This article introduces a 3-D multi-robot chasing controller to make a team of robots get closer to a target while not being observed by the target. Assume that the target has sensors, such as radar or sonar, to observe an incoming vehicle. In the team, one robot, the leader, has a stealth capability such that it is not observable by the sensors of the target while getting closer to the target. The leader is controlled such that it chases the target while remaining at the same bearing line from the target to the leader. Considering the case in which the target can only measure optical flow, the target can hardly observe the leader’s motion. We control every robot, other than the leader, such that a detection pulse signal generated from the target’s sensor reaches no robot, since the signal is attenuated by the stealth leader. In this manner, even if multiple robots approach the target, the target observes no robot. We prove that under our 3-D multi-agent control with some condition satisfied, multiple robots can approach the target in a stealthy manner while avoiding colliding with each other. In this article, we use simulations to demonstrate the effectiveness of our 3-D multi-agent controller.
Recently, stealth vehicles are built, employing stealth technology so that they are harder to be observed by sensors, such as radar or sonar. A stealth vehicle can absorb a detection pulse signal generated from sensors, such as radar or sonar.1
Consider the problem of employing a team of robots for chasing a target.2–6 This article considers a scenario of making multiple robots get closer to a target while not being observed by the target. Usually, a robot with stealth technology is expensive. Thus, utilizing many stealth vehicles is not desirable considering cost.
This article presents a 3-D multi-robot chasing controller to make a team of robots get closer to a target while not being observed by the target. The target has sensors, such as radar or sonar, to observe an incoming vehicle. Among the team members, one robot, the leader, has a stealth capability such that it is not observable by the target’s sensor while getting closer to the target.
The leader is controlled such that it gets closer to the target while remaining at the same bearing line from the target to the leader. Many insects and animals utilize this motion camouflage control to chase their prey.7–10 Considering the case in which the prey can only measure optical flow, this motion by the pursuer is hardly observable by the prey.10
Reddy et al.11 developed a 3-D controller to perform this kind of motion camouflage. Under the controller,11 it was proved that the pursuer converges to the motion camouflage state in three dimensions. In this article, the controller in the study by Reddy et al.11 is utilized to control the leader.
The leader is a stealth vehicle such that the target’s sensor cannot measure the leader’s position. We acknowledge that the types of stealth vehicles currently being built are underactuated vehicles, such as submarines and airplanes. These underactuated vehicles have kinematic and dynamic constraints on their motion. Since the controller in the study by Reddy et al.11 was developed considering a holonomic vehicle, the controller11 may not be able to make the leader converge to the motion camouflage state in the case where the leader is an underactuated vehicle.
Note that we can build a holonomic stealth vehicle by making a holonomic vehicle absorb a detection pulse signal.1 This article assumes that every vehicle is a holonomic vehicle. In fact, this holonomic vehicle assumption is commonly utilized in many papers on multi-robot systems.12–19
We control every robot, other than the leader, such that a detection pulse signal generated from the target reaches no robot, since the signal is attenuated by the stealth leader. In this manner, even if multiple robots approach the target, the target observes no robot. Let a follower denote a robot that is not the leader. Each follower is controlled such that it converges to the bearing line connecting the target and the leader while getting closer to the target. In this manner, a follower can “hide” behind the stealth leader while approaching the target. This article proves that under the proposed 3-D chasing controller, a follower approaches the target while not being observed by the target.
There are many papers on multi-robot systems.12–23 Multi-robot systems have various potential applications such as leader-based multi-robot herding,24 sensor node deployment,12,20,21,23,25 and collective transport of robots.26 Zhang and Leonard18 developed formation controllers to improve source seeking utilizing distributed sensors. Previous studies2–6 considered the problem of employing a team of robots for tracking one or more targets. Researchers2,5 handled cooperative control of a team of robots to estimate the position of a moving target. Our article proposes 3-D control laws to make multiple robots get closer to the target while not being observed by the target. As far as we know, this kind of multi-agent control in 3-D environments has not been handled in the literature on multi-agent systems.
Various controllers have been developed to make a vehicle track a path.27–29 Line-of-sight (LOS) guidance controller has been widely utilized to make the vehicle follow a path in a robust manner.27,29 LOS guidance controller was developed to make the vehicle converge to the path in the case where the cross-track error (the distance to the path) is not zero. Our multi-robot chasing controller is developed inspired by LOS guidance controllers.27–30
In our multi-agent control laws, the leader and followers utilize sensors, such as GPS, to localize themselves, respectively. Also, the leader information (position and velocity) is transmitted to every follower so that each follower can predict the leader location after one-time step in the future.
In our multi-agent control laws, the leader utilizes various sensors, such as radar or sonar, to access the target position in real time. The leader then predicts the target location within one time step in the future. Prediction of target’s location is not easy, since it is associated to the target’s maneuvers. Moreover, sensor measurement noise exists as the pursuer measures the target’s location in real time. Third section thus introduces a curve fitting approach to predict the target’s location one step forward in time considering noisy sensor measurements.
We prove that under our 3-D multi-agent control laws, a robot can get sufficiently close to the target while not being observed by the target. Collision avoidance must be assured as multiple robots approach the target. Thus, this article proves that under our 3-D multi-agent control with some condition satisfied, multiple robots avoid colliding with each other. Simulations are utilized to demonstrate the effectiveness of our 3-D multi-agent controller.
The article is organized as follows: second section introduces assumptions and definitions in our article. Third section introduces a curve fitting approach to predict the target’s location one step forward in time considering noisy sensor measurements. Fourth section presents the proposed 3-D multi-agent controller. Fifth section introduces simulations to demonstrate the effectiveness of our 3-D multi-agent controller. Sixth section presents conclusions.
Assumptions and definitions
We discuss assumptions and definitions utilized in this article. This article considers a team of robots composed of one leader and one or more followers in 3-D. is the leader’s speed, and vf is a follower’s speed. vt is the speed of the target. In this article, each robot in 3-D is simplified as a sphere. is the leader’s radius. Also, Rf is a follower’s radius.
In the team, the leader has a stealth capability such that it is not detected by sensors, such as sonar or radar, while getting closer to the target. The leader is controlled such that it chases the target while remaining at the same bearing line from the target to the leader. To control the motion of the leader, we use the 3-D chasing control law in Reddy et al.’s study.11
To simulate the motion of the target, we use Frenet–Serret frames,11,31 Which is discussed in the fifth section.
The purpose of our article is as follows: design controllers for each follower so that each follower get sufficiently close to the target in an unobservable manner, so that the robot can monitor the target state closely. We assume that and that . We further assume that the sensing range of each follower is bigger than . Here, T is the sampling time interval of our 3-D chasing controllers. Once the distance between the target and a follower is less than , then the follower can monitor the target state utilizing on-board sensors. Thus, we develop a follower’s controller so that the distance between the target and the follower decreases to be less than , while the follower is not observed by the target.
Suppose that there are N followers. Fi is the i th follower, where . L is the infinite line intersecting both the target and the leader.
The subscript k is utilized to represent the time index k in discrete-time systems. is the 3-D location of Fi at k th time index. is the target’s 3D location at k th time index, and is the leader’s 3-D location at k th time index. represents the infinite line intersecting both and .
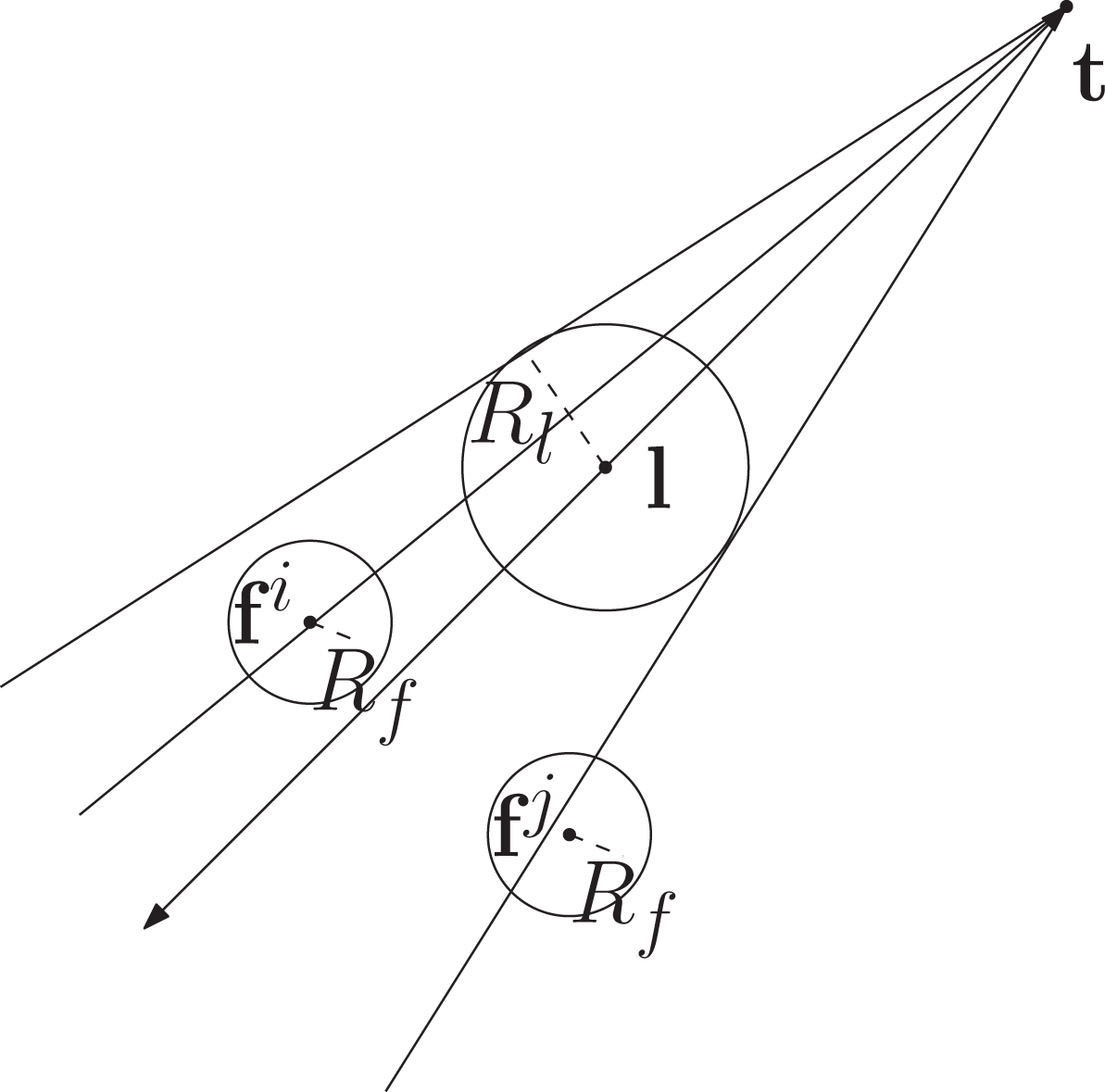
Since a follower can predict both and , a follower can access . is the 3-D point on , which is the closest to . Also, is . is the angle formed by and . In other words, . Here, exists between 0 and π, satisfying that .
denotes the heading point of Fi at time step k. This implies that at each time step k, Fi heads toward . The definition of in the situation where is distinct from that of in the situation where . In the situation where , is defined as . In the situation where , is defined as the point on , which is distance from and is on the line segment whose two end points are and , respectively. Figure 1 illustrates in the situation where .
In the situation where , is on .
We say that collision avoidance between two vehicles is assured if the relative distance between the two vehicles is bigger than . This implies that denotes the minimum separation between two vehicles for collision avoidance.
Conditions for unobservable state
Among all robots, only the leader has a stealth capability such that it is not observed by the target’s sensors while chasing the target. Every robot, other than the leader, is controlled such that a detection pulse signal generated from the target’s sensor reaches no robot, since the signal is attenuated by the leader. In this manner, the target observes no robot while multiple robots chase the target.
Considering the volume of each robot, a detection pulse signal generated from the target cannot reach Fi if the below condition is met.
Fi is unobservable if equation (1) is met. If equation (1) is met at k th time index, then we say that Fi is in the unobservable stateSs at k th time index. This indicates that Fi is not observable by the target’s sensor while Fi chases the target.
Figure 2 illustrates the situation in which Fi is unobservable. A detection pulse signal generated from the target cannot reach Fi, attenuated by the leader. Therefore, Fi is not observable by the target’s sensor. But, Fj is observable by the target’s sensor, due to the fact that a detection pulse signal can reach Fj.
Fi is in the unobservable state. But, Fj is observable by the target’s sensor.
Predict the target position one step forward in time considering noisy environments
The leader uses sensor measurements to derive the target’s location in real time. Then, the leader at time step k predicts using the curve fitting method in this section.
Prediction of
We utilize curve fitting methods for recent target positions: . Here, . This indicates that we need more than two measurements.
Recent x coordinate of the target are as follows. . We fit using the following second-order polynomials: . This second-order polynomials represent the x coordinate trajectory of the target within recent K time steps.
We utilize the following matrix to solve this curve fitting problem
Here, ,
We solve for S using pseudo-inverse methods as follows
is the estimate of . Let denote the j th element in . Since , . Thus, we predict the x coordinate of as follows
where .
Similarly, we can estimate the y coordinates of using the following second-order polynomials: . Also, we can estimate the z coordinates of using the following second-order polynomials: . This curve fitting approach requires more than two measurements. In other words, we need . Since the target has been moving before time step 0, we have more than one measurement.
If we have only two measurements (), then we set
where . Equation (5) indicates that we fit two measurements using the first-order polynomials.
The multi-agent controller
In this section, we discuss our 3-D multi-agent controller in detail. At each time index k, the controller for Fi is as follows
The above controller implies that Fi moves toward its associated heading point at each time step k. Since exists on and is on the line segment whose two end points are and , respectively, Fi gets closer to both and the target. In the situation where , Fi moves toward . Figure 3 illustrates this situation. This implies that a follower moves to “hide” behind the leader as fast as possible. In the situation where , is on . Figure 1 illustrates this situation. This implies that a follower “hides” behind the leader completely.
In the situation where , is not on .
We next present the analysis of the proposed controller. In this analysis, we do not consider target prediction error presented in the third section. In other words, we assume that the predicted target state is identical to the true target state .
Stability analysis
Under our 3-D multi-agent controller (equation (6)), each follower gets closer to L while chasing the target. See Figures 1 and 3. Since a follower gets closer to L, we encounter a situation where at a certain time step ki. (Assume that all robots are positioned close to each other initially. For instance, we can consider the case where all robots are launched from one platform, such as a submarine or an airplane. In this case, is feasible for all . Hence, it is feasible that ki is zero for all .)
Once occurs, is on Lk for all under our 3-D multi-agent controller (6). This is presented as the following theorem.
Theorem 1
Consider the situation where at a certain time step ki. Then, is on Lk for all . Furthermore, for all
Proof
Consider the situation where . In this situation, is on under our multi-agent controller (6). See Figure 1.
Induction is utilized for our proof. Consider the situation where . Suppose that is on . It is next proved that and that is on .
is parallel to . is the distance between and . The target located at reaches within one time interval. It is assumed that and that . Therefore, . In this situation, is on under our 3-D multi-agent controller (6).
Utilizing induction, we proved that is on Lk and that for all . □
Theorem 1 proved that if at a certain time step ki, then is on Lk for all under our 3-D multi-agent controller (equation (6)). This implies that a follower “hides” behind the leader completely. Note that even if a follower “hides” behind the leader completely, the follower may be detected by the target depending on the size of the follower. We have Theorem 2 to discuss the condition for becoming unobservable.
Theorem 2
Consider the situation where at a certain time step ki. Under our 3-D multi-agent controller (6), Fi at time index is unobservable if .
Proof
Fi is unobservable if equation (1) is satisfied. Consider the situation where . is on Lk for all utilizing Theorem 1. Furthermore, for all utilizing Theorem 1.
Since for all , under our 3-D multi-agent controller (6). See Figure 1. Recall that equation (1) is the condition for becoming unobservable. Since in equation (1) is zero, Fi is unobservable at time index k if , which proves this theorem. □
Corollary 1 shows convergence of our 3-D multi-agent controller under two assumptions. We first assume that a follower is not bigger than the leader. The second assumption is that . This assumption is required to make a follower hide behind the leader with stealth capabilities so that the follower is not detected by the sensors of the target.
Corollary 1
Fi maneuvers under our 3-D multi-agent controller (6). Consider the situation where at a certain time step ki. at each time index . In addition, . Then, Fi is unobservable at each time index .
Proof
and at each time index . Under Theorem 2, Fi is unobservable at time index k in the situation where . This situation is satisfied utilizing the assumptions presented in this corollary. Thus, utilizing Theorem 2, Fi is unobservable at each time index . □
Convergence analysis
Besides achieving motion camouflage, the follower must approach the target until satisfying that the distance between the target and the follower is less than .
Suppose . Then, utilizing Theorem 1, Fi is on Lk at each time index .
The following theorem proves that as the time index increases from ki, the distance between the target and Fi monotonically decreases until it is less than .
Theorem 3
Suppose that . As the time index increases from ki, the distance between the target and Fi monotonically decreases until it is less than .
Proof
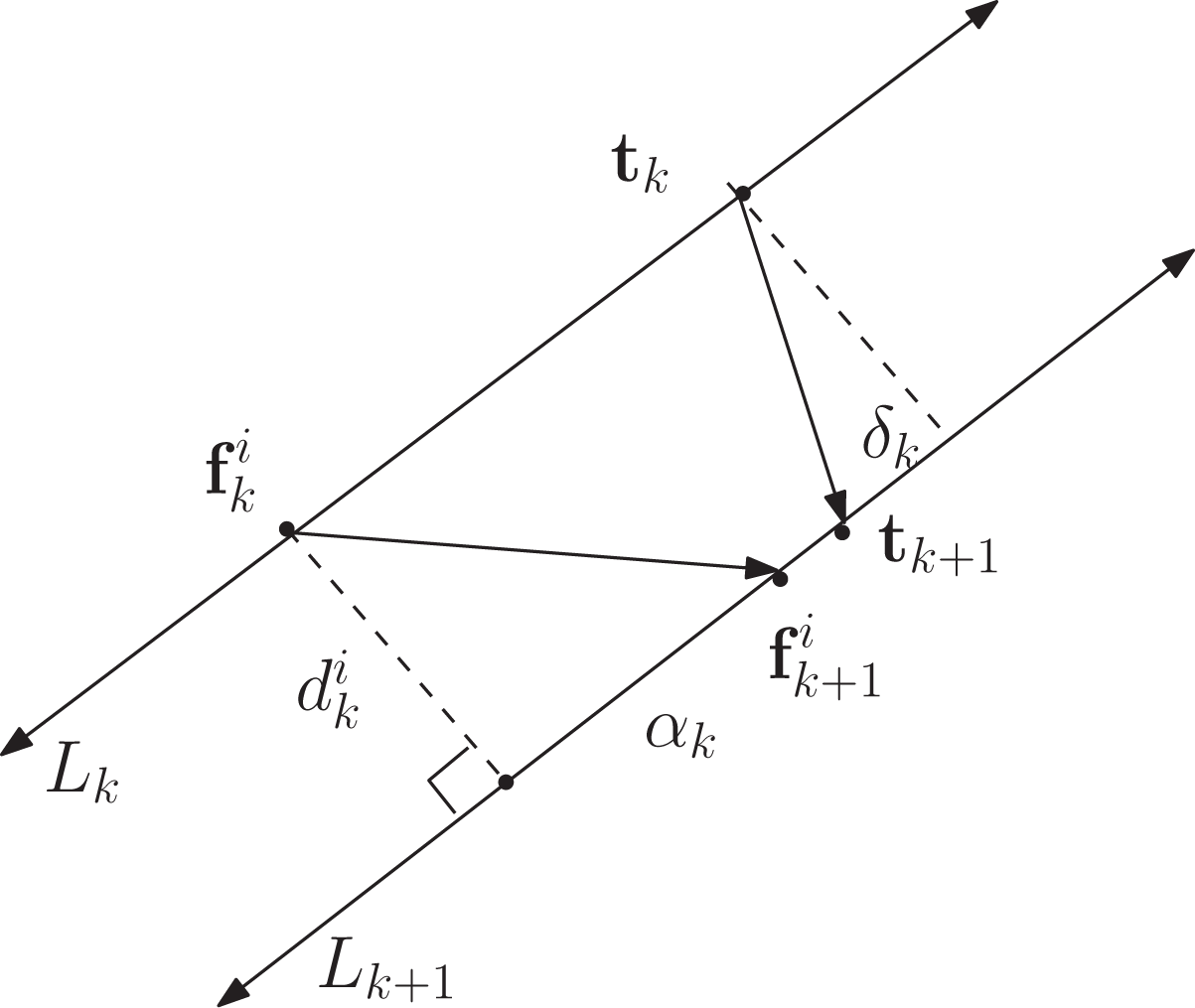
Suppose that . Utilizing Theorem 1, Fi is on Lk at each time index . Dk is the distance between the target and Fi at time index k. We will prove that for each time index .
We introduce two concepts beforehand. , and . Figure 4 illustrates these two concepts.
An illustration of and . The target at time index k moves away from the robot.
First, consider the case where the target at time index k moves to increase the distance between it and the robot. See Figure 4 for an illustration of this case. Since Lk is parallel to , the geometry in Figure 4 yields
Since , in equation (7) is positive. Thus, we have
Next, consider the case where the target at time index k moves to decrease the distance between it and the robot. See Figure 5 for an illustration of this case. Similar to equation (7), we have
in equation (9) is positive. Thus, we have equation (8).
An illustration of and . The target at time index k moves to decrease the distance between it and the robot.
Utilizing equation (8), Dk monotonically decreases as k increases. Thus, there exists a time index such that and that .
Equation (11) implies that the relative distance between and is less than . Here, is a time step such that and that becomes negative. □
Collision avoidance analysis
We introduce several concepts utilized in collision avoidance analysis between two robots, Fi and Fm. Let denote a 3-D plane containing both and . This plane is depicted on Figures 1 and 3. In the plane, the origin is . Also, the x-axis is along in the direction of , and the y-axis is in the direction of . x-axis and y-axis are drawn on meeting the below conditions:
The origin is , and x-axis intersects y-axis at .
The y coordinate of in is .
The x coordinate of in is positive.
x-axis is perpendicular to y-axis.
Let denote the x-coordinate of on . Since is the origin of , . In addition, let denote the y-coordinate of on . Since the y coordinate of in is , we have .
Let denote a 3-D plane containing both and , such that is the origin. and share . x-axis and y-axis are drawn on meeting the below conditions:
x-axis intersects y-axis at .
x-axis is perpendicular to y-axis.
The y coordinate of in is .
The x coordinate of in is positive.
Let denote the x-coordinate of on . Since is the origin of , we have
Moreover, let denote the y-coordinate of on .
Theorem 1 proved that if at a certain time step ki, then is on Lk where . This implies that is on Lk where . Also, is on Lk where . Thus, both and are on Lk where . Let for convenience.
Theorem 4 proves that Fi avoids colliding with Fm at every time index .
Theorem 4
Suppose that and that both and are on . Then, we have for all . Also, both and are on Lk for all
Proof
Suppose that and that both and are on .
Let k denote a time index bigger than . We prove by induction. Suppose that and that both and are on Lk. We will prove that and that both and are on .
Utilizing Theorem 1, both and are on . Since is parallel to Lk, is also parallel to under our multi-agent controller (6). Thus, is identical to , as depicted in Figure 6. This implies that
which proves this theorem. □
is parallel to Lk, and is parallel to .
Suppose that both and are on . Then, they avoid colliding with each other for every time index utilizing Theorem 4. But, we acknowledge that collision between Fi and Fm may occur if one of these two robots has not converged to the bearing line L yet.
Theorem 5 proves that under our multi-agent controller (equation (6)).
Here, we utilized the fact that and share the identical x-axis.
Next, consider the situation where is . Utilizing equation (15), we have
We can further derive equation (17) utilizing both equations (14) and (18). We proved this theorem. □
Utilizing Theorem 5, the following statement holds: if , then we have . Utilizing equation (12), further implies that . This further implies that under our controller (6). Thus, Fi avoids colliding with Fm at time index .
Lemma 1 provides conditions to achieve collision avoidance between Fi and Fm under our controller.
Lemma 1
Let k denote the current time index. Fi and Fm avoid colliding with each other within time indexes in the future under our controller (6).
Proof
Let k denote the current time index. Utilizing Theorem 5, we have
To avoid collision between Fi and Fm within n time indexes in the future, must be bigger than Cd. This is satisfied if . Utilizing equation (12), further implies that .
Fi and Fm avoid collision within n time indexes in the future. We proved this lemma. □
We acknowledge that the collision avoidance cannot be guaranteed when pursers have not converged to the bearing line L. The following theorem states that in the case where two pursuers Fi and Fm converge to the bearing line L within a time interval given by , then the collision avoidance can be assured for the two pursuers.
Theorem 6
Suppose that both and are on . If , then Fi and Fm do not collide with each other utilizing our controller (6).
Proof
Utilizing Lemma 1, Fi and Fm avoid colliding with each other within time indexes in the future under our controller (6). Suppose that both and are on . Theorem 4 proves that Fi avoids colliding with Fm for each time index .
If , then is sufficiently large to satisfy the following statement: under our controller (6), Fi and Fm do not collide with each other at every time index. □
Simulations
We demonstrate the effectiveness of our 3-D multi-agent controller utilizing simulations. The leader and five followers maneuver with speed 0.6. distance units, and . and . This implies that the size of a follower is equal to that of the leader. The target’s initial location is (0,0,30). The leader’s initial location is (0,0,0). The initial locations of all followers are ,, , , and , respectively.
We examine whether Fi is unobservable by accessing . is derived utilizing equation (1). If is positive, then Fi is unobservable at time index k.
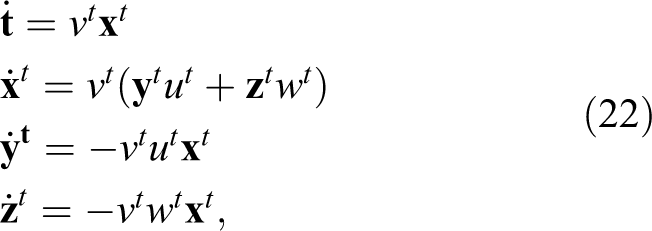
We control the leader utilizing the 3-D chasing controller in the study by Reddy et al.11 To simulate the target movement, we utilized Frenet–Serret frames11,31 as follows
where the natural curvatures ut and wt are target’s controllers. is 0.5, which is slightly smaller than . is the target’s 3-D location. Note that is natural Frenet frame (relatively parallel adapted frame) for the target’s trajectories.11
We give the target two behaviors: (1) if the target detects a follower, then the target moves in the opposite direction to avoid capture and (2) if the target detects no followers, then the target moves using its predefined and . Each simulation continues until the relative distance between the leader and the target is smaller than distance units.
Noiseless simulations
represents sensor noise and is a vector with three elements. In this subsection, we consider noiseless sensing. Thus, , and the target prediction is accurate, that is, at each time step k.
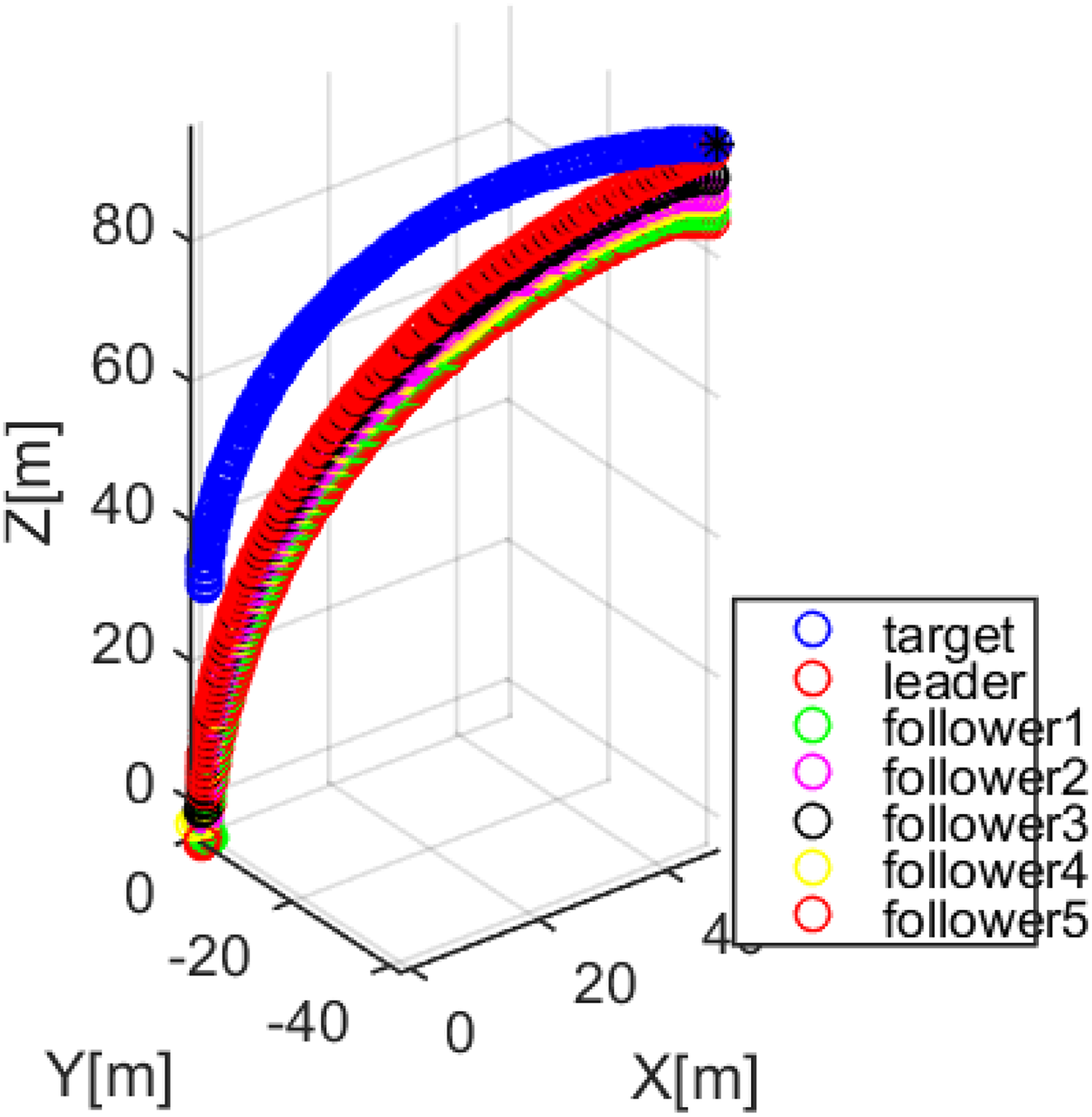
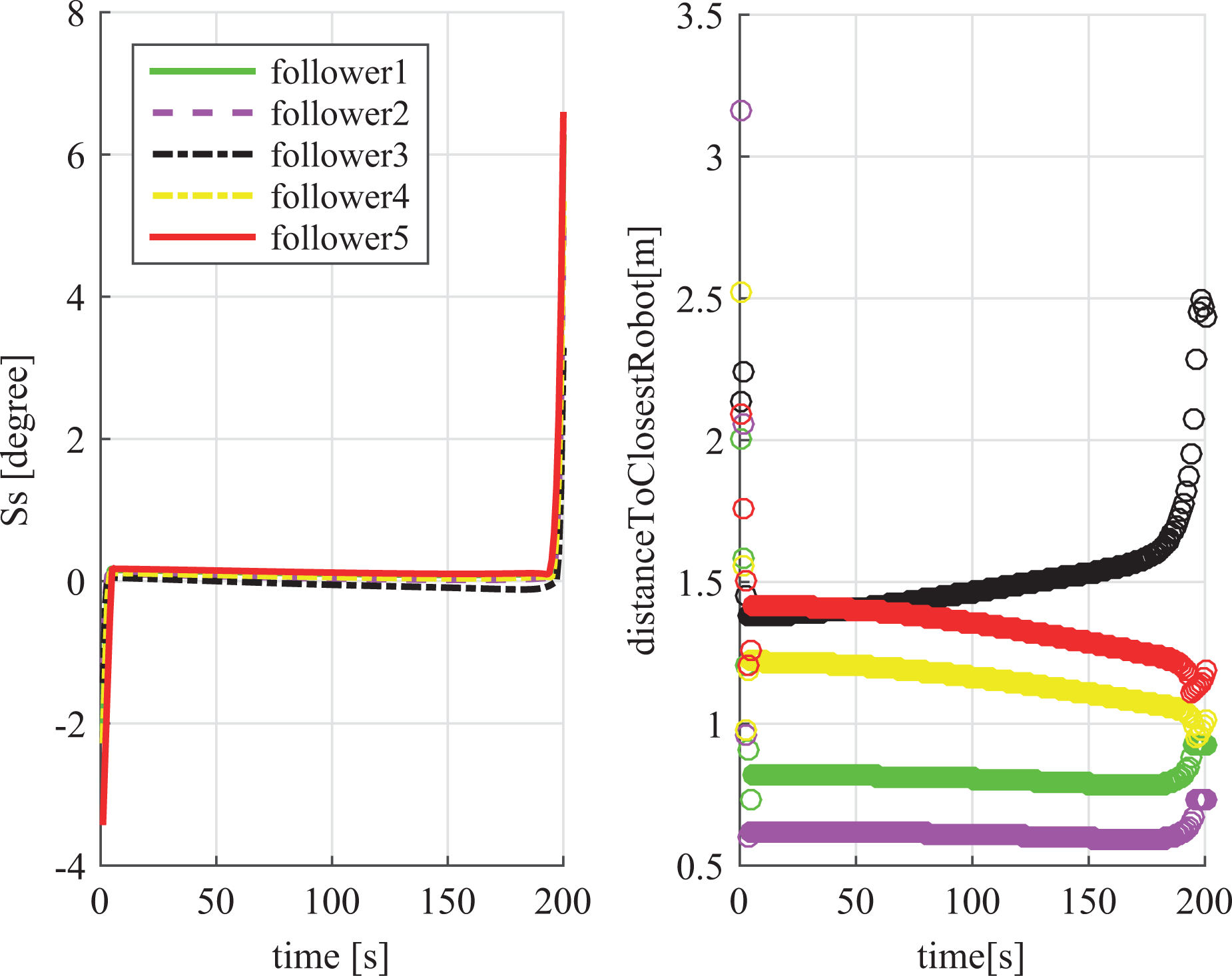
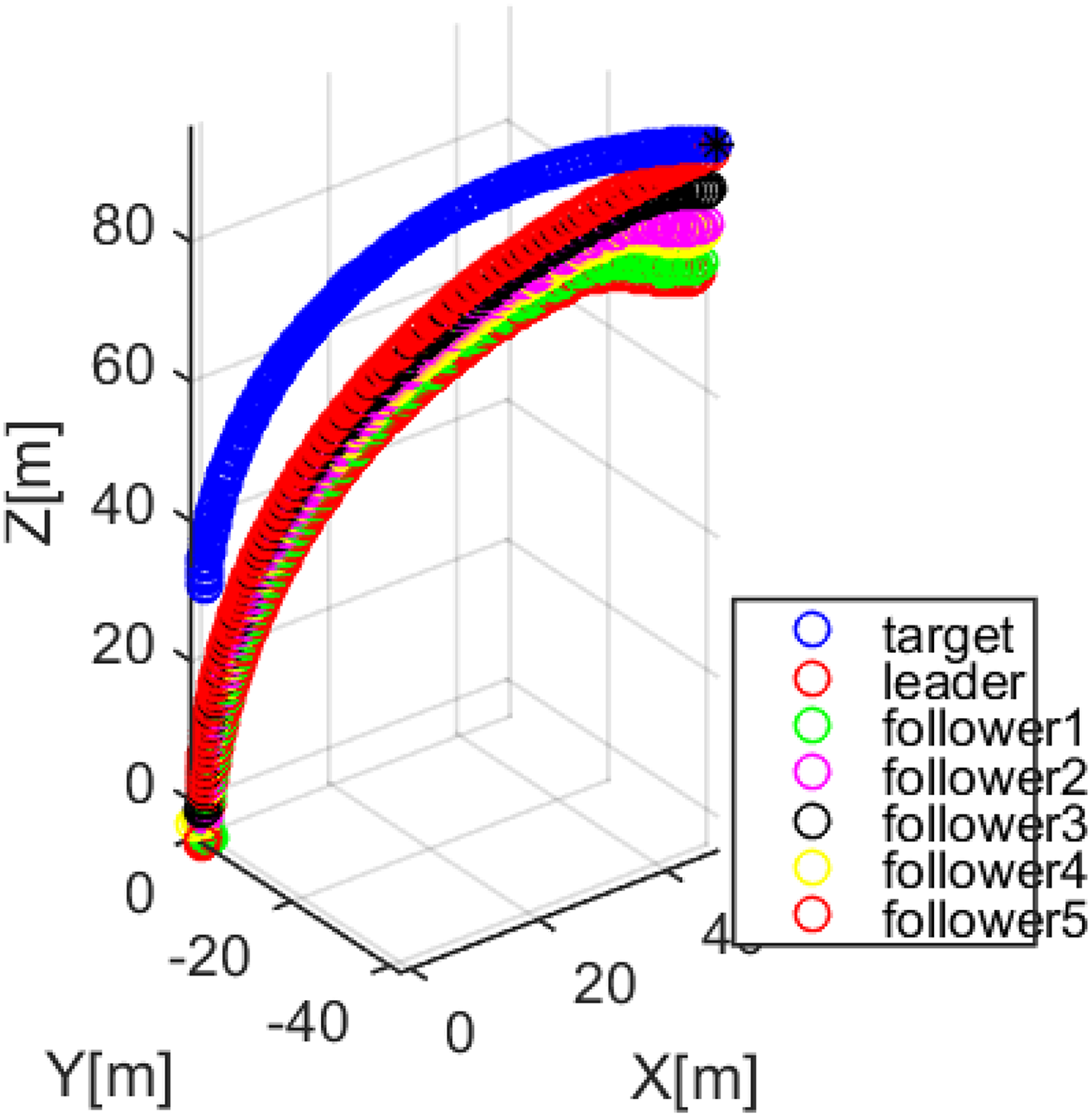
Figure 7 shows how the system behaves when and in equation (22) are 0.01 and −0.01, respectively. Considering the scenario in Figure 7, Figure 8 presents Ss with respect to time index. Ss of each follower is negative initially, which implies that a follower is detected by the target initially. Ss of each follower becomes positive as time index increases. This indicates that every follower becomes unobservable as time index increases. Figure 8 further shows the distance between a follower and its closest robot with respect to time index. See that collision avoidance is assured for each robot under our controller.
The robot and target trajectories ( and in equation (22) are 0.01 and −0.01, respectively).
Left figure: unobservable state with respect to time index. Right figure: distance between a follower and its closest robot with respect to time index ( and in equation (22) are 0.01 and −0.01, respectively).
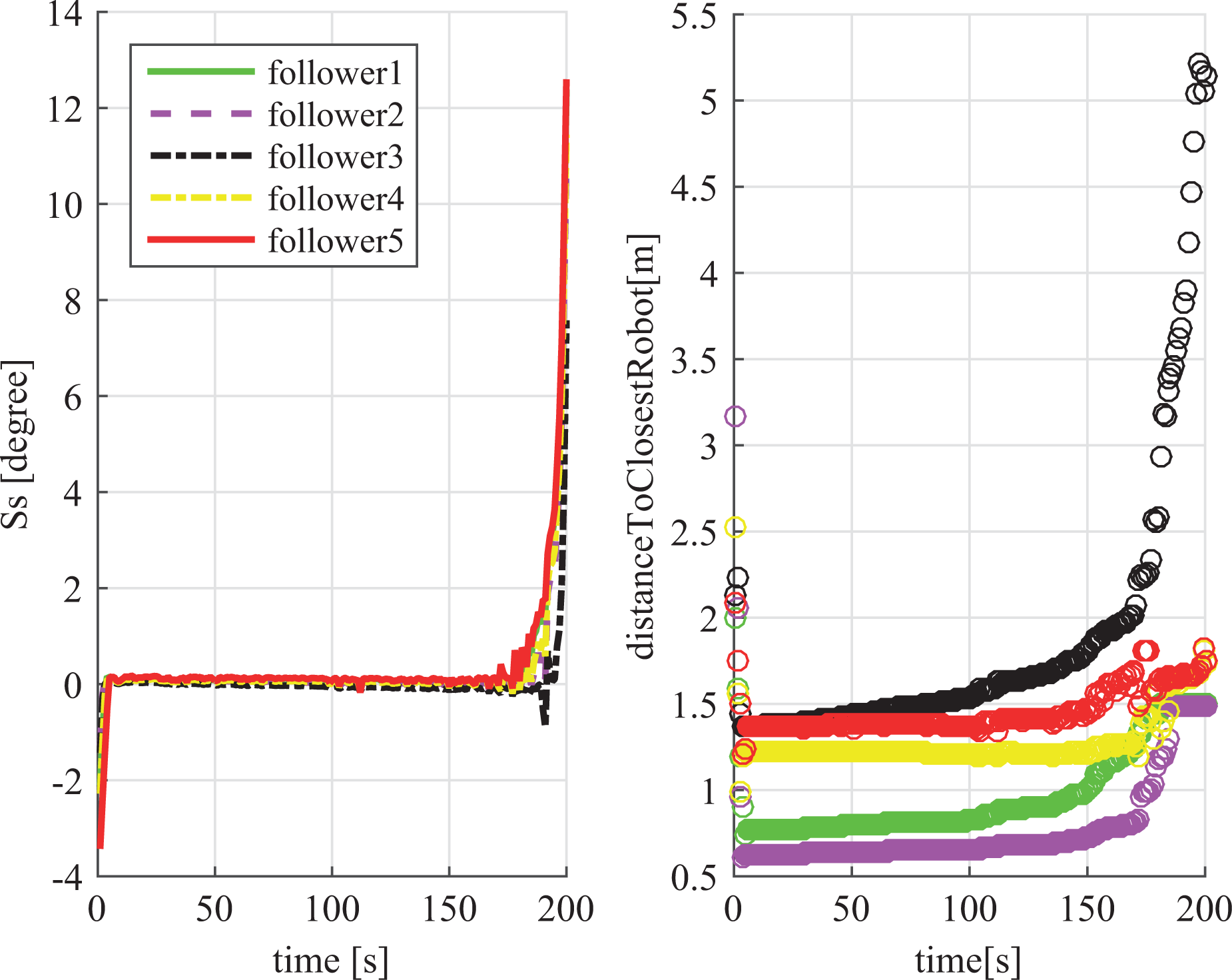
Figure 9 shows the system behavior when and in equation (22) are and −0.01, respectively. Considering the scenario in Figure 9, Figure 10 presents Ss with respect to time index. Ss of each follower becomes positive as time index increases. This indicates that every follower becomes unobservable as time index increases. Also, Figure 10 shows the distance between a follower and its closest robot with respect to time index. See that collision avoidance is assured for each robot under our controller.
The robot and target trajectories ( and in equation (22) are and −0.01, respectively).
Left figure: unobservable state with respect to time index. Right figure: distance between a follower and its closest robot with respect to time index ( and in equation (22) are and −0.01, respectively).
Theorem 4 proved that Fi avoids colliding with Fm for every time index . Here, is a time index satisfying that both and are on . Theorem 4 proved that the relative distance between Fi and Fm does not change for every time index . However, Figures 8 and 10 show that the distance between a follower and its closest robot slowly changes even after a follower is located on L. This is due to the fact that the bearing line of the leader, whose motion is controlled under the 3-D controller in the Reddy et al.’s study,11 rotates slowly.
Noisy simulations
In this subsection, we consider noisy environments. represents sensor noise and is a vector with three elements. Each element in has Gaussian distribution with mean 0 and covariance 0.1
Figure 11 shows how the system behaves when and in equation (22) are 0.01 and −0.01, respectively. Considering the scenario in Figure 11, Figure. 12 presents Ss with respect to time index. Ss of each follower is negative initially, which implies that a follower is detected by the target initially. In general, Ss of each follower becomes positive as time index increases. However, Ss becomes negative occasionally, due to noisy environments. Figure 12 further shows that collision avoidance is assured for each robot under our controller.
The robot and target trajectories in noisy environments ( and in equation (22) are 0.01 and −0.01, respectively).
Simulations in noisy environments. Left figure: unobservable state with respect to time index. Right figure: distance between a follower and its closest robot with respect to time index ( and in equation (22) are 0.01 and −0.01, respectively).
Figure 13 shows the system behavior when and in equation (22) are and −0.01, respectively. Considering the scenario in Figure 13, Figure 14 presents Ss with respect to time index. In general, Ss of each follower becomes positive as time index increases. However, Ss becomes negative occasionally, due to noisy environments. Also, Figure 14 shows that collision avoidance is assured for each robot under our controller.
The robot and target trajectories in noisy environments ( and in equation (22) are and −0.01, respectively).
Simulations in noisy environments. Left figure: unobservable state with respect to time index. Right figure: distance between a follower and its closest robot with respect to time index ( and in equation (22) are and −0.01, respectively).
Conclusions
This article introduces a 3-D multi-agent control which is to make a team of robots get closer to a target while not being observed by the target. Our 3-D chasing controller is to control followers so that they are not observed, blocked by the stealth leader. This article further proves that under our stealth control with some condition satisfied, multiple robots avoid colliding with each other. Simulations are utilized to demonstrate the effectiveness of our 3-D multi-agent controller.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work (Grants No. S2684391) was supported by project for Cooperative RD between Industry, Academy, and Research Institute funded Korea Ministry of SMEs and Startups in 2019.
MirzaeiFMMourikisAIRoumeliotisSI. On the performance of multi-robot target tracking. In: Proceedings 2007 IEEE international conference on robotics and automation, Italy, 10–14 April 2007, pp. 3482–3489. IEEE.
3.
CyrilRLacroixS. Multi-robot target detection and tracking: taxonomy and survey. Auton Robot2016; 40(4): 729–760.
4.
JohnSTaylorC. Dynamic sensor planning and control for optimally tracking targets. Int J Robot Res2003; 22(1): 7–20.
5.
HausmanKMullerJHariharanA. Cooperative multi-robot control for target tracking with onboard sensing. Int J Robot Res2015; 34(13): 1660–1677.
6.
ZhouKRoumeliotisSI. Multirobot active target tracking with combinations of relative observations. IEEE Trans Robot2011; 27(4): 678–695.
7.
GhoseKHoriuchiTKKrishnaparasadPS. Ecolocating bats use a nearly time-optimal strategy to intercept prey. PLos Biol2006; 4(e108): 865–873.
8.
MizutaniAKChahlJSSrinivasanMV. Insect behaviour: motion camouflage in dragonflies. Nature2003; 423: 604.
9.
AndersonAJMcOwanPW. Model of a predatory stealth behaviour camouflaging motion. Proc Roy Soc B2003; 270: 489–495.
10.
JusthEWKrishnaprasadPS. Steering laws for motion camouflage. Proc R Soc A2006; 462: 3629–3643.
11.
ReddyPVJusthEWKrishnaprasadPS. Motion camouflage in three dimensions. In: Proceedings of IEEE Conference on Decision and Control, USA, 13–15 December 2006, pp. 3327–3332. Piscataway: IEEE.
12.
KimJ. Cooperative exploration and networking while preserving collision avoidance. IEEE Trans Cybernetics2017; 47(12): 4038–4048.
13.
AndoHOasaYSuzukiI. Distributed memoryless point convergence algorithm for mobile robots with limited visibility. IEEE Trans Robot Autom1999; 15: 818–828.
14.
FlocchiniaPPrencipebGSantorocN. Gathering of asynchronous robots with limited visibility. Theor Comput Sci2005; 337: 147–168.
15.
JiMEgerstedtM. Distributed coordination control of multi-agent systems while preserving connectedness. IEEE T Robotic2007; 23(4): 693–703.
16.
GervasiVPrencipeG. Coordination without communication: the case of flocking problem. Discret Appl Math2004; 144: 324–344.
17.
ZhangFFratantoniDMPaleyD. Control of coordinated patterns for ocean sampling. Int J Control2007; 80: 1186–1199.
18.
ZhangFLeonardNE. Cooperative control and filtering for cooperative exploration. IEEE Trans Autom Control2010; 55(3): 650–663.
19.
CaoYYuWRenW. An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans Ind Inform2012; 9: 427–438.
20.
KimJ. Capturing intruders based on Voronoi diagrams assisted by information networks. Int J Adv Robot Sys2017; 14(1): 1–8.
21.
KimJ. Cooperative exploration and protection of a workspace assisted by information networks. Ann Math Artif Intell2014; 70: 203–220.
22.
KimJMaxonSEgerstedtM. Intruder capturing game on a topological map assisted by information networks. In: Proceedings of IEEE Conference on Decision and Control, Orlando, USA, 12–15 December 2011, pp. 6266–6271.
23.
KimJZhangFEgerstedtM. Simultaneous cooperative exploration and networking based on Voronoi diagrams. In: Proceedings of IFAC Workshop on Networked Robotics, Colorado, USA, 6–8 October 2009, pp. 1–6.
24.
JiMMuhammadAEgerstedtM. Leader-based multi-agent coordination: controllability and optimal control. In: American control conference, USA, 14–16 June 2006, pp. 1358–1363. Piscataway: IEEE.
25.
ParkerLEKannanBFuX. Heterogeneous mobile sensor net deployment using robot herding and line-of-sight formations. In: Proceedings. 2003 IEEE/RSJ international conference on intelligent robots and systems, 2003 (IROS 2003), vol. 3, USA, 27–31 October 2003, pp. 2488–2493. Piscataway: IEEE.
26.
GuptaMDasJVieiraMAM. Collective transport of robots: coherent, minimalist multi-robot leader-following. In: 2009 IEEE/RSJ international conference on intelligent robots and systems, USA, 10–15 October 2009, pp. 5834–5840. IEEE.
27.
LekkasAMFossenTI. Integral LOS path following for curved paths based on a monotone cubic Hermite spline parametrization. IEEE Trans Contr Syst Technol2014; 22: 2287–2301.
28.
BreivikM. Topics in guided motion control of marine vehicles. PhD Dissertation, Department of Engineering Cybernetics, Norwegian University Science and Technology, 2010.
29.
OhSSunJ. Path following of underactuated marine surface vessels using line-of-sight based model predictive control. Ocean Eng2010; 37: 289–295.
30.
SniderJM.Automatic steering methods for autonomous automobile path tracking. Pittsburgh: CMU-RI-TR-09-08, Robotics Institute Carnegie Mellon University, 2009.
31.
CarmoMD. Differential geometry of curves and surfaces. Upper Saddle River: Prentice Hall, 1976.