
Abstract
Parametric interpolation for spline plays an increasingly important role in modern manufacturing. It is critical to develop a fast parametric interpolator with high accuracy. To improve the computational efficiency while guaranteeing low and controllable feedrate fluctuation, a novel parametric interpolation method based on prediction and iterative compensation is proposed in this article. First, the feedrate fluctuation and Taylor’s expansion are analyzed that there are two main reasons to reduce the calculation accuracy including the truncation errors caused by neglecting the high-order terms and discrepancy errors between the original curve and the actual tool path. Then, to reduce these errors, a novel parametric interpolation method is proposed with two main stages, namely, prediction and iterative compensation. In the first stage, a quintic polynomial prediction algorithm is designed based on the historical interpolation knowledge to estimate the target length used in the second-order Taylor’s expansion, which can improve the calculation accuracy and the convergence rate of iterative process. In the second stage, an iterative compensation algorithm based on the second-order Taylor’s expansion and feedrate fluctuation is designed to approach the target point. Therefore, the calculation accuracy is controllable and can satisfy the specified value through several iterations. When finishing the interpolation of current period, the historical knowledge is updated to prepare for the following interpolation. Finally, a series of simulations are conducted to evaluate the good performance in accuracy and efficiency of the proposed method.
Keywords
Introduction
Parametric interpolation for spline plays an increasingly important role in modern manufacturing including computer numerical control machining and robots. 1,2 Compared with the traditional linear and circular interpolation, parametric interpolation has a lot of advantages in surface quality, execution efficiency, memory consumption, and motion smoothness and is especially suitable for the high-speed and high-accuracy occasions. 3,4 Therefore, it is critical to develop a reasonable parametric interpolator to realize fast and accurate calculation.
There are two main steps to conduct the parametric interpolation. The first and the key step is to determine the parameter
The first- and second-order Taylor’s expansion (STE) are the widely used approximate methods with low computational load 5 –9 and can satisfy the accuracy requirement of general situations. However, the high-order terms are neglected to improve the real-time performance, which causes the truncation errors. Hence, the calculation accuracy is limited and not suitable for the higher requirement. To improve the accuracy, the remapping interpolation methods (RIMs) are developed. The main idea of RIM is to establish the inverse length function (ILF) between the arc length and parameter. The polynomial functions with different orders are widely used to construct ILF. Liu et al. 10 and Lei et al. 11 used the cubic polynomial function for interpolation. To further improve the calculation accuracy, quintic polynomial function was employed in the study by Erkorkmaz and Altintas 12 and Jeong. 13 Moreover, Heng and Erkorkmaz, 14 Yang et al., 15 and Yang and Altintas 16 adopted the seventh- and ninth-order polynomials to avoid wiggle. With the ILF of each curve segment, the computational load is lower. However, a large amount of polynomial functions are constructed, which needs considerably large memory to store the coefficients. Meanwhile, both the Taylor’s expansion and the RIM cannot control the calculation accuracy to reach the specified value.
To cope with these problems, some feedback interpolation methods, which employed the feedrate feedback schemes to compensate for the feedrate fluctuation in an iterative manner, have been developed. Cheng et al., 17 Cheng and Tsai, 18 and Cheng et al. 19 proposed the real-time predictor–corrector interpolator with two stages, which reduces the feedrate fluctuation significantly. The predictor stage is to estimate the initial parameter. Then, in the corrector stage, the parameter can be approached through iteration until the feedrate fluctuation satisfies the specified value. To reduce the iteration number, Zhao et al. 20 developed the chord-tracking algorithm (CTA). Similarly, CTA has two stages. In the first stage, the arc-length compensation scheme is proposed according to the curvature of the curve, and the STE is employed to predict the parameter. In the second stage, the Newton–Raphson algorithm is used for the iterative correction.
To further improve the computational efficiency while guaranteeing controllable accuracy, a novel parametric interpolation method based on prediction and iterative compensation (PIC) is proposed in this article. First, the feedrate fluctuation and Taylor’s expansion are analyzed that there are two main reasons to reduce the calculation accuracy including the truncation errors caused by neglecting the high-order terms and discrepancy errors between the original curve and the actual tool path. Then, to reduce these errors, a novel parametric interpolation method is proposed with two main stages, namely, PIC. In the first stage, the target length used in the STE is estimated by the proposed prediction algorithm where a quintic polynomial prediction model is established based on the historical interpolation knowledge. The modeling and prediction processes have low computational load because the coefficient matrix in parameter identification is constant. After that, in the second stage, an iterative compensation algorithm based on the STE and feedrate fluctuation is designed to approach the target point. Therefore, the convergence rate can be increased by the length prediction. Meanwhile, the calculation accuracy is controllable and can satisfy the specified value through several iterations. When finishing the interpolation of current period, the historical knowledge is updated to prepare for the following interpolation.
The remainder of this article is organized as follows. In the second section, the analysis of the feedrate fluctuation and Taylor’s expansion is illustrated. The third section describes the proposed parametric interpolation method including PIC. Simulation results are analyzed and compared with previous works in the fourth section. The conclusions are given in the fifth section.
Analysis of feedrate fluctuation and Taylor’s expansion
The typical procedures of spline interpolation are given in the study by Xinhua et al., 21 which can be described briefly as follows. In the ith interpolation period, the feedrate scheduling module is implemented firstly to obtain the desired step size Li . Then, the parametric interpolation module is performed to calculate the position of the target interpolation point. Finally, the motion controller conducts the real-time servo control and drives the motion axes to track the target trajectory. Therefore, the actual tool path in each interpolation period is a small line segment. When conducting the parametric interpolation, there is no relation between the arc length and parameter of the spline, which makes it difficult to realize a fast and accurate interpolation. As shown in Figure 1, where A, B, and C are the start, target, and actual points in the ith interpolation period, the feedrate fluctuation ε is inevitable with the approximate calculation, which can be expressed as follows


where


Feedrate fluctuation in parametric interpolation.
Among the various interpolation methods, the Taylor’s expansion is widely used especially in the first- and second-order expansion for their low computational load, which can be expressed by equations (4) and (5), 22 respectively


where Truncation errors: The use of Taylor’s expansion can be seen as reconstructing a curve Discrepancy errors: Corresponding to the arc-length
In most literatures, Li
is used directly to replace

Analysis of the interpolation accuracy by Taylor’s expansion.
Parametric interpolation method based on PIC
In this section, the proposed parametric interpolation method is described. The prediction algorithm is given in “Quintic prediction algorithm according to historical knowledge” section where a quintic prediction model is established according to the historical knowledge. “Iterative compensation algorithm based on the STE and feedrate fluctuation” section illustrates the iterative compensation algorithm. Finally, the proposed PIC algorithms are combined to construct the parametric interpolation method in “Parametric interpolation method” section.
Quintic prediction algorithm according to historical knowledge
As described in the second section, it is effective to improve the interpolation accuracy by predicting the length
As can be seen from Figure 3, for a definite parametric curve interpolated by Taylor’s expansion with definite order, the curvature and feedrate profiles change gently between the adjacent interpolation periods. Therefore,

Historical knowledge of the interpolation process.
The polynomial functions with different degrees are good at modeling the unknown system and performing the prediction. Hence, the quintic polynomial function is employed to build the prediction model and to predict

where a 0∼a 5 are the unknown parameters and can be identified as follows

When predicting

where
It should be noted that although equation (6) is a quintic model, the coefficient matrix Φ is constant and its inverse matrix can be obtained in advance. Hence, the parameter identification process given in equation (7) has low computational load. In addition, for the situations that there is no enough historical knowledge such as the beginning part of interpolation process, lower polynomial prediction models can be established similar to equation (6). In particular, the prediction ratio is set to 1 in the first calculation.
Iterative compensation algorithm based on the STE and feedrate fluctuation
The calculation accuracy can be improved by the prediction algorithm given in “Quintic prediction algorithm according to historical knowledge” section. However, the feedrate fluctuation is still uncontrollable and cannot be guaranteed to reach the specified value. Therefore, an iterative compensation algorithm is proposed to cooperate with the prediction algorithm and further reduce the feedrate fluctuation.
Since the computational load of the STE is little larger than the first-order, the second-order method is employed with the feedrate fluctuation to construct the iterative compensation algorithm. Figure 4 illustrates the iterative calculation process in one interpolation period, where E is the start point,F is the desired target point, and Fj is the actual point obtained by the jth iteration. Based on Figure 4, the procedures of the proposed iterative compensation method are described as follows and its flowchart is shown in Figure 5.

The iterative compensation algorithm.

The flowchart of the proposed iterative compensation algorithm.
(1) Step 1: initialing iterative parameters After the feedrate scheduling, the iterative parameters need to be initialed firstly to (2) Step 2: calculating the target point by the STE and Lj
. The parameter uj
of target point can be calculated based on Lj
and the STE given in equation (5). Then, Fj
can be obtained according to uj
. Hence, the actual length (3) Step 3: calculating the feedrate fluctuation
Based on Lj
, If If
(4) Step 4: updating j and recalculating the step size Lj
based on εj
j should be updated by

Then, back to step 2.
Through several iterations, the feedrate fluctuation can be reduced to reach the specified value.
Parametric interpolation method
By combining the PIC algorithms, the whole parametric interpolation method can be described as follows and its flowchart is shown in Figure 6. In one interpolation period, there are two main modules.

The flowchart of the parametric interpolation with prediction and iterative compensation.
Prediction module: Before the interpolation calculation, the quintic polynomial prediction model is established according to the historical knowledge. Then, the ratio Iterative compensation module: Based on
Simulation validation
In this section, analytical simulations of two nonuniform rational B-spline (NURBS) curves are conducted to evaluate the good performance of the proposed interpolation method with PIC. Analysis and comparisons are also performed with three representative methods including the STE, CTA, and RIM.
Test cases and simulation environment
NURBS is one of the most widely used parametric curve as it offers a common mathematical form for the precise presentation of standard analytical shapes. 23 Therefore, two NURBS curves which are the butterfly-shaped curve and ∞-shaped curve, which are shown in Figure 7 with their curvature curves, are selected as the cases studies. The degree, control points, knot vector, and weight vector of the test curves are given in the study by Ni et al. 24 The feedrate scheduling method given in the study by Ni et al. 25 is used in this article with the interpolation parameters illustrated in Table 1.
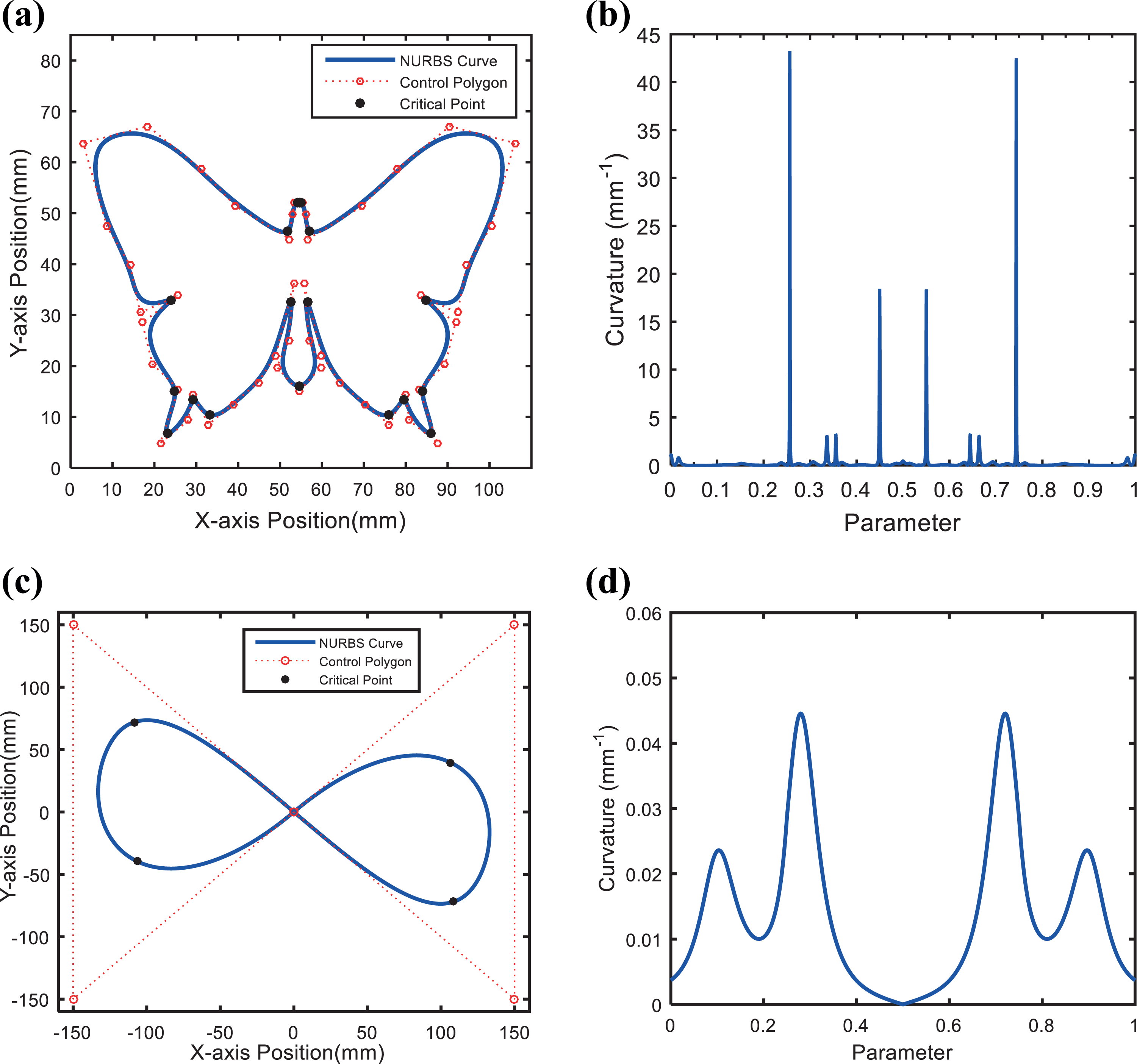
Test curves and their curvature curves. (a) Butterfly-shaped curve, (b) curvature of butterfly-shaped curve, (c) ∞-shaped curve, and (d) curvature of ∞-shaped curve.
The simulations are conducted on a personal computer with Intel(R) Core(TM) i5-4460 3.20-GHz CPU, 4.00-GB SDRAM, and Windows 7 operating system. And all the algorithms for the simulations are developed and implemented on Microsoft visual studio 2008 by C++ language.
Simulation results and comparisons
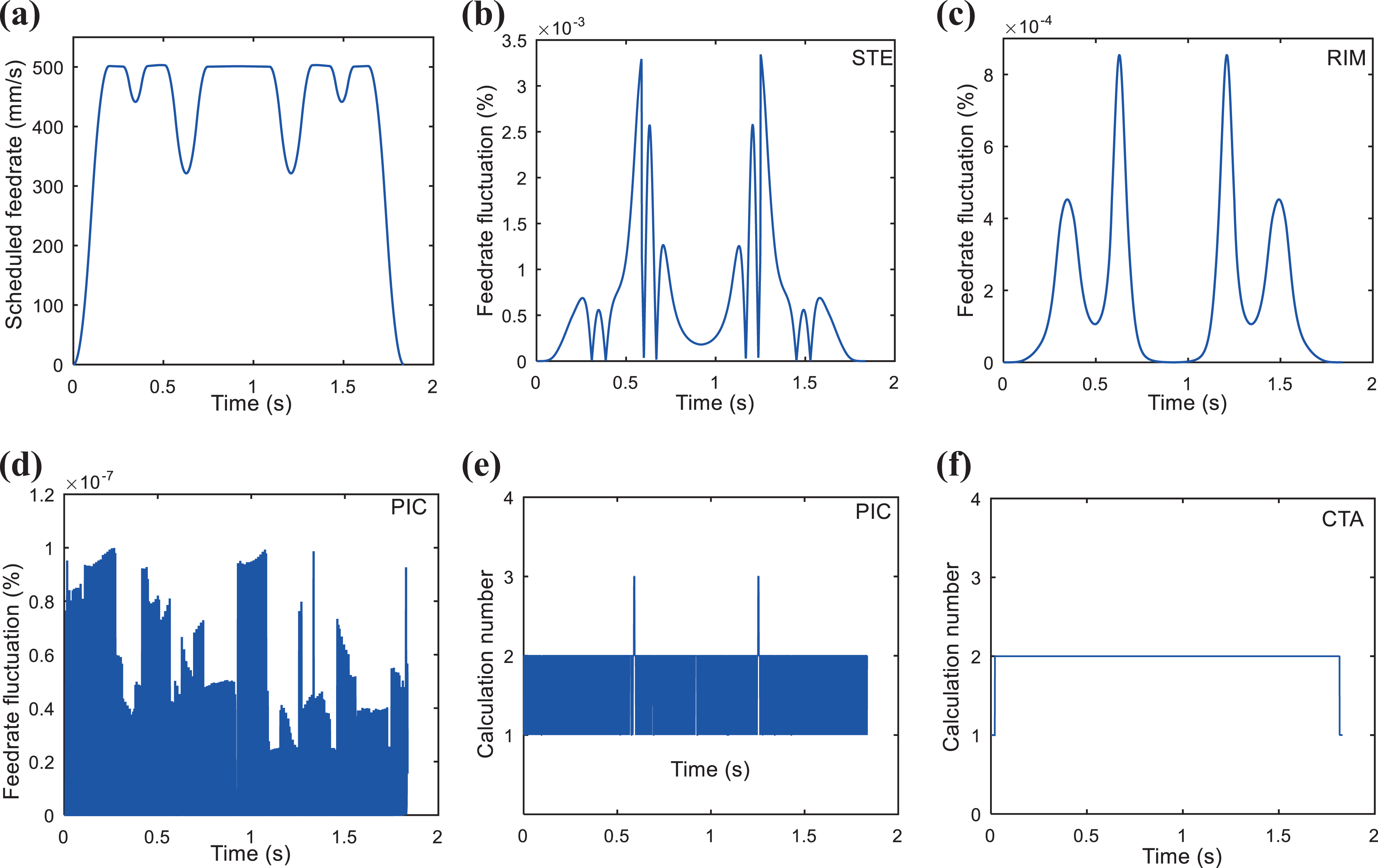
The simulation results of the two NURBS curves are shown in Figures 8(a) to (f) and 9(a) to (f), respectively. As can be seen from Figures 8(b) and (c) and 9(b) and (c), the RIM method has lower feedrate fluctuation than the STE. Meanwhile, the accuracy of these two methods for the ∞-shaped curve is higher than the butterfly-shaped curve owing to the small curvature. However, both of them can only satisfy the low requirement of feedrate fluctuation. In addition, the accuracy cannot be controlled to reach the specified value. Therefore, these methods are only suitable for the parametric curves with small curvatures and low accuracy requirement.

Simulation results of the butterfly-shaped curve. (a) Scheduled feedrate, (b) feedrate fluctuation by STE, (c) feedrate fluctuation by RIM, (d) feedrate fluctuation by the proposed PIC method, (e) calculation number in one interpolation period by the PIC method, and (f) calculation number in one interpolation period by CTA. STE: second-order Taylor’s expansion; RIM: remapping interpolation method; PIC: prediction and iterative compensation; CTA: chord-tracking algorithm.
Simulation results of the ∞-shaped curve. (a) Scheduled feedrate, (b) feedrate fluctuation by STE, (c) feedrate fluctuation by RIM, (d) feedrate fluctuation by the proposed PIC method, (e) calculation number in one interpolation period by the PIC method, and (f) calculation number in one interpolation period by CTA. STE: second-order Taylor’s expansion; RIM: remapping interpolation method; PIC: prediction and iterative compensation; CTA: chord-tracking algorithm.
There is no doubt that both the PIC and CTA methods can satisfy the requirements of feedrate fluctuation given in Table 1 through iterative calculation. The calculation numbers in one interpolation period are shown in Figures 8(e) and (f) and 9(e) and (f) and summarized in Table 2. As can be seen, for both the butterfly-shaped and ∞-shaped curves, the calculation numbers by the PIC method are mainly concentrated for one or two times. For the CTA method, the calculation numbers are concentrated for two or three times of butterfly-shaped curve and two times of ∞-shaped curve. The average computational time during each interpolation period is also tested and illustrated in Table 2. As can be seen, the computational time of the butterfly-shaped curve obtained by the PIC method is 3.007 µs which is 24.66% smaller than 3.991 µs obtained by the CTA method. Similarly, for the ∞-shaped curve, PIC method with 2.383 µs is 30.20% faster than the CTA method with 3.414 µs. Therefore, the proposed PIC method has higher computational efficiency and can satisfy the real-time requirement of typical applications.
Interpolation parameters.

Static comparisons of the computational efficiency.

PIC: prediction and iterative compensation; CTA: chord-tracking algorithm.
Conclusion
In this article, a novel parametric interpolation method based on PIC is proposed to reduce the computational load while guaranteeing low and controllable feedrate fluctuation. The main conclusions of the study are as follows: The Taylor’s expansion and feedrate fluctuation are analyzed where there are two main errors, namely, truncation and discrepancy. It is concluded that the calculation accuracy can be improved obviously by predicting the length used in Taylor’s expansion. To predict the length used in Taylor’s expansion, a quintic polynomial prediction algorithm is proposed based on the historical interpolation knowledge, which can improve the calculation accuracy and increase the convergence rate of iterative process. An iterative compensation algorithm is designed based on feedrate fluctuation and STE to approaching the target point. By combining the PIC algorithms, the parametric interpolation method is proposed. Therefore, the convergence rate is increased by the length prediction while the accuracy is guaranteed by iteration. A series of simulations are performed with previous works to validate the good performance of the proposed method in accuracy and efficiency.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported by the National Key Research and Development Program of China (Grant No. 2017YFB13041102) and the National Natural Science Foundation of China (Grant No. 51875323).