gold nanosheets (AuNSs) embedded into patterned PDMS was suggested. 86 Another skin-mountable tactile sensor was introduced by Pu et al., 87 which, for the first time, enabled both ultrahigh stretchability (1160%) and high transparency. This skinlike TENG had a sandwich-like architecture in which polyacrylamide (PAAm) hydrogel containing lithium chloride (LiCl), as an electrode, was sealed between two PDMS or VHB films as the negative electrification layer. Jao et al. 88 leveraged a nanostructured chitosan-glycerol film to develop a humidity-resistant TENG, which was used as an insole to harvest energy from human motion. Recently, an arched TENG has been designed and used as a motion sensor that works in a combination with single-electrode and contact-separation modes. 89 The flexible electrodes were fabricated as a mixture of silicone rubber and silver-plated copper powder and placed in contact with the tribo-layers, that is, silicone rubber and epoxy resin. This sensor was able to detect human jumping, walking, and stomping, and the angles corresponding to the movement of the arm, and is suggested to be used as a jump height sensor.
Since the TENG-based sensors typically saturate at pressures larger than 100 kPa, a large-scale TENG-based pressure sensor was proposed by Rasel et al. 90 that can detect pressure up to 450 kPa. This pressure sensor is made of a micropatterned PDMS and PDMS-MWCNT nanocomposite, and its application as an insole was demonstrated. The ability to differentiate between several types of input signals such as pressure and strain is a challenging burden for the current sensors. Choi et al. 91 have developed a stretchable multifunctional TENG that is capable of measuring strain, touch, and strain rates, which is triggered momentarily when the sensor is under mechanical stimuli. This sensor had a sliding friction mode for strain sensing (PET/Al/nylon 6 as one layer and PTFE/PET as the other) and a contact-separation mode for pressure sensing (between nylon 6 and PET). All the layers and the stretchable electrode (SBS/AuNS composite) were embedded in the PDMS substrate. In this design, they achieved a lower power consumption by using a sleeping microcontroller unit to minimize the standby power of the sensor.
As discussed before, leveraging wearable electronics to study long-term sleep behavior is of great importance. To address this issue, a self-powered triboelectric sensor was developed in which a cantilever spring leaf was sandwiched between a folded aluminum-plastic laminated film. 92 However, this structure lacks stretchability, and wearing a bulky metallic gadget may feel uncomfortable while sleeping. Recently, Lin et al. 93 have introduced a washable TENG array as a bedsheet for the real-time monitoring of sleep. This array is composed of wavy-structured PET films sandwiched between two fabric electrodes. One of the challenges in using current electrodes in wearable electronics is that their resistance rises significantly under the applied mechanical deformation, which leads to the instability of TENG sensors. To address this issue, Sun et al. 94 proposed using ionogel-based TENG, whose rate of resistance increase upon deformation is much slower than that of its elastic composite counterparts. This sensor enjoys high stretchability and transparency and has been applied as a skin-mounted sensor to detect wrist motion. Another advantage of this structure is that, contrary to its hydrogel counterpart, it has a wide temperature tolerance range (–20 to 100 °C).
All the TENG-based sensors discussed so far are either skin-mounted or embedded into tight-fitting garments to be able to detect human motion or physiological signals. Andrew’s group 95 have developed an all-fabric layered triboelectric sensor in which the tribo-charges were induced by folding and compression of the textile itself; therefore, it was suitable to be tailored in everyday loosely worn clothing. In this design, they functionalized the commercial cotton with silane moieties with the amine group as the positive layer, and with the fluoroalkyl group as the negative one. This device was able to continuously monitor the human joint state and sweat concentration level with a high signal-to-noise ratio.
Transistive Sensors
Integrating a flexible capacitive pressure sensor into organic field-effect transistors (OFETs) as the dielectric layer was carried out in Bao’s group 96 for the first time in 2010. This research used a variety of patterned PDMS microstructures as the dielectric layer for a rubrene single-crystal field-effect transistor to change the sensitivity of the pressure sensor and reach a higher sensitivity and ultrafast response (<< 1 s) time through its integration into OFET. However, this device was fabricated on a nonflexible Si wafer; thus, in 2014 this group developed a flexible pressure-sensitive OFET by integrating the structured PDMS with polyisoindigobithiophene-siloxane in a transistor that was capable of pulse wave measurement with very low power consumption (<1 mW). 97 In this category, Sun et al. 98 also developed a skin-mounted piezopotential-powered strain sensor by combining PENG P(VDF-TrFE) and a coplanar-gate graphene transistor and leveraged this structure to detect human wrist and finger motions.
Perspective: Challenges and Future Opportunities
Despite these aforementioned efforts, wearable sensors still require improvement before they can be practically adopted for long-term, continuous, and unobtrusive monitoring of human activities. First, knowing the material-dependent structure–property relationships that govern the transduction mechanism for each sensor, it is highly important to further improve the form factor, flexibility, robustness, and efficiency of the final device. For example, integrating piezoresistive materials into a garment in such a way that affords high GFs while also maintaining stretchability is a key challenge that has yet to be satisfactorily met. Reaching high linearity and achieving low hysteresis behavior in the output signal are two other important factors that need to be addressed with improved materials design and selection.
When dealing with human physiological signals and gait monitoring, the process of data acquisition, data transmission, and further data processing should not breach the confidentiality and privacy of the users. Thus, moving toward self-monitoring devices rather than ones whose application is tied to the supervision of professional personnel is of great importance and calls for user-friendly designs and the development of wireless communication networks. Developing sensors that can be directly sewn into daily loose-fitting garments can provide users with comfort and long-term applications and should seriously be taken into account in the future.
In most of the previously reported sensors, single-modality devices have been developed and introduced to detect one unique stimulus. However, in real applications, multimodality, that is, the capability of simultaneously sensing different stimuli, is a dire need. One of the methods to address this challenge is the integration of multi-stimuli-responsive materials in one structure, such as a FET platform. Tien et al. 97 have used a P(VDF-TrFE)/BTNP (barium titanate nanoparticle) composite as a piezo-pyroelectric gate dielectric into FET that leads to the ability to simultaneously monitor temperature and strain (static and dynamic). Zhu et al. 99 integrated multipurpose sensors (PENG and TENG) into a sock to harvest energy and sense a variety of different signals, such as gait, contact force, and sweat level. This structure is composed of PEDOT:PSS-coated fabric as TENG and PZT piezoelectric chips serving as PENG. Inspired by fingertip skin, Park et al. 100 demonstrated the fabrication of a multimodal e-skin that is capable of recognizing both static and dynamic pressure and temperature. This structure, which works based on the integration of three mechanisms (piezoresistivity, piezoelectricity, and pyroelectricity), is made of ferroelectric PVDF and rGO composite films with some interlocked microdome arrays that are responsible for the piezoresistive behavior of the sensor and some fingerprint-like microridges on the outer surfaces that enhance its tactile sensitivity.
Another solution to this challenge is to embed two or more sensors in one platform. For example, Kiaghadi et al. 53 embedded five fabric-based sensors (one tribo- and four piezoresistive pressure sensors) into a loosely worn pajama to simultaneously detect sleep posture and physiological signals such as respiration and heartbeats. In this scenario, minimization of the number of integrated sensors would be a matter of importance.
Providing electric power is an indispensable part of designing any electronic device. In order to have a sensor work efficiently in an on-battery long-time application, we need to decrease the operating voltage and, subsequently, the corresponding power consumption of the device. Strain sensors made with elastic matrix filled with conductive materials usually require high operating voltages (10–100 kV), which makes them almost impossible to be used in daily applications. Sheng et al. 101 proposed an ultra-high-sensitivity (161.6 kPa–1) sensor made of bubble-decorated honeycomb-like graphene film, which can detect human motions such as finger bending with an operating voltage as low as 10 mV. Some of the OFET-based pressure sensors are also reported to have very low power consumption (<1 mW). Another approach to surmount this burden is taking advantage of self-powered sensors such as TENG and PENG. In this regard, a freestanding triboelectric nanogenerator (FTENG) layer was fabricated that can convert the mechanical energy produced by hand sliding or foot stepping on the pad to electrical energy capable of driving 100 light-emitting diodes. 102 This FTENG made of fluorinated ethylene propylene (FEP) as the negative tribo-layer and two Al-deposited acrylic substrates as the electrodes can provide a maximum power density of 6.7 W/m2 to a load. In addition to the mentioned issues, the system should reduce the effect of noise sources such as motion artifacts, electromagnetic noises, and static field coupling on the signal. Depending on the type of noise, it can be addressed through different solutions, such as using skin-mounted structures or tight-fitting garments to avoid motion artifacts, and using a conductive shield as a Faraday cage, differential amplification of the signal, and analog filtering in case of EM and electrostatic noises. 95
Considering the prominent future for wearable sensors for human motion activity monitoring, researchers must focus on leveraging low-cost, biocompatible, and environmentally friendly materials with cost-effective fabrication processes and scalability that results in the widespread adoption of the devices in society.
Footnotes
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This material is based upon work supported by the National Science Foundation under CSR: Medium 1763524.