
Abstract
There are many unknown obstacles in the sea, so the autonomous navigation of unmanned surface vehicle needs to avoid them as soon as possible even under the condition of low control ability of the controller. To solve the problem, by combining the dynamic collision avoidance algorithm and tracking control, a dynamic collision avoidance control method in the unknown ocean environment is presented. In this article, in consideration of the unknown ocean environment and real-time dynamic obstacle avoidance problem, the collision avoidance controller using a velocity resolution method and backstepping tracking controller based on unmanned surface vehicle maneuvering motion model is designed. Simulation results show that the method is effective and accurate and can provide the reference for the unmanned surface vehicle intelligent collision avoidance control technology.
Introduction
Unmanned surface vehicle (USV) is a kind of common aquatic vessels which can be used in many different types of navigation missions, such as oceanic environment monitoring, maritime rights protecting, and modern military combat. It shows a good prospect of application and has become the hot research field in the world, Campbell et al. 1 Under the changeable and unstructured ocean environment, anti-collision control is the foundation and precondition during the navigation mission of USV, mainly including autonomous collision avoidance and trajectory tracking, Liu et al. 2 And because of the high speed of USV and the uncertainty of its application environment, it is very important to study the real-time collision avoidance control for USV.
In recent years, numerous scholars have made some research on collision avoidance, such as ant colony optimization (Lazarowska 3 ), evolutionary genetic algorithm (Fan et al. 4 ), finite angle A* algorithm (Yang et al. 5 ), artificial potential field (Xie et al. 6 ), and velocity obstacles (VOs) (Kuwata et al. 7 ; Zhuang et al. 8 ). On this basis, these collision avoidance algorithms have been applied to USV’s autonomous navigation research and have achieved some research results. However, during the real voyage, motion state could be limited by the structure and maneuvering characteristics of USV, which can affect the accuracy and reliability of system (Liu et al. 2 ). And in the study of collision avoidance, few literatures consider these factors. Since most of the collision avoidance algorithms are the algorithm to solve the optimal value, it often requires a lot of iterative time. But the control behavior is real time, so the collision avoidance algorithm needs to be solved quickly and reacts quickly to obstacles in the environment. In this article, the velocity resolution (an improved VOs) method is used to solve the evasion path for the obstacle (especially unknown) and return the desired trajectory.
In the research of tracking control, nonlinear state feedback control (Dong et al. 9 ), sliding-mode control, (Liu et al. 10 ), fuzzy control (Xiang et al. 11 ; Wang et al. 12 ), backstepping method (Liu et al. 13 ; Xiang et al. 14 ), and neural network control (Mu et al. 15 ; Park et al. 16 ) are commonly used. Among them, fuzzy control method about USV is summarized in the work of Xiang et al. 17 For a long time, a considerable number of theoretical and experimental studies have done, and some good achievements are obtained in the aspect of theoretical analysis, algorithm research, and practical application (Liu et al. 2 ). Although so many control algorithms have been proposed successively, the application of the advanced control algorithm is still very few because of the complexity of the actual marine environment.
The collision avoidance focuses on the smoothness of the guided path to reduce the difficulty of tracking control. The tracking control focuses on reducing the tracking error for the set regular path based on the maneuvering characteristics of controlled object. But the autonomous navigation system is composed of the two parts, so this article considers the combination of the two parts to achieve autonomous navigation of USV. Another concern of this article is that the collision avoidance algorithm can guide the USV to avoid obstacles in real time when the tracking control has large error. Therefore, the tracking controller is designed to be a linear tracking algorithm based on backstepping method and the Lanxin USV maneuvering motion model. The simulation results of collision avoidance control show the correctness and effectiveness of the proposed method. It provides reference for dynamic autonomous navigation system of USV.
The rest of the article is organized as follows. The second section introduces the Lanxin USV and establishes the maneuvering model of USV. Based on the collision avoidance algorithm in the third section, combined with tracking control, the fourth section designs a collision avoidance controller for USV. The fifth section is the simulation result verification. Finally, the sixth section concludes the article with summing up comments about the collision avoidance control of USV.
The maneuvering model of Lanxin USV
The Lanxin USV
The object of this research is Lanxin USV of Dalian Maritime University. It is a small fast surface vessel, which has night detective, water sampling, sea rescue, and other functions (Mu et al. 18 ). It is shown in Figure 1.

Lanxin USV on sailing. USV: unmanned surface vehicle.
As a new type of intelligent marine equipment, it is equipped with many advanced equipments, such as attitude detection sensor, Differential Global Positioning System (DGPS) navigation sensor, sonar, Automatic Identification System (AIS), and so on. All the information collected by the sensor is collected to STM32F103ZET6, then these signals will be transmitted to a computer, in which the collision avoidance control algorithm is implemented. The hardware system structure is shown in Figure 2. The hardware system is the premise of controller application. The environmental awareness equipment, such as sonar and AIS, can constantly update the surrounding environmental information for the collision avoidance control algorithm, and the control commands are sent to the executing agencies of the USV through the STM32F103ZET6.

Hardware system structure.
Maneuvering model modeling
The kinematics of the vessel for a three-degree of freedom (3-DOF) planar model can be written as

where
The variable description about vessel motion is shown in Figure 3.

The standard three-DOF planar ship motion variable description. DOF: degree of freedom.
In the process of tracking control, due to the control of closed-loop feedback, the motion of USV is kept near the state of balance, and the sway velocity of the USV is smaller. At this time, it is assumed that the v can be ignored, that is, the speed of USV is

The maneuvering model of the Lanxin USV plane motion is described by the nonlinear Norrbin model, which has been proved to be applicable to podded propulsion Lanxin USV in the work of Mu et al. 18

where K and T are gain constant and time constant, respectively, α is the nonlinear term coefficient. These parameters have been identified in the work of Mu et al.,
15
that is,
Equations (2) and (3) are combined to get the following nonlinear motion mathematical model

Collision avoidance of USV
Dynamic environment modeling
Based on GoodWin dynamic domain model for ship, expand other vessel into a circular of diameter in USV length and regard the circular as the ship domain, Wang et al. 20 If all obstacles are expanded, USV can be regarded as a particle in two-dimensional planes. In addition, due to the large delay and inertia of the USV system, a certain safe distance should be set, and the final expansion result is depicted in Figure 4.

The simulation result of circular trajectory tracking.
In Figure 4,

where
Velocity resolution algorithm
In the RC coordinate system,

The velocities of USV and DO are

In Figure 4, there are two obstacles with different motion conditions, and the collision is judged by the positional relationship between USV and obstacle, Kuwata et al.
7
From the location of USV, two lines tangent to the obstacle area are defined. The angle between the tangent line and the

The angle β between

If
And this algorithm does not require previously known environmental information, that is, it is effective for unknown environments.
Algorithm start time
While ensuring the safety of collision avoidance, it is necessary to maintain the desired trajectory and sailing time as far as possible. Therefore, by calculating the dangerous distance of collision avoidance, algorithm start time can be determined.
Because the speed

Safe distance for dynamic obstacle.
The relative velocity

If the maximum speed and acceleration of the USV along the
Collisions occur in

The safe distance, Dis, calculated earlier is obtained under the conditions of extreme circumstances. This distance is the longest safe distance, and it is safe for other collision avoidance conditions.
The collision avoidance algorithm uses the safe distance, Dis, as the judgment point of the algorithm start, that is, the algorithm starts running when the relative distance between the USV and the DO is less than the Dis.
Return to desired trajectory
After collision avoidance, USV needs to return to the desired trajectory, as shown in Figure 6, where the three points of A, B and C are special path points.

The distribution of trajectory back.
The point A indicates the state of the USV moving to the DO. The point B is the special point where the relative velocity
The point C is the intersection point of the two tangents about the collision avoidance area, and the two tangents are parallel to the

When the USV returns to the desired path, the relative velocity
Due to

where
Simulation of collision avoidance
To verify the effectiveness of this method, we simulate a sea area including numbers of static obstacles and one DO with uniform velocity. The area radius of the static obstacles is between 10 m and 40 m. Table 1 provides the parameters of the DO and USV.
The parameters of the USV and dynamic obstacle.

USV: unmanned surface vehicle; DO: dynamic obstacle.
In addition,

Collision avoidance process. (a) Time 76 s, (b) time 88 s, (c) time 103 s, and (d) time 120 s.
In this process, the distance between the USV and obstacles is shown in Figure 8. There, the minimum distance is 25.4 m at 87 s, which is greater than the safe distance. Therefore, the collision avoidance algorithm ensures the security of USV.

The distance between the USV and obstacles. USV: unmanned surface vehicle.
Design of dynamic collision avoidance controller
Principle of collision avoidance controller
The collision avoidance controller is a combination of collision avoidance algorithm and tracking controller, as shown in Figure 9.

The diagram of collision avoidance controller.
The state information of the USV and environment is transmitted to the collision avoidance algorithm through the sensor system. Based on the desired path, the collision avoidance algorithm outputs the evasion path. The tracking controller controls the USV to track the path and realizes the avoidance of the obstacles.
Tracking controller design
Tracking control includes course control and position control. The coordinate system can be seen in Figure 3. We suppose that the desired tracking trajectory is

where y is the lateral distance.
A state feedback control law is presented using the Lyapunov direct method and nonlinear backstepping with model (15).
First, consider about the subsystem

Here, ψ is regarded as the input of subsystem (16) and the feedback control
The virtual feedback control is shown as follows

where k is some constant greater than zero.
Then

Select the Lyapunov equation

Definitely,

Backward design is shown as follows

Select the Lyapunov equation

When 
Therefore

Definitely,

The last backward design is shown as follows

For the system (26), select the Lyapunov equation

Select the propulsion angle δ as the control input
Then

So, we can get that the system (26) is globally asymptotically stable.
Collision avoidance controller
The collision avoidance algorithm in collision avoidance controller can output the evading path in real time according to the obstacles and track the path through the tracking controller. Even if the tracking controller fails to track the desired path during the control cycle, the collision avoidance algorithm recalculates the desired path according to the current situation. The evasion path is described in Figure 10.

The distribution of evasion path.
The USV starts dynamic collision avoidance at point A, and the desired path is
Because the tracking controller design ignores the position error of the X-axis, the coordinate transformation enables the controller to track any line. In Figure 11, at current time, the desired path is

where

The distribution of transformation of coordinates.
So, the variables of control law (25) change to

Simulation and analysis
Actual marine environment model
The outer sea area of the harbor basin at Dalian Maritime University is selected as the marine environment modeling area. The marine environment in the electronic chart is shown in Figure 12.

The marine environment in the electronic chart.
As the actual marine environment is relatively open, to improve the complexity of the environment, the actual marine environment has been reduced by 20 times. By classifying, extracting, and preserving the contour coordinates of obstacles such as coastlines and islands, the simulated marine environment is shown in Figure 13.
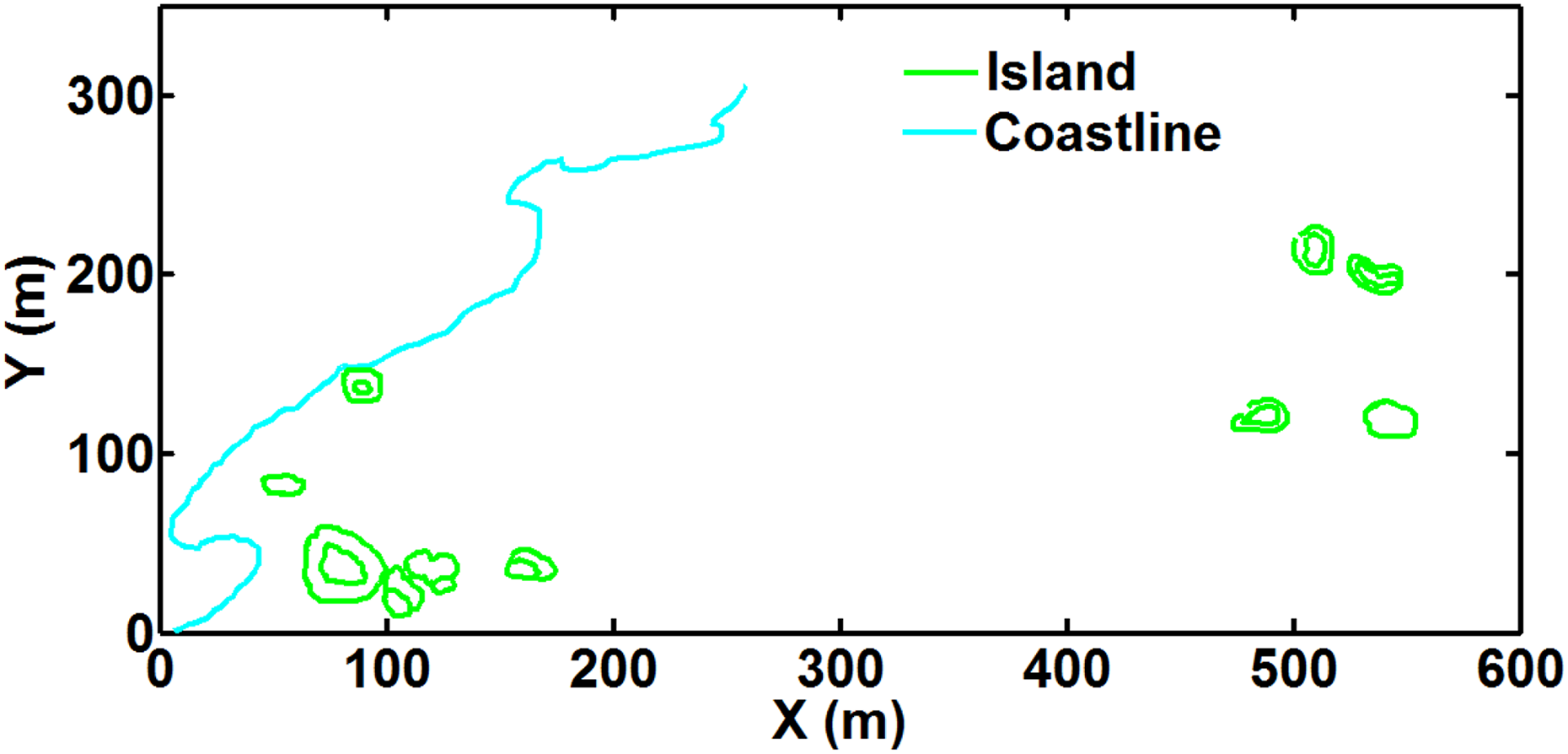
The coastline model after treatment.
These obstacles can be approximated as circles, calculating the center point

where
The simulated marine environment is shown in Figure 14.

The expanded obstacle.
Now, the environment model is completed, which provides the foundation for the Collision Avoidance System (CAS) in real environment.
Simulation verification with single DO
The one DO is added to the static marine environment model, and the parameters of USV and DO are given in Table 2. In addition,
The parameters of the USV and dynamic obstacle.

USV: unmanned surface vehicle; DO: dynamic obstacle.
Figure 15 describes the simulation process. The desired track is the connection from the starting point to the end point. The guidance track is generated by the collision avoidance algorithm in real time according to the environmental information to guide the USV to avoid obstacles. In Figure 15(a), the USV navigates according to desired track and avoids static island groups. When the USV is returning to the desired track, the DO in the left side is detected with the possibility of collision, so the course is quickly changed to avoid the obstacle. Figure 15(b) shows that the USV successfully completes the DO avoidance. Finally, in Figure 15(c), the USV completes the collision avoidance of all obstacles on the desired track and returns to the desired track to reach the destination safely.

The process of collision avoidance control in sea environment. (a) Time 23 s, (b) time 27 s, and (c) Time 64 s.
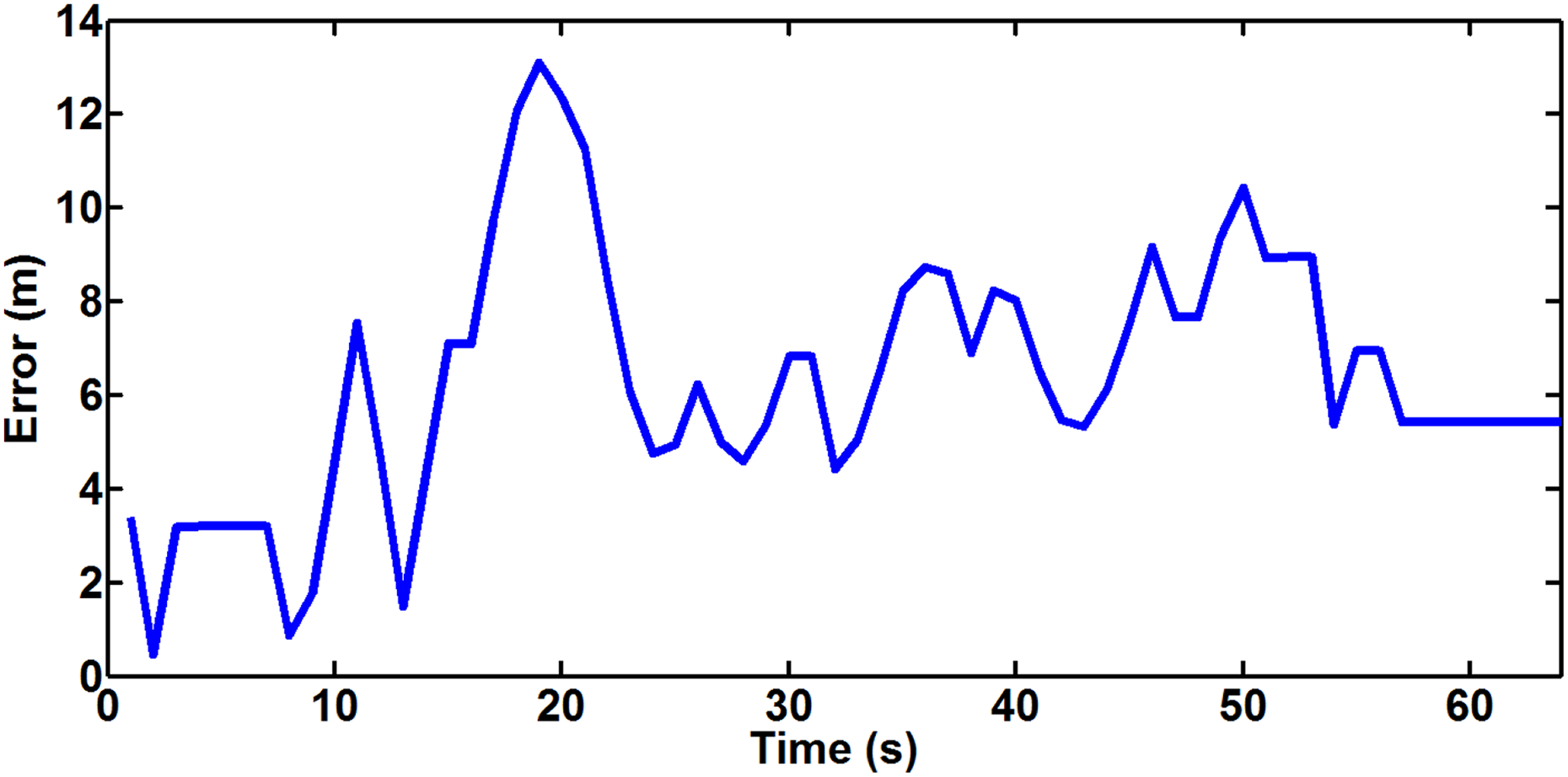
Figures 16 and 17 show the result of the evaluation of the process, and the red dashed line is the instruction path, and the dotted line is the desired path. The distance between the USV and obstacles is shown in Figure 16. At 29 s, the minimum distance is 32.1 m. The maximum error caused by the tracking controller is 13.1 m at 19 s, as shown in Figure 17. Although the tracking controller has made great errors, the final system ensures the safety of USV.
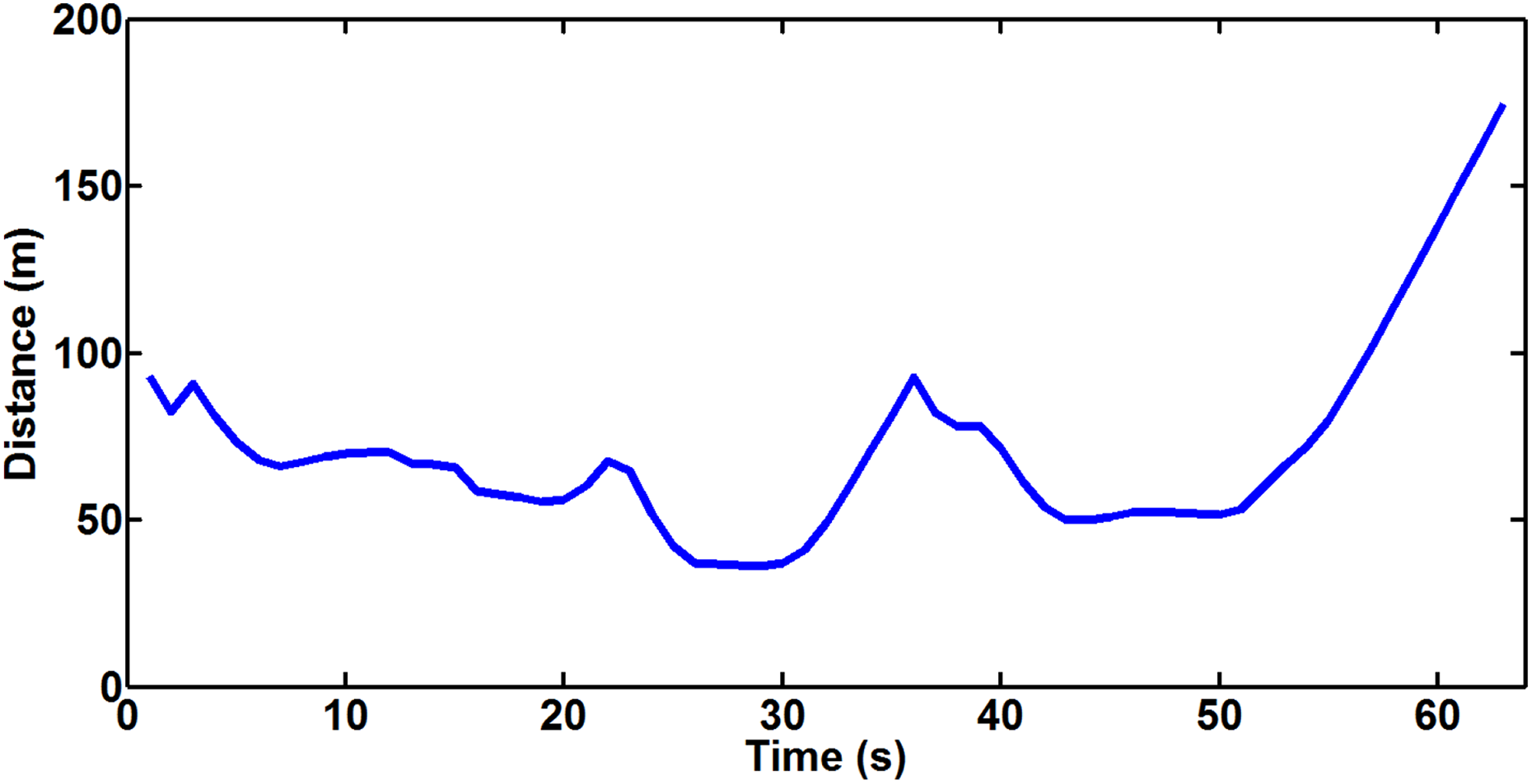
The distance between the USV and obstacles. USV: unmanned surface vehicle.

The error of controller.
Simulation verification with multiple DOs
Figure 18 shows the simulation result of collision avoidance control for their DOs (DO1, DO2, DO3). Table 3 lists their parameters. The other parameters are consistent with the simulation of single DO.
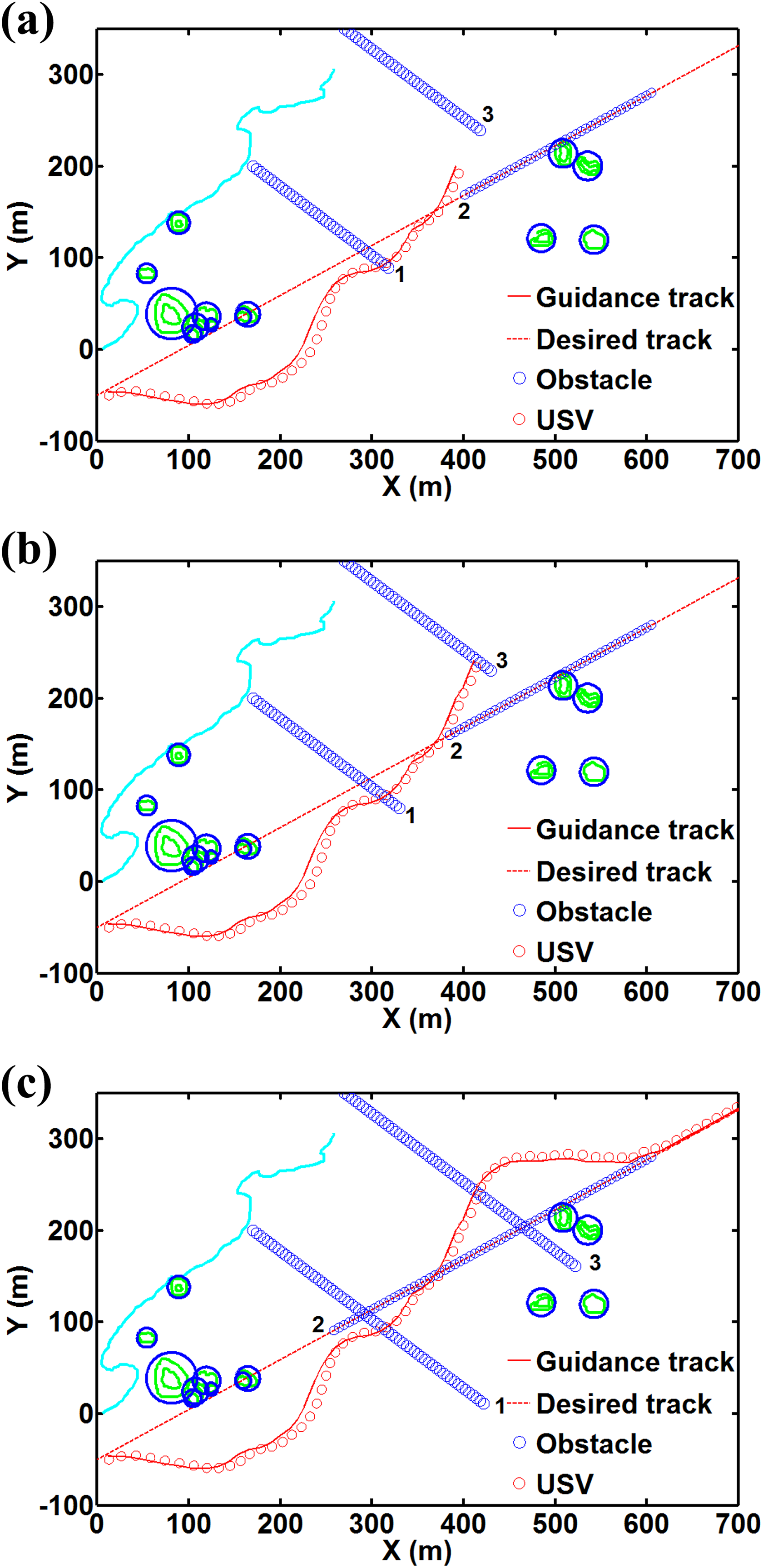
The simulation result of multiple collision avoidance. (a) Time 38 s, (b) time 41 s, and (c) time 64 s.
The parameters of the USV and the dynamic obstacles.
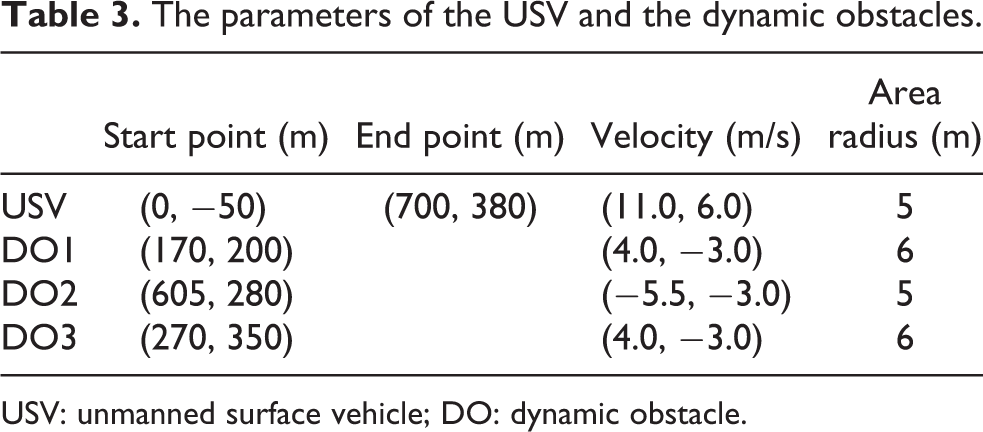
USV: unmanned surface vehicle; DO: dynamic obstacle.
Since DOs 2 and 3 are added on the basis of the single DO, Figure 18(a) and (b) shows the scenarios of avoiding them. Finally, Figure 18(c) describes that USV completes the whole collision avoidance process and back to the desired trajectory.
The distance and error curves are shown in Figures 19 and 20. As a result of avoiding multiple DOs, the minimum value of the distance curve is reduced to 15.3 m at 40 s. And the error curve is basically consistent with the single DO scenario. Through simulation, we can see that the system can still ensure safety under the condition of multiple DOs.
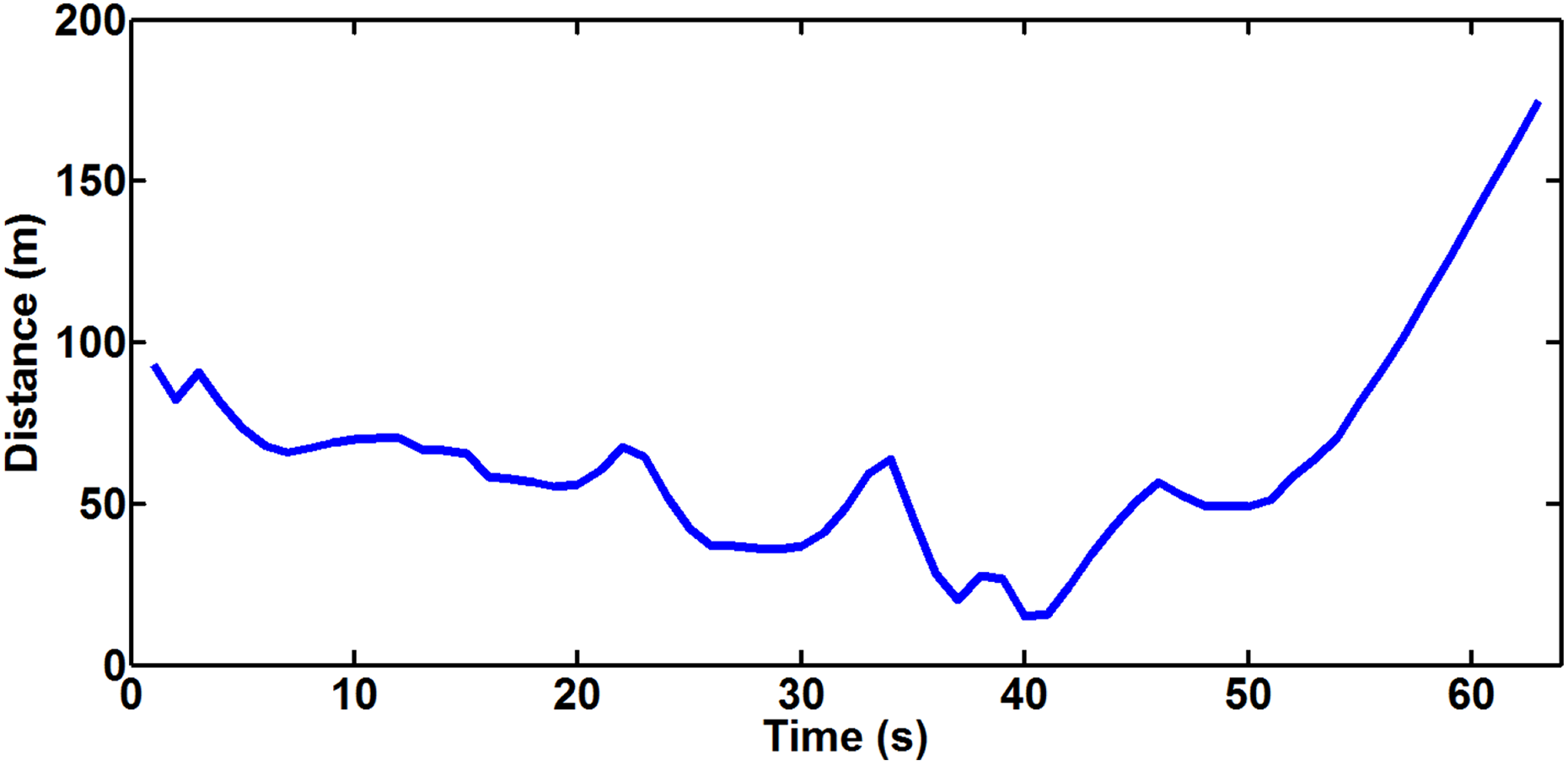
The distance between the USV and obstacles. USV: unmanned surface vehicle.
The error of controller.
Conclusions
The autonomic collision avoidance control is the basis and precondition for safe navigation and designated task in unknown ocean environment. To solve the problem, this article combines collision avoidance algorithm and tracking control and proposes a collision avoidance control system according to the maneuver characteristics of Lanxin USV. First, a velocity resolution method for obstacle avoidance is designed based on the VO method. It can detect collision in real time and solve the evading path quickly. Then, a linear tracking control algorithm is designed according to the identified response model of Lanxin USV and backstepping algorithm. Through coordinate transformation, the tracking control and collision avoidance algorithm are combined to complement each other and get the collision avoidance control system. Finally, the simulation experiments proved the feasibility and the validity of this system.
This article mainly discusses the real-time collision avoidance control method, which is suitable for the dynamic collision avoidance of USV in local environment. In the future research, it is necessary to study the collision avoidance problem in the global environment, so that the USV has the optimal path planning ability for known environmental information.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the Nature Science Foundation of China under grant 51609033, the Nature Science Foundation of Liaoning province of China under grant 20180520005, and the Fundamental Research Funds for the Central Universities under grants 3132018306 and 3132016312.