
Abstract
Nowadays, there is a growing demand for versatile robotic grippers that facilitate adaptive grasping across a range of objects, characterized by diverse attributes such as shapes, sizes, and mechanical properties. This research introduces a new soft gripper, denoted as
1. Introduction
Robotic grippers have been widely involved in many industrial activities, primarily for pick-and-place tasks according to Navas et al. (2024), including manufacturing, packaging, and logistics. Recently, the characteristics of gripping-receiving subjects have become more diverse, encompassing a range of morphological aspects, such as geometric and physical properties (e.g., softness), along with various technical requirements tailored to application sectors. This background brings in a great deal of research related to the development of robotic hand/grippers with various mechanisms, starting from typical two-jaw parallel grippers to anthropomorphic ones mimicking human hands to achieve delicate manipulation (Shintake et al., 2018). Recently, with the increasing demand for handling soft and fragile objects, such as in the food industry (Navas et al., 2024 Liu et al., 2023), soft grippers stand out as a compelling solution thanks to the advancement of soft material and large-deformation structures.
In addition to ongoing efforts to introduce compliant touch interfaces into rigid grippers and novel designs for soft grippers, researchers are also seeking innovative grasping strategies under the presence of uncertainty or with complex subject geometries. The common approach is employing machine learning techniques with the incorporation of either internal (Elgeneidy et al., 2018; Jamil et al., 2021) or external sensory feedback (Zhao et al., 2016) to explore the actuation planning for successful grasping. However, data hungriness always poses a challenge to the generalizability of the final device in actual operation. In addition, integrating a sensory system into the soft body often requires substantial design efforts, which usually end up with sophisticated fabrication procedures (Ho and Hirai, 2017). On the other hand, natural creatures give hints on numerous gripping phenomena for robotic grippers, such as human hands (with articulated fingers (Bhatt et al., 2021) and palm (Wang et al., 2021)), plans (flower petals (Zhang et al., 2022b)) or animals (octopus tentacles (Wu et al. (2022a)), elephant trunks (Li et al., 2018), and so on). Lately, inspired by the concept of Embodied Intelligence, an alternative approach has drawn attention from the community that leverages the extensive deformability of the complaint bodies at multiple scales toward universal handling of objects (Brown et al., 2010). In other words, the high complex grasping-control burden will be offloaded to the morphological features and its passive mechanics during interaction with the environment.
In this article, we introduce From left to right, top to bottom: ROSE gripper on a robot arm picking a coffee can in experiment and simulation. The maximum lifting force that ROSE can endure is 327.8 N, in a strength test.
In this study, our first objective is to elaborate quantitatively and qualitatively the Wrinkling of ROSE. We hypothesize that the relationship between morphological features (including geometrical variables and material properties) and inward folding plays a critical role. Such correlation will be studied via a FEM-based (Finite Element Method) simulation tool. This allows us to reproduce the ROSE’s sophisticated transformation under the variation of morphological inputs. Yet, an experimental demonstration of this ROSE’s version showcases its potential in crop handling and fruit harvesting applications.
2. Related works
2.1. Finger-styled soft grippers
This class of soft grippers is mainly motivated by the human hand paradigm where finger-shaped units surround the central block. These fingers are driven either individually or simultaneously to approach and manipulate objects.
Of the many approaches, fluidic-based soft actuators (FSA) are considered the most widespread actuation principle for the fingers. Technically, the fingers enclose the respective objects for grasping due to the inflation (either by positive or negative pressure) of the fluid-containing cavity, which is usually a chambered structure. The desired deformation (e.g., bending, twisting, or extension) can be pre-programmed by the inclusion of reinforcing elements (e.g., inextensible fibers) or through the strain mismatch between layers of a composite structure. A well-known representative of this class is PneuNets, which was initiated in 2011 (Ilievski et al., 2011). Following this early prototype, researchers have introduced similar variations regarding geometrical configurations, intelligent materials, and control methods for the past 10 years. For example, self-healing soft materials endow soft pneumatic grippers with the resilient capability to quickly regain grasping functionality. Recent advancements in additive manufacturing technologies enable the one-shot design and fabrication of such devices (Lalegani Dezaki et al., 2023). Attempting to get rid of bulky air compressors, researchers (Wu et al., 2022b) make use of the volume reduction of a soft origami structure to supply compressed air for pneumatic grippers. Regardless of the potential in various application fields, there still exist disadvantages inhibiting FEA-based grippers in actual scenes. The primary concern is the discontinuous contact spaces induced by the fingers. Furthermore, these soft actuators provide a limited load capacity and precision in manipulation tasks requiring fine control or positioning.
Rather than pneumatic actuation, the motor is a popular method to transmit motion to soft bodies via various mechanical components such as tendons (Zhang et al., 2022a) or gears (Shin et al., 2021). Regarding tendon-driven mechanisms, this approach retains mechanical robustness thanks to the absence of active elements within the soft body, yet still performs smooth gripping motions. The structural integrity also facilitates the integration of various sensory systems (Qiu et al., 2023). Although this class of grippers can offer a high payload, concerns persist regarding their long-term durability, especially in areas anchored by the cables. Friction between cables and the guide waves can introduce losses in energy-consuming or damage the system in high-frequency applications. A soft gripper called Fin Ray employs motors and a gearbox as the actuation unit (Crooks et al., 2016). Driving a Fin Ray gripper against an object will cause the bending of its crossed beams to form a suitable contact interface. Thanks to this principle, objects with irregular shapes might not be compatible with this gripper. The high reaction force generated may exceed the mechanical resistance of soft objects.
Soft grippers are considered proper testbeds to deliver proof-of-concept for novel actuation technologies in numerous applications. Besides stimuli from mechanical systems mentioned above, elastomers could be deformed to the desired state in response to electric excitation (i.e., elec-troactive polymers), thermal change, or chemical reactions. A hybrid prototype, which combines more than one above actuation method, shows great promise in minimizing the complexity of the mechanical system. For instance, authors in Lee et al. (2019) employ shape memory alloys (SMAs) to pull the cable instead of relying on rotary motors or even playing the tendon role (Simone et al., 2017). Utilization of biodegradable soft materials for the development of environment-friendly soft actuators powered by fluctuations in the ambient conditions (e.g., humidity) recently gained much attention from the community (Keller et al., 2023).
Regardless of the actuation method, to accommodate the spatial location and pose of the object for high-level manipulation skills, the motion trajectory of each finger should be adaptively generated. This requirement, combined with the non-linearity and hysteresis of soft materials, altogether hinders the utilization of model-based control algorithms. Exploiting data-driven methods as an alternative solution must address the necessity for large data volume generation and results are notoriously difficult to generalize.
2.2. Shape-morphing soft grippers
This class of grippers undergoes significant deformation, whether responding to external stimulation environments or as part of their active system, for adaptive grasping.
The representative for this class is granular jamming grippers (Brown et al., 2010). In principle, such grippers allow objects to be comfortably enveloped inside a soft palm stuffed with small particles. Then, the air depressurization of the palm will lock the contact interfaces to hold various types of objects firmly. However, the jamming gripper needs to press against the object strongly enough to form essential contact, thus it may harm the soft, fragile objects. Similarly, Li et al., introduced a hollow hemispherical-shaped gripper that can radially contract the body, thanks to the origami structure, to envelope the object (Li et al., 2019). In addition to the pneumatic negative pressure (vacuum mode) for the closing pattern, researchers in Hao et al. (2021) extend the diversity of the grasping capability by incorporating the expanding pattern (positive pressure) for a cylinder-shaped soft clamper. Zhu et al. leverages a cable-driven mechanism to pull the palm’s soft membrane inward, leading to the embrace of the objects (Zhu et al., 2016).
Natural creatures exhibit delicate object picking and manipulation using their highly flexible, lengthy body parts, such as elephant trunks or octopus tentacles. These biological samples have inspired soft robotic grippers as potential engineered solutions for structural designs and novel grasping strategies. Instead of coping with the control challenges related to adaptive grasping researchers in Becker et al. (2022) rely on the entanglement of soft tentacle-like actuators. By greatly curling them, a series of stochastic knotting links are created among actuators-objects and actuators themselves to trap the object inside the chaotic space. This strategy exhibits remarkable versatility and adaptability in grasping and securing diverse objects. However, the repeatability of this device is questionable, especially in releasing mode due to undesirable interlocking among tentacles making it unsuitable for accurate pick-and-place applications.
In summary, adaptive grasping allows grippers to conform to the morphological and mechanical complexities of target objects with minimal planning and perception feedback control. In this scenario, ROSE offers universal gripping to any object within the hollow region by triggering the buckling deformation of the soft shell body with one rotation.
2.3. Expected contributions
In our previous paper (Bui et al., 2023), we have introduced the general structure of ROSE at various scales, its operational principle, and preliminary results related to mechanical robustness as well as its potential in adaptive grasping. Aiming to elaborate comprehensively on the underlying mechanics for the emergence of ROSE’s grasping pattern, this work presents the following contributions: 1. Proposal of a design and feasible fabrication methods of ROSE - a novel soft gripper functioned through the buckling deformation under rotation actuation. 2. A detailed non-linear analysis of the soft shell body transition from the rest to the closing state via a FEM-based simulation engine (ABAQUS software). As a result, the impact of morphological attributes (geometrical and material properties) on the overall grasping performance is revealed. 3. Practical showcases to highlight the potential of ROSE in challenging applications such as crop harvesting.
3. ROSE: Rotation-based squeezing robotic gripper
3.1. Idea, design, and working principle
ROSE gripper takes a hint from the blooming state of flowers (such as roses), in which the opening state resembles a fully bloomed rose, while the closing state is respective to a sleeping rose (in dormancy), even though there is no explicit mimicking here. ROSE is an isolated cup-shaped chamber formed by two soft shells which are generally constructed based on three main primary variables thickness t, body’s height h, and radius r, as shown in Figure 2(a). In which, three thickness configurations will be considered: constant thickness (Figure 2aI), first-order distribution (Figure 2aII), and second-order distribution (Figure 2aIII). Further characterization will be presented in the remainder of this work. The close/open operation is implemented by a chain of complex buckling deformation of a membrane under a twist-action provided by an external motor (see illustration in Figure 2). The grasping procedure follows three steps: Approaching, Lifting, and Holding as shown in Figure 2. First, ROSE approaches the object (see Figure 2(b)) and makes sure the object is within the petal. Next, the central cylindrical base rotates to the rotation angles θ at a rotational speed ω leading to the buckling of the skin, gradually embracing the object (see Figure 2(c)). When the base keeps rotating, it increases the contact area and the applied pressure on the object’s surface. Therefore, the generated gripping force on the object’s surface would grow, which in turn helps ROSE squeeze the object firmly (see Figure 2(d)). Note that θ and ω of steps 2 and 3 could be adjusted to adapt to the gripping objects’ size, shape, and weight. ROSE’s gripping process through three main steps: approaching, lifting, and holding an object, respectively.
To facilitate the planned morphology study, it is necessary to parameterize the soft body of ROSE into key variables so that their variation significantly affects the grasping ability. Here, thickness t is not counted for the bottom sheet of inner and outer layers (fixed at 2 mm). Additionally, in this study, radius r will be fixed at 50 mm to remain the size of the gripped object. Instead, the contribution of r will be coupled with the height h via their ratio r/h.
3.2. Prototype fabrication procedure
The feature that the fabrication method must deliver to the final product is the symmetry of the ROSE body.
In this section, we introduced two fabrication methods for ROSE. One could choose an appropriate method based on the pros and cons of each. Generally, both approaches follow a 3-step procedure (see Figure 3) including: Step 1: Mold design and fabrication, Step 2: Mold assembly and material applying/injection, Step 3: Demolding. Illustration of two fabrication procedures for ROSE soft skin following three basic steps: Step 1 - Mold design and fabrication; Step 2 - Mold assembly and material injection; Step 3 - Demolding.
The first one is a fabrication method wherein raw silicon rubber material (Dragon Skin 30, Smooth-On, USA) is poured onto a core mold (see illustration in Figure 3). Then, the liquid stream slowly flows down covering the whole mold’s surface to create a symmetrical, thin sheet of soft body, that is, ROSE gripper. This method exhibits several issues, including substantial generation of waste material and unsuitable for mass production. In fact, the process leaves completely no control over the resulting geometry, and the consistency among prototypes remains questionable. On the other side, this method is simple, and the mold-making is less expensive.
The second approach is basically a casting process. To be compatible with the thin shell body of ROSE, we used a high-pressure die-casting process called compressing molding. The step-by-step fabrication procedure is illustrated in Figure 3. The mold constitutes two separate parts (Part I and Part II) creating a closed cavity. Each main body part is further segmented into sub-pieces for easy assembly and demold purposes. Note that Part II contains several holes allocated on the top surface serving as outlets for discharging initial air within the cavity and bubbles present in the silicon rubber. The material overflowing through these outlets also implies the cavity has been completely occupied. The molding process starts by pouring raw material into the interior of Part II. Next, Part I will be slowly pressed downward until the cone-shaped mating surfaces meet, as depicted in Figure 3. Finally, two parts are tightly fastened together using bolted joints. Note that the volume of raw material is intentionally over-calculated to ensure complete fulfillment of the mold cavity. This fabrication method ensures the material, under high-pressure, is filled into a highly difficult-to-fill mold. Other advantages include tight tolerance, geometrical repeatability, higher material-to-product rate, and suitability for mass production at industry scales. However, to ensure the symmetry and accuracy of the ROSE geometry, each mold piece should be fabricated with a high-precision printing machine.
4. Non-linear modeling
4.1. Finite element modeling
The non-linearity of soft materials has been a challenging problem in deepening our understanding of the mechanical behaviors of a soft body. Accurate simulators based on Finite Element Method (FEM) are often utilized for this purpose. In our case, the physics simulation is required to describe the non-linearity of the elastomer which exhibits hyperelastic properties and large-deformation. Moreover, it should support self-contact among layers.
Here, we use ABAQUS—a commercialized physics engine that provides several constitute models for hyperelastic material and the self-contact module. Since the thickness t of ROSE is significantly smaller than its height then we modeled the body as a system of shell quadratic elements (size element is 2 mm) with plane stress assumption. This element system obeys the material constitution law defined by the Yeoh model thanks to its ability to accommodate large strain deformation precisely. Yeoh (1993) model for hyperelastic material can be written as

To represent the physical interaction between ROSE and the object, we applied the penalty friction formula with a friction coefficient of 0.7. This approach is also exploited for the self-contact condition between ROSE’s skin layers. In the simulation, we fix the bottom of the outer wall and rotate the bottom of the inner wall with a rotation angle θ (rad) and a rotation velocity ω (rad/s) (see Figure 2).
4.2. Mechanics of grasping function
Utilizing this simulation model is expected to clarify on the grasping functionality of ROSE. According to the working principle, the inner layer of ROSE is applied a torsional load (or twisting motion) by an external motor, which resembles a problem of torsional buckling of cylindrical shells. The inner layer is considered an active layer, whereas the outer layer is a passive one. This section aims to clarify the emergence and development of wrinkles (buckling deformation) which corresponds to the gripping functionality of ROSE.
First, we examine a small section of ROSE’s rim where the active layer (inner) and passive layer (outer) are split by the neutral axis as pictured in Figure 4(a). Thanks to the twisting motion of the active layer, the neutral zone undergoes a significant mismatching in shear strain between the active (δ
a
) and passive layers (δ
p
) as shown in Figure 4(a). This phenomenon leads to a non-uniform distribution of shear stress along the circumference of ROSE’s jaw, where several zones exhibit higher concentrations of shear stress than others. Once the stress in these areas surpasses the critical buckling limit, the inner layer starts folding inward (i.e., buckling deformation), manifesting in a series of wrinkles as shown in Figure 4(b). The wrinkle growth triggers the narrowing of the ROSE’s rim to form the grasping pattern. Note that this body transition is reversible, corresponding to the releasing pattern. ROSE’s wrinkles formation mechanism.
The wrinkle development progress can be characterized by critical buckling stress and time of stress traveling (Xu et al., 2010). The former attribute represents the threshold stress at which the structural integrity of the skin is compromised, initiating lateral deflection or buckling deformation. The latter refers to the duration for the stress to propagate and manifest in wrinkles. Depending on the grasping tasks and intrinsic properties of the target object, these two factors can be designed through the variation of morphological features (i.e., geometrical and material) and external stimuli (i.e., motor’s rotation angle θ and speed ω). To emphasize the contribution of the morphological factors to ROSE’s grasping performance, we set constant actuation parameters (i.e., θ and ω) for all numerical simulations and experimental trials. The grasping performance will be quantitatively assessed with two following measures: • Grasping force denotes the squeezing force generated on the surface of the object during the twisting motion. As the closing action is triggered by the formation of wrinkles on the ROSE’s skin, it is anticipated that controlling this metric involves conditioning the wrinkling process. Note that this metric only counts for the normal component, meanwhile, the effect of frictional stress due to the slippage state will be ignored. Moreover, this metric becomes null when the enveloping strategy is applied. • Contact area implies the area under the impact of the gripping force.
5. Effects of morphological features to grasping performance
The above simulation model is utilized to clarify the contribution of morphological features in the wrinkling transformation that facilitates the emergence of grasping action. On top of that, the ideal grasping form should deliver a significant total grasping force across a large contact area. These attributes are essential not only for delicately handling a diverse range of objects, including foods and fruits but also for supporting the stability of the grasped object.
The preliminary design featuring t = 2 mm, h = 100 mm, and r = 50 mm will serve as the initial candidate for comparative analysis. The twisting motion was set the same as [θ, ω] = [π, π/2] (rad, rad/s) for all trials. The impact of each factor will be observed in two scenes: free contact and with contact. The emergence and progression of wrinkles can be monitored by tracing the path of internal stress generated within the inner skin which is characterized by the cross-section area (thickness t and radius r), the height h, and material properties.
5.1. Thickness t
As numerically verified in Dung and Hoa (2013), the buckling deformation of a thin shell body is sensitive to the variation of thickness t. To evaluate how t contributes to grasping action, two scenarios were studied: 1) constant thickness (t = 2 mm) along the layer; 2) t is distributed w.r.t the height by a linear equation • ROSE, with a uniform thickness, exhibits large and evenly distributed wrinkles along the entire body length on both inner and outer layers. Such configuration arises from the homogeneous cross-section area of the soft body resulting in an identical critical buckling load. The closing form of ROSE’s skin manifests itself at the middle region (see Figure 5(a),) where most likely contacts the object. However, the entire structure experiences significant distortion, even at an early stage, which possibly creates an intricate contact interface. • In the other case, the wrinkle formation only appears at the head region, which is also the contact area (see Figure 5(b)). This is due to the rise of critical buckling values as the thickness increases (i.e., thicker cross-section area). The no-contact simulation illustrates that the grasping form of ROSE is developed more quickly and stably without collapsing the whole structure. The separation of the central space into wrinkled (in-contact) and non-wrinkled (free-contact) areas allows one to choose the desired contact location regardless of the object’s height (see Figure 5(b)). Additionally, the free space at the lower part enables various intriguing grasping strategies such as trapping material inside the non-contact space. Effect of thickness t on the closing form style and the grasping performance of ROSE. The unit of the Von Mises stress is N/mm2.
Examining cases involving contact and lift of a cylindrical object, Figure 6 illustrates the region where the ROSE skin applies clamping force at the end of the twisting motion. As observed in this figure, ROSE with constant thickness finds contact in a tight area at the top of the object which is less desirable for flat objects. Meanwhile, Figure 6(c) reveals that the 1-order-D30 yields an area approximately two times larger than that of the constant-thickness case. Simulation results show the effect of thickness t and material on the closing form style and the grasping performance.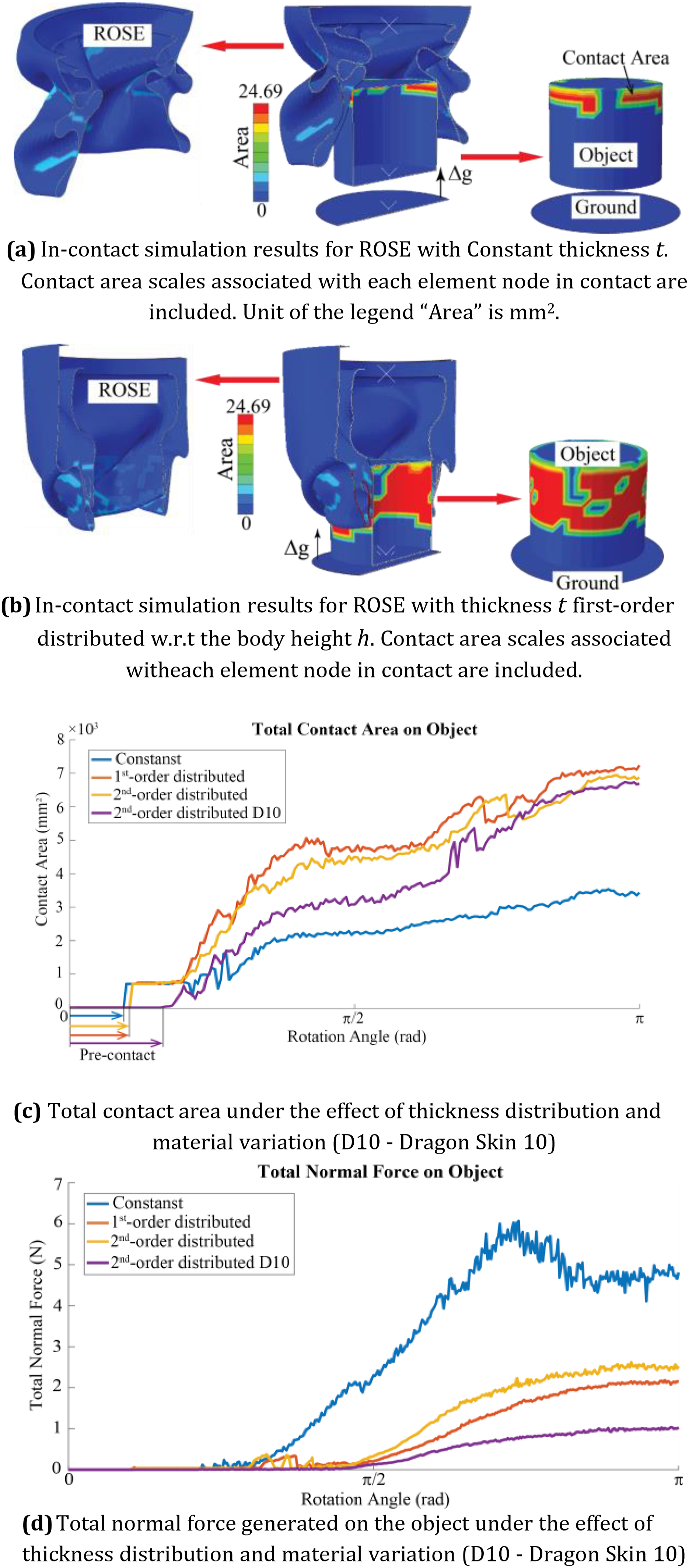
On the other hand, Figure 6(d) reports the total pressure generated on the object. The constant-D30 ROSE can exert extremely large gripping pressure on the object. However, there is a sudden drop at the end in response to the occurrence of the slippage (see Figure 6(d)). This result unveils the unsteady gripping condition of this configuration and the nontrivial risk of damaging the object owing to the limited impact area. To highlight the role of thickness distribution in the grasping capability, we vary t from t bottom = 2 mm to t top = 0.4 mm by a quadratic equation t = a × h2 + b, a and b are constants, that is, 2-order-D30 prototype. The simulation result displays no big difference in contact area compared to the 1- order-D30 case (see Figure 6(c)) but a noticeable improvement in grasping force (see Figure 6(d)). Another observation in terms of pre-contact periods as shown in Figure 6(c) shows that all ROSE prototypes require the same rotation angle θ to approach physical interaction with the object.
To sum up, upon the above simulation demonstration, we realize distributing the thickness t brings the most benefits to ROSE in various critical aspects.
5.2. Radius r and height h
One could choose the radius r based on the average dimensions of the target objects to achieve the proper grasping conditions (contact area and gripping force) with the smallest θ (i.e., minimum energy consumption). Also, the parameter h can be decided to ensure, at the end of the gripping motion, ROSE leaves enough free space for parts that are non-contact required.
More extensively, we here couple the effect of r and h by introducing their ratio, with the initial setting at r/h = 1/2. We conducted simulation runs for two prototypes with r/h ratios of 2/5 (h = 125 mm) and 2/3 (h = 75 mm), respectively, while 2-order varying the thickness t. Figure 7 presents the simulation results, highlighting differences in the number of buckled regions, or other words, wrinkles on the skin. This quantity increases with the increase of r/h ratio. In particular, r/h = 2/5 and r/h = 2/3 create 5 and 3 wrinkles, respectively. Since the grasping ability is tightly coupled to the growth of wrinkles qualitatively and quantitatively. This argument is reflected through the contact area and corresponding pressure in Figures 7(c) and 7(d). In terms of contact area, the result shows that forming fewer wrinkles most likely results in less contact area. This trend also holds for total gripping pressure generated on the object (see Figure 7(d)). On the other side, ROSE with ratio r/h = 2/3 introduces a larger gripping impact on the object within the same contact area as that of the initial specimen (r/h = 1/2). Nevertheless, increasing the number of wrinkles rather squeezes the soft body more extensively as well as lengthens the pre-contact period (see Figure 7(c)). This possibly lowers the mechanical robustness and hinders adaptive gripping strategies due to limited non-contact space. Simulation results showing the effect of the radius r and the height h on the closing form style and the grasping performance.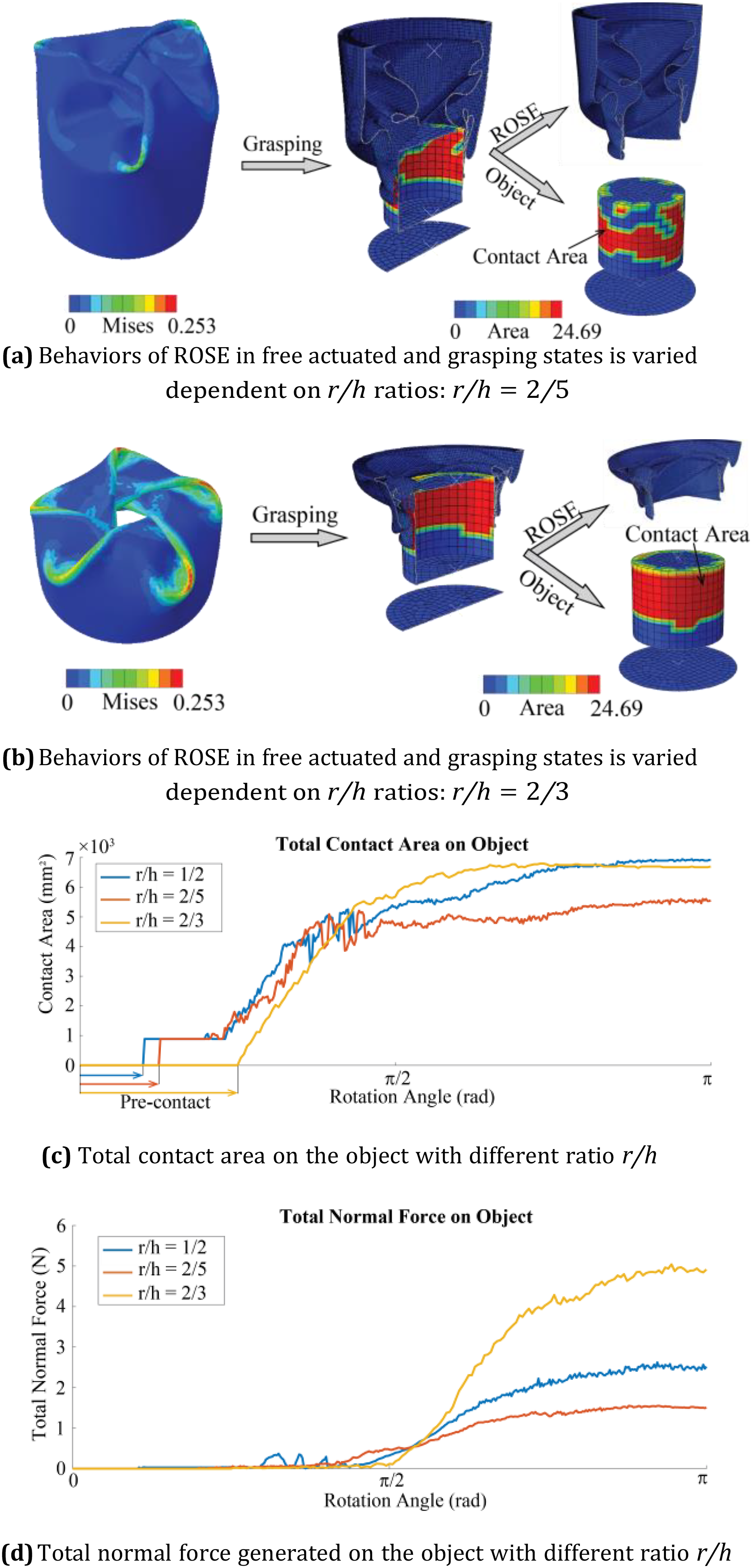
5.3. Material properties
A similar study was conducted with the variation of material properties. In more detail, we examined 2-order thickness-distributed ROSE with a new type of silicon rubber (Dragon Skin 10, Shore hardness 10A, Smooth-On, USA) by assigning hyperelastic coefficient C1 = 0.036 MPa and C2 = 0.0025 MPa (Xavier et al., 2021). Let us call this prototype 2-order-D10. Figures 6(c) and 6(d) reveal a slight decrease in contact area in comparison with the other two thickness-distributed cases. Whereas, the contact pressure on the object is significantly lower. It is reasonable considering the high softness level of Dragon Skin 10 and the necessary twisting angle θ to come into contact compared to other cases (see Figure 6(c)). Additionally, low-stiffness material could struggle ROSE in manipulating/carrying heavy objects in various orientations.
The above numerical investigation suggests that one could achieve the desired contact condition (contact area and force) by choosing the proper geometrical design and material. However, there exists a complex interconnection among these parameters which should be addressed comprehensively to be able to obtain optimal value for morphological variables.
6. Experimental Evaluation
6.1. Mechanical tests
6.1.1. Payload experiment
This experiment aims to define the maximum payload of the ROSE. The experiment setup is demonstrated in Figure 8. A spherical object was fixed on the top of a vertical ZTA-500N force gauge (IMADA Inc., Japan). The ROSE gripper is driven by a linear stage (Suruga Seiki Co., Ltd, Japan) to create a pulling force. We used a DC motor 17HS4401S (BIQU Inc., China) as an actuator for rotating the base. The linear stage and the motor were controlled by controller 1 and controller 2, respectively, by two Arduino Rev3 UNO boards (Arudino SRL Inc., USA). First, the linear stage moves down to the prescribed position and performs a specific gripping on the object (totally embracing the object). Next, the linear stage travels upward creating the pulling load reflected on the force gauge measurement. When the strain is beyond 100% of ROSE’s height, the linear stage continuously travels up without resting until the object is released from the gripper. Experiment to evaluate ROSE payload ability. The maximum observed payload was 328.7 N before the skin is detached from the base.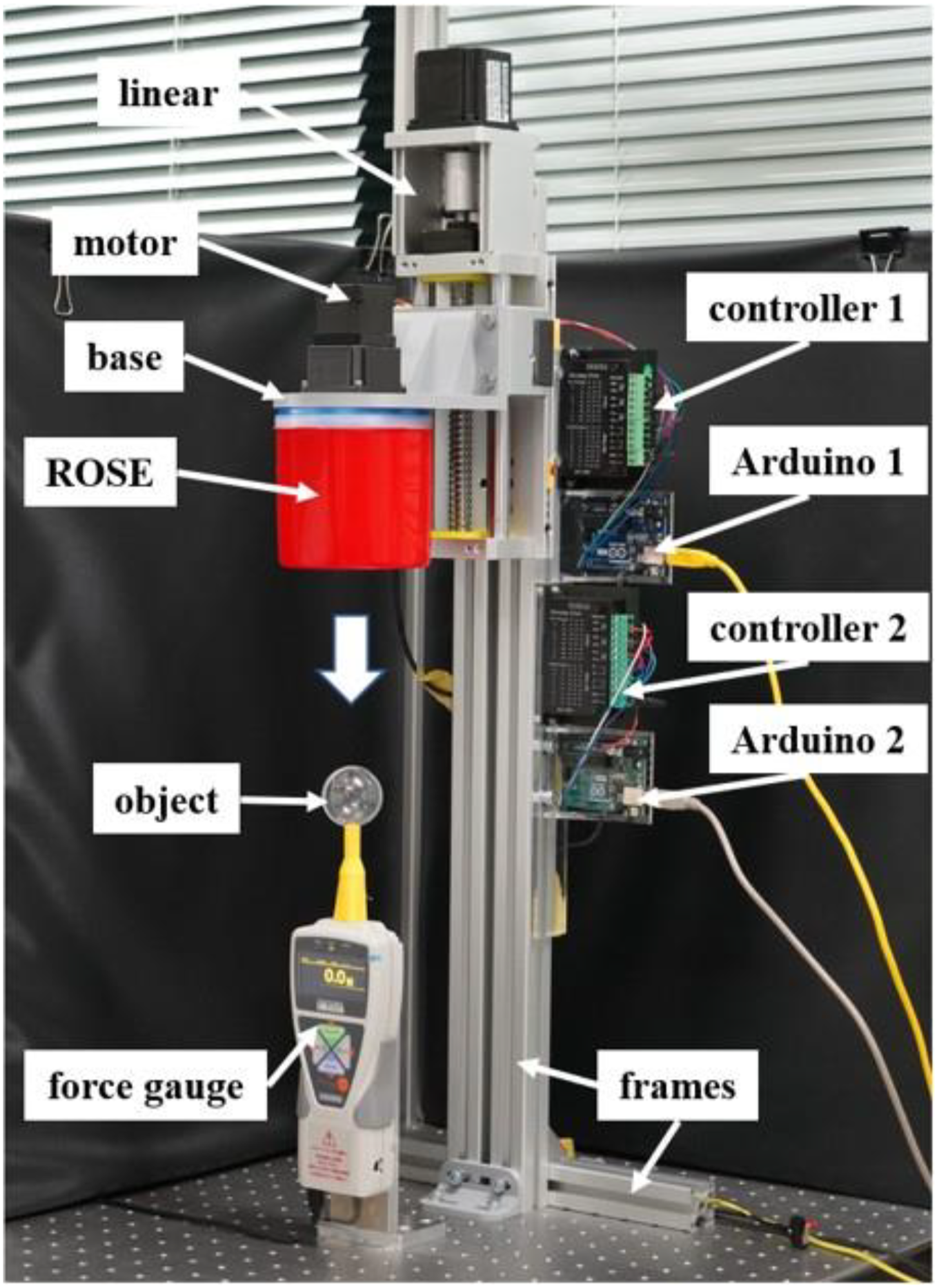
The load value and movement of the linear stage and the load are synchronously recorded. The experimental results indicate that ROSE could endure the maximum payload at 327.8 N (equivalent to 33.4 kgf) generated by about 50 g silicone skin. Note that, this result is derived from the Caging strategy, wherein the object is entirely contained within the free space, and the closing form functions as a barrier, preventing the object from being slipped out.
6.1.2. Durability experiment
Durability is considered crucial problem for soft robotic hands. Here, we attempt to demonstrate the ROSE’s durability through two cases: (1) repetitive grasping task, and (2) critical damage. In the first test, the robot arm UR5 was used to repeat the ROSE’s grasp, hold, and release the object (see Figure 9(b)). After nearly 400,000 times of grasping, visually, ROSE’s skin after this test has some small tears as observed in Figure 9(b). However, such small tears on the ROSE gripper’s skin do not affect the working ability of ROSE in our experiment. This result indicates that the ROSE gripper can work durably thanks to its simple but efficient structure. Durability test: setup and result.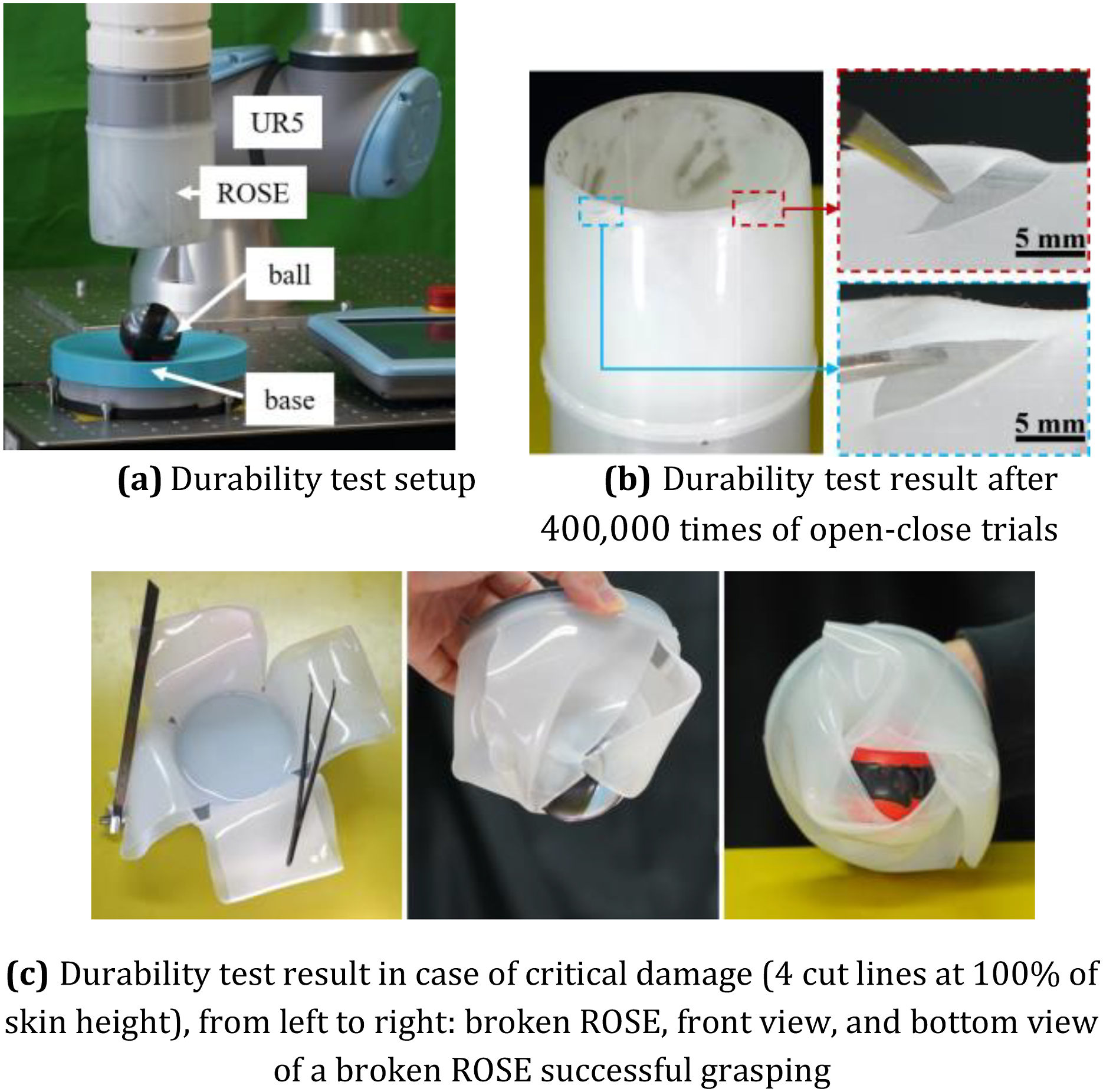
To demonstrate the critical case of damage, we cut the inner and the outer skins of the ROSE by 12.5, 25, 37.5, 50, 62.5, 75, 87.5, and 100% of their height and check whether it is still functional in grasping. Interestingly, regardless of the critical condition, ROSE is still able to buckle and firmly hold the object as seen in Figure 9(c). This ability highlights the versatility of the ROSE’s unique structure in adapting its grasping ability.
6.2. Gripping test
6.2.1. Adaptzability for geometry variation
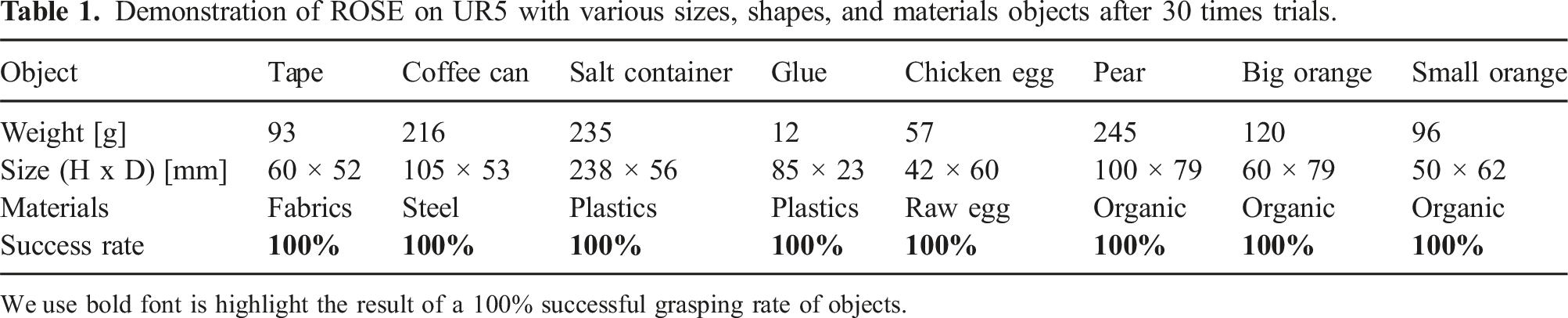
This session aims to demonstrate the adaptability of ROSE in gently manipulating objects without any damage or crash (see Figure 10). In each experiment trial, ROSE is required to execute a series of actions involving gripping, transporting, and placing items. For such cases, we applied Clamping strategy which indicates the rim of ROSE directly makes contact and continuously squeezes objects. Table 1 reported the success rate of ROSE for different objects that are varied by size, shape, and materials. As expected, ROSE shows conformity to tested objects regardless of their geometrical properties (e.g., edged, ring-shaped, or asymmetrical forms) and intrinsic stiffness, exemplified by its ability to handle both boiled eggs and beverage cans. Note that such adaptability is obtained without the involvement of any complicated control policies, implying the embodied intelligence of the device. Demonstration of ROSE on UR5 grasping objects with various sizes and shapes. Demonstration of ROSE on UR5 with various sizes, shapes, and materials objects after 30 times trials. We use bold font is highlight the result of a 100% successful grasping rate of objects.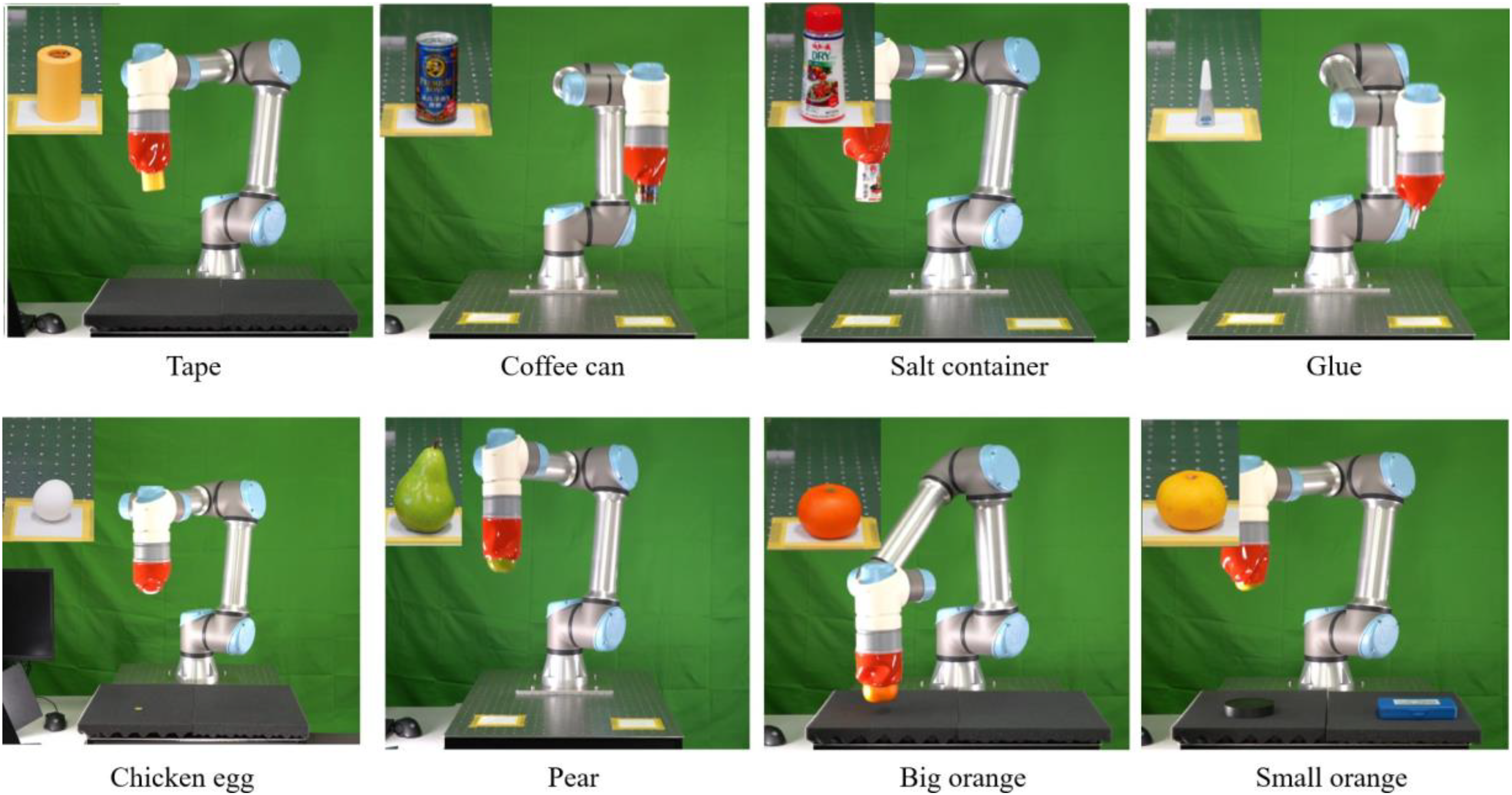
Result of grasping peeled boiled chicken egg submerged inside an olive oil container.
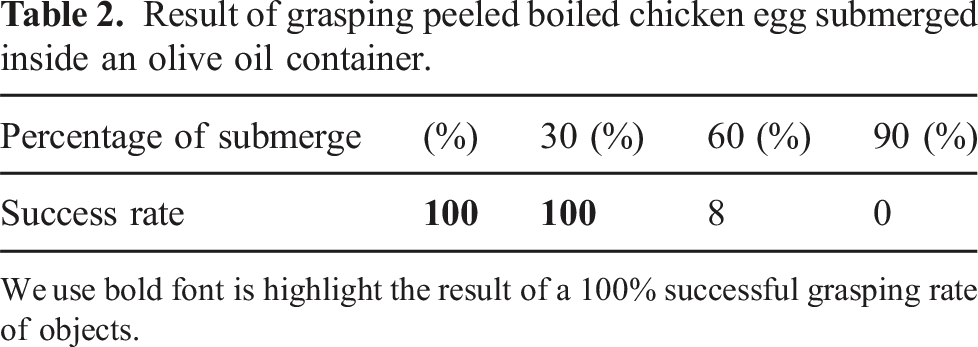
We use bold font is highlight the result of a 100% successful grasping rate of objects.
6.3. Practical showcases and evaluation
Soft grippers exploited in the agriculture industry have recently been recognized as a promising solution to enhance productivity and sustainability, especially in crop harvesting. We foresee ROSE could fit into this application thanks to its adaptability to various sizes and shapes as proved in Figure 10. Moreover, the unique gripping action offers two picking strategies that can be used depending on the crop.
The first strategy comes from the object’s motion resulting from the grasping action of ROSE’s skin. This implies that, when the ROSE embraces the object, then the rotation starts, and the object induces changes in both location (being lifted) and posture (being rotated). Such motion can be decoupled into rotation motion around the object’s neutral axis (twisting) and vertical translation (pulling). These are two important techniques, particularly for crop detachment tasks (Elfferich et al., 2022). We’ve noticed that to incorporate multiple detachment techniques (such as pulling, twisting, or bending), existing harvesting-robotic grippers are typically required to provide an equal number of actuations. In contrast, ROSE is expected to detach the crops from its branches by simultaneously twisting and pulling them with a single actuation. Crops with a soft body and a weak linkage to their branches are potential applicants for this strategy. To find proper ROSE morphology for this strategy, we plot rotation angles and translation distances of the object for different ROSE candidates in Figure 11. Clearly, 2-order-D10 ROSE is the most suitable option, as it provides the greatest magnitude of twisting and translation. This configuration also offers a gentle gripping force on the crop within a large contact area as previously reported in Figures 14(c) and 14(d). Simulation results showing motion of the object, including rotation and translation displacement, under the effect of the closing motion of ROSE’s skin.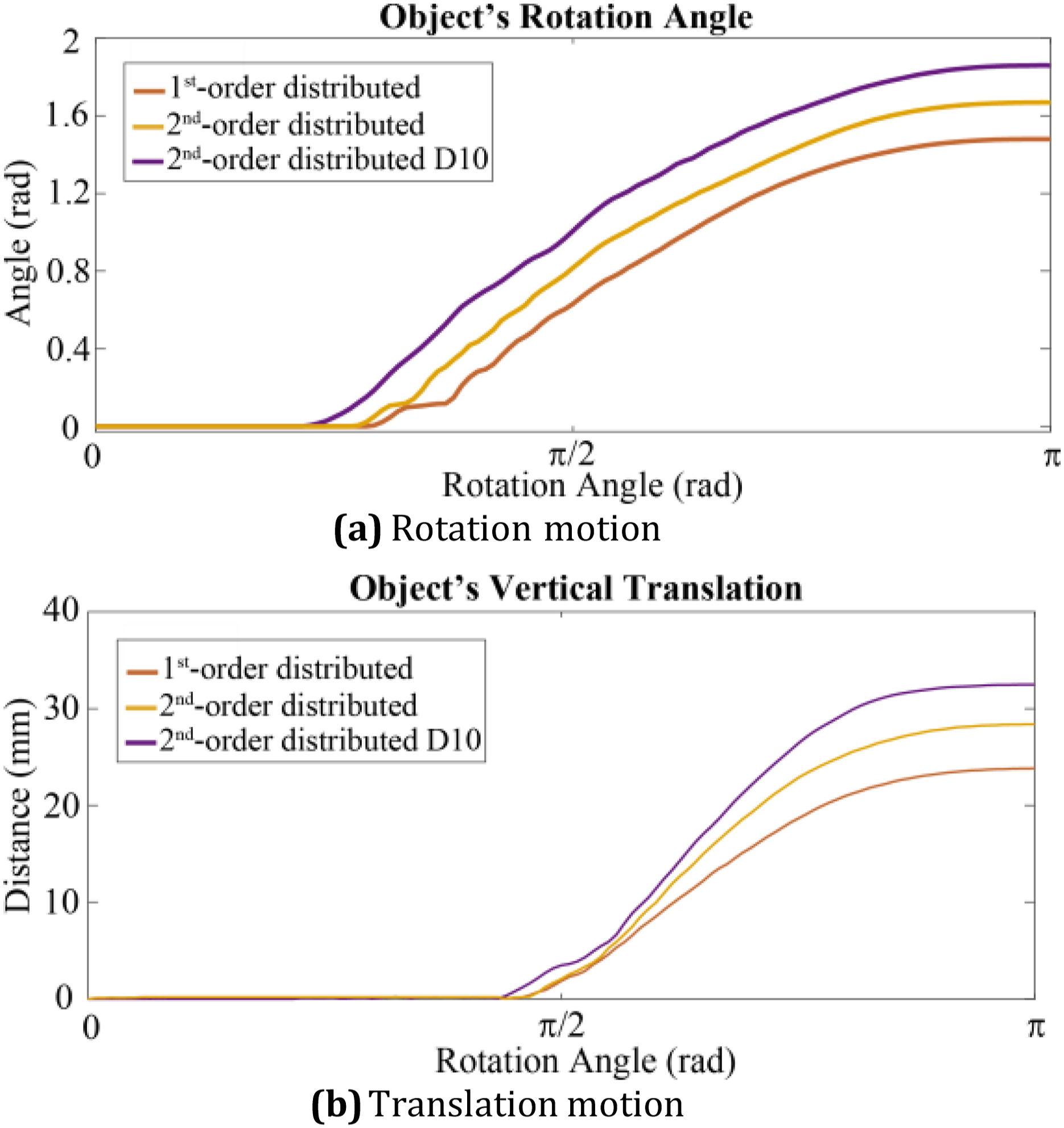
The second strategy is actually Caging gripping method where the free-contact space (see Figure 5(b)) will be taken place by the crop body to maintain the crop quality after harvesting. In this scenario, supplementary motion is needed to assist ROSE in completing the detachment process. In this section, we showcase each strategy for ROSE to harvest two types of crops: 1) Mushrooms; and 2) Strawberry. ROSE is attached and actuated by the end-effector of a DENSO robot arm.
6.3.1. Strawberry
Strawberry farming is a high labor demands industry, especially during the harvest season. Pickers are trained on how to apply a proper picking technique to detach the strawberry while firmly grasping the body without damaging the plant. Although, the strawberry itself is much stiffer than the mushroom, applying excessive pressure on the fruit could eventually influence the overall freshness and appeal of the harvest. To tackle this challenge, we applied Caging strategy for this type of fruit. More specifically, a large portion of the strawberry will penetrate within the free-contact space while the closing form of ROSE will act as an anchor nailing the head. Then, a slight bending motion is applied to the whole structure conducting the detachment task. The whole process is pictured in Figure 12. The integrity of the fruit remains the main factor for its success. Five attempts using this procedure were conducted and 100% of success rate was recorded without any damage to the strawberry. Note that, the tested fruit was freshly picked up at the natural orchard with permission, and used for experiments on the same day to maintain the quality. Experiment to evaluate ROSE harvesting capability via mimicking natural farmland environments.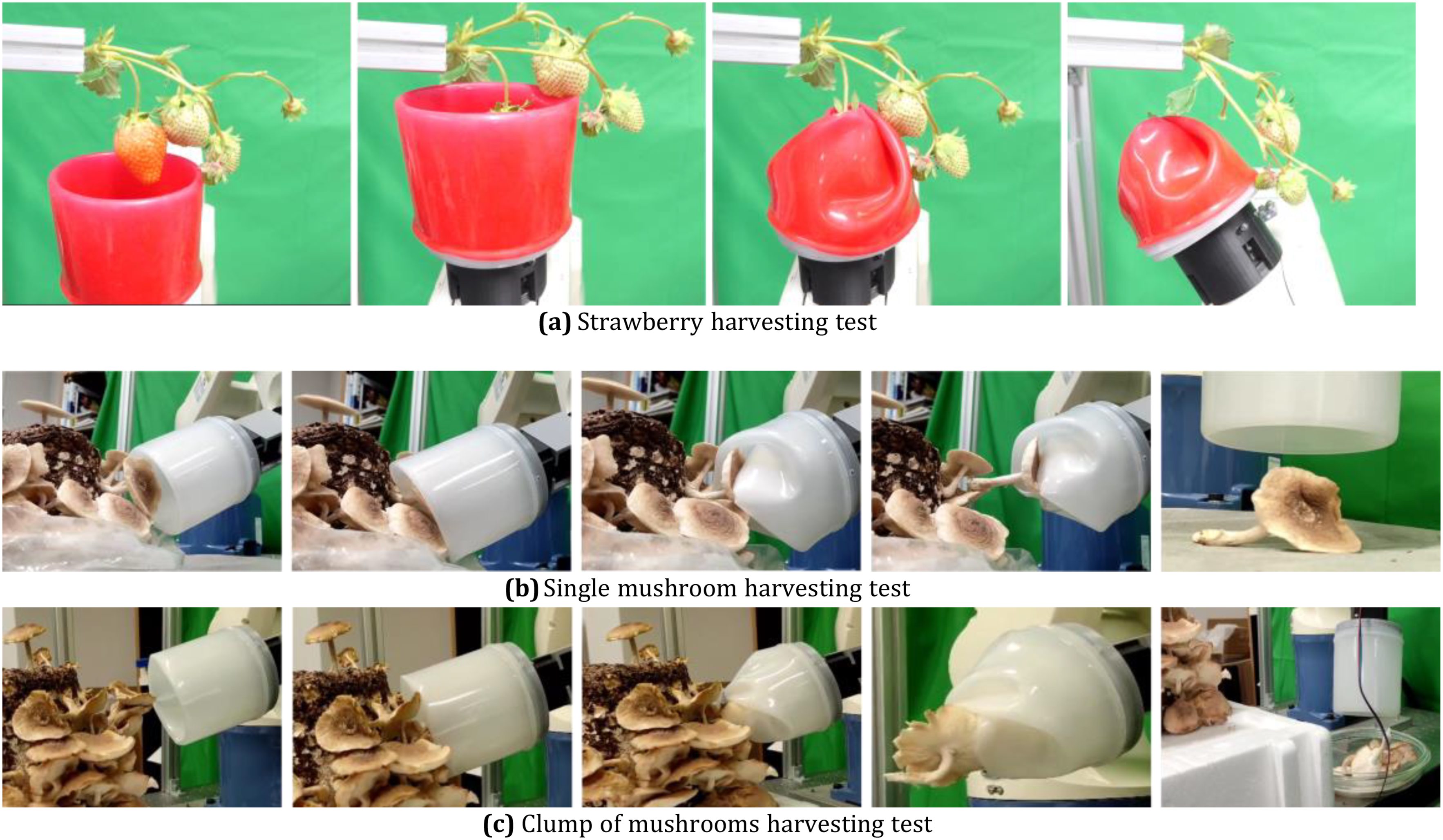
6.3.2. Mushroom
We grew mushrooms called Shiitake used for experiments in a cultivation kit. Unlike a strawberry, Shiitake has a delicate body. Therefore, ROSE is required to gently and precisely hold them at the right spot. The picking technique for mushrooms on the farm is usually supported by a detachment motion such as twisting or pulling. However, thanks to the twisting motion of the object under the effect of ROSE’s grasping motion, the target can be removed from its root by a single actuation. Figure 12(b) displays the entire process, in which, ROSE slightly squeezes the cap and detaches the whole body at the end. The right-end picture clearly shows that the mushroom is still undamaged which implies a successful picking. We attempted 5 times and the success rate recorded for this case is 100%.
On the other hand, we would like to see if ROSE could successfully gather a clump of mushrooms at once as illustrated in Figure 12(c). The experimental tests proved that ROSE can successfully execute this task without breaking any piece of mushroom if the size of the clumps allows them to comfortably accommodate within the grasping space. Otherwise, the failure occurred. Hence, it is expected to achieve a higher success rate for this case by properly adjusting the radius r. In summary, ROSE demonstrated itself capable of picking elegant objects like mushrooms, whether in singular or clustered forms.
7. Discussions
7.1. Morphological analysis
In this paper, we extend the understanding of the mechanics of ROSE by looking over the contribution of morphological factors including thickness t, radius r, body height h, and material characteristics. For instance, the thickness t should not be a constant value but rather be varied along the body height h. Constant thickness results in uniform critical buckling stress across the body, leading to the formation of wrinkles throughout the body length (refer to Figure 5(a)). This configuration has proven to be unfavorable for object squeezing (see Figure 6) due to high grasping forces applied on a limited area. This observation suggests that distributing skin thickness is a potential solution to meet the required performance. Thus, we employ two thickness distribution strategies: linearly (1-order) and non-linearly (2-order). As a result, the grasping characteristic is improved significantly. On the other hand, the effect of r and h are coupled together via their ratio r/h. This metric has been proven to quantitatively and qualitatively affect the grasping action.
7.2. Simulation validation
Here, ROSE was evaluated by the total contact area and pressure resulting at the end of the twisting action. We relied on a simulation model built out of ABAQUS and the results reveal several important remarks since it is challenging to investigate such contact information in situ, during the grasping action of ROSE. To validate the reliability of the simulation result, we conducted an actual measurement for the contact area as a comparative metric. Specifically, we wrapped a paper sheet around the object’s surface to capture the actual contact footprint of ROSE during the grasping action. Here, the inner surface of the ROSE device is coated with colored ink to facilitate clear imprinting on the wrapped paper during squeezing operations. Following the gripping process, the paper is separated from the object and stretched onto a flat surface, and the imprints from each gripping action are captured by a camera. The resulting contact area is then determined through careful analysis using image-processing methods. We employed slow-speed twisting motion for all experiment trials (five times) to ensure that the stick contact dominates the slip counterparts in the resulting footprint. The average measured contact area, along with their standard deviation, in response to different rotation angles θ (only those in contact phase) for the case 2-order-D30 are reported in Figure 13. In general, the experimental results (red diamonds) impose a relatively smaller contact area compared to those from the FEM model, despite aligning closely with the expected inclination. Various factors could contribute to this mismatch such as differences in friction coefficient or inaccurate measurement procedure. Regardless of that, the validation shows the feasibility of the model in predicting contact states of ROSE w.r.t the grasped object. A greater effort is needed to provide a systematic measurement method for not only quantitatively assessing contact area but also grasping force. Actual contact area measured on the object for 2-order-D30 in comparison with the simulation result.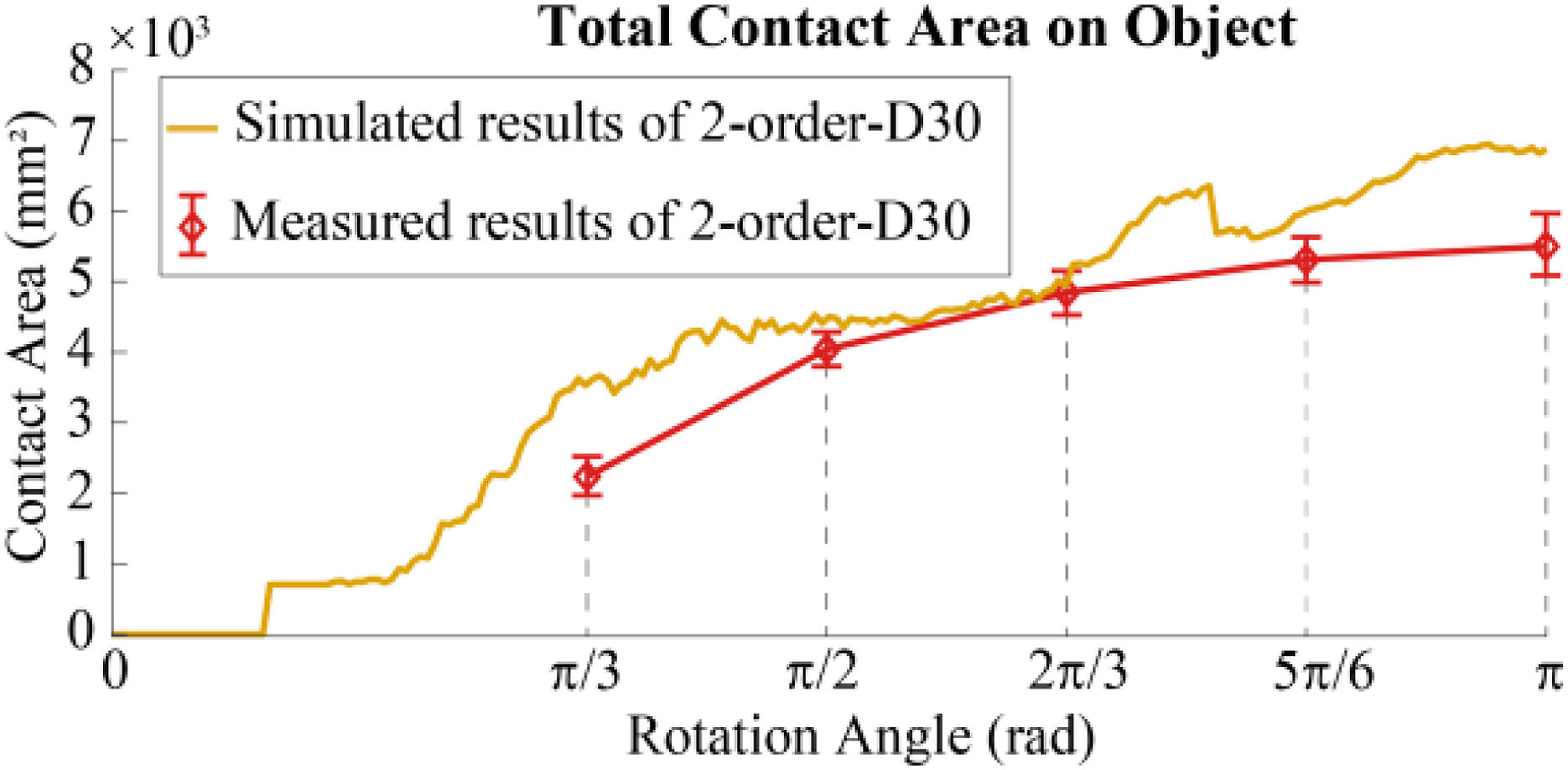
Consequently, despite the complexities associated with modeling highly non-linear buckling and multiple contact conditions, the proposed method is promising for optimizing efficiently ROSE design tailored to specific tasks.
7.3. Coupling motion of the grasped object
When an object is embraced by ROSE, the object is moved by the rotational actuation, thus its posture also changes. The rotation motion of the inner layer is responsible for the twisting motion of the object (i.e., rotating and lifting as observed in Figure 6(c)) and numerically presented in Figures 11(a) and (b). This motion might be advantageous in the agriculture industry where ROSE is utilized to separate crops from the branches by a single actuation. Ideally, the object would rotate back to the original posture after release from ROSE. However, it is not always successful due to slips during grasping. This motion of the object is not desirable in some actual applications, especially for picking-and-placing tasks that strictly require precise orientation/position of the items. Another important remark is related to the workable size of objects. Given its operating principle of gradually tightening the open space to facilitate grasping, ROSE is limited to objects that fit within this working space. Additionally, as visualized in the simulations, the ROSE body tends to contract itself under the effect of twisting motion, leading to loss of contact with oversized and flat objects. To cope with this matter, the initial morphology and actuation system of ROSE should be redesigned to allow for active adjustment of the working space. Therefore, such issue deserves further approach with a thorough evaluation, which is out of the main scope of this paper.
7.4. Contact status and impact of rotation speed
A noted aspect is the contact status (stick/slip) between the object and the ROSE skin throughout the gripping process. As the twisting angle θ increases, the normal pressure gradually rises, leading to a corresponding increase in shear frictional force. Consequently, we anticipate that the slipping state will begin to dominate over the sticking state within the contact surface at the early stage (after the pre-contact period). Then, there will be a transitional moment where the sticking state will dominate the contact surface. As a result, the sooner the transition phase appears, the more stable the object-grasping becomes. It should be noted that these attributes vary with the friction condition between the object and ROSE skin. To inspect this feature, we recorded and plotted the number of element nodes exhibiting Sticking (orange lines) and Slipping (blue lines) statuses for all thickness-distributed cases in Figure 14. This simulated result reveals the following noticeable remarks: • First, one can observe that the morphological specs have a nontrivial impact on the transition phase. Specifically, 2-order cases (D30 and D10) have an earlier transition phase than the 1-order case. • Second, even though the contact area of these three cases shows no significant difference, especially at the end of the gripping process, however, this claim does not hold when looking at the sticking/slipping ratio. For example, the 2-order-D30 possesses over 80 sticking nodes while the slipping ones come down to none. Whereas other cases have fewer sticking nodes and more slipping nodes. Simulation results showing contact condition on the object is statically recorded as the number of element nodes exhibiting Sticking (red lines) and Slipping (blue lines) status.
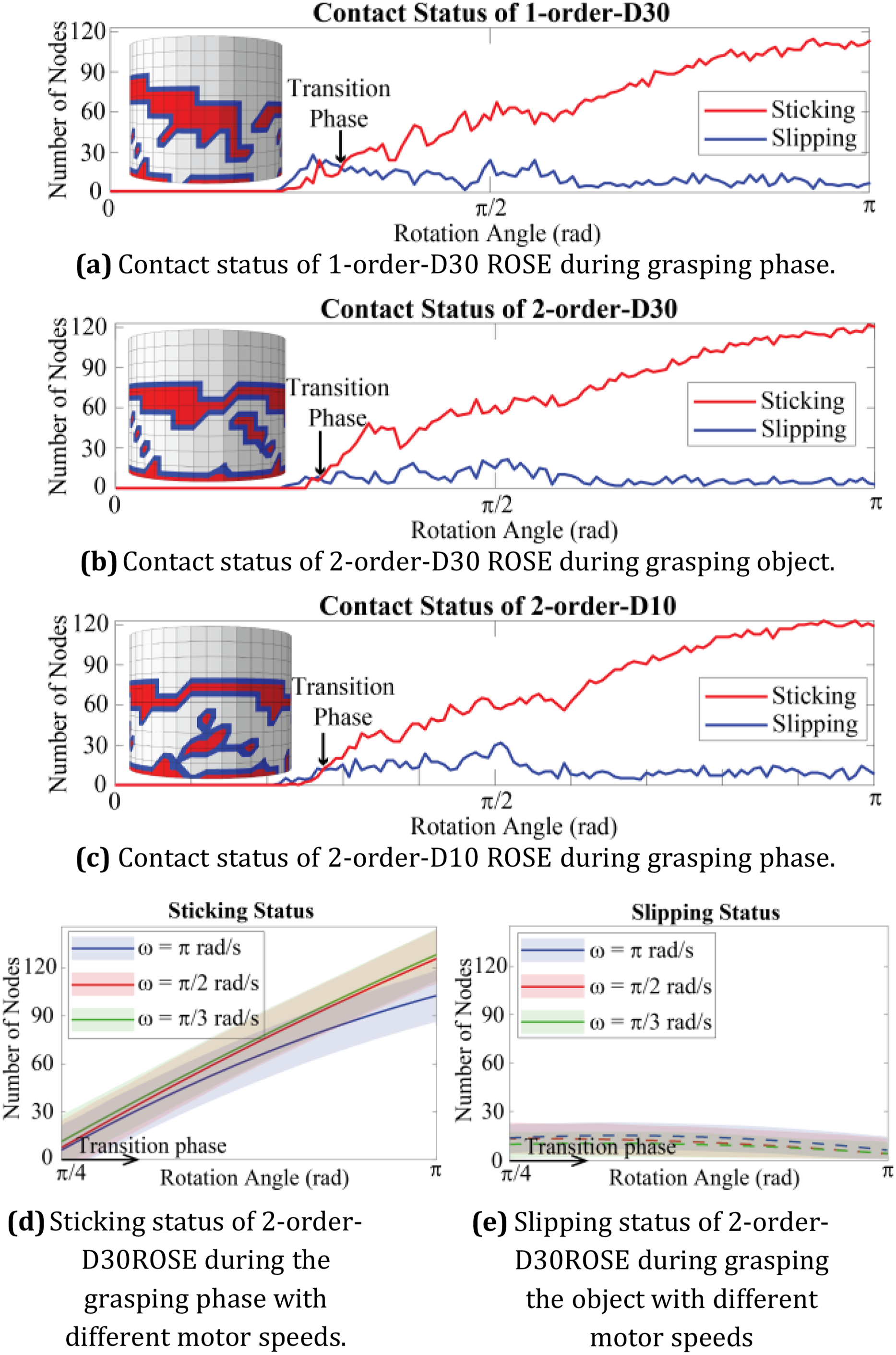
Consequently, physical specs at the contact interfaces may vary significantly among types of objects, morphology of ROSE, and dynamics of stick/slip phenomenon, which require further study toward universal grasping of ROSE.
While our primary focus was on investigating the impact of morphological features on ROSE’s functionality, it is worth considering whether rotation speed (ω) could also have its influence, as expected. Here, we conduct a comparative study of this parameter by monitoring contact statuses (due to their dynamic nature) of the 2-order-D30 ROSE at different rotation speeds. Specifically, we performed two simulations with the same simulation setting except for rotation speed: ω = π rad/s and ω = π/2 rad/s, while the same rotation angle θ = π (rad) was applied. The variation in contact statuses for these cases, compared to those of the initial case (i.e., ω = π rad/s), are presented as medium lines along with the data interval in Figure 14(d) (Sticking) and Figure 14(e) (Slipping). Note that the data presented in these figures only account for the period after the transition phase.
At first glance, one can observe that faster twisting motion has a trend to decrease the sticking contact area (Figure 14(d)) then resulting in a lower normal grasping force. Meanwhile, there is an observed increase in the area influenced by slipping conditions (Figure 8(e)). Furthermore, as seen in Figure 14(d), a slight change in rotation speed (e.g., from π/2 to π/3 rad/s) appears to have minimal impact on the contact interface. Whereas a more considerable variation in the number of sticking nodes is observed for the larger adjustment (e.g., from π/2 to π rad/s).
8. Conclusion
This article presents a parameterized design and an effective fabrication method for a newly developed bio-inspired gripper named ROSE. A comprehensive examination was conducted to evaluate the mechanical integrity and grasping capabilities of ROSE in diverse practical scenarios. Additionally, a detailed investigation devoted to the individual relationships between each morphological attribute and grasping performance, as evidenced by the progression of wrinkling deformation. The consistent success of ROSE in grasping trials underscores its universal grasping capability. Lastly, ROSE was tasked with harvesting mushrooms and strawberries, achieving high success rates in picking tasks for both individual and clustered crops, regardless of their soft or stiff characteristics.
Considering the unresolved issues, our future efforts will address the following tasks: 1) Formulating an automated design pipeline that concurrently considers all elements, facilitating the provision of optimal body morphology and control parameters based on input requirements; 2) Introducing and integrating supportive motions from the robot arm to offset any unintended consequences arising from the grasping action.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the JSPS Grant-in-Aid for Scientific Research (KAKENHI) Project 24K00847.