
Abstract
A new variable stiffness four-finger soft gripper with a combination of rigid and soft structures is designed. The combination of rigid and soft structures is one of the methods to improve the performance of soft grippers. Grasping motion is achieved by the rigid structure of the screw and the connecting rod. Soft gripper uses human finger-like structure made of silicone, and the air pressure and the rigidity of the soft fingers can be adjusted by the air pump. The soft gripper overcomes the inability of a rigid gripper to easily and safely grasp soft and brittle objects and the inability of a completely soft gripper to exert sufficiently high forces to achieve effective grasping. Grasping force can be improved by increasing the stiffness of the finger and the driving stroke of screw. The variable grasping force allows the soft gripper to grasp different shape objects, specially soft and brittle objects.
Introduction
In recent years, many conventional manipulators such as rigid operators and dexterous hands have been widely used in industrial production. 1 These manipulators are mainly made of rigid structures such as metal or plastic. They are equipped with complex mechanical transmission structures, sophisticated sensors, and closed-loop control systems, relying on precise control to grasp objects. 2 However, for flexible and delicate objects, such as fruits and glass, there is a higher demand in the grasping motion by rigid manipulators. Unlike industrial robots requiring high precision and rigidity, compliance is one of the major concerns in robotic studies because hard contacts make robots unadaptable to most natural environment, especially dynamic human environment, and pose high risks to human and objects. 3 With strong will to resolve this issue, soft robots attracted attention in the robotics research due to their superiorities compared with traditional robots in their adaptability to complex environments. 3
In the last few decades, researchers have been studying soft grippers for various functions. Flexible manipulators’ high safety is suitable for grasping brittle and delicate objects, and high flexibility is suitable for grasping different shapes of objects. 4 As a result, a number of flexible manipulators use special materials have been reported, such as memory alloy, 5,6 dielectric elastomer actuators, 7 and soft muscles 8 . Although these manipulators have good compliance with traditional manipulators, they are still not really soft manipulators. Other flexible manipulators are made of soft materials such as silicone. This soft manipulators utilized the fundamental theory of silicone expansion driven by pneumatics to achieve grasping movement, 9,10 Diverse wall thicknesses in the chambers of silicone manipulators lead to different expansion volume, and this phenomenon leads to the required grasping behaviors of soft robots. The soft silicone manipulator can be made into two kinds of shape. One is to mimic the shape of the human finger, through a series of sensors to complete a simple grasp operation, 11,12 or can mimic the human gesture through the surface electromyography signal, 13,14 and even complete the complex action by deep learning finger movements. 15 These researches give the soft hand a lot of functions and have a good effect on the gripping of the object. However, those manipulators require many sensors to feedback and complicated control. The other is three- or four-finger soft grippers that rely on an internal hollow corrugated structure to achieve bending deformation. 16 –18 These soft grippers can be simply considered as silicone actuators with special design, which use hydraulic or pneumatic drive to reach required bending position. Soft manipulators have low manufacturing cost, 19 and the open-loop control can be used due to soft material properties. 20 This is because soft grippers can make soft contacts with different target objects and are adaptive to different object shapes without safety concerns. In this way, soft grippers have simple mechanisms that can be easily fabricated. 21 However, soft manipulators usually are not able to deliver a large force and high strength as traditional robots do. This also limits the application of soft grippers in many situations. Improving the contact force of soft grippers is a key issue that many researchers are concerned about now. Grasping force of the soft finger can increase by changing its stiffness, such as filling passive particle jamming 22 or replacing the material at the fingertip with a rigid material. 23 These methods can increase the grasping force but reduce the reliability to grasp soft and brittle objects. So we are looking for a new way to improve the contact force of the soft grippers.
In this work, a variable stiffness four-finger soft gripper with both adaptation ability and robust grasping force was designed. The soft finger is completely made of silicone into a hollow structure and does not fill any other substances to increase the hardness. The gripper can use the air pressure feedback information to achieve closed-loop control to make the grasping process more reliable. The motion trajectory, velocity, and acceleration of the fingertip are derived by the Denavit–Hartenberg (D-H) model to solve the problem that the final velocity and position of the traditional soft fingers are unknown. The grasping force of the soft gripper can be improved by increasing the drive stroke and inner pressure of soft fingers. Experiments show that the soft gripper can easily and safely grasp different shape objects.
Structural design
Soft robotic hands or grippers are able to perform dexterous grasping but usually could not provide comparable stiffness range as rigid manipulators do. In this design, the soft gripper combines the advantages of rigid and soft manipulator. The soft finger could inflate by an air pump to change the stiffness to improve the flexibility and adaptability. The gripper is moved by the screw which can provide a large driving force which overcomes the inability of the grasping force.
Rigid structure
There are many studies on the drive of the manipulators, such as bevel gear, 24 linear actuators, 25 or wire drive. 26 By means of pulley or wire drive, although soft fingers can be controlled separately, the coordination between each finger is complicated. To reduce control complexity and volume, the self-locking screw is designed as the driving mechanism as shown in Figure 1 to complete coordinated movement of four soft fingers. Use the linkage mechanism to mimic the joints of the human hand, so that the movement of the soft fingers during grasping process is more like a human hand.

Screw and link mechanism of soft gripper.
The movement trajectory of the soft fingers is mimicked by the link mechanism and stepping motor. The stepping motor drives the screw to rotate, pushing the nut to move forward. The connecting rod mechanism is connected by a connecting rod and a nut, and the gripping motion is completed under the pushing of the nut.
Soft finger
The soft finger as shown in Figure 2(a) is manufactured by pouring the food-grade silicone into the three-dimensional (3-D) printed mold. The molds are formed by a 3-D printer, and the printed material is polylactic acid. The food-grade silicone is a type of inorganic polymer colloidal material which is condensed by silicic acid, and the main composition of the food-grade silicone is SiO2·nH2O. The characteristics of the food-grade silicone are as follows: (1) soft, flexible, resistance to kink deformation; (2) no crack, long service life, high-temperature resistance; and (3) health and safety. The coefficient of food-grade silicone in this design is as follows: the viscosity is 2000 Pa·s, the hardness is 18 Å, the elongation is 450%, and the tensile strength is 30 N/mm. As shown in Figure 2(b), the finger is a thin-walled hollow structure. Due to the material properties of flexible silica, it can withstand a maximum pressure of about 17 kPa and provide greater stiffness. A hole at the bottom of the finger is connected with the air pipe, and the finger is inflated by the air pump through the air pipe. The air pressure sensor is connected with the other end of the air pipe to monitor the pressure in real time.

Thin-walled hollow structure of soft finger. (a) soft finger, (b) inflated finger.
Control system
The control of soft gripper is shown in Figure 3. The control architecture is implemented in the micro-control unit (MCU), which uses the Cortex-M3 for signal communications. The stepping motor is controlled by the MCU to drive the screw and connecting rod. The speed of grasping movement can be changed by adjusting Pulse width modulation (PWM) of the stepping motor. The control signal output from the relay can control the switch of the air pump to adjust the internal air pressure of the soft fingers. The soft finger is connected to the air pump and pressure sensor through the air pipe. Pressure is adjusted simultaneously in all four fingers by a single air pump, and the average internal pressure of the four fingers is fed back by a single pressure sensor. But actually there are two air pumps, one is responsible for inflating the finger and the other is responsible for deflating. But these two pumps cannot work at the same time. Inflating four flexible fingers with one air pump can better control the internal pressure of the finger. It can prevent the flexible fingers from being damaged due to excessive changes in air pressure, while ensuring that the internal pressure of each finger is consistent. The grasping force can be adjusted according to the pressure sensor to grasp objects of different shapes.

Control architecture of soft gripper.
Soft gripper
The soft gripper is four soft fingers that are bonded to the rigid drive structure by silicone adhesive. A servomotor is installed at the rear end of soft gripper to increase the freedom of movement. The components such as the air pump are installed in the protective casing to reduce the peripheral volume to obtain a more compact structure. To determine the grab diameter range of the soft gripper, the three objects of different diameters were grasped as shown in Figure 4: sphere (100 mm diameter), cone (80 mm diameter), and cylinder (16 mm diameter). The diameters of the object could be grasped in the range of 10–150 mm.
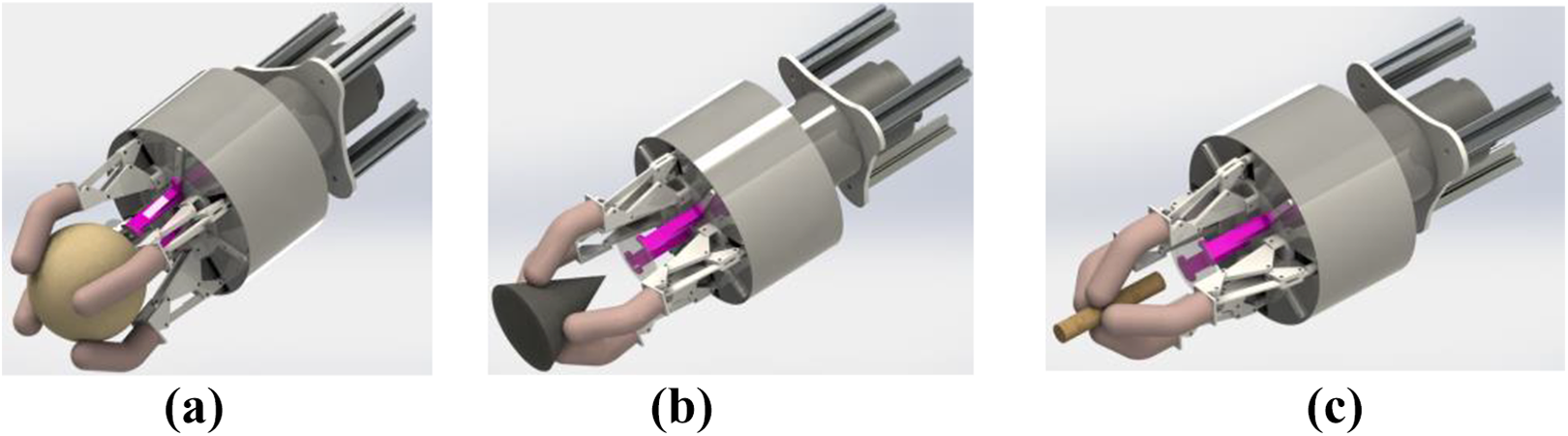
Soft gripper grasp objects of different diameter. Grab (a) a ball, (b) cone, and (c) cylinder.
Kinematic analysis
The soft finger as shown in Figure 5(a) can mimic the motion of the human finger joint by the link structure. The relationship between the driving stroke x of the screw and the trajectory of the fingertip E in Figure 5(b) would be described in this article. As shown in Figure 5(c), the kinematics analysis of the soft finger is mainly based on the movement position and posture change in the space by the rotation angle between the finger joints.

Sketch of one soft finger and D-H model: (a) single finger, (b) structure diagram, and (c) D-H model coordinate system. D-H: Denavit–Hartenberg.
Establishment of the motion model
In Figure 5(b), the link mechanism is an open kinematic chain structure formed by connecting rods which are connected by rotating pairs. The kinematic model is referred to the D-H transformation matrix. The D-H convention was originally introduced to describe the geometric relationship of an open kinematic chain with li−
1 joints and li
links.
27
The coordinate transformation on the two links is generated by the homogeneous coordinate transformation on each of the links.
28
The definition D-H coordinate matrix consists of four components: li
, di
, α i
, and θi
. Define each D-H transformation matrix as T, the relationship between multiple links can be represented by the link matrix

where li is defined as the length of the rod Li , the di is defined as the vertical distance of the 3-D space x coordinate of the rods Li and Li+ 1, the αi is defined as torsion angle of the rod i, and the θi is defined as relative rotation angle of the rods Li and Li+ 1.
The single soft finger only moves in the x–y plane, so the value of di and αi is 0, and the link mechanism can be approximated as a three bar linkages mechanism. So the D-H matrix of the single soft finger is calculated as follows


The coordinates (Ex, Ey, Ez) of the fingertip point E in the basic coordinate system can be expressed as follows

The change of the coordinates of the fingertip during the grasping process is related to the rotation angle between the links. Moreover, the rotation angle between the links is related to the driving stroke x of the screw. In this work, the θ 2 and θ 3 are set to constant values due to the change of θ 2 and θ 3 can be negligible. The relationship between θ 1 and the driving stroke x is shown in Figure 6.

Kinematic sketch of single soft finger.
According to Figure 6, the geometric relationship can be calculated as follows

The relationship of rotation angle of θ 1 and the driving stroke x as follows

where x is defined as the driving stroke x of the screw and the θ
1 and θ are defined as relative rotation angle. The lx
is defined as the horizontal distance between A and O
1 and the ly
is defined as the vertical distance between O and O
1. The
Analysis of the motion trajectory
The parameters of structural size and the rotation angle as presented in Tables 1 and 2 are used to analyze the motion trajectory of soft finger.
The D-H matrix parameter of finger structure.

D-H: Denavit–Hartenberg.
The structural size of finger structure.

According to Tables 1, 2, and equation (6), the relationship between the angle of rotation θ and the movement of driving stroke x can be simulated by MATLAB.
In Figure 7, the rotation angle θ and the driving stroke x are substantially linear, that is, the rotation angle of θ is stable with the increase in driving stroke x. When the driving stroke x = 30 mm, the relationship between the fingertip points Ex and Ey with respect to the driving stroke x is plotted according to equation (4) as shown in Figure 8.

The rotation angle θ versus the driving stroke x.
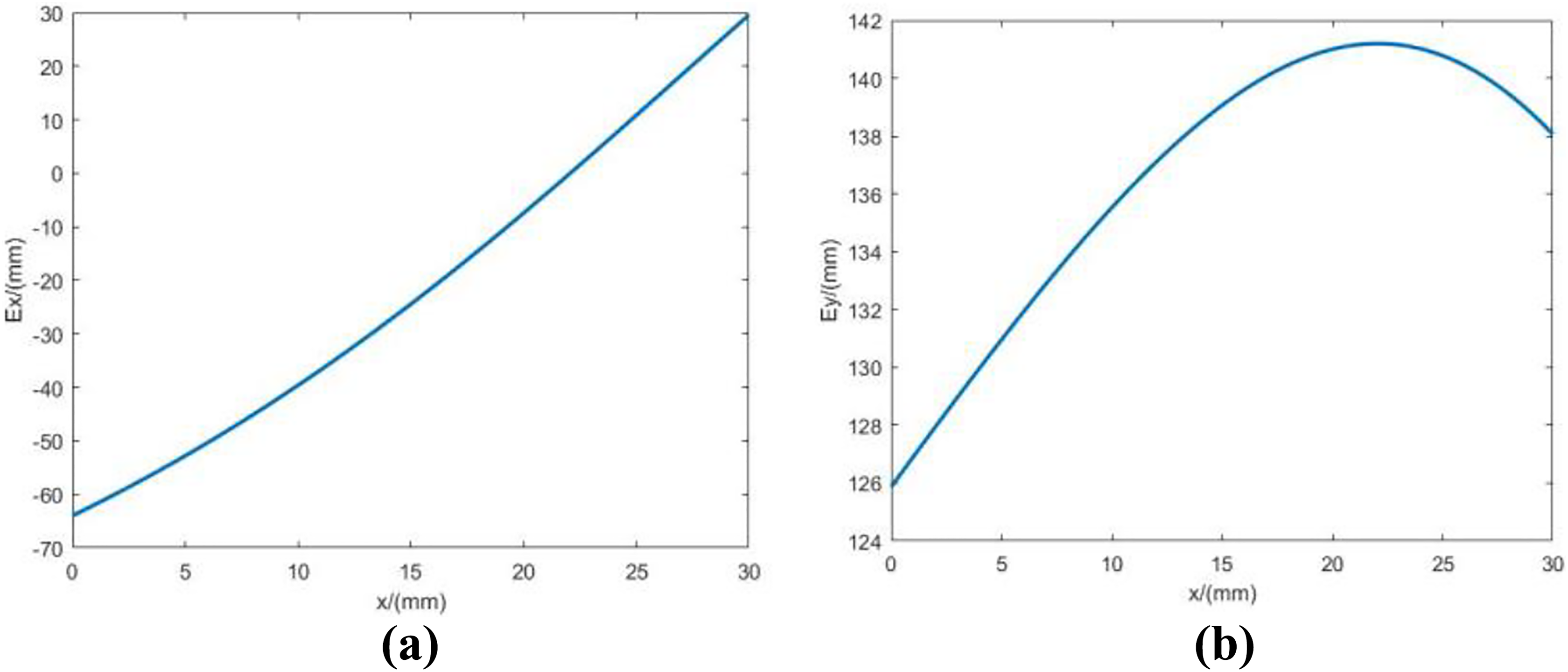
Motion trajectory of Ex and Ey versus the driving stroke x. Curve of fingertip E in the (a) abscissa and (b) ordinate.
As the driving stroke x increases, the change in the abscissa of the fingertip point E can be approximated as a linear curve, that is, the motion in the X-direction is relatively stable. The Y-direction starts to decrease and the rotation of the fingertip increases at x ≥ 22 mm, that is, the rotation of the fingertip relative to the finger base is obvious.
To further illustrate this situation, compare the coordinates of the E point and the joint point O
2 and O
3 in the same picture. As shown in Figure 9, in the X-direction, the coordinate change of O
2 on the root node relative to E and O
3 is small, which is consistent with the change of finger root bending during movement. When
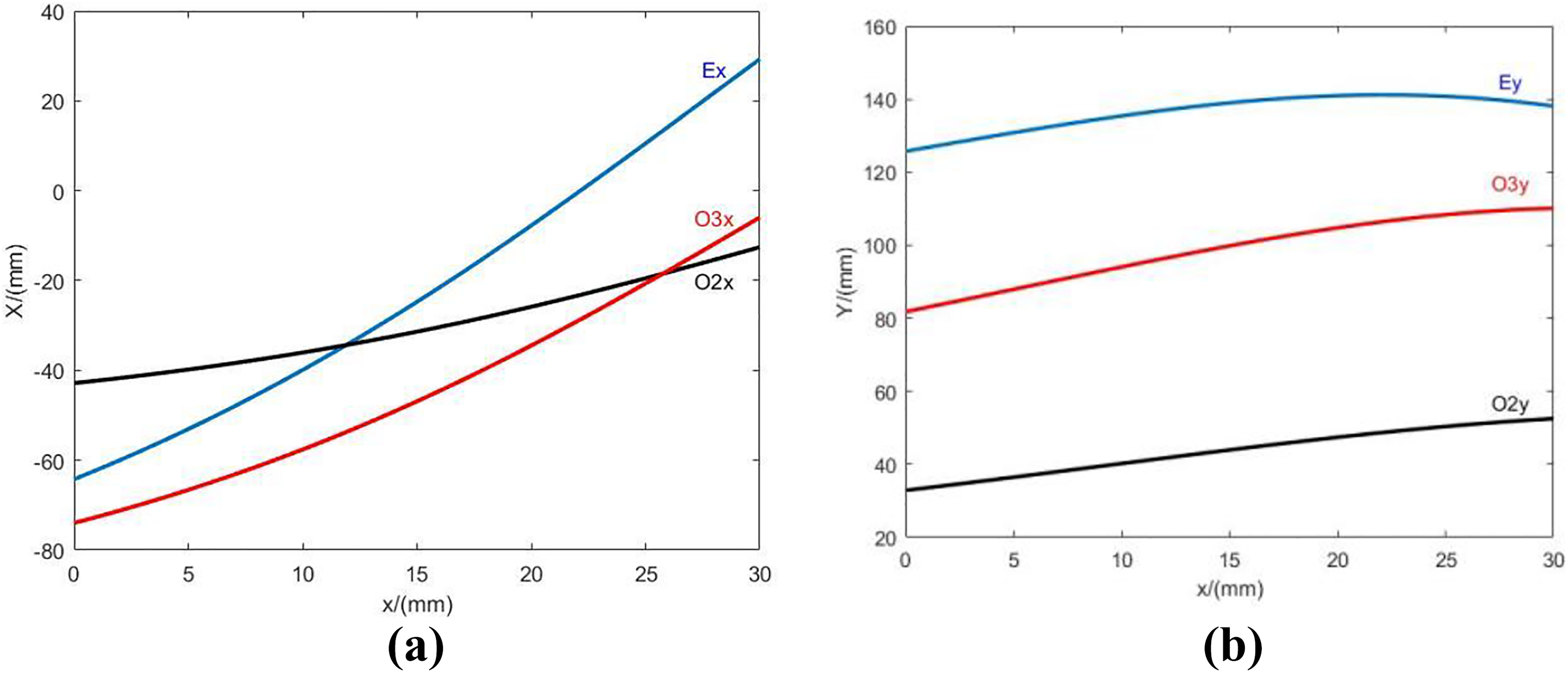
Motion trajectory of E, O 2, and O 3 versus the driving stroke x. Curve in the (a) abscissa and (b) ordinate.
The soft finger can grasp an object safely by moving at a constant speed during the grasping process, and the speed and acceleration of the fingertip are related to the driving speed. When the driving speed is 1 mm/s, the speed in the X-, Y-direction and the total moving speed of the point E of the finger are shown in Figure 10. The speed in the X-direction is increased first and then decelerated, and the speed in the Y-direction is always decelerated. The total speed of motion is continuously decelerating motion. It conforms to the movement speed of the robot during the grasping process.
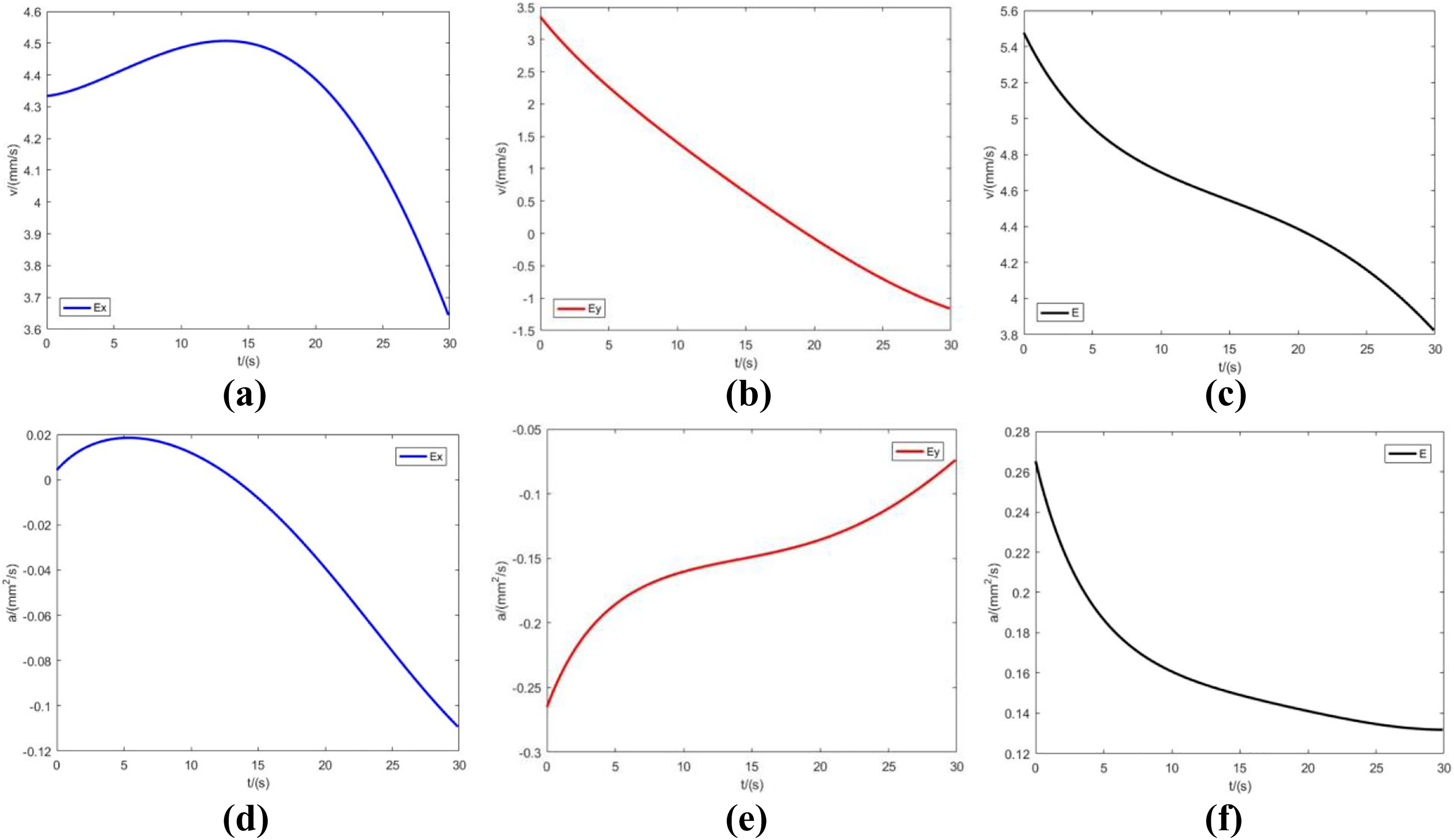
Speed and acceleration of point E versus driving time: (a) X-direction speed, (b) Y-direction speed, (c) speed, (d) X-direction acceleration, (e) Y-direction acceleration, and (f) acceleration.
The speed of the fingertip is mainly determined by the speed of the driving stroke. The speed should not be too fast to avoid damaging the delicate objects, nor can it affect the grasp efficiency too slowly. The stiffness of the soft finger needs some time to be adjusted by the air pump, so the driving speed should not be too fast. Driving speed between 1 and 5 is suitable. The curves of speed and acceleration are shown in Figures 11 and 12 at the driving speeds of 1, 2, and 5 mm/s, respectively.
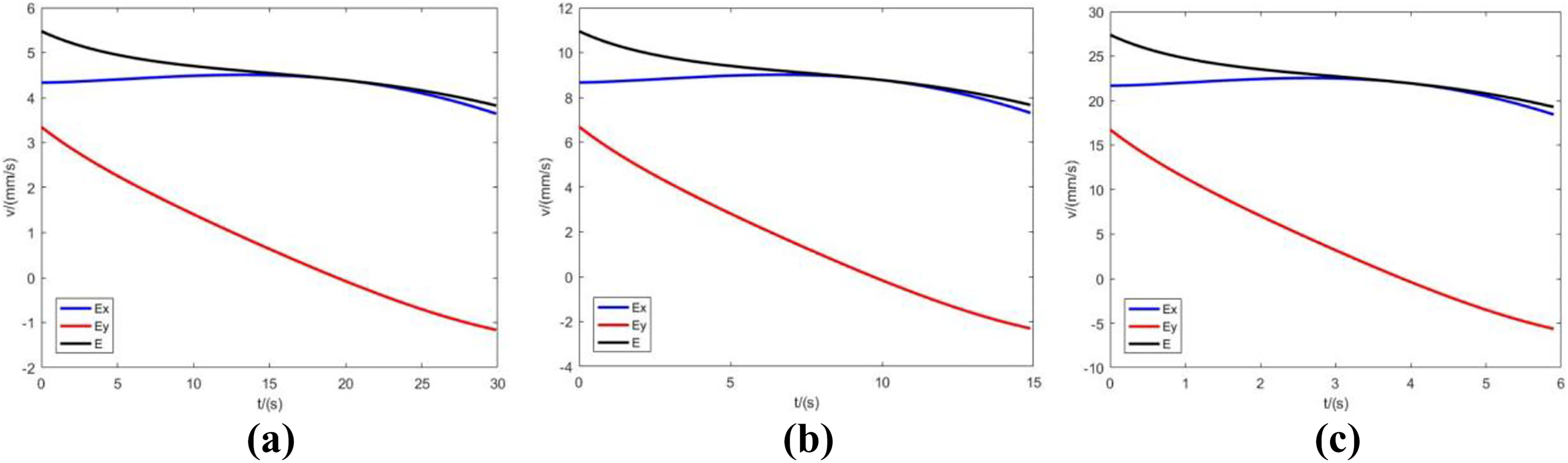
Speed curve of point E under different driving strokes. Driving speed in (a) 1 mm/s, (a) 2 mm/s, and (c) 5 mm/s.

Acceleration peed of point E curve under different driving strokes. Driving speed in (a) 1 mm/s, (a) 2 mm/s, and (c) 5 mm/s.
The increase in velocity of the fingertip point E is proportional to the change in the driving speed, and the increase in acceleration is proportional to the change in the square of the driving speed. Speed of E mainly depends on the speed of the X-direction. The acceleration of E mainly depends on the speed of the Y-direction. The stiffness of the soft finger needs some time to be adjusted by the air pump, so the driving speed should not be too fast. According to the different curves of speed, the driving speed can be adjusted to grasp different objects.
Statics analysis
The soft gripper to grasp objects effectively mainly depends on the contact force, so improving the grasping force is the main work in this article. Soft fingers are difficult to accurately measure the grasping force due to their high flexibility. To verify whether the grasping force during the driving process meets the design requirements and provides a reliable basis for the parameter design of the finger, the static simulation of the soft gripper is generated using the simulation software ADAMS, Automatic Dynamic Analysis of Mechanical Systems Developer, Mechanical Dynamics Inc. [Version 2016].
Due to the symmetry of the four-finger manipulator, the static simulation can be simplified by simulating a single finger. 29 So define the driving force on a single finger as a quarter of the total driving force when performing the simulation. The simulation steps are as follows: (1) import a single-finger SoildWorks model into the ADAMS software and set the corresponding coordinate system. (2) Name each part and distinguish it by different colors in Figure 13(a). The material of different parts by Young’s modulus, Poisson’s ratio, and density is presented in Table 3. The material of the soft finger is defined as silicone, the link mechanism is Polylactic Acid (PLA), the screw is iron, the nuts are copper, and the ball is aluminum. (3) Add constraints to the model, which are the fixed pairs in disks and balls, the rotation pair between the links and the prismatic pair between the screw and nut, and so on. (4) Add drive function and drive force in screw. Set driving speed is 1 mm/s, so the drive function is step(time,0,1,30,1). Set driving force is 20 N, so the driving force of each finger is 5 N. (5) Add the captured object to the model, define the radius of the ball to be 50 mm. The simulation result of the soft finger grabbing the sphere is shown in Figure 13(b), where the red arrow in Figure 13(c) represents the contact force.

Grasping force simulation of soft gripper: (a) initial position, (b) grasping position, and (c) grasping force.
The parameter of different materials.

The grasping force between the soft finger and the ball was simulated in ADAMS. In Figure 14, the soft finger is in contact with the ball when moving from the initial position in the time of 21.5 s. After the contact between the finger and the ball, the grasping force increases to about 1.8 N. Due to the materials of the finger is silicone, a large deformation will occur on the finger after contacting. Since the increase in the contact force when the finger is deformed is nonlinear, the simulation ends only at the moment of the finger in touch with the ball. When the driving stroke further increased, the grasping force could be raised. Improving the rigidity of the finger could also increase the grasping force. The increase in grasping force needs to be further explored in the experimental analysis.

Grasping force versus driving time.
Grasping experiment
Experiment on gripping force
The soft material is prone to deformation when grasping a heavy object, and the deformation causing soft fingers not to exert enough force. The grasping force of soft gripper is the key problem need to be improved. There are two kinds of methods to improve the grasping force.
The first method is increasing the driving stroke. Due to the self-locking effect of the screw and the silicone material of the soft fingers, it is possible to increase the driving stroke to increase grasping force. As the driving stroke increases, the soft finger is compressed and deformed to wrap the object. At this time, the contact area and the frictional force are increased. The driving stroke increase causes the finger to deform as shown in Figure 15. The deformation concentrates on the root of the finger, and the resistance generated by the bending deformation can increase the grasping force. However, such a method is only suitable for grasping a relatively rigid object.

Deformation of soft finger root.
The second way is increasing the internal air pressure of the soft finger to improve hardness, so as to increase the grasping force. 30 To demonstrate the relationship between grasping force and finger stiffness, several tests were conducted on the gripper system. In this experiment, the mass of each air pump is 60g, and the mass of the apple is 241.7g. As shown in Figure 16, multiple grasping experiments on apple of different weights at the same pressure were conducted. The speed and work time of the stepping motor was controlled by MCU first to make the soft fingers touch the apple. Then the gripper grabs the apple vertically off the table and ensures that the object does not fall. If the apple falls or cannot be grabbed off the table, use the MCU to control the air pump to inflate the soft fingers through the relay. The pressure sensor was used to feed back the air pressure inside the finger and combine the relay to keep the pressure inside the finger constant. If the internal pressure of the soft fingers is reduced during the grasping process, the soft fingers are inflated by controlling the air pump through the relay. Repeatedly grabbing the apple to leave the table and stay stable. One of the experimental data was recorded in Table 4. The repeatability determines the probability of the gripper to grasp the sample weight.
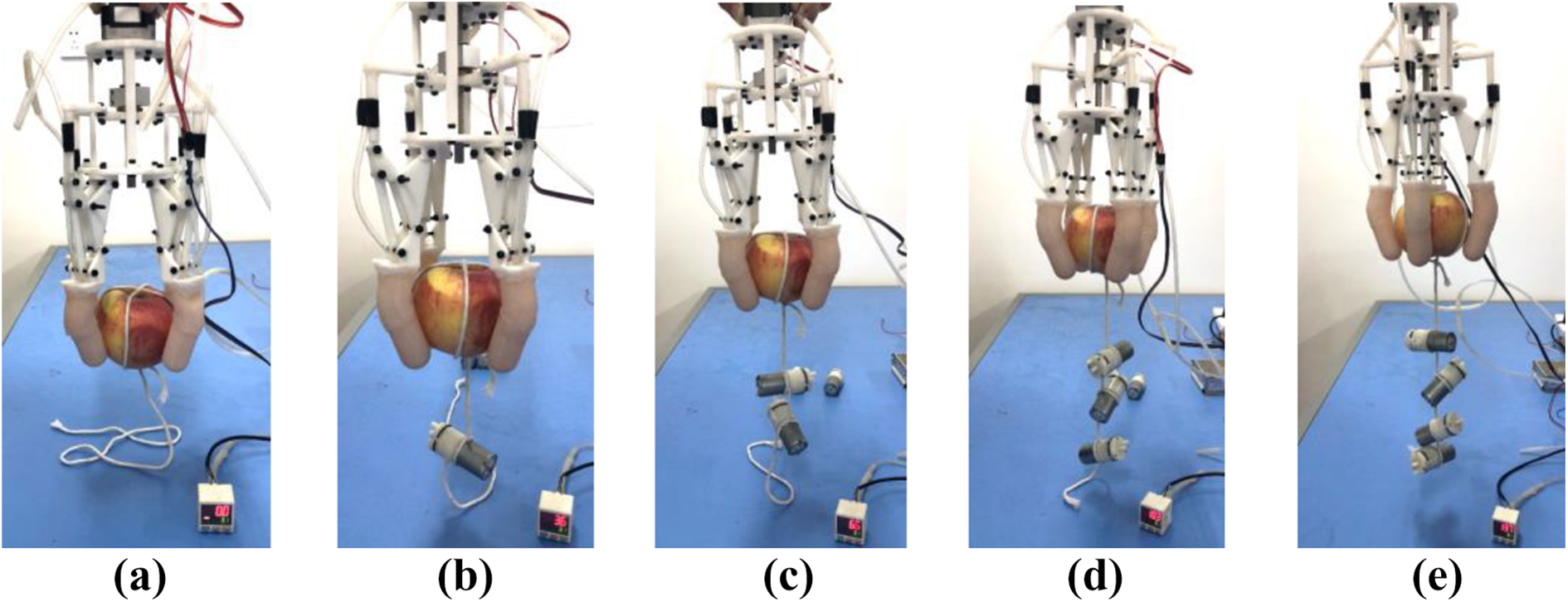
Grasping apple under different weight: (a) test I, (b) test II, (c) test III, (d) test VI, and (e) test V.
Experimental data.

As the air pressure inside the finger increases, the gripping force is improved under the condition that the finger foot is not deformed. Increased finger stiffness can still safely grasp the heavier objects. The driving stroke can also be increased appropriately to provide larger gripping force, and the repeatability can be improved by 5%–10%.
Experiment on gripping different objects
In the experiments, the cylindrical bottle, the horizontal cylindrical automatic pen, the flat spoon, and the flexible watchband were grasped by soft gripper, as shown in Figure 17. Different objects can be grasped by the internal air pressure adjustment or the driving stroke increase.
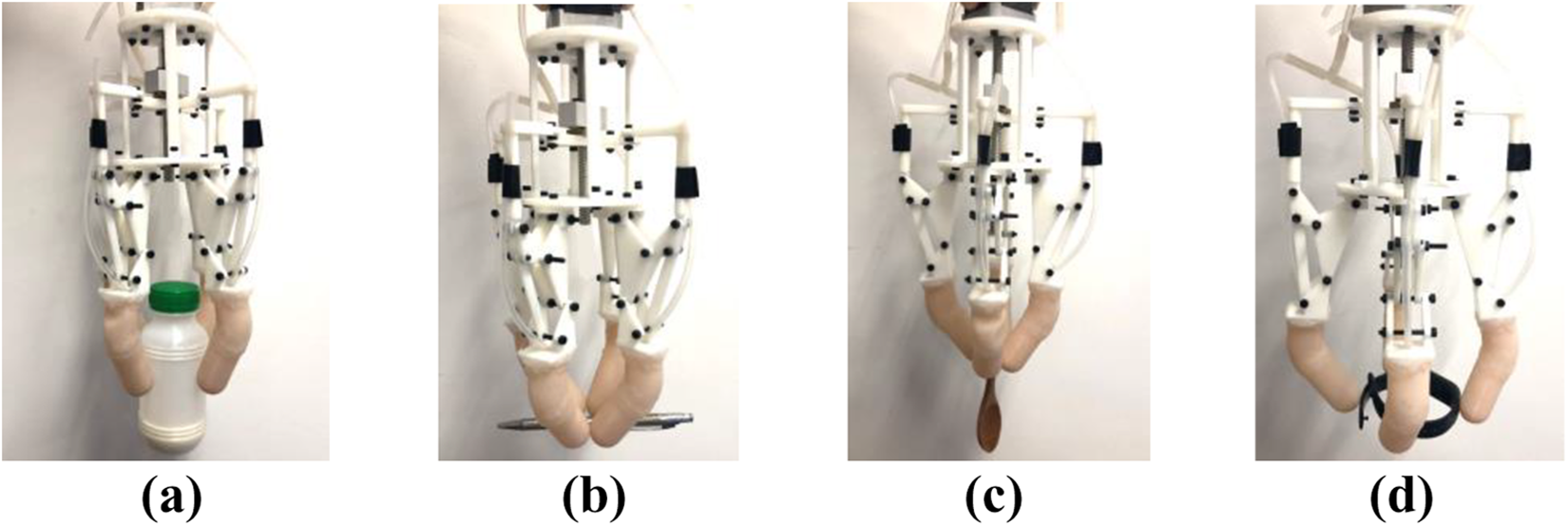
Soft gripper grasp objects of different shapes and weights: (a) cylindrical bottle, (b) cylindrical pen, (c) flat spoon, and (d) flexible watch.
Soft fingers can be used to grasp objects of different shapes. For example, soft gripper can provide greater grasping force to grab milk bottles. The flexible watchband will produce large deformation when the force is applied, and the gripping result indicates the reliability and safety advantages of the soft gripper. Therefore, when grasping a rigid and heavy object, the air pressure of the finger and the driving stroke can be increased. When grasping a flexible or brittle and light object, the internal pressure of the finger can be reduced to complete the grasping progress.
Conclusion
The article researched variable stiffness four-finger soft gripper can successfully grasp a set of objects. Improve the grasping force of the robot on the basis of ensuring that the soft fingers do not have any rigid structure. The gripper utilizes the screw and connecting rod mechanism to complete the grasping trajectory. The motion trajectory, velocity, and acceleration of the fingertip and joints are derived by the D-H model. Solve the problem when the final velocity and position of the traditional soft fingers are unknown. The simulation in ADAMS to verify the grasping force could reach about 1.8 N in this design. The air pressure inside the soft finger can be increased to improve the grasping force. The stiffness of the fingers can be quantitatively increased by feedback from the pneumatic sensor and programmed control to improve grasping reliability. Combining the advantages of rigid and soft robots, this soft gripper can maintain the advantages of soft hands, including increased compliance leading to greater ability to pick up various objects with arbitrary shapes with no need for complicated grasp planning. The grasping force of the soft finger can adjust by the inner air pressure to easily and safely grasp delicate and brittle objects.
In the future work, there is a need to consider the different finger structures such as three-finger gripper to improve grasping ability. The relationship between grasping ability and air pressure will be analyzed in detail. The soft grasping control and strategies will be investigated for improving object adaptability and grasping reliability to adapt to more practical applications.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (no. 51005142), the Innovation Program of Shanghai Municipal Education Commission (no. 14YZ010), and the Natural Science Foundation of Shanghai (nos 14ZR1414900, 19ZR1419300).