
Abstract
Soft robotic grippers with compliance have great superiority in grabbing objects with irregular shape or fragility compared with traditional rigid grippers. The main limitations of such systems are small grasping force resulted from properties of soft actuators and lacking variable stiffness of soft robotic grippers, which prevent them from a larger wide range of applications. This article proposes a shape-memory alloy (SMA)-based soft gripper with variable stiffness composed of three robotic fingers for grasping compliantly at low stiffness and holding robustly at high stiffness. Each robotic finger mainly consisted of stiff parts and two variable stiffness joints is installed on the base with a specific angle. The paraffin as a variable stiffness material in the joint can be heated or cooled to change the stiffness of the robotic fingers. Results of experiments have shown that a single robotic finger can approximately achieve 18-fold stiffness enhancement. Each finger with two joints can actively achieve multiple postures by both changing the corresponding stiffness of joints and actuating the SMA wire. Based on these principles, the gripper can be applied to grasp objects with different shapes and a large range of weights, and the maximum grasping force of the gripper is increased to about 10 times using the variable stiffness joints. The final experiment is conducted to validate variable stiffness of the proposed soft grippers grasping an object.
Introduction
Soft robots composed of soft structures with the potential to exhibit unprecedented adaptation, sensitivity, and agility can achieve safe interactions between human and robot compared with traditional rigid robots. 1 Furthermore, the development of soft robotic grippers is significant in the field of soft robotics. Soft robotic grippers can perform complex tasks in the uncertain environments, where it is difficult for rigid-bodied manipulators to complete flexibly. For example, a soft pneumatic gripper was successfully applied to collect multiple irregular shaped seafood animals of different sizes and stiffness at the bottom of the natural oceanic environment 2 ; a soft pneumatic gripper can recognize the sizes of objects and sort the objects with different sizes 3 ; a soft gripper actuated by ionic polymer–metal composite can manipulate micro object less than 1 mm in diameter and macro-sized object within 10 mm diameter 4 ; a shape-memory alloy (SMA)-based soft gripper can actively achieve multiple postures to grasp objects with deformable shapes and varying shapes with a large range of weight. 5 Usually, soft robotic grippers are actuated by different actuation techniques, for example, pneumatic actuation, 3,6 –8 cable-driven actuation, 9,10 electroactive polymer (EAP, an abbreviation for electroactive polymers, which can change its shape or size in response to electrical stimulation.) actuation, 11 –13 and SMA actuation. 14 –19 Among these methods, pneumatic actuation is unsuitable for applications because the needs for air pumps and valves to produce the compressed gas for power increase the weight and the volume of robotic systems inevitably. And the cable-driven actuation with motor and other appendages has the same limitations. EAP powered by voltage has a small driving force resulting in limitations of a wide range of utilization. However, SMA with high power-to-weight ratio can be easily driven by electrical current via ohmic heating. 17 Meanwhile, due to the merits of low noise, driving voltages, and small size, SMA wires are conveniently integrated with the robotic systems without auxiliary structure and large space for benefiting to optimize resources and costs.
The main challenge of soft robotic grippers as important parts of soft robotic systems interacting with environments and human is that the stiffness of soft robotic grippers cannot be changed a lot during the grasping process. However, variable stiffness is a promising solution to the shortcoming of soft grippers, which can greatly improve grasping performance. In some cases, the soft robotic grippers at low stiffness can effectively buffer external impact for safe interaction during object manipulation in complex environments and be able to adaptively grab irregularly shaped object like fruits. In other cases, in the high stiffness state, the soft robotic grippers can support more loads and maintain their configuration when lifting up heavy objects like bottles. The characteristics have attracted particular attention of researchers in the field of soft robotic grippers with variable stiffness.
A number of different technologies and approaches have been applied to soft robots for variable stiffness, such as particle jamming, 7,20 –23 layer jamming, 24 magnetorheological (MR) or electrorheological (ER) fluid, 25 –27 shape-memory polymer (SMP), 10,28,29 and SMA. 14,30 All these technologies demonstrate excellent performance of variable stiffness in soft robotics. However, the particle jamming and layer jamming require accessional equipment such as pumps to supply the power source resulting in increasing the complexity of hardware systems of robots. MR and ER fluids powered by high voltage to the disadvantage of safe interaction with human. SMP with the variable stiffness property as variable stiffness mechanism of soft robotic grippers cannot grab objects with large weight because, in the glassy, the stiffness of SMP is low. SMA can be an alternative to realize variable stiffness by Joule-heating directly, but it performs a fairly small range of stiffness change and high absolute stiffness.
In this article, we propose a novel soft robotic gripper actuated by SMA wire with variable stiffness mechanism embedded in the robotic finger as the robotic finger joint composed of paraffin, elastomeric membrane, and resistance heating wire. The joint embedded in the robotic finger can achieve the bending deformation and the stiffness change. The paraffin wrapped by elastomeric membrane is heated by embedded resistance heating wire for significantly changeable stiffness of the robotic finger to ensure the soft gripper to be capable of flexible bending deformation at low stiffness and shape keeping at high stiffness, and this variable stiffness joint can be also embedded in other robot systems with compact configurations easily. Hence, the novel joint can be applied to devising and fabricating a soft gripper with features of compliance and safe interaction with environments at low stiffness and providing high force for stable and effective manipulation at high stiffness. The aim of this work is to take advantage of this joint with variable stiffness to the proposed SMA-based soft robotic gripper to enable that it can grab objects with irregular shapes and a wide range of weight steadily and effectively. Due to this characteristic, the soft gripper at low stiffness can adaptively adjust the robotic fingers deformation to grab objects with irregular shape, and then after increasing the stiffness, the soft gripper can keep the deformed shape to steadily lift up objects.
In the rest of this article, we will introduce the design and the fabrication of the proposed soft robotic gripper. An analytical model is established to represent the relationship between the contraction of SMA wire and the bending angle of a single finger. Finally, several experiments are implemented to evaluate the performance of the soft gripper, especially its variable stiffness.
Design and fabrication
Materials
The fundamental design applied in the research is that of a soft gripper actuated by self-activated actuator possessing both flexible-bending deformation and shape-keeping capabilities with two changeable stiffness joints embedded. The schematic diagram of the soft gripper and all its parts is shown in Figure 1.

Concept of the soft robotic finger: (a) design of the soft robotic finger and (b) the cross section of finger revealing the relative position of the joint and the SMA wire. SMA: shape-memory alloy.
There are five different types of materials: SMA wire, paraffin, nickel–chromium (Ni-Cr) wire, silicone rubber, and polylactic acid (PLA) to be used for fabricating the soft robotic gripper. The SMA wire (55 wt% Ni, 45 wt% Ti, Flexinol, Dynalloy) with the diameter of 0.38 mm and the austenite start temperature (As ) of 68°C is used as a tendon to drive the soft gripper to generate bending deformation due to its high power-to-weight ratio, large life cycles, low noise, and low driving voltages. 31,32 The paraffin as a variable stiffness material is selected to modulate the stiffness of the embedded variable stiffness joint due to the large range of stiffness change between its liquid and solid states, easy fabrication of the variable stiffness joint by molding method and its nontoxicity. The transformation temperature of the paraffin is its melting point (Tm ) of 58°C. At ambient temperature (25°C), the paraffin at solid state is stiff corresponding to the robotic finger joint at high stiffness. When reaching its Tm , the paraffin at liquid state is significantly soft corresponding to the robotic finger joint at low stiffness. Ni-Cr wire (80 wt% Ni and 20 wt% Cr) with a diameter of 0.5 mm embedded in the joint is used to heat the paraffin to reach its Tm for changing the paraffin from solid state to liquid state. The silicone rubber material called Dragon Skin FX-Pro (Smooth-on, Inc., Pennsylvania, Macungie. USA) is used to manufacture the elastomeric membrane for encasing the paraffin to prevent it from leaking. Moreover, the elastomeric membrane with small elastic recovery force can return the joint to its original shape without external force during the paraffin in liquid state. And the joint also can keep its shape whenever external forces act on the gripper during the paraffin in solid state. Due to the softness and large friction coefficient of the silicone rubber material, 33 it is affixed to the surface of the end of the robotic finger to mimic hand skin to increase the grasping force. PLA is used for fabricating the stiff components and molds for making elastomeric membrane by 3D printing technology. All the materials mentioned above are easily available and their main characteristics are presented in Table 1.
Properties of main materials.

SMA: shape-memory alloy; Ni: nickel; Cr: chromium.
Design
The robotic finger of the proposed soft gripper is designed to be a rectangular shape with two variable stiffness joints, as shown in Figure 1(a). Each variable stiffness joint with 55 mm in length, 20 mm in width, and 20 mm in thickness is embedded into the stiff parts to fix the position avoiding the relative slide between the joint and the stiff parts. The joint close to the fingertip is referred to as joint-1 and another is referred to as joint-2. And the stiff parts of the robotic finger are referred to as human phalanges and metacarpals. Two joints are placed in the stiff parts in parallel to the SMA wire and the relative positions of SMA and joints are shown in Figure 1(b).
At ambient temperature, the paraffin is in the solid state corresponding to the joint stiff and inflexible to enable the robotic finger to sustain external loads, and then increasing the temperature of the paraffin by applying a voltage of 10 V to the Ni-Cr wire, the paraffin will change to liquid state and the joint will become soft and compliant. Furthermore, the stiffness of each joint can be varied separately by activation of the correlative Ni-Cr wire. During the joint at low stiffness, heating the SMA wire by electric voltage of 6 V causes its temperature to achieve its Af , and the SMA wire can start to contract so that the SMA wire will drive the robotic finger to produce a large bending moment on the joints. Then continuously applying the voltage to the actuated SMA wire is used to maintain the deformation of the robotic finger until the softened paraffin changes back from liquid to solid state. Afterward, the robotic finger will retain the deformed postures with high stiffness. After the stiffness of the joint decreases again, due to the elastic recovery force of the elastomeric membrane, the robotic finger can be resorted to its original straight configuration without actuating SMA wire.
The sizes of objects are determined by the installation position of the robotic fingers. As shown in Figure 2(a), it is desirable to install the robotic fingers on the base with a specific angle. Figure 2(b) shows the largest and smallest grabbing sizes to enable stable grasping. We assume that the assembly angle between the robotic fingers and the base is


Gripper configuration: (a) diagram of the proposed gripper, (b) gripping volume of the gripper, and (c) bending motion of a single joint.
However, the maximum grasping radius R is not only limited by the length of the robotic finger L and the assembly angle

where L is the length of the finger and l 2 is the length of the joint.
Models of SMA and joint dynamics
The SMA wire is heated by electric voltage and cooled by natural air. The heat transfer model of SMA wire is formulated as follows 34

where
SMA has a hysteresis thermal behavior, which leads to different phase transformation equations for heating and cooling. The heating equation (martensite to austenite phase transformation) can be formulated as follows 35

Moreover, the related cooling equation (austenite to martensite phase transformation) is as follows

In equations (4) and (5), the subscript “M” stands for the martensite phase, and the subscript “A” stands for the austenite phase, respectively.

where


where

where

When the robotic gripper bends, we can assume the joint as cantilever beam, as shown in Figure 3(a). If one joint bends, deflection of the joint can be expressed as follows:

where w is the deflection of the joint, M is the bending moment acting on the joint, l 2 is the length of the joint, Es is the elastic modulus of the joint, and Is is the moment of inertia.

The model of the robotic finger: (a) the beam model of the robotic finger and (b) the kinematic model of the joint.
The bending moment is generated by SMA wire, which is expressed as follows


where y is the moment of SMA wire,
Therefore, from the above equation, we can build the relationship between t 1 and w as follows:



The paraffin is heated by internal Ni-Cr wire, and the heat transfer model of Ni-Cr wire is expressed as follows

where
The heat of the paraffin is calculated by

where Qp
is the heat absorbed by Ni-Cr wire, cp
is the specific heat of the paraffin, mp
is the quality of the paraffin, Tp
is the temperature of the paraffin, and

Therefore, the response time of grasping t can be expressed by

And it is necessary to establish the kinematics of the robotic finger for the analysis of the bending angle of the robotic finger. During joint in the low stiffness, the joint can generate bending deformation by heating the SMA wire. As shown in Figure 3(b), we can assume the joint as cantilever beam and generate circular arc bending. When a joint bends, according to geometric relationship, the deflection of the joint can be expressed by


where α is the bending angle of the joint and n is the shrinkage of the SMA wire.
The joint can be assumed as a cantilever beam, and in the condition of ignoring gravity, the deflection of the joint can be calculated by equations (11) and (12). Therefore, from equations (11), (12), (21), and (22),

The geometrical dimension of the gripper can affect its grasping performance, therefore, when we definite geometry size of the gripper, some points should be taken into consideration as follows: The overall dimensions of the proposed robotic finger should approximate to the human finger as a bioinspired robotic finger. Thus, recent research on bioinspired robotic hands should be referred to before setting the prototype dimension. The length of the joint needs to be reasonable for the joint bending. Therefore, parameter l
2 should not be designed too small. The maximum bending angle of the joint
With the considerations mentioned above, we design the overall dimensions of the robotic finger, which are 120 mm in length, 20 mm in width, and 30 mm in thickness. Parameters setting of
Fabrication
The proposed soft gripper consists of three robotic fingers with variable stiffness and high compliance. A robotic finger has two components: the variable stiffness joint and the stiff parts. The soft gripper is basically manufactured by five different types of materials: SMA wire, paraffin, Ni-Cr wire, silicone rubber, and PLA. The actuation part adopts SMA wire, inspired by related works. 14,15,36 The variable stiffness joint as an important part of the robotic finger is fabricated by the silicone rubber, the paraffin, and Ni-Cr wires. The stiffness of the joint can be changed by heating Ni-Cr wire embedded in the paraffin or natural cooling the paraffin. The stiff part fabricated by PLA is used to connect with the joint and as the base. Three robotic fingers are installed on the base with a specific angle, as depicted in Figure 2.
The manufacturing of the soft gripper can be accomplished quickly by 3D printing and shape deposition manufacturing technologies, which are straightforward and can be illustrated in Figure 4. Briefly, the fabrication procedure of a single robotic finger contains
Casting the lower part of the elastomeric membrane of 2 mm thickness by using a semi-closed two-part mold, as shown in Figure 4(a). All molds are fabricated by the 3D printer (Creator-Pro, Flashforge Inc., Zhejiang, China) with 1.75-mm diameter PLA.
Making the Ni-Cr wire into the coil to embed it in the middle of the elastomeric membrane and pouring the liquid paraffin into the elastomeric membrane. It is necessary to ensure the liquid paraffin not to overflow, as shown in Figure 4(b).
Pouring the silicone rubber on the paraffin as upper part of the elastomeric membrane for seal after the paraffin cooling to solid state, as shown in Figure 4(c). Then, a joint is made by preceding steps.
Assembling the joint and stiff parts made by 3D printing together, and embedding SMA wire into the finger, as shown in Figure 4(d).
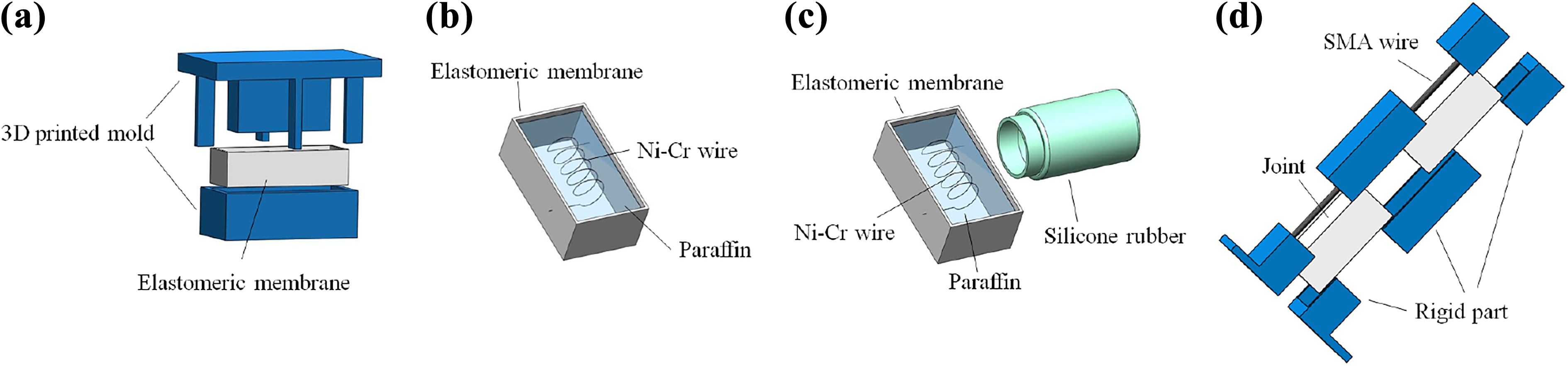
Fabricating process of a robotic finger: (a) molding the lower part of the elastomeric membrane, (b) embedding the Ni-Cr wire and pouring the paraffin, (c) sealing, and (d) assembling. Ni: nickel; Cr: chromium.
Experiment and analysis
Variable stiffness performance
The state of the paraffin can be changed by heating or cooling the paraffin to achieve variable stiffness of the joint. At ambient temperature(25°C) to determine the time of heating and cooling the paraffin, the voltage of 10 V for the variable stiffness joint is applied to the Ni-Cr wire for heating the paraffin to its Tf to change the paraffin from solid state to liquid state resulting in significant decrease of the joint stiffness. And then, after naturally cooling, the joint transfers back to high stiffness. The infrared thermometer is used for detecting the paraffin temperature with an interval of 10 s and the result is shown in Figure 5. From Figure 5, we can see that the temperature of the paraffin rises rapidly and it takes about 70 s to achieve its melting point temperature of 58°C to ensure that the state of the paraffin is transformed from solid state to liquid state, and cooling time of 380 s is needed for the paraffin back to solid state to confirm the joint is changed back to high stiffness.

Temperature variation of heating and cooling the paraffin.
Then, we test the stiffness variation of the single finger. As we all know, our hand become rigid or soft and compliant by the stiffness change of muscles around finger joints. This feature enables us to grab lightweight objects avoiding force peak and uncertain impulse to ensure safe interaction and hold heavier objects effectively and reliably. It is also desirable that the gripper can move flexibly and adapt the complex environments at low stiffness and increase stiffness to apply force or lift heavy objects when needed, like human hands, such as bidirectional antagonistic variable stiffness (BAVS) joint of the deutsches zentrum für Luft- und raumfahrt (DLR) hand, 37,38 the variable stiffness device made by silicone rubber, 39 and the variable stiffness mechanism using two motors. 40
Stiffness represents a material or structure to resist elastic deformation when subjected to external forces. In this research, we describe stiffness as the displacement X by external force F acting on the fingertip. The external force is in the same plane as the robotic finger bending, as shown in Figure 6. We will record two sets of data of the robotic finger at low stiffness and high stiffness.

Experimental principle of testing the finger stiffness performance.
The experimental setup is shown in Figure 7. A pulling cord connects the fingertip with a tension–compression force sensor (DYLY-103, Bengbu Da Yang Sensing System Engineering Co., Ltd, China). The range of the force sensor is 0–50 N and the comprehensive error of the force sensor is 0.03% FS. The root of the robotic finger is fixed on foundation. A voltage is applied to Ni-Cr wire to heat the paraffin to change the stiffness of the robotic finger. Before every experiment, the pulling cord should be pretensioned in a small range to ensure it straight and tight. The force sensor should be moved away from the finger along with the screw linear guide slowly. In this experiment, the maximum horizontal displacement of the force sensor is set at 10 mm with an interval of 1 mm. According to the measured data, we fitted data points to obtain an approximation of the stiffness of the robotic finger.

Experimental setup for measuring finger stiffness performance.
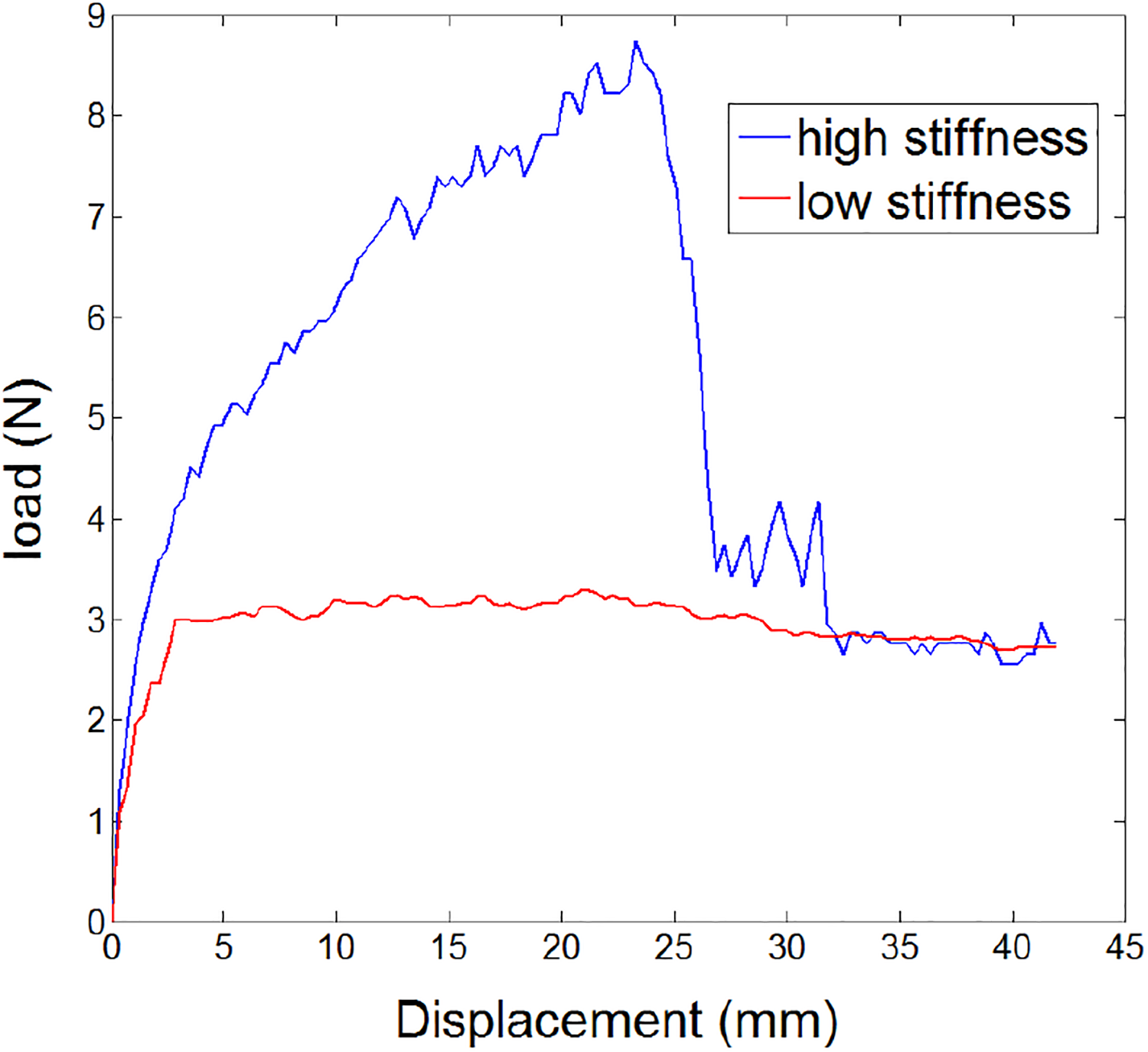
Figure 8 shows the relationship of F versus X, and the slope of curve represents the stiffness of the robotic finger by the definition of stiffness. Therefore, the larger the slope, the higher is the stiffness of the finger. The maximum force at high stiffness is 2.21 N and the maximum force at low stiffness is 0.14 N at the allowable displacement. The stiffness of the finger K 1 is 0.2431 N/mm at high stiffness and K 2 is 0.0136 N/mm at low stiffness, which corresponds to a ratio of 18 times. Therefore, the proposed design of variable stiffness can enable the robotic finger to have the characteristic of a larger range of stiffness change.

Result of force versus displacement at high stiffness and at low stiffness.
Maximum grasping force
To compare the grasping ability of the gripper at high stiffness and low stiffness, an experiment is conducted to test the force engendered by the gripper grabbing an object fixed on experiment platform during an upward motion. Before testing, the gripper is actuated to grab a fixed cylinder with a diameter of 85 mm, as shown in Figure 9. Then, the gripper is raised up vertically without interference. From grasping objects to separation from objects, the vertical moving distance of the gripper is 42 mm and the vertical pulling force generated by the soft gripper is shown in Figure 8. During the experiment, by observation, it can be found that at low stiffness, the gripper can adapt the shape of the fixed object to grasp compliantly. The grasping mode of the gripper is changing from wrapping grasping to pinching grasping depending on the changing situations. The pulling force increases slowly, and then, it undergoes a smooth decrease process. However, at high stiffness, the gripper cannot adjust itself the posture to adapt the changing situations, and the gripper preserved its configuration during the whole grasping process. The pulling force at high stiffness increased sharply, and it decreased abruptly after fingertip exceeded the middle of the fixed cylinder.

Experimental setup for maximum grasping force.
In Figure 10, results show that the maximum pulling forces are 3.28 N at low stiffness and 8.73 N at high stiffness, corresponding to a ratio of three times. From another aspect, we can generally believe that the ability of resisting external force is better if the pulling force is large. The pulling force stays at 2.71 N stably, which can be regarded as the weight of soft gripper approximately. Approximately, the grasping force is the difference between pulling force and the weight of the soft gripper. Therefore, the grasping forces are 0.57 N at low stiffness and 5.66 N at high stiffness, corresponding to a ratio of 10 times.
Pulling force of the gripper.
Grasping performance
In this research, the multifold deformed configurations of the soft finger can be achieved actively from the actuation of SMA wire by sequentially changing the stiffness of the joints. Applying a voltage to SMA wire results in increasing the temperature of the SMA wire through Joule heating to reach its As , and then, SMA wire starts to contract, causing the robotic finger to produce bending deformation concentrated on the low-stiffness joint. Each robotic finger is capable of maintaining four configurations: straight, joint-1 bending, joint-2 bending, joint-1 and joint-2 simultaneous bending. Then, each robotic finger composed of two variable stiffness joints is capable of deforming into many postures of increased complexity and maintaining those postures. Figure 11(a) shows the original straight configuration of the robotic finger. Figure 11(b) to (d) shows the bending deformation of a single joint and both of the two joints at low stiffness by actuating SMA wire.
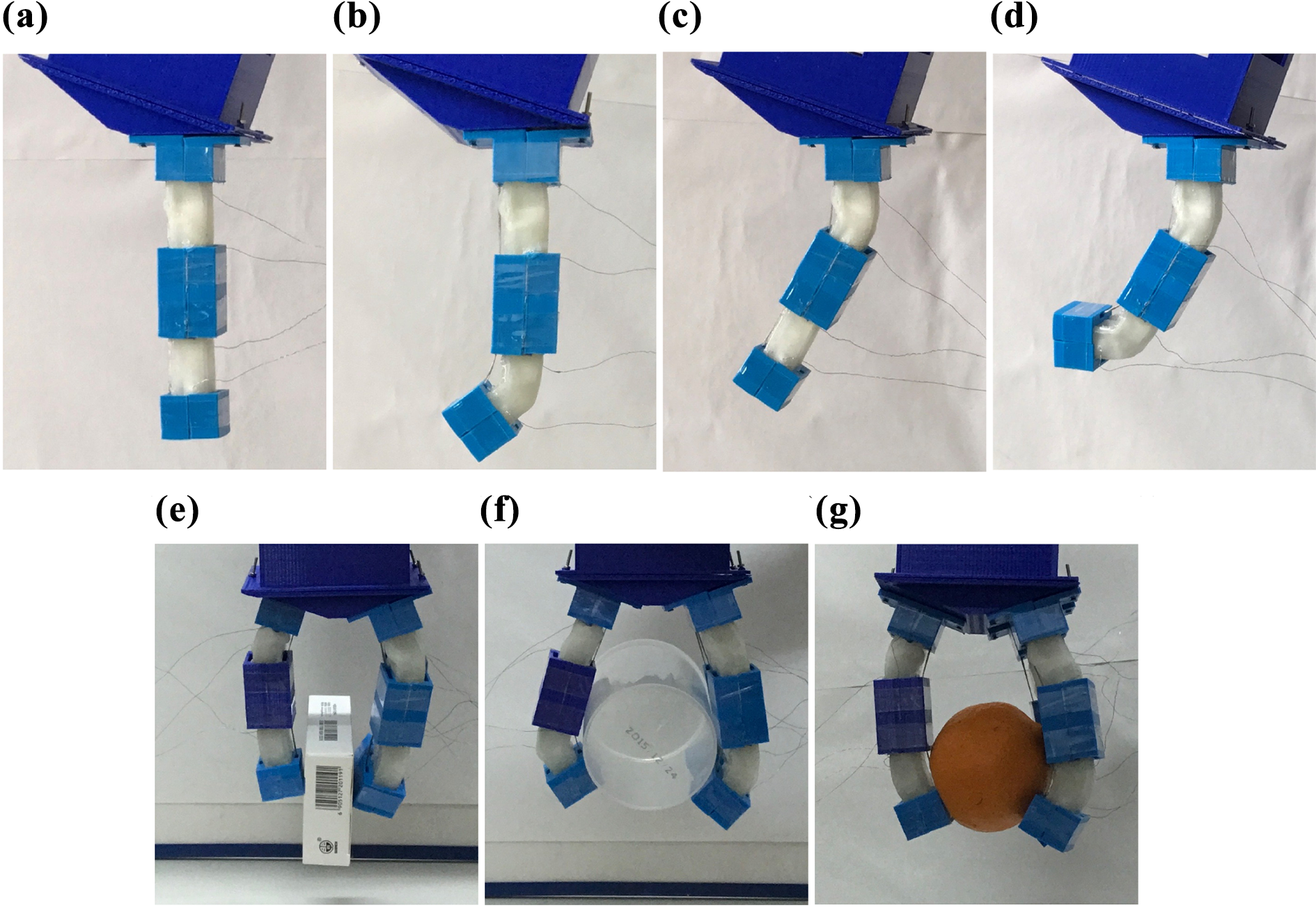
(a to d) Four different configurations of one robotic finger. (e to g) Grasping different objects.
The proposed gripper can flexibly morph and actively change stiffness in one compact design to mimic human grasping to grip a wide variety of objects. Because the stiffness of each joint can be changed independently, grasping strategy for the gripper varies by actuating SMA wires and changing the stiffness of the corresponding joint. First, the soft gripper is used to lift up square box. The gripper picks up the square box by actuating joint-2 to adapt the shape without slipping, as shown in Figure 11(e). Figure 11(f) presents the grasping a cylinder with smooth thin wall by actuating joint-1. We found that the soft gripper could hold the cylinder effectively. Finally, we tried the proposed gripper to grasp an orange. We could actuate joint-1 and joint-2 simultaneously to grab the orange easily, as shown in Figure 11(g). Therefore, we can demonstrate that the soft gripper can grasp objects with different shapes by actuating joints independently.
Through the experimental analysis above, we find that the proposed gripper has the merit of variable stiffness in a large range. However, in the actual grasping process, the characteristic of variable stiffness needs to be further validated. And it is shown in Figure 12, the first experiment is that the soft gripper attempts to grab a bottle of water weighing 500 g, which is heavy for most soft grippers. Figure 12(a) shows the initial posture of the soft gripper. At first, the paraffin is heated to the liquid state for the gripper being at low stiffness, and then, the gripper can be easily actuated by heating SMA wire to perform grasping operation, as in Figure 12(b). When we stopped heating the SMA wire, the bottle falls as in Figure 12(c). This is because the paraffin is still in the liquid state, and the grasping force of the gripper is small. In the next experiment as in Figure 12(d), when the gripper is at low stiffness, it is actuated to grab the same bottle. In Figure 12(e), the paraffin is cooled down to ensure that the gripper is at high stiffness. The voltage applied to SMA is turned off. By observation, we find that the bottle cannot drop down even without actuating SMA wire, because at high stiffness, the gripper with a high grasping force can keep original posture. Subsequently, the paraffin is heated again, three fingers returned to their original postures to drop the bottle slowly. The experiment shows that the proposed gripper is easy to be actuated to grab objects at low stiffness and it can maintain the posture to grab heavy objects stably and effectively at high stiffness.

Demonstration of variable stiffness grasping: (a) gripper without actuation, (b) grasping a bottle at low stiffness, (c) failing to grasp bottle, (d) grasping a bottle at high stiffness, and (e) successful grasping and holding tight.
Conclusion
In this article, we have proposed an SMA-based soft robotic gripper with variable stiffness, which has the capability of adaptive and robust grasping objects. The soft gripper composed of three robotic fingers is fabricated by embedding the variable stiffness joints into the stiff parts to enable it to be capable of both soft morphing and shape retentions. The paraffin provides a novel method of a large range of variable stiffness for the soft robotic gripper. At low stiffness, the soft gripper can be easily actuated with high flexibility and compliance. At high stiffness, the soft gripper can keep postures firmly and stable to grasp heavy objects in spite of external disturbance. Therefore, there are two main features of the robotic finger: one is that the stiffness of the soft gripper can be changed significantly and another is that the robotic finger can vary its postures by changing the stiffness of the desired joint and actuating the SMA wires sequentially. Besides, the fabricating procedure of the proposed gripper based on 3D printing and shape deposition manufacturing technologies is fast, simple, and convenient. According to demand, the gripper can be easily customized to different sizes. The bending and stiffness characteristics of the robotic finger can also be tailored by modifying the dimension of the joint. From the energy consumption, due to the high power-to-weight ratio of SMA and direct heating to the variable stiffness joints with less energy dissipation, the proposed gripper can improve energy efficiency and reduce energy consumption. Based on the above advantages, the proposed soft robotic gripper exhibits a promising prospect in a wide range of applications of service robot.
From experimental results, the stiffness of the proposed finger decreases along with the temperature rising of the paraffin. The time of changing the state of the finger from high stiffness to low stiffness was demonstrated as 70 s, and the time of the reverse process was demonstrated as 380 s. The stiffness of the finger are 0.24 N/mm at high stiffness and 0.01 N/mm at low stiffness, respectively, corresponding to a ratio of 18-fold. Three robotic fingers are installed in the base to fabricate the soft gripper to grab a fixed object, where, at high stiffness, the maximum grasping force is about 10 times larger than that at low stiffness.
The proposed soft gripper based on the integration of versatile parts provides a novel approach for grasping of soft manipulators to enable them to be more compliant and effective for different grasping operations. Using SMA for actuation is based on the fact that it can be designed and fabricated in compact robot systems, and the choice of paraffin for changing the stiffness is motivated by its large range of stiffness. Besides, the limitation of the proposed design that may affect its manipulation is a long time for changing the joint from low stiffness to high stiffness increasing the time of grasping objects. The problem will be considered and solved by optimization and experiment to shorten the time of changing the stiffness effectively.
Footnotes
Acknowledgements
The support of WZ (processing data), ZZ (structural design and result analysis), and LH (technical guidance and reviewed this manuscript) is acknowledged. In addition, the authors would also like to sincerely thank the editors and reviewers for their pertinent comments and guidance that helped this article become more professional and precise.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under grant no. 61573093.