
Abstract
Locomotive robots based on tensegrities have recently drawn much attention from various communities. A common strategy to realize long-distance locomotion is combining several basic gaits that are designed in advance. Considering the unavoidable uncertainties of the environment and the real locomotive system, selecting the gaits with high robustness is essential to the implementation of long-distance locomotion of tensegrity robots. However, no quantitative approach for robustness evaluation of rolling gaits is reported in recent research work. In this study, a practical and quantitative method is proposed for the robustness evaluation of rolling gaits of tensegrity robots. A mathematical model is built to describe the evaluation process, and the success rate of rolling is adopted as an indicator of robustness. Sensitivity analysis and robust evaluation are conducted on the rolling gaits of a typical six-strut tensegrity robot. Specifically, the sensitivities of the rolling gaits to five uncertain parameters (i.e. tendon stiffness, initial tendon prestress, the equivalent mass of nodes, actuation lengths of actuators, and slope of ground) are investigated and discussed in detail, and the robustness of the rolling gaits is evaluated by correlated random sampling. Experiments on a physical prototype of the six-strut tensegrity robot are carried out to verify the proposed concept and method.
Introduction
A tensegrity system is a special self-equilibrated pin-jointed structural system comprising a discontinuous set of compressed components inside a continuous set of tensioned components. 1 The shape of a tensegrity system can be actively controlled by adjusting the prestress in the components, making it a good candidate for structural systems that require controllable shapes, such as smart structures, 2,3 deployable structures, 4,5 and locomotive robots. 6 –8
More attention has been paid to tensegrity-based robots due to their features of lightweight, efficiency, and high deformability. Paul et al. 9 investigated the dynamic characteristics and control strategies of tensegrity robots and conducted experimental validation using physical prototypes. Shibata et al. 10 designed and experimentally validated the crawling behaviors of tensegrity robots based on body deformation. Boehm and Zimmermann 11 proposed vibration-driven mobile robots based on single actuated tensegrities. Among various types of tensegrity robots, spherical tensegrity robots with rolling gaits have attracted the most attention due to their excellent locomotion ability. Spherical tensegrity robots have excellent locomotion ability and thus have potential application in fields such as planetary exploration. Koizumi et al. 12 designed and tested a spherical tensegrity robot driven by a set of pneumatic soft actuators, which can perform rolling over flat ground. Caluwaerts et al. 13 developed a physical prototype of a six-strut spherical tensegrity robot. Kim et al. 14 presented a spherical tensegrity robot that can deliver payloads over a long distance by combining cable-driven rolling and thruster-based hopping. Chen et al. 15 demonstrated a teleoperated spherical tensegrity robot capable of performing locomotion on steeply inclined surfaces. Luo and Liu 16 set up a mathematical model of spherical tensegrity robots and analyzed the relationship between the deformation and the trajectory of the tensegrity centroid. Böhm et al. 17 proposed a locomotion system based on a spherical tensegrity consisting of two compressed curved members and a continuous net of tensioned members. Zhang et al. 18 achieved automatic learning of rolling gaits for a tensegrity robot based on mirror descent guided policy search. It is worth noting that automatic learning is a hot topic in the robot field. For example, Tutsoy et al. 19 modeled the legged NAO humanoişd robot and developed a reduced-order reinforcement learning-based robot adaptive control algorithm for the balancing task.
Rolling is the main locomotion form of spherical tensegrity robots to achieve long-distance movements. The long-distance rolling of a spherical tensegrity robot is usually composed of a series of rolling gaits. Cai et al. 20 generated a series of repeatable rolling gaits with identical initial and final states for possible long-distance rolling. Lu et al. 7 proposed a Dijkstra algorithm-based path planning approach to combine rolling gaits for long-distance locomotion. Chang et al. 21 presented a path planning method based on basic rolling gaits using the A* algorithm. Littlefield et al. 22 proposed approaches to produce long-term locomotion using rolling gaits, in which a standard search method is used for simple environments and an informed sampling-based planner for complex environments.
The robustness of rolling gaits should be considered when applying the tensegrity robots in practice. The rolling gaits obtained from numerical simulation might deviate from expectations when applying in practice due to the uncertainties of the environment and the real locomotive system. Therefore, robust rolling gaits capable of executing the expected motions under the uncertainties are needed for a real tensegrity robot. There have been some research on generating robust motion of tensegrity robots. For example, Iscen et al. 23 proposed a coevolution algorithm to generate robust goal-directed motion for a six-strut tensegrity robot. A learning algorithm together with form-finding-based simulation was used to generate robust movement for a six-strut tensegrity robot (Kim et al. 24 ). These kinds of research provide effective ways for generating robust motion of tensegrity robots. However, the robustness mentioned in both the above studies is conceptual and qualitative, and no quantitative uncertainties of parameters have been considered and no quantifiable definition of gait or motion robustness has been proposed. A quantitative approach is needed to better understand and evaluated the robustness of tensegrity robots.
In this study, the robustness of spherical tensegrity robots that achieve long-distance movement by combining several basic rolling gaits is quantitatively investigated. A definition for the robustness of the motion gaits is proposed, and a procedure evaluating the robustness involving the uncertainties of physical parameters and environment is developed. The proposed definition and procedure are numerically and experimentally employed on a six-strut spherical tensegrity robot.
The layout of the article is as follows. The definition and evaluation procedure of the robustness for rolling gaits of spherical tensegrity robots are presented in the second section. The third section presents the structural configuration of a six-strut tensegrity robot and a number of typical rolling gaits of it. The fourth section investigates the sensitivities of structural and environmental parameters and then selects the parameters involved in robustness evaluation. In the fifth section, the robustness of the rolling gaits of the six-strut tensegrity robot is evaluated by the proposed approach. Experimental validation based on a physical prototype of the six-strut tensegrity robot is carried out in the sixth section. Finally, the seventh section concludes the article. Figure 1 shows the main steps of the robustness evaluation of rolling gaits.
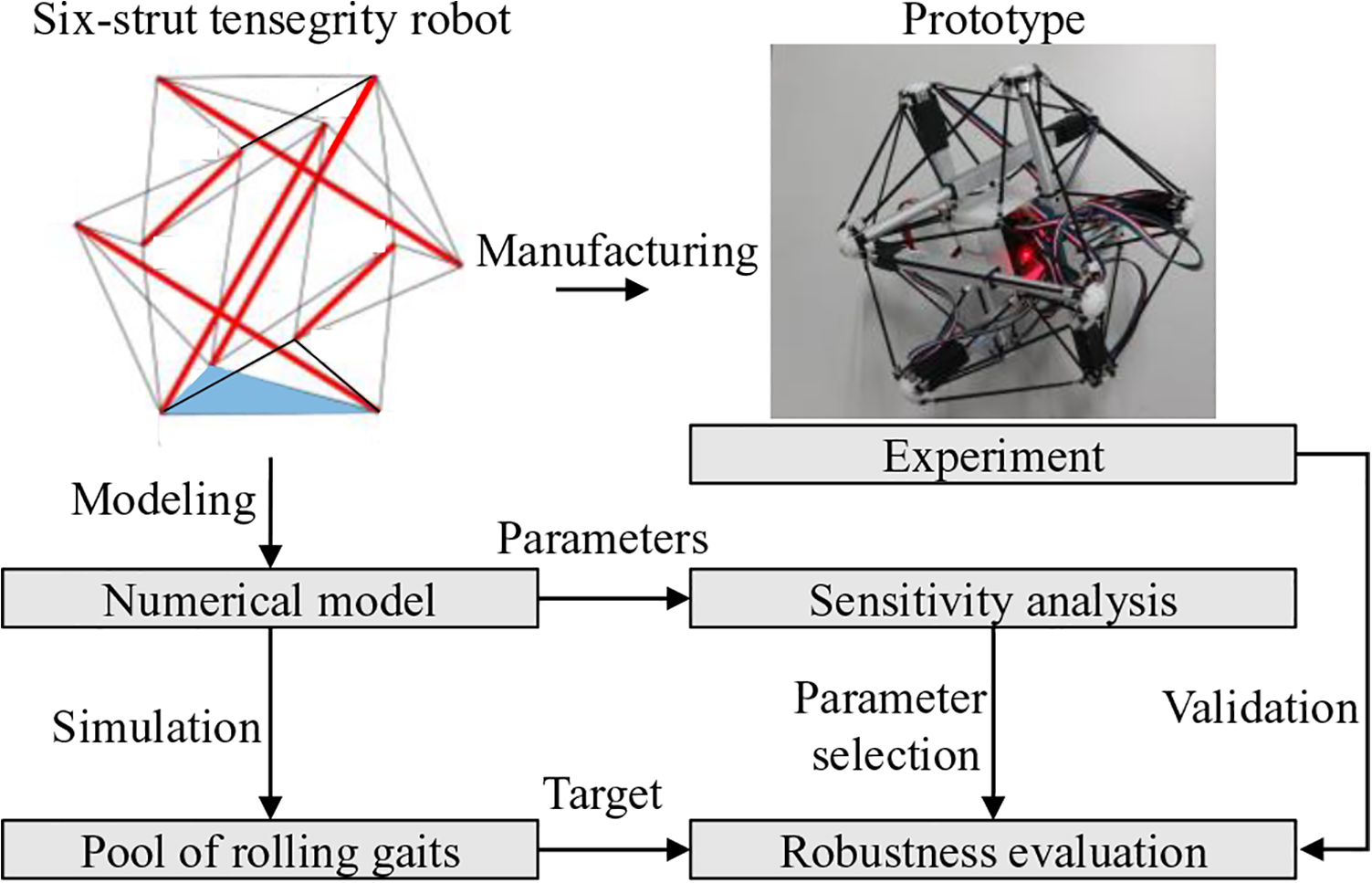
Steps of robustness evaluation.
Definition and method
Rolling gait
Tension members of a tensegrity are assumed to be only able to bear tensile forces, while compression members are assumed to be rigid and able to bear both compressive and tensile forces. Spherical tensegrity robots that achieve long-distance movement by combining a number of basic rolling gaits are considered. A rolling gait denoted as Bi can be determined by the actuations of actuators and the initial state of the tensegrity system, that is

where

where

where
The internal force vector

where

where

Gait robustness and evaluation procedure
The relationship between the robustness of rolling gaits and the uncertainties of environmental and structural parameters might be highly nonlinear, and finding an explicit solution can be quite difficult or even impossible. Monte Carlo sampling provides a simple and direct way to estimate the robustness by repeated tests. Therefore, it is adopted here to obtain a preliminary and global insight on the robustness of rolling gaits of tensegrity robots. The parameters of a tensegrity robot are randomly sampled using given distributions. A rolling gait is tested using various sampling results, and the success rate of the gait is calculated and used as an index of the robustness, that is

where
To evaluate the robustness with the above definition, a procedure including four steps is developed as follows: Define a pool of gaits Set the standard values of parameters Define the random samples of parameters For each gait
Six-strut tensegrity robot
Structural configuration
The six-strut tensegrity robot is a typical kind of spherical tensegrity robots, which have potential application in the exploration of complex environments due to their excellent locomotion ability. The six-strut tensegrity robot is adopted here because of its simplicity and representativeness. The robustness of the numerically generated rolling gaits of the six-strut tensegrity robot under the uncertainties of the environment and the real locomotive system is evaluated. This study will be helpful in the design or selection of more robust locomotive gaits based on numerical simulations. As shown in Figure 2, the tensegrity is composed of 6 struts, 12 nodes, and 24 tendons. Each node is connected to a strut and four tendons. The six struts are divided into three pairs, and the struts in each pair are parallel to each other at the reference state. The outside surface of the tensegrity is a pseudo-icosahedron that consists of eight closed triangles (TCs) and 12 open triangles (TOs). A TC has three tendon edges, and a TO has two tendon edges and a virtual edge without structural members. These triangles are numbered for the convenience of rolling gait descriptions, as listed in Table 1. According to the types of touching-ground triangles, there are two basic states for the tensegrity: TC state and TO state, as shown in Figure 2. In a rolling gait, the tensegrity moves from one state to the other state. To ensure the repeatability of the rolling gaits, the initial state and final state of a rolling gait are required to be identical to one of the basic states. As a result, the rolling gaits can be classified by the type of touching-ground triangles. The struts labeled with the prefix “A” in Figure 2(a) are used as active members whose rest lengths can be actively changed by actuators. The rest length of the actuated struts is assumed as 200 mm at the initial state and it is able to change within 156–256 mm at a speed of 14 mm/s. Hence, in this typical case,
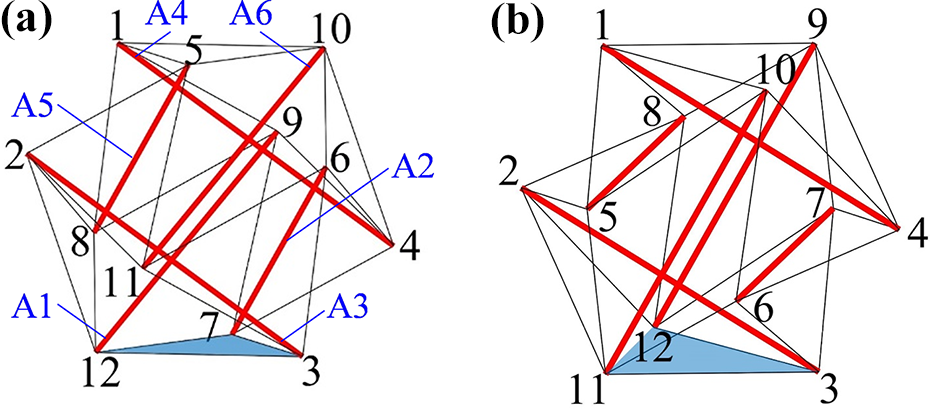
Six-strut dynamic tensegrity: (a) TC state and (b) TO state. TC: closed triangle; TO: open triangle.
Number of triangles.

Properties of members.

Pool of rolling gaits
Various rolling gaits for the six-strut tensegrity robot can be generated by an approach based on a genetic algorithm incorporated with the incremental dynamic relaxation method. 20
Typical rolling gaits with different initial and final touching-ground triangles and different control strategies are listed in Table 3, that is, gaits
Gait library for robustness evaluation.a

TC: closed triangle; TO: open triangle.
a Positive and negative actuation lengths indicate elongation and shortening, respectively.
Sensitivity analysis of parameters
Parameters with significant influences on the rolling gaits are opted to be involved in the robustness evaluation. In this section, sensitivity analysis of parameters is conducted to identify the main parameters that have significant influences on the rolling gaits.
Analysis method
The tornado diagram is utilized for the sensitivity analysis of parameters. 25 In the tornado diagram, the sensitive parameter is modeled as an uncertain value while all the other parameters are held at baseline values, and thus, the effect of the sensitive parameter on the target variable can be obtained. The relative importance of parameters can be evaluated according to the effects of each parameter. A target variable should be selected to evaluate the influence of parameters. Since the objective of a rolling gait is to achieve motion of the tensegrity system and the traveling distance of the tensegrity centroid can be used to indicate whether the expected motion does happen, the traveling distance of the tensegrity centroid is taken as the target variable in the sensitivity analysis.
The main steps of sensitivity analysis are detailed as follows: Select uncertain parameters Set the values of Assume that Determine Replace Draw a tornado diagram using Tar_Value_50, Tar_Value_10, and Tar_Value_90, in which Tar_Value_50 is taken as a reference. Determine the main sensitive parameters based on the tornado diagram.
Parameters participated in sensitivity analysis
According to the authors’ experience on the design, manufacture, and test of a physical prototype for the six-strut tensegrity robot,
7,20,26
the tendon stiffness
The initial orientations of the tensegrity system in TC-state and TO-state on a slope are shown in Figure 3. The slope direction is perpendicular to y-axis, and the changeable slope angle
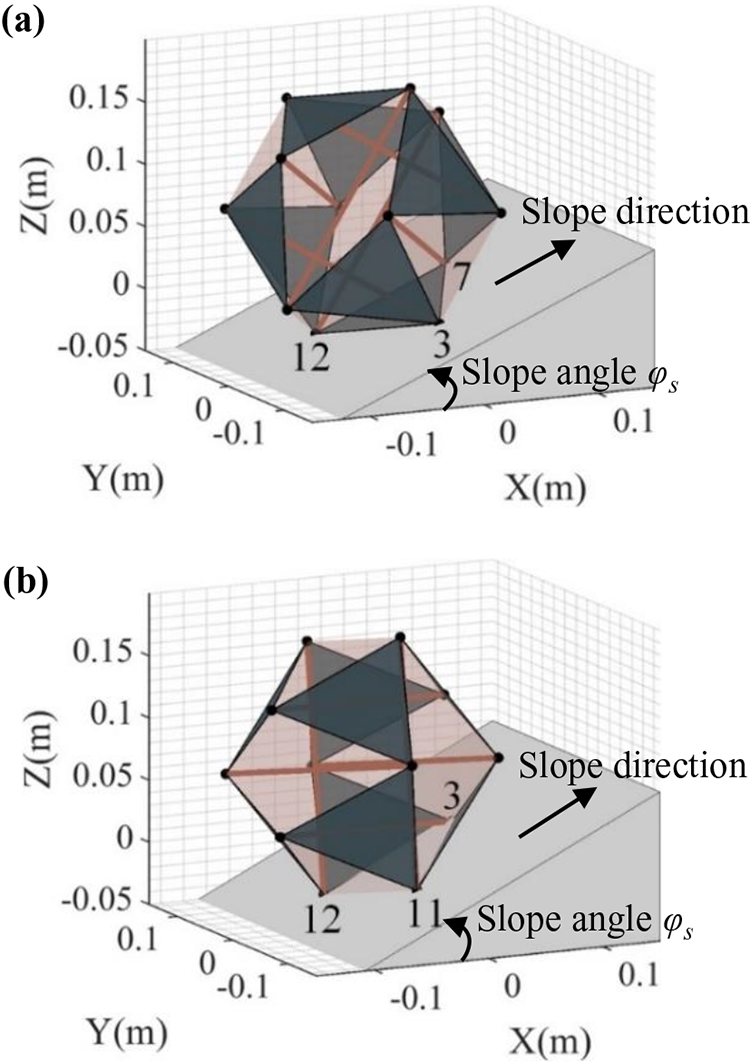
Orientation of tensegrity on slope: (a) TC state; (b) TO state. TC: closed triangle; TO: open triangle.
Since the range of uncertainty of each parameter is unknown in practice, the value of each parameter is assumed to have a distribution with the design value as the mean and 0.4 times of the design value as the standard deviation. The distributions and
Distributions of interested parameters.

Tornado diagram
The mean and standard deviation of the target variable are calculated based on Table 4 and recorded in Tar_Value_10 and Tar_Value_90, as listed in Table 5. The tornado diagram is shown in Figure 4, in which the yellow and blue bars represent Tar_Value_90 and Tar_Value_10, respectively, and the green bar denotes the overlapping portion of them. It is found that the variation ranges of the target variable due to the uncertainties of the four structural parameters are comparable to each other. The variation due to the uncertainty of
Values of target variable (unit: cm).

TC: closed triangle; TO: open triangle.
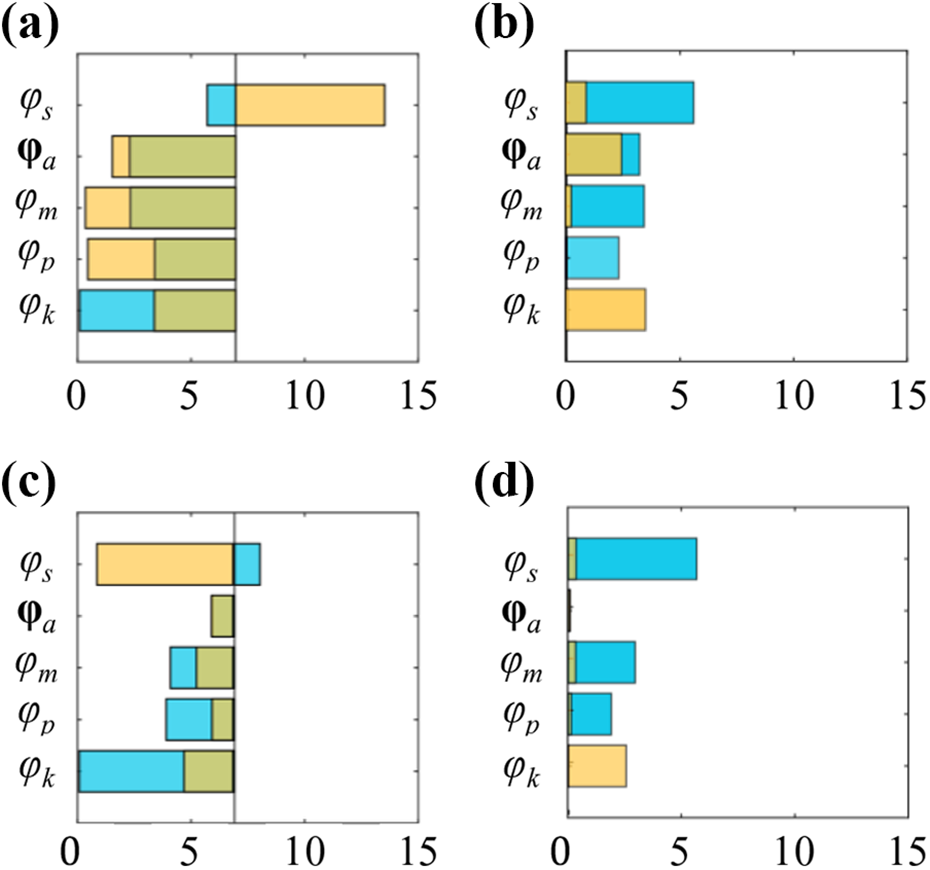
Tornado diagram of parameters (unit: cm): (a) TC-TO mean, (b) TC-TO standard deviation, (c) TO-TC mean, and (d) TO-TC standard deviation. TC: closed triangle; TO: open triangle.
Robustness evaluation of rolling gaits
Fifty samples are generated by correlated random sampling on the five uncertain parameters to build the state library
Results of robustness evaluation.

It is also found that the robustness of rolling gaits decreases or remains unchanged as the scale factor of actuation lengths decreases when the same number of actuators is used. As given in Table 6, for gaits 1–3, 4–6, and 7–9, which use three, four, and five actuators, respectively,
Experiments
Physical prototype
Experiments on a physical prototype of the six-strut spherical tensegrity robot are carried out to verify the proposed concept and method. The physical prototype that is based on the configuration detailed in the third section was manufactured, as shown in Figure 5. The properties of the members used in the prototype are identical to those given in Table 2. Six servo linear actuators are used as active struts, and 24 rubber ropes are used as tendons, and the actuators and rubber ropes are connected with 3D printed nodes. The servo linear actuators each have an initial length of 15.6 cm and able to actively change to 25.6 cm at a rate of 14 mm/s. At the initial state, they extend to 20 cm to prestress the system. The weight of each servo linear actuator is 56.0 g and the weight of each 3D printed node is 4.0 g. Hence, a servo linear actuator plus two nodes at the ends of it has a total weight of 65.0 g. The rubber ropes each have an initial length of 6.0 cm, a stiffness of 104 N/m, and a weight of 1.0 g. In the center of the prototype system, a control box consisting of a Bluetooth communication module, a servo control module, and a lithium battery is attached to the nodes with 24 rubber ropes the same as those used for tendons. It has a size of 50 × 50 × 60 mm3 and a weight of 127.6 g. Note that the nominal properties of the structural members and the control components given above are identical to the corresponding assumed properties used in the numerical simulations.

Physical prototype of six-strut tensegrity robot.
The prototype is wirelessly controlled through Bluetooth communication with a control program installed in a personal computer. The control program with a graphic user interface (GUI) is developed base on the stm32 platform. Each actuator can be controlled by executing an input command, and multiple actuators can be actuated simultaneously by this program to achieve a rolling gait. By inputting a series of commands, multiple step control of the actuators can be conducted to achieve a series of rolling gaits for long-distance locomotion. The real-time actuation can be read on the GUI.
Experiment scheme
The rolling gaits listed in Table 3 are tested using the physical prototype. Though the rolling gaits listed in Table 3 are all represented as using TC-6 or TO-5 as the initial touching-ground triangle, they are also applicable to other initial states due to the pyritohedral symmetry of the structure with order
Experimental results
A typical successful rolling is shown in Figure 6. The tensegrity robot starts with a touching-ground triangle of TO-2 and achieves the rolling by using a control strategy corresponding to the gait 13. The experimental results of robustness evaluation are listed in Table 7. Note that the superscript p denotes experimental results, and
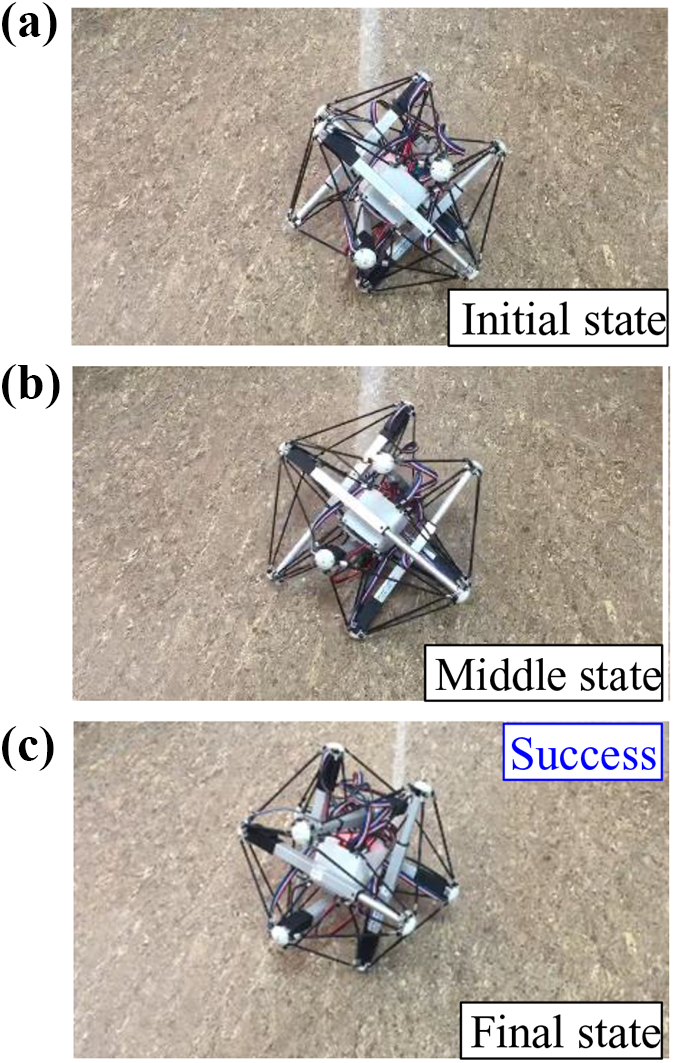
Experimental observation on gait 13 starting from TO-2: (a) initial state, (b) middle state, and (c) final state. TO: open triangle.
Experiment results of robustness evaluation.

Conclusions
A practical method is proposed for the robustness evaluation of rolling gaits of tensegrity robots. A mathematical model is built to describe the evaluation process, and the success rate of rolling is adopted as an indicator of robustness. Sensitivity analysis and robustness evaluation are conducted on the rolling gaits of a six-strut tensegrity robot. Specifically, the sensitivities of rolling gaits to five uncertain parameters, that is, tendon stiffness, initial tendon prestress, the equivalent mass of nodes, actuation lengths of actuators, and slope of the ground, are analyzed, and then, the robustness of rolling gaits is evaluated by correlated random sampling on the five uncertain parameters. Experiments are carried out using a physical prototype of the six-strut tensegrity robot. Based on the numerical and experimental results, it is found that the robustness of rolling gaits increases as the number of used actuators increases; and reducing the actuation lengths proportionally is observed to lead to the decreasing of the gait robustness. Moreover, the robustness of TC→TO type gaits is usually lower than the robustness of TO→TC type gaits, and the robustness of the gaits might be combinedly affected by the number of actuators, the actuation lengths, and the gait type.
The qualitative agreements between the numerical results and the experimental results indicate that the proposed robustness evaluation method is effective in both simulated cases and physical cases. There are still quantitative differences between the experimental and numerical results. This is caused by the unavoidable difference between the numerical model and the physical prototype: (1) the numerical model simplifies the real three-dimensional components and joints of the tensegrity robot by lower-dimensional idealized virtual components and volume-less nodes, which makes the numerical touching-ground triangle deviate from the experimental one; (2) the self-weight of the system is applied by equivalent nodal masses in the numerical model, ignoring the change of mass distribution during rolling; and (3) the magnitudes and distributions of the uncertainties are ideally assumed. Using a more elaborate physical prototype and an improved numerical model will be able to reduce the differences between the numerical and experimental results. For example, the stability of the contact between the joints and the ground can be improved using ball-like plastic joints as used by the Reservoir Compliant Tensegrity Robot, 13 and the magnitudes and distributions of some uncertainties such as the tendon stiffness, the initial tendon prestress, the equivalent mass of nodes, and actuation lengths of actuators can be determined by repeated tests in advance. These improvements will be adopted in the authors’ future works. It is also worth noting that since the magnitudes of the uncertainties is assumed in advance, the effect of the magnitude of the uncertainties on the robustness of a given rolling gait is not shown in this study and needs further investigation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed the receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Research and Development Program of China [Grant No. 2016YFC0800200], Natural Science Foundation of Zhejiang Province [Grant No. LR17E080001& Y18F030012], and the National Natural Science Foundation of China [Grant Nos. 51778568 and 51908492].