
Abstract
This article studies the inverse kinematics for asymmetric octahedral variable geometry truss manipulator with obstacle avoidance. The inverse kinematics problem is cast as a nonconvex optimization that having quadratic objective function subject to quadratic constraints. This article uses an inexact interior point optimization to solve it, which is developed on the basis of the imprecise algorithm Ipopt. According to the particularity of our actual optimization problem, each iteration undergoes specific modifications so as to minimize the memory consumption as well as computation time. Utilizing the sparse and binary characteristics of the coefficient matrix, respectively, the algorithm allocates the computation to the finite sparse matrix vector multiplication and changes the storage form, which greatly reduces the memory space. Based on the unique rules of inverse kinematics, the iteration direction of the algorithm becomes more clear. With the aid of mechanical constraints inherent in the manipulator, the algorithm omits the feasibility recovery part that embedded in the solver Ipopt. All these make us save the operation time greatly while utilizing Ipopt algorithm. To demonstrate the effectiveness of the proposed approach, the scheme was applied to obstacle avoidance inverse kinematics of variable geometry truss manipulator with three modules.
Keywords
Introduction
The variable geometry truss manipulator (VGTM) is a type of hyper-redundant robotic mechanism. It is a statically determinate truss-type structure whose length of the actuators can be changed. The robotic arm studied in this article consists of a number of asymmetrical octahedral modules. Each module uses three SANMOTION F2 2-phase stepper motors as the power drive. By adjusting the length of the linear actuator, the robot arm can perform the specified operation. Due to its advantage of low weight and high stiffness, it is anticipated to be applied in the fields of future space station, submarine exploration, and detection. 1
As early as 1980s, the concept of VGT evolved from the adaptive structure concept. 2 Since then, many scholars have devoted themselves to the study of kinematics, 3,4 analysis of dynamics and control, 5 design of conceptual and actual structures of VGTM, 6,7 workspace analysis, 8,9 and so on. Concerning nonsymmetric VGTM, the number of solutions to its inverse kinematics is infinite. In other words, for a preset end effector position, the configuration of VGTM may change with the end effector position remaining constant. Consequently, it is essential to choose an effective selection criteria.
In general, there are three main methods of inverse kinematics for manipulator: the geometric method, 10 the numerical approach, 11,12 and the analytical method. 13,14 Samer Yahya et al. proposed a new geometric approach to solve the inverse kinematics of hyper-redundant manipulators. 10 This method is accurate and fast and can determine all possible solutions. But it needs to decompose the spatial geometric parameters of the manipulator into planar ones. If a closed solution is to be obtained, the manipulator must satisfy a certain geometric structure, and the closed-form solution of this class of the robotic arm cannot be used for other manipulators with different geometries. Therefore, the geometric approach is suitable for solving inverse kinematics of robots with simple joint structure model. For a robotic arm with complex structure, the numerical approach can also obtain one solution from the infinitely multiple inverse solutions of the manipulator through iterative calculation. 11 However, the long computation time makes it unsuitable for online use, meanwhile, the algorithm usually does not have global convergence, and it is prone to singularity. 12 The analytical method has the advantages of accurate calculation results and can find all solutions. However, it requires a large amount of algebra and matrix operations, and the derivation process is complicated. 13 Moreover, analytical solutions are difficult to obtain due to the multiparameters, nonlinearity and coupling of the solution and the complex nonlinear constrained algebraic equations involved in the inverse kinematics of the robot. 14
For the high redundancy of VGTM, many studies have attempted to decompose it, which captured the characteristics of macroscopic geometry of VGTM through the use of “reference spline” or “backbone curve”. Zanganeh and Angeles 15 put forward a solution method based on spline. For a prescribed optimization criterion, redundancy can be resolved by looking for the optimum shape of the skeleton curve. However, this approach requires a priori assumption that, along any one of the candidate curves, there exists a fixed coordinate system distribution of intermediate platforms. Chirikjian and Burdick 16,17 proposed two approaches to determining an optimal configuration of VGTM. In the first proposed method of modal hyper-redundancy resolution, the shape function of the backbone curve was restrained to only one set of modes. After that, they put forward the other method on basis of a continuum model for kinematics. Since this method did not provide a direct way of satisfying the constraints associated with the pose of the end effector, the modes needed to be selected carefully. In addition, the complex nature of this approach makes it rather costly to solve the inverse kinematics in real time for hyper-redundant manipulators in three-dimensional space. Fahimi et al. 18 extended the modal approach. By changing the original mode using a new form of function, they applied the expanded method to solve the inverse kinematics of spatial hyper-redundant manipulators. However, this method is only applicable to the case that the hyper-redundant mechanical arm is a serial chain.
In recent years, on the other hand, the research on VGTM mainly focused on two major types of structural forms. One type is manipulators driven by binary actuating mechanisms with two steady states, 19,20 and the other type is those whose actuators are continuous but not installed on moving platforms. 21 –23 For the first type of VGTM, Bayram and Ozgoren 19,20 studied the concept design together with the direct kinematics along with position control, respectively, through the use of inverse kinematics of a binary hyper-redundant mechanical arm in space. For VGTMs with the second structure, Iwatsuki et al. 21 analyzed the kinematics of a hyper-redundant mechanical arm and proposed a motion control method for it. Mintenbeck and Estanna 22 investigated the configuration design, physical modeling and motion control of a hyper-constrained 3-revolute prismatic spherical (RPS) parallel robot. Chibani et al. 23 presented a deterministic optimizing process to generate optimal reference kinematic configurations for a spatial hyper-redundant parallel robot with multiple rigid modules. Aviles et al. 24 described two procedures to identify the optimum damper locations in VGTMs, and then they developed a novel method of analyzing the inverse dynamics of a VGTM containing elastic elements. 25 Rost et al. 26 presented the joint design and hydraulic drives for a VGTM consisting of three-degree-of-freedom octahedral modules.
However, for the VGTM constituted by asymmetric octahedral modules that to be studied, it is almost impossible to create a fixed coordinate system for each module because its actuators are mounted on a mobile platform. Therefore, it is extremely difficult to formulate the forward kinematics with explicit equations, which makes the methods used in the above two structures not applicable for nonsymmetric octahedral VGTMs.
In the nearly 30 years since the interior point algorithm has been invented, it has become the kernel of many existing nonlinear optimization solvers. 27 Due to its superlinear convergence as well as possible combination with inexact Newton’s method and powerful linear solver, the algorithm can even solve general nonconvex nonlinear optimization problems in an ideal time. 28 In addition, because the dominant computing cost in the interior point algorithm is to solve the linear equation, 29 its parallel computation and compression algorithms also play a significant role in quickly solving practical problems. However, few articles focus on applying the interior point method to inverse kinematics optimization. Based on the framework of the interior point algorithm, Vigerske Stefan and Andreas Wächter developed Ipopt as a solver for solving large-scale sparse problems. 30 Before solving the optimization problem through the Ipopt solver, it is necessary to provide the solver sparseness to speed up the computing speed. While a large number of large-scale sparse matrices exist in the optimized model established in this article, which is just right for solving our actual problems.
In this article, on basis of the inherent constraints existing in the VGTM structure, first, the inverse kinematics optimization model is established as a general nonconvex quadratic constrained quadratic programming (QCQP) problem. And then, according to the unique characteristics of our actual optimization model, the Ipopt algorithm is adjusted correspondingly to solve this specific optimization model. The sparsity and binarity of the coefficient matrix in our actual optimization model greatly reduce the storage space of the algorithm. The fact that the inverse kinematics follows certain observable rules makes the iteration direction clearer. The fixed mechanical structure constraints existing in VGTM can make the algorithm omit the feasibility recovery part. All of these have saved us a great amount of computation time in the solving process. To demonstrate the effectiveness of the presented approach, the adjusted algorithm was applied to obstacle avoidance inverse kinematics of an asymmetrical octahedral VGTM with three modules.
The remainder of this article is arranged as follows: “Configuration of VGTM” section introduces the kinematic constraints that exist in VGTM. In “Inverse kinematics” section, firstly, the inverse kinematics optimization of VGTM with n modules is formulized as a generalized nonconvex QCQP problem. And then based on inexact interior point optimization, the inverse kinematics optimization gets solved. After that, the numerical simulation results are provided in “Numerical simulations for inverse kinematics” Section. Finally, the conclusions are given in “Conclusion” section.
Configuration of VGTM
This section presents the kinematics restriction exists in an asymmetric octahedral VGTM based on its specific geometric construction. It will be divided into two parts and introduced separately: geometric construction and kinematical constraints of a single VGTM module.
Geometric construction of a single module
The geometric construction of the i th VGTM module is displayed in Figure 1. There are three independent linear actuators at the bottom and top of the octahedral module respectively. As long as the length of any actuator is changed, the platform on top of the module will move relative to that at the bottom. Let
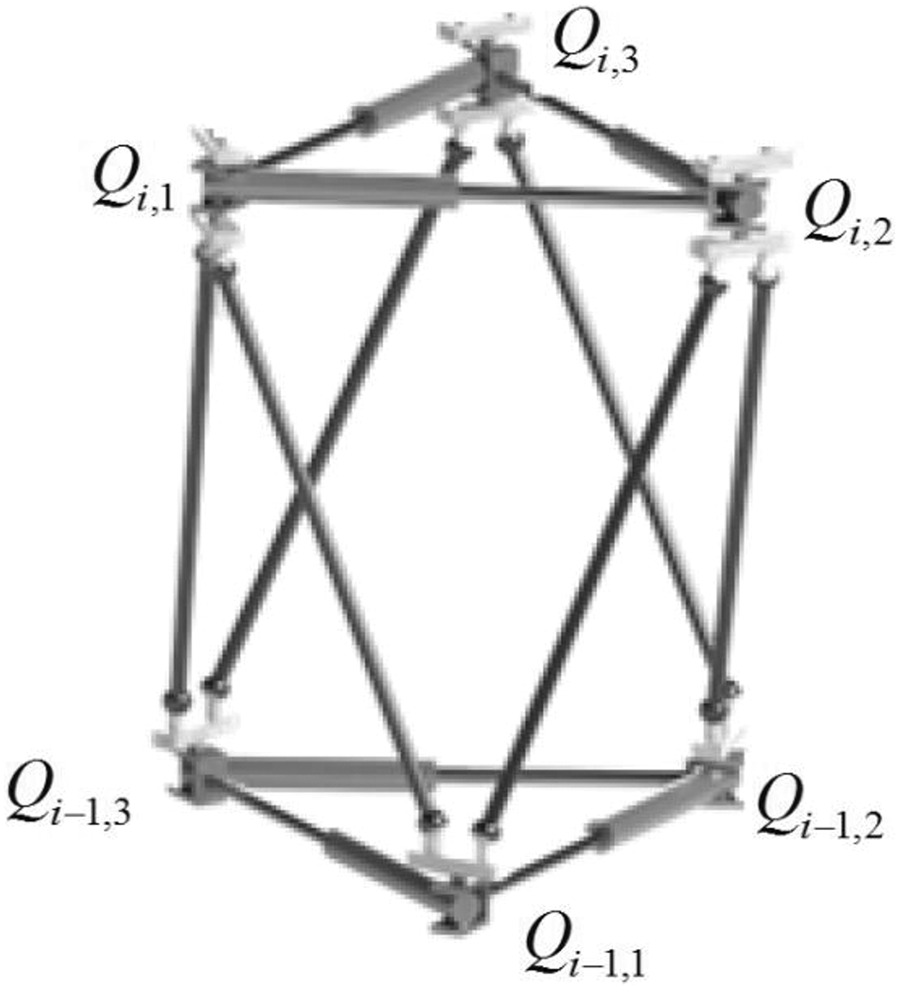
Geometric construction of the i th VGTM module. VGTM: variable geometry truss manipulator.
Kinematical constraints in a single VGTM module
Assume that the length of fixed rod on the side of VGTM module is
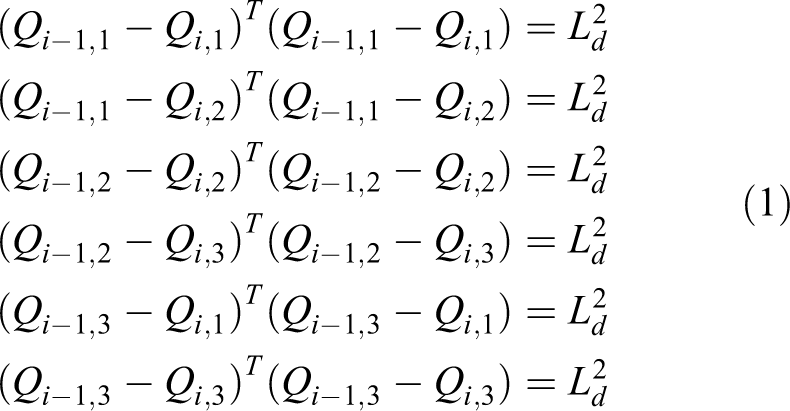
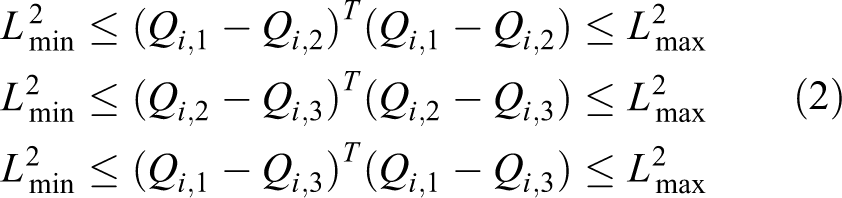
After determining the location of each node in the VGTM module, the position of the top platform center of the i th VGTM module

When the nodes of all VGTM modules were identified, a configuration of VGTM is confirmed. Then the inverse kinematics of VGTM is to locate each node of the VGTM to make sure that the end of the VGTM reached the specified location.
Inverse kinematics
In this section, firstly, the inverse kinematics of VGTM is formulized as a minimization problem and simplified to a QCQP problem in general form. Then, according to the particularity of the VGTM structure, the Ipopt algorithm is adjusted to solve the optimization problem by making the most of the salient features of the optimized model.
Establishment of inverse kinematic optimization model
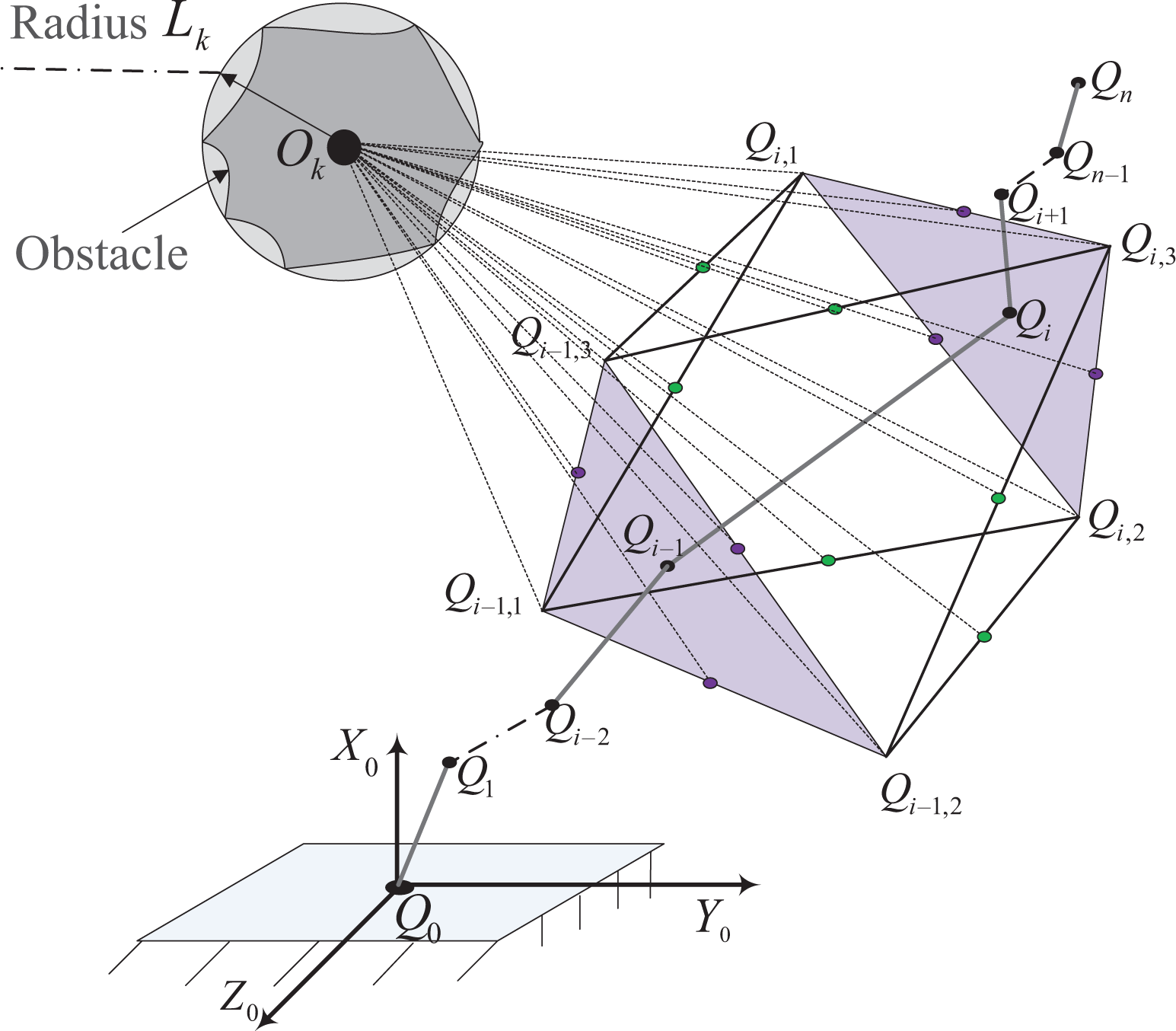
The nonsymmetrical octahedral VGTM studied in this article is shown in Figure 2. Suppose the node positions are represented by The spatial distance between the desired position The structural constraints of VGTM have to be satisfied. The VGTM will not collide with any of the obstacles. And assume that the sphere center and radius of the k th spherical obstacle are

Universal structure of the VGTM. VGTM: variable geometry truss manipulator.
Then the inverse kinematics problem can be described as the following nonconvex quadratic programming problem with quadratic constraints

where
Details for obstacle avoidance.
On the basis of the physical implication of every parameter in the above model, next, the simplification of the optimization model (4) will be detailed.
Suppose the optimized variable
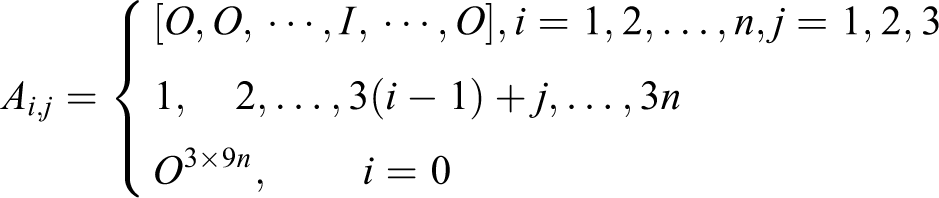
where O and I are zero matrix and unit matrix of 3 order, respectively. Then formulas
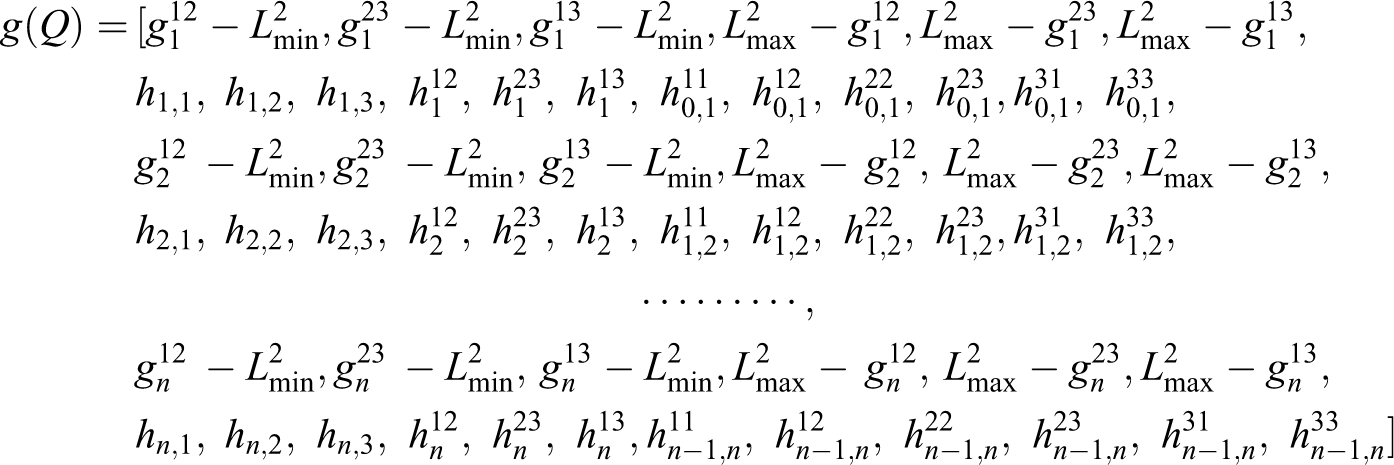
Analogously, the six equality describing fixed rod length in (1), the six inequality constraints representing the actuator length of the VGTM structure in (2), and obstacle avoidance conditions in (4) can also be expressed as quadratic constraints on the optimization variables Q as follows

with

where


here,

with
Consequently, the minimization problem (4) finally becomes

Apparently, both the objective function and the constraints of the above minimization problem are quadratic, that is, it is a general nonconvex QCQP problem.
In order to solve the problem more conveniently in the later chapters, the above specific problem will be simplified to the following nonconvex QCQP optimization with more general form

where the objective function

Solving inverse kinematics via interior point algorithm with inexact step computation
Typically, a generalized nonconvex QCQP problem described as in (6) is NP-hard in general. The existing methods solve nonconvex problems by linearizing their nonconvex parts or relaxing the nonconvexity via semi-definite relaxation. Nevertheless, when the quadratic constraint matrices are indefinite, these approaches are rarely successful in even just acquiring a feasible solution. Nearly 30 years since the interior point algorithm has been invented, it has become a core part of many existing nonlinear optimization algorithms. If its superlinear convergence is combined with powerful linear solver and inaccurate Newton method, this algorithm may even quickly solve a generalized nonconvex nonlinear optimization problem. Next, we will first introduce the uniqueness of the actual problem established in this article. And then, we will describe how to apply the inexact interior point method to solve this problem in detail.
Uniqueness of the optimization problem
The inverse kinematics optimization problem of the VGTM established in this article is an interesting topic and has the following three distinctive features.
The first is sparsity and binarity. As stated previously, as the number of VGTM modules increases, the size of the matrix Q in the target function and the number of constraints in the optimization problem can become extremely large. Despite these matrices appear to be huge, due to sparsity, the valid values stored in the calculation process are actually quite limited. Vigerske Stefan and Andreas Wächter designed a solver Ipopt to solve large-scale sparse problems. 30 As can be seen from the modeling process of the problem, there are many large-scale sparse matrices in the optimization model. While the solver Ipopt needs to be provided with sparsity to speed up the calculation before optimization begins, which is quite suitable for solving our problem. However, another important uniqueness of this practical problem has also drawn our interest in that all matrices Q are not only highly sparse but also contain only two possible valid values of one and minus one besides zero. While the solver Ipopt stores each entry in the matrix as a floating point form, which greatly increases the cost of space even if it is provided the same matrix, because it does not know that all the values to be stored are integers, not to mention binary. Consequently, these sparse matrices are also closely related to binarity, and this property can lead to improvements of the algorithm.
The second is its special way of convergence. In contrast to a pure theoretical problem, the inverse kinematics of the VGTM follows some observable rules, which makes the direction of the iteration clearer. And what is also unique is the way in which the optimization problem converges to the optimal solution, so the following issue is presented. Since the VGTM is a robotic arm and needs to determine the status (such as the length of each actuator) before it performs any operational tasks, the amendment algorithm will not consider the generation of initial points. In addition, the constraint conditions will invariably be within the feasible region that satisfies the initial conditions until it achieves the optimal or converges to the stationary point nearest the optimal one. The desired ideal points are the ones that closest to the local minimum point or the boundary points nearest the initial status. This is because the deformation of the VGTM is limited by its fixed mechanical limitations, and in any case there will never be any actuator beyond its physical limits without destroying the manipulator. Consequently, the feasibility recovery part embedded within the solver Ipopt is needless to our specific problem. And the conditions for implementation can also be adjusted appropriately according to this particular problem. It will also be discussed in the following algorithm section.
Another important uniqueness is that, for VGTM or other general asymmetric VGT types of robots, once its structure is established, the system can be described using an adjacency matrix. And the transformation from the mapping to Hessian matrix and Jacobian matrix is directly available without any manual computations to obtain these important information for the solver. That is to say, even though the system may have variety and asymmetry, as long as its structure is determined, for all VGT-type robots, this procedure can be accomplished automatically. The principle is not hard to understand because it is build on the mechanical coupling between the joints of the VGT structure.
Solving QCQP problem via inexact interior point optimization
In this section, the inaccurate interior point algorithm for the inverse kinematics of the VGTM will be discussed in detail. This algorithm is modified specifically on the basis of the inexact algorithm Ipopt in Curtis et al., 31,32 in particular, the storage cost and CPU or GPU time in each iteration are minimized.
In order to solve the original optimization problem (6), a barrier parameter μ is first introduced, and then the original problem is transformed into the following sub-problem with the barrier parameter decreasing

Here the barrier parameter μ is usually expected to be iteratively reduced. On the basis of the further amendment of the damping process of μ in Gould et al., 33 the update process can require fewer sequences of μ and achieve superlinear convergence speed. In addition, by introducing relaxation variables in (7), inequality constraints can be transformed into equality ones.
Suppose that the Lagrangian multipliers of the equality and inequality constraints are

where the objective function
where
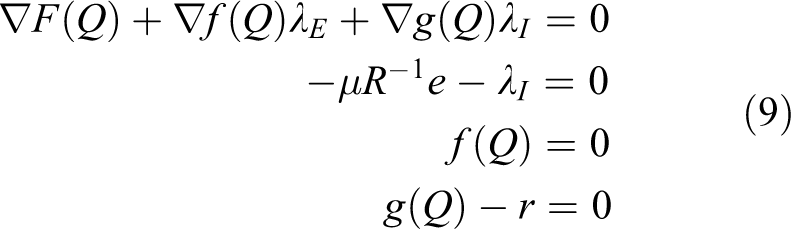
When the first order optimality conditions in formula (9) are not satisfied, that is, the original optimization problem is infeasible, we assume that the optimal solution of the algorithm converges toward the stationary point of the feasible problem as follows

with

The latter equation in formula (11) guarantees that
By differentiating the formula (10), it can be concluded that the point that converges at its first-order optimality can also be characterized as the solution of the following nonlinear equations

When

In order to extend the original and dual iterates Q and r into a single vector, define the following augmented iterates as

respectively, with

So the Lagrange function in formula (8) becomes

Notice that, with a penalty parameter

The corresponding first derivatives of the objective function and constraint are

And the Hessian matrix of the Lagrangian at

where

According to the definition of

In the next step, in order to derive the Newton iteration d for the sequence of barrier subproblems (7) from an iterate

with
As described in Akrotirianakis and Rustem, 34 the equation (17) can be converted to
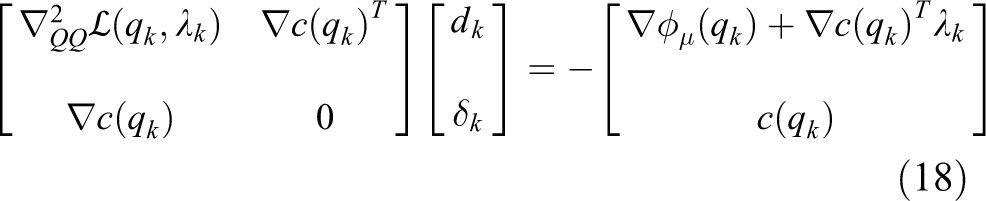
Note: Obtaining the exact solution of equation (18) is computationally costly. Consequently, our objective is to solve the equation (18) by using an iterative linear system solver, under the condition that the imprecise solution is permitted and the global convergence of the algorithm is ensured. For this, we define the dual and constrained residual vector corresponding to the first and second equations in equation (18), respectively, as

If (18) is accurately solved, then

then in order to promote rapid convergence, this residual must be small. Hence, our algorithm aims at calculating the step that the relative residual is lower than the expected threshold. However, we will remove this constraint and select a potentially less precise solution that satisfies our other terminating conditions, on condition that the iterated linear system solver cannot reach this precision after a specified number of iterations. Furthermore, only when
In order to handle the probable rank deficiency appropriately, the linear equation is replaced by an optimization problem. This not only avoids the factorization process but also makes it possible to calculate the inexact step, which still applies to nonconvex programming. Therefore, replacing dk with the sum of a normal step vk and a tangential step uk gives the following formula

Here vk is a move toward satisfying the linear model of constraints that within a trust region and is determined by solving the following optimization problem

Here

Solving the linear equation above takes up most of the memory costs and CPU time. And the performance of optimization algorithm depends, to a great extent, on the selected linear solver. In general, there are two methods for solving linear equations, one is a direct approach based on Cholesky factorization, and the other is an indirect and iterative approach based on the conjugate gradient (CG) method. Because the cost of memory is a major problem encountered in implementation, we are particularly interested in implementing a most advanced iteration solver, which aims to make the total memory cost minimized while maintaining the scalability of parallelization. Compared to the original technique presented in Curtis et al., 32 such an implementation is expected to reduce memory usage significantly. Exploring begins by first converting it to a QP issue through the extension and insertion of (19).


Integrating formula (21) with respect to variable uk, according to equation (22), then the primal linear system of equations can be converted into a QP problem about u as follows

In general, on account that any inertia information of the primal-dual matrix cannot be obtained from the iterative linear system solver used in the disturbed Newton system (20), we may not assure that

Next, the preconditioned CG approach that suitable for sparse and large-scale problems is adopted to deal with the above problem (24), which is mainly because CG is proved to be the optimal choice when the variable size exceeds
After getting the decent search direction, the maximum step length

Where

Here

where

In conclusion, a flowchart of the proposed inverse kinematics optimization algorithm for VGTM can be described as:
Numerical simulations for inverse kinematics
In this part, the results of proposed inverse kinematics optimization for VGTM composed of three modules are presented. We simulate a VGTM with three modules using a personal computer that equipped with Windows 10, a CPU of i7-4790k and a memory of 16 GB DDR3. The parameters of the VGTM are given. For a VGTM with 3 modules, it has 18 lateral passive rods and 9 actuators. The length of each passive member is
Preset parameters of VGTM for simulation.

VGTM: variable geometry truss manipulator.
Assuming that T sampling points and n VGTM modules are taken for simulation, then the absolute error can be worked out based on the formula below

In the light of the conclusion obtained in “Solving inverse kinematics via interior point algorithm with inexact step computation” section, it is assumed that the centre and radius of the spherical obstacle are
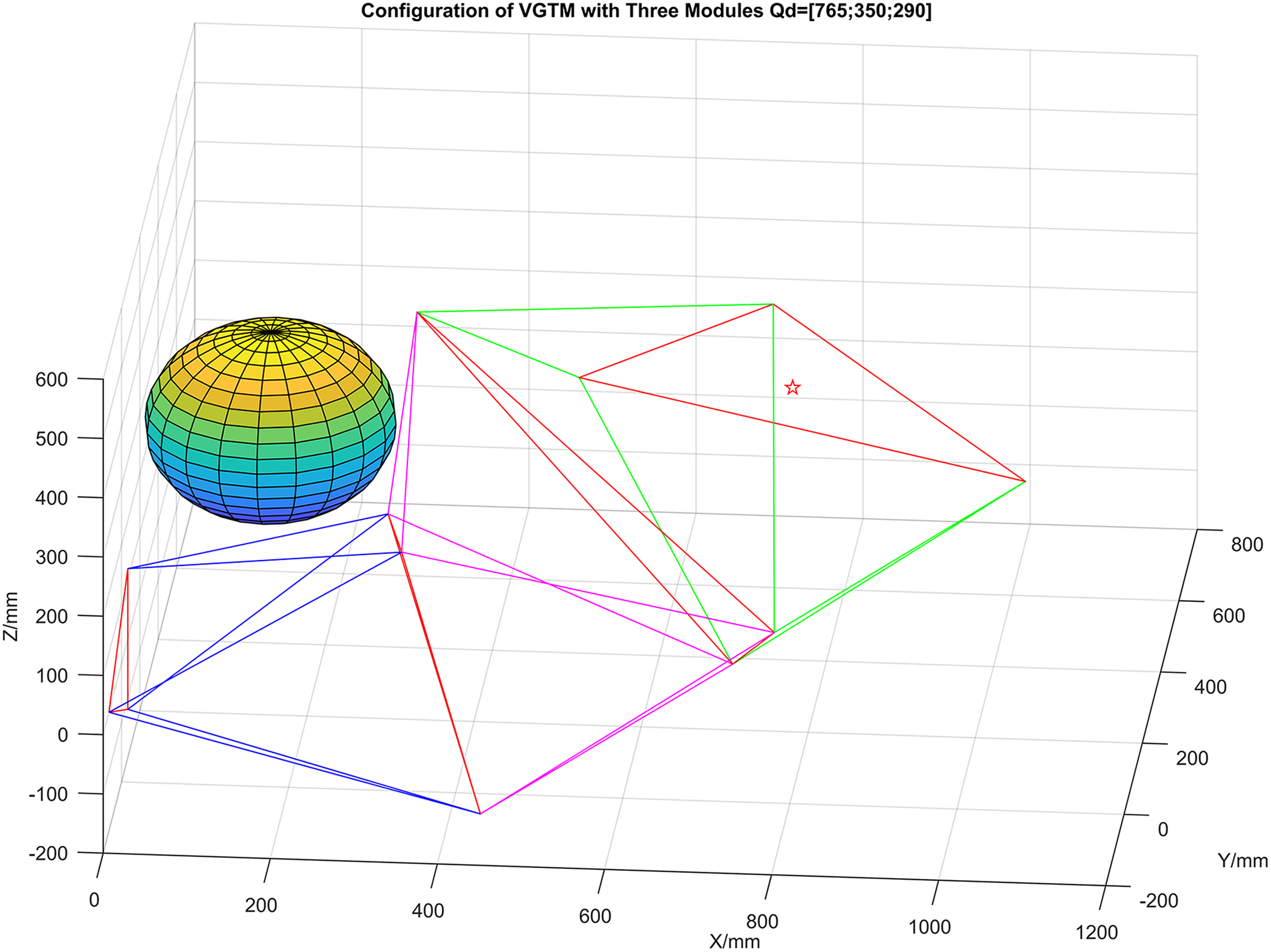
Configuration of asymmetrical octahedral VGTM for obstacle avoidance with Qd=[765;350;290]. VGTM: variable geometry truss manipulator.
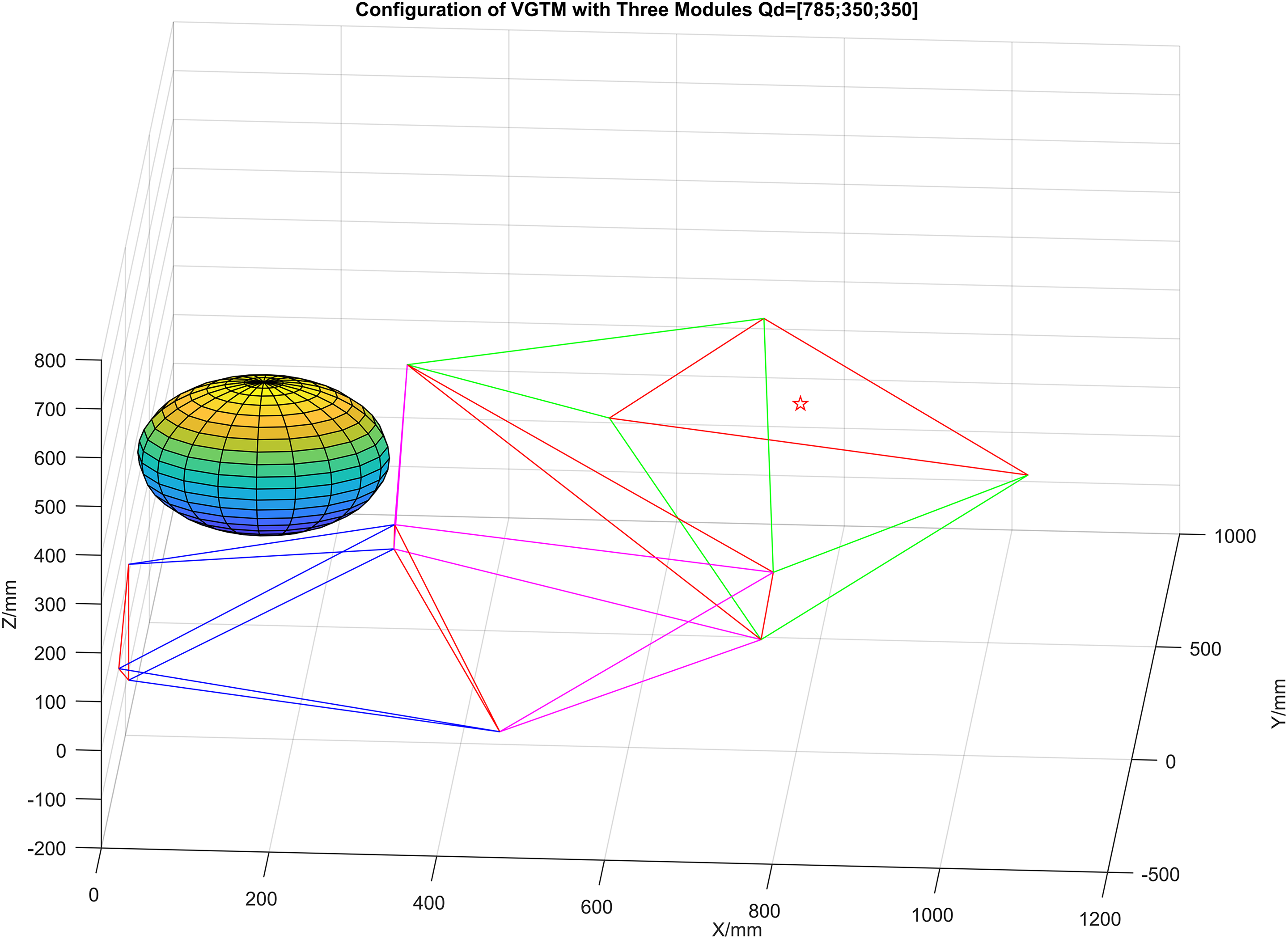
Configuration of asymmetrical octahedral VGTM for obstacle avoidance with Qd=[785;350;350]. VGTM: variable geometry truss manipulator.
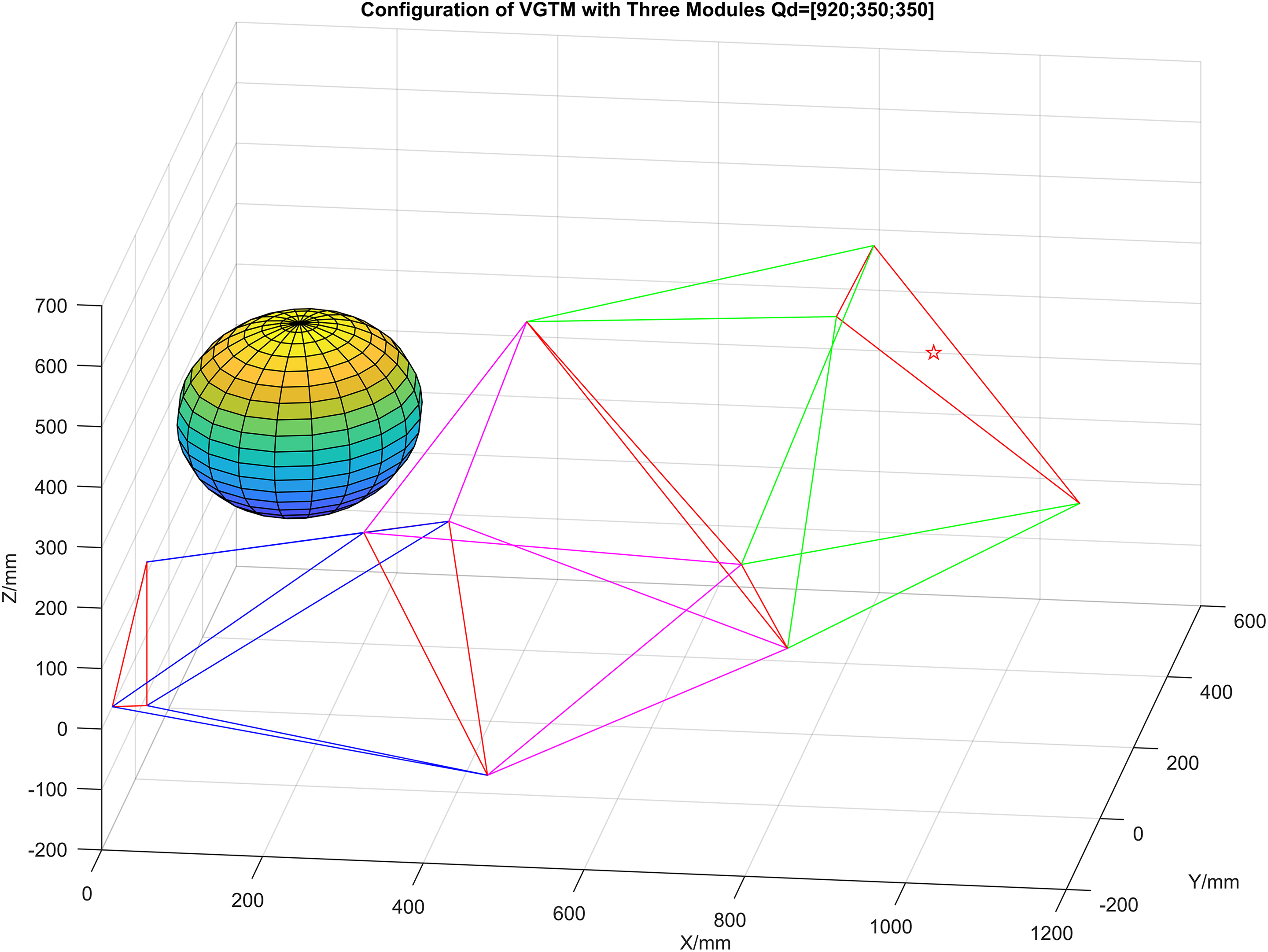
Configuration of asymmetrical octahedral VGTM for obstacle avoidance with Qd=[920;350;350]. VGTM: variable geometry truss manipulator.

Configuration of asymmetrical octahedral VGTM for obstacle avoidance with Qd=[1025;0;0]. VGTM: variable geometry truss manipulator.

Configuration of asymmetrical octahedral VGTM for obstacle avoidance with Qd=[1100;150;150]. VGTM: variable geometry truss manipulator.
Actuator length of each VGTM module-three modules.


Based on the data obtained from Tables 2 and 3, the average absolute positioning error of the actual terminal location calculated from the physical platform of the VGTM is 0.7917 mm, while the errors in Zhao et al. 37 and Yang et al. 38 are respectively 3.3352 mm and 7.4606 mm. Furthermore, as can be seen from Table 4, the average running time of the algorithm proposed in this article is 0.1689 s, while those in Zhao et al. 37 and Yang et al. 38 are 0.265 s and 0.233 s, respectively. That is, the VGTM can reach a given position with great accuracy in a relatively fast time.

Conclusion
The inverse kinematics with obstacles avoidance for an asymmetric octahedral VGTM has been accomplished in our article. Considering the structural constraints inherent in VGTM and obstacle information, a new inverse kinematics optimization model was proposed. The inverse kinematics is cast as a generalized nonconvex QCQP problem. By well utilizing the distinctive characteristics of the actual optimization problem established, the inexact interior point optimization has been adjusted correspondingly, which greatly saved the computation time of the algorithm. Simulation results of obstacle avoidance inverse kinematics for a nonsymmetrical octahedral three-module VGTM validated our conclusion.
Footnotes
Acknowledgements
The authors will be greatly indebted to the editors and each anonymous reviewer for their constructive suggestions that helped to improve this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The article reported here have the joint support of both the National Natural Science Foundation of China (grant 61175028, 61374161, 61673262) and the Key Project of Natural Science Foundation of Shanghai (16JC1401100).