
Abstract
This article presents a tracking control approach with obstacle avoidance for a mobile robot. The control law is composed of two parts. The first is a discrete-time model predictive method-based trajectory tracking control law that is derived using an optimal quadratic algorithm. The second part is the obstacle avoidance strategies that switch according to two different designed obstacle avoidance regions. The controllability of the avoidance control law is analyzed. The simulation results validate the effectiveness of the proposed control law considering both trajectory tracking and obstacle avoidance.
Keywords
Introduction
The motion control of robots has been an important research topic that has many practical applications in various industries. A kinematic control system with control laws for nonholonomic constraints of robots is considered under the assumptions in the Brockett’s theorem, 1 with the nonholonomic mobile robot being controlled with fewer number of control inputs than the multiple state variables. The motion problem of the nonholonomic mobile robots can be analyzed with respect to in aspects as point stabilization, 2 trajectory tracking, 3,4 and path following. 5,6
During the past several decades, many methods of motion tracking control of nonholonomic mobile robots have been proposed. Some motion tracking control schemes can be found in the literature, 7 –9 where the complex dynamics of the entire mechanical system are assumed to be exactly known. Moreover, various robust and adaptive control schemes have been implemented to address the control design for perturbative nonholonomic mechanical systems. 4,10 Many methods, including linear differential equation methods, 11 sliding mode control methods, 12,13 backstepping methods, 14,15 saturation feedback control methods, 16 and feedback linearization methods, 17 among others, have been proposed to address the problem of tracking control for nonholonomic mobile robots.
As an advanced process control method, the model predictive control (MPC)
18,19
shows its wide application in the field of survey. The essential problem of MPC is to find optimal inputs to minimize a specific cost function with or without state and input constraints. The cost function is composed of the errors between the reference output and the predicted practical output. MPC, also known as receding horizon control, has also attracted many research interests in the study of nonholonomic mobile robot. Of particular interest here is on the application of MPC to address the trajectory tracking problem for mobile robots.
20
–23
The Lyapunov-based MPC was studied by Liu et al.
20
for tracking control of nonholonomic mobile robots. An MPC scheme without stabilizing constraints and costs was studied by Worthmann et al.
21
for tracking problems. Asymptotic stability of controllers is only addressed for the set-point stabilization problem,
20,21
and these controllers are not applied to trajectory tracking problems. Gu and Hu
22
proposed a classic MPC controller, which can guarantee the stability of control systems in the terminal state region. Škrjanc and Klan
Obstacle avoidance is a key research problem for the navigation of moving objects in a dynamic environment. The obstacle avoidance algorithms can be generally classified into global and local path planners.
24
Kanjanawanishkul et al.
25
proposed an obstacle avoidance approach, which is designed in path following control framework by using sensor information to generate new waypoints. However, the path planning problems are only considered in most obstacle avoidance approaches proposed in the literature by leaving out the control phase.
24,26
The tracking control problem becomes complex when the obstacle environment is taken into account. The solution can be considered designing the controller with handling tracking and obstacle avoidance simultaneously, which means that the tracking of nonholonomic mobile robots is feedback controlled with designing the motion control of obstacle avoidance. The recent literature have contributed problems along these lines. An adaptive control system was proposed for tracking and obstacle avoidance of a class of mobile robots with limited detection ranges in the presence of unknown skidding and slipping.
27
The adaptive control method was used with the potential function to propose a scheme to achieve the trajectory tracking control with collision avoiding for mobile robots.
28
Different from setting potential functions,
27,28
Rodrguez-Seda et al.
29
represented the interaction of the vehicle and the obstacle as primary elements for avoiding collisions, and the safe distance was set to guarantee avoidance control performance without interfering with the trajectory tracking control. Akka and Khaber
30
proposed a fuzzy controller to achieve trajectory tracking control and avoid collisions. The weighting matrices of linear quadratic regulator are adjusted dynamically to achieving the obstacle avoidance. However, the environment information is not considered in the article. A car-like mobile robot within an intelligent space with the mixed
The main contributions of this work are to use the discrete-time system model based on MPC to achieve the trajectory tracking control and to avoid obstacle collisions. Firstly, an MPC law is derived by minimizing the cost function composed of predictive discrete-time state and control variables. Secondly, we consider static obstacle ranges as the control excitation condition that divides avoidance region into two parts, named as conservative and regulated region, respectively. The former is the essential setup for avoiding obstacles control and the latter can ensure obstacle avoidance and tracking performance of mobile robots simultaneously. The constraints of feasible avoidance conditions are analyzed and then added into the MPC law for the purpose of achieving trajectory tracking control. Finally, the simulation is implemented and the result validates the effectiveness of the proposed control approach.
The rest of the article is organized in the following manner. The deduction of control law based on MPC in discrete-time system is given in the second section. The obstacle avoidance control strategy is described and analyzed in the third section. The performance of simulation experiment is presented in the fourth section, and conclusions are given at the end.
Problem formulations
Kinematic system for nonholonomic mobile robots
As shown in Figure 1, consider a differential drive robot on the ground for no sliding motion, the nonholonomic constraint for position coordinates x, y and the angle θ is as follows:


The nonholonomic mobile robot.
The kinematic equations of robot are given as follows:
where
The orientation angle of the robot is a variable for three-dimensional space. However, the attitude angle of robotic posture cannot be obtained from Figure 1. The robot motion is only constrained on the plane while the limitation for speed of the wheel movement is not available, the motion constraint equations cannot be integrated, 32 such that the system is a nonholonomic constraint system. Furthermore, it holds the condition that there is no continuous or time-invariant feedback to drive the nonholonomic system to the stabilization point. 1
Trajectory tracking
It is necessary to obtain a linear time-varying system for trajectory tracking. Since nonholonomic robot control systems are usually nonlinear, to simplify calculation, we linearize the system. The linearized feedback 11 is proved to be asymptotically stable in the control process of the system.
To illustrate the control problem of tracking, the reference robot is defined with a reference state vector
For the point stabilization problem of tracking problem, it is assumed that

It can be obtained the error dynamic model by differentiating the error state vector in equation (4):

For the convenience of linear problems, we linearize the right-hand side of equations in equation (5). It yields

where

For the condition
Predictive tracking control strategy
Now, we consider the characteristic of time-variant of reference state in the tracking control system. Assuming that the form of continuous-time system can be reformulated into discrete-time form from equation (6) as follows:

The discrete-time system (equation (8)) can be transformed into a discrete state-space system as follows:

The reference linear velocity
Assuming the state and control variables of the system (equation (8)) are measurable and controllable at the sampling time

where

where
Here is the transformed result of the cost function in quadratic form as follows:

where


where

Collating equation (13), it yields

where

where
It can be acknowledged that equation (16) derived from cost function (equation (12)) is considered as a quadratic system, which is composed of an input vector

The control vector is developed into the form as follows:

where

Obstacle avoidance control strategy
Obstacle avoidance zone
As shown in Figure 2, the dark region represents the obstacle area. In this article, all obstacle regions are modeled as circle-shaped objects. The collision area of the ith obstacle can be defined as follows:

where

The illustration of trajectory tracking and obstacle avoidance.
We proposed a new collision avoidance strategy for predictive trajectory tracking control. The strategy consists of two parts, namely conservative and regulated obstacle avoidance control strategies. The conservative region

and
Conservative control strategy
When the mobile robot moves to the region
The obstacle avoidance condition essentially constrains the input variables in discrete control systems. Based on the required orientation of the robot under obstacle avoidance conditions, the control variables presented in formula (equation (7)) are readjusted. Based on the consideration of obstacle avoidance control conditions, 28 we make the following assumptions for obstacle avoidance of robots in discrete control systems.
Assumption 1
The reference robot is not in contact with obstacle regions (excluding obstacle avoidance area) during the whole motion process. When it moves close to obstacle regions, the reference robot can move away from obstacle regions for a period of time. The reference trajectory forms a smooth, continuous, and derivable curve during the control time.
In the course of trajectory tracking, the robot may have a special linear velocity and an angular velocity before it enters the conservative region at time
As shown in Figure 2, in the geometric relationship, straight lines
Assumption 2
When the orientation of robot is not in the angle between the directions of
According to geometric principle from Figure 2, the robot will not contact the obstacle region when it enters the region
Assumption 3
When the orientation of robot is in the angle between the directions of
To study the orientation of the robot toward the point
The value of
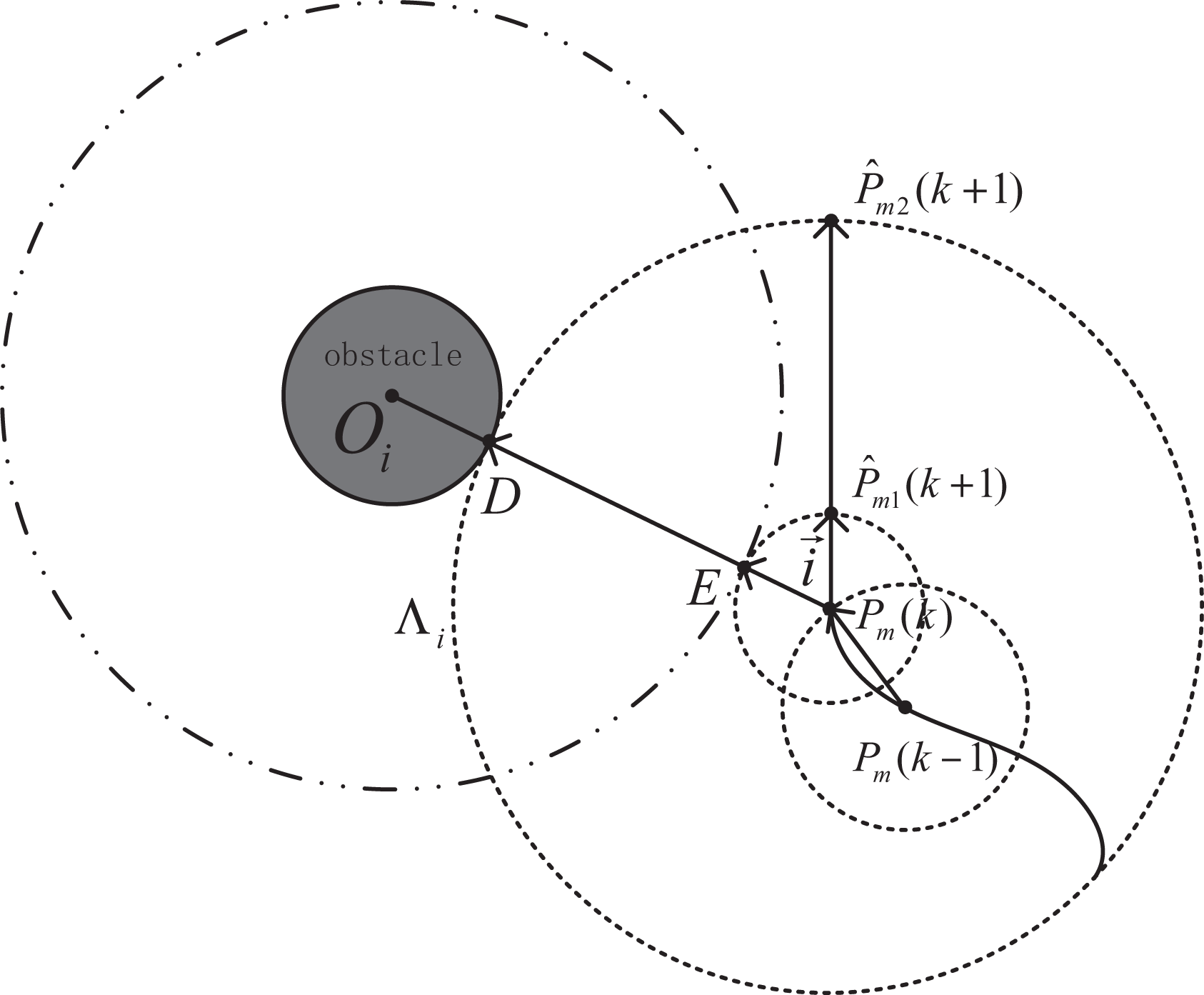
Illustration of obstacle avoidance movement before entering the region
Assume that the robot is subject to obstacle avoidance control at the time constant k, then the conservative control strategy is defined as follows: Step 1: Let the linear velocity satisfy Step 2: Let the angular velocity satisfy
Steps 1 and 2 are applied alternately and the robot can be controlled as follows:

where
Theorem 1
When the Assumptions 1, 2, and 3 are held in the motion control system, assuming that the mobile robot enters to region
Proof
Since avoidance control time is discrete, the conservative control stability of the mobile robot is demonstrated by mathematical geometry. As shown in Figure 4, since the robot is controlled by steps 1 and 2 in region


Illustration of moving away from the region
Apparently, it will deduce

It will be obtained the inequality relation as

The relationship
Regulated control strategy
In view of the simplicity of the obstacle avoidance strategy of conservative control, we consider the trajectory tracking performance and propose a method that takes both the tracking performance and the obstacle avoidance control performance into account. The advantage of this strategy is that in the process of trajectory tracking, the robot can move away from the obstacle avoidance area directly under regulated control strategy without adopting conservative control strategy, so that the trajectory of the robot retains the tracking characteristics and the whole tracking trajectory is optimized.
Assume that the robot moves to the conservative region

The direction of robot orientation is

where
Figure 5 shows the block diagram of the control algorithm of the conservative obstacle avoidance control and the regulated obstacle avoidance control. The linear velocity selection in the process of obstacle avoidance is obtained by the algorithm of MPC trajectory tracking and calculated in real time according to the location information in the whole motion control process. In general, obstacle avoidance control is based on trajectory tracking control for the steering control of mobile robots in the article.

Both conservative and regulated obstacle avoidance control strategies.
Simulation results
To verify the proposed control strategies for trajectory tracking, the experiments are performed by using differential drive robot kinematic model. The one is to show the performance of the conservative obstacle avoidance control strategy, and the other is to show the performance of the conservative and regulated obstacle avoidance control strategy. To better show the control performance, we add other tracking and obstacle avoidance control strategies for comparisons.
Conservative strategy for tracking control
Assuming that sizes of all obstacles are same and randomly distributed around the reference trajectory, the number of obstacles is M = 3, the radius


Circle-shape trajectory tracking with avoiding obstacles.
The time shift is set as
A simple normal algorithm is considered for comparing the performance of conservative obstacle avoidance control. Assume that the trajectory tracking controller of simple algorithm is the same as the one in this article. When the distance from the obstacle is the same as r = 0.2 m, the controller makes the mobile robot turn to the
Figure 6 shows the motion effect of mobile robots for the model predictive tracking control with conservative and normal control strategies. Figures 7 to 11 show the results, which are expressed, respectively, for the tracking trajectory, three error states, linear velocities, and angular velocities for using both obstacle avoidance methods. Figure 6 shows that controlled robots can effectively avoid obstacles while tracking the reference trajectory. Figures 7 to 9 show the variation of error state components. Figures 10 and 11 show the variation of the linear speed and angular velocity control of both methods. Figure 10 shows the change time of the normal and conservative obstacle avoidance control. It can be derived that control time of the normal method is larger than the proposed method for obstacle avoidance. In addition, the control time of avoiding collisions should be given priority to the normal control strategy, which is not considered in the proposed method.

The error state for x position.

The error state for y position.

The error state for orientation.

The comparison of linear velocity and reference.
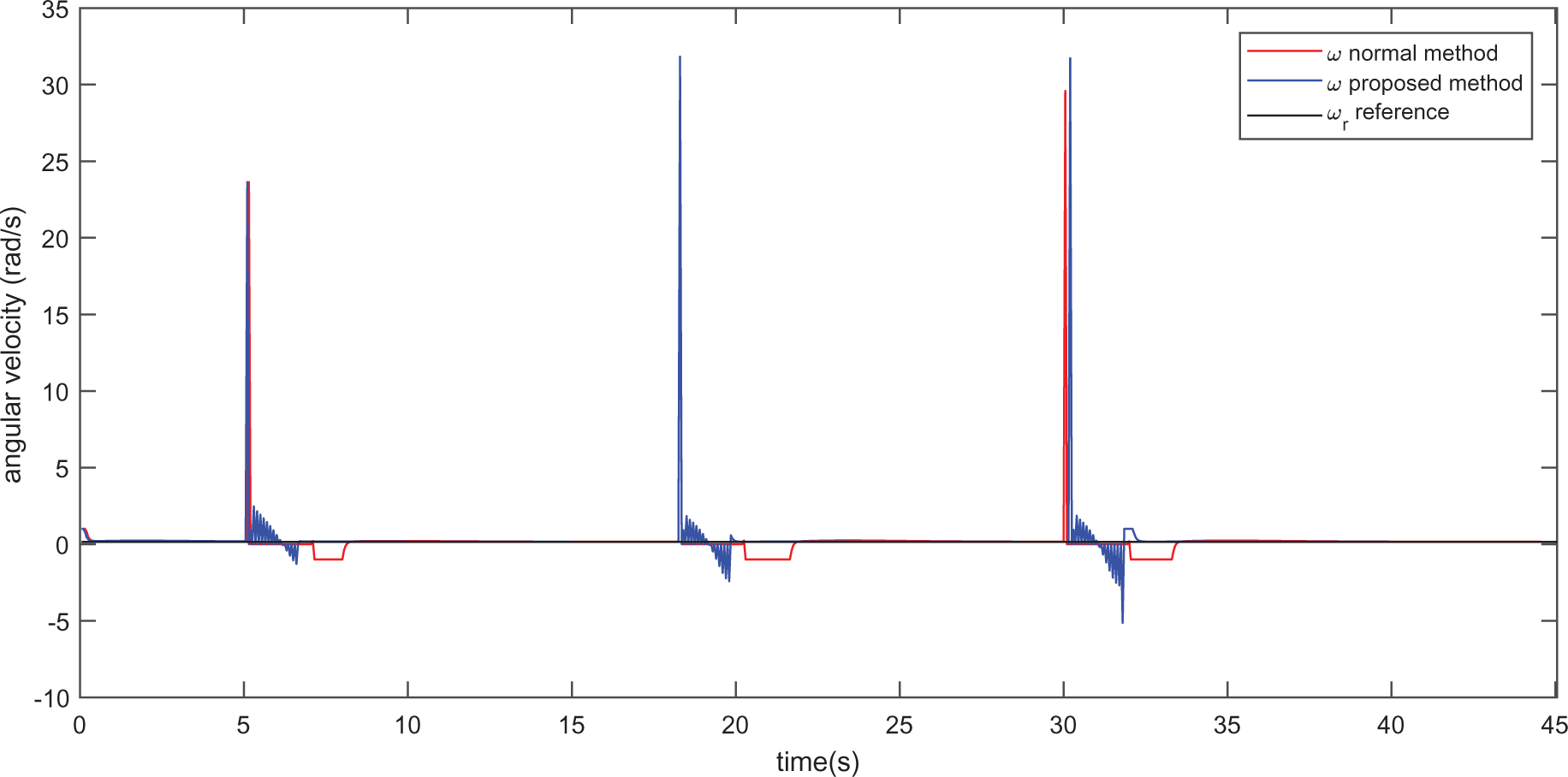
The comparison of angular velocity and reference.
Conservative and regulated avoidance strategies for tracking control
Assuming that the sizes of all obstacles are same and randomly distributed around reference trajectory, the number of obstacles is M = 3, and the radii

The time interval is set as
The adaptive tracking control strategy with obstacle avoidance is represented to compare the performance of both control strategy methods in Figures 12 to 17. The specific control algorithm can be seen in the literature. 28 Figures 12 to 17 show the results which are expressed, respectively, for the tracking trajectory with obstacle avoidance, three error states, linear velocities, and angular velocities.
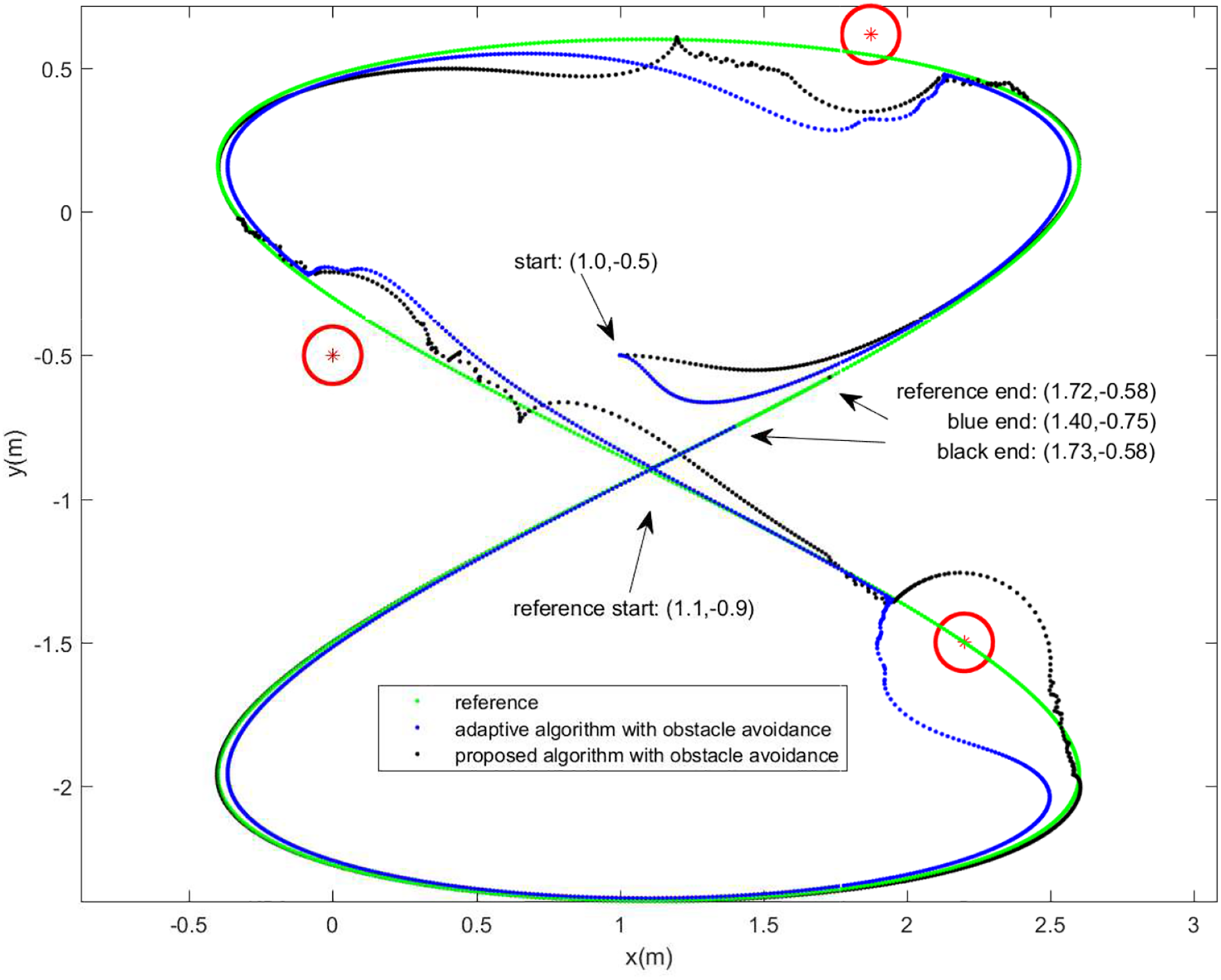
Eight-shape trajectory tracking with avoiding obstacles.
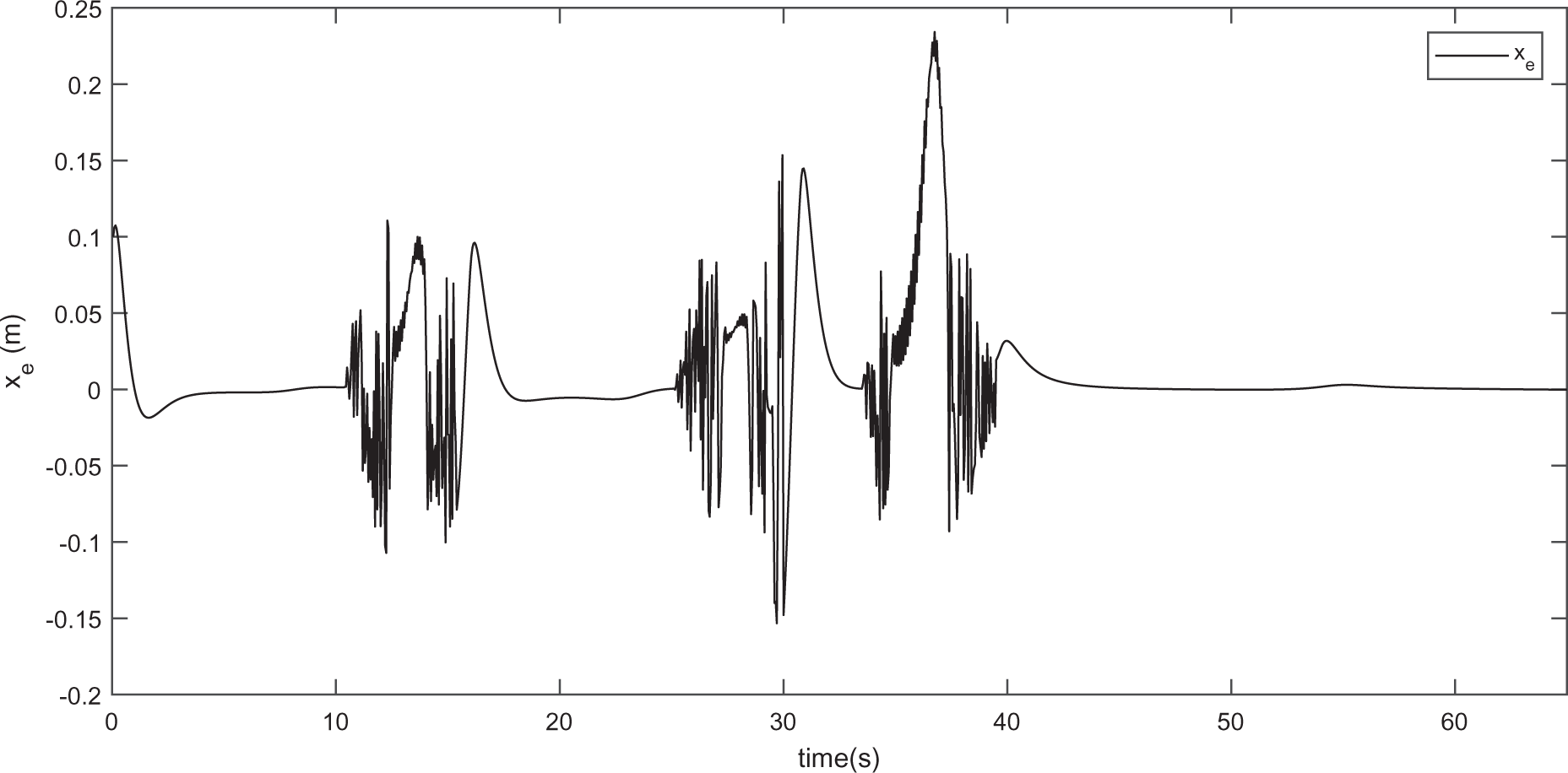
The error state for x position.

The error state for y position.

The error state for orientation.

The comparison of linear velocity and reference.

The comparison of angular velocity and reference.
Figure 12 shows the motion effect of mobile robots for the model predictive tracking control with both control (conservative and regulated) and adaptive control strategies. It can be seen that the trajectory tracking motion of the robot is adjusted obstacle avoidance control, and the multiobstacle synchronous trajectory tracking and obstacle avoidance motion are realized. For the trajectory tracking, both adaptive control and MPC can meet the tracking requirements. MPC is more radical than adaptive control in avoiding obstacles for the motion control of mobile robots. In general, the performance of the proposed method is the same effectiveness as an adaptive control method for obstacle avoidance. Figures 12 to 14 show the variation of error state components of both control strategies. Figures 16 and 17 show the variation of the linear speed and angular velocity control of the robot. Figure 10 shows the change time of the two control strategies for obstacle avoidance.
Conclusions
In this article, we have presented an approach based on discrete-time MPC for tracking and obstacle avoidance control of nonholonomic mobile robots. The simulation validates the effectiveness of the proposed approaches by using the essential obstacle avoidance strategy (conservative control strategy) and both obstacle avoidance control (conservative and regulated control strategies), respectively. It is critical that the control variables of setting avoidance region are constrained by the discrete-time condition. The discrete-time linear systems are used to solve the problem of trajectory tracking and obstacle avoidance. The stability of motion control depends entirely on the structure and parameters of the system. Because the robot motion control environment is complex and changeable in practical applications, we will further study the robot motion control in complex ground environment in the follow-up work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Natural Science Foundation of Hebei Province of China (no. F2017402182) and Science and technology research projects of Colleges and Universities in Hebei, China (no. ZD2018207).