
Abstract
This study presented a novel control approach for rehabilitation robotic system using the hybrid system theory and the subject’s bio-damping and bio-stiffness parameters. Resistance training was selected as a paradigm. The proposed control architecture incorporated the physical therapist’s behavior intervention, the stroke survivor’s muscle strength changes, and the robotic device’s motor control into a unified framework. The main focuses of this research were to (i) automatically monitor the subject’s muscle strength changes using the online identified bio-damping/stiffness parameters; (ii) make decisions on the modification of the desired resistive force so as to coincide with the subject’s muscle strength changes; and (iii) generate accommodating plans when the safety-related issues such as spasticity and the abnormal robotic working states happen during the execution of training tasks. A Barrett WAM compliant manipulator-based resistance training system and two experiments including four scenarios were developed to verify the proposed approach. Experimental results with healthy subjects showed that the hybrid system–based control architecture could administrate the subject’s muscle strength changes and the robotic device’s interventions in an automated and safe manner.
Keywords
Introduction
Patients suffering from strokes need to receive intensive rehabilitation training to improve range of motion, movement coordination, and muscle strength. These therapy programs are traditionally conducted by physical therapists. However, the efficacy of therapist-centered rehabilitation therapy often relies on the therapist’s subjective clinical experience. In recent years, there is an increasing interest in using robotic devices to help providing rehabilitation training because these devices can provide a variety of highly repetitive movements and training protocols for stroke patients. 1
Human–robot interactive control approaches, that specify how rehabilitation robotic devices adaptively interact with stroke survivors in an automated and safe manner, are one of the major challenges in developing robot-assisted training system. The control strategies explored in some early rehabilitation robotic devices, such as the proportional integral derivative controller for MIME, 2 the impedance controller for MIT-Manus, 3 and the admittance controller for GENTLE/s, 4 are mainly concentrated on providing constant assistance while not integrating stroke patients’ feedback into the control loop. It is a common hypothesis in the field of robot-assisted rehabilitation that the control approaches, that can close the loop via the patients and further adapt robotic devices’ assistance to the stroke patients’ progress, will be more efficient. 5 This issue is typically addressed using assist-as-needed 6,7 or user-cooperative control strategies. 8,9 In the study by Hussain et al., 6 an adaptive seamless assist-as-needed control scheme is developed for the robotic gait training, which learns in real time the disability level of human subjects based on the trajectory tracking errors and adapts the robotic assistance accordingly. Riener et al. 8 presents a patient-cooperative strategy for robotic gait training, and results with healthy subjects show that subjects train more actively and only get support as much as needed. Nonetheless, the potential issue of these methods is that they focus on low-level robotic motor controllers. The training tasks update, the safety-related issues (e.g. spasticity and twitch) monitoring, the robotic working states (e.g. joint torque, voltage, workload, and end-effector velocity) detection, the therapeutic progress assessment, and the decision-making behaviors are all administered by physical therapists.
In the last few years, hierarchical supervisory control strategies have been developed. These approaches incorporate the training tasks update and the physical therapist’s behavior decision into the low-level robotic motor controller. Denève et al. 10 merge a high-level sequential controller into a robotic-assisted upper limb rehabilitation system, by which three different low-level control laws for passive, active, and resistance modes can be switched. In the study by Varol et al., 11 a three-level hierarchical supervisory control architecture is proposed, which consists of the lowest level robotic joint torque controller, the middle-level torque references generator, and the high-level intent recognizer. Fuzzy-based hierarchical supervisory control strategies are also presented in our previous studies. 12,13 Especially in the study, 13 a high-level safety supervisory controller is designed to monitor spasticity-related issues. Great improvements have been made in the current hierarchical supervisory control architecture for incorporating therapists’ behavior-decision experiences. Unfortunately, these supervisory control methods are statically designed concerning some predefined situations, and the absence of dynamic mechanism makes them incapable of dealing with the extended/unexpected events and the complex training tasks coordination. Besides, few rehabilitation robotic control system design takes the safety-related issues into consideration.
In this article, we present a hybrid system–based control architecture using resistance training as a paradigm, which can incorporate the physical therapist’s behavior intervention, the stroke survivor’s muscle strength progress, and the robotic device’s motor control into a unified framework. In fact, over the years, the hybrid systems framework has been effectively used in many fields to model and analyze their performances, such as the power systems, 14 the communication networks, 15 and the coordinated control of assistive robotic devices for complex tasks. 16
The primary focus of this article is to (i) automatically monitor the impaired limb’s muscle strength progress using the online identified bio-impedance changes; (ii) make decisions on the modification of the desired resistive force so as to coincide with the impaired limb’s muscle strength changes; and (iii) be aware of robotic working state/safety-related issues during the execution of training task and to generate accommodating plans when such events happen. The remainder of this article is organized as follows: “Methods” section presents the experimental setup and protocols, bio-impedance parameters identification, and controller development. “Results” section details the results of the proposed control strategy. Some discussions and conclusions are given in sections “Discussions” and “Conclusions”.
Methods
Experimental setup
The rehabilitation robotic system for upper limb muscle strength training used in the trials, shown in Figure 1(a), consisted of a Barrett WAM™ manipulator, a three dimensional (3-D) force sensor, and an external PC offered by Barrett Technology. 17 The standard WAM™ is a four degree of freedom highly dexterous, back-drivable manipulator. Its human-like kinematics and high back drivability enable inherent force-control, haptic interaction, and rehabilitation application. In order to record the force interaction between the impaired limb and the WAM end-effector, a 3-D force sensor was designed and attached to the end-effector. Figure 1(b) and (c) shows the mechanical structure, appearance, and strain gauges distribution of the 3-D force sensor. Force data measured from the sensor must be transformed from the WAM tool frame into its world frame. The graphical user interface developed using Linux/GDK technology, shown in Figure 1(d), was used to display the actual training trajectory when the patient moved his arm in the XOZ vertical plane (O-XYZ coordinates shown in Figure 1(a)), where no reference trajectories were predefined except for several via points. The external PC, running with the Ubuntu Linux system and the Xenomai real-time module, was responsible for executing the control loop and sending high-level commands to the WAM-aided rehabilitation training system. Real-time communication between the external PC and motor Pucks™ was conducted via a high-speed controller area network bus.

The Barrett WAM™ rehabilitation robotic system for upper limb muscle strength training and its attachments. (a) The Barrett WAM™ rehabilitation robotic system, (b) mechanical structure and appearance of the 3-D force sensor, (c) distribution of 16 strain gauges on the cross beam, and (d) the graphical user interface for muscle training in XOZ plane.
Experimental protocol
Individuals were asked to seat in a height adjustable chair in front of a computer screen. The WAM robot, under full gravity compensation, was restricted in the XOZ vertical plane with control threads. The training subjects were asked to grasp the WAM handle and to move the robot from the starting point to the end point by performing lift-and-reach exercises. The desired resistive force generated from the proposed controller was exerted on the WAM end-effector and constantly against the direction of the desired movement through the interface function defined in the WAM control loop. When the subjects arrived at the end point position, the resistive force was removed till the start point in the next training trial was detected. Before the beginning of the training session, participants were presented with five trials in order to acquaint them with the hardware and user interface. The experimental procedure was based on training blocks, and each block was consisted of five training trials.
Two experiments including four scenarios were designed. In the first experiment, two scenarios (scenario 1 and scenario 2) were developed. The scenario 1 was carried out to verify that how the proposed controller makes automated modifications on the desired resistive force by monitoring the gradual increment of the training subject’s muscle strength. The scenario 2, which simulated the spasticity case by sharply increasing the subject’s muscle strength, was developed to demonstrate the controller’s capability in dealing with the safety-related events. In the second experiment, another two scenarios (scenario 3 and scenario 4) were designed. Apart from the scenario of monitoring the gradual decrement of the subject’s muscle strength (scenario 3), a typical suspending scenario inspired by 16 (scenario 4), where the subject was asked to press the pause/stop shortcut key, was described to show that how the proposed controller modifies the training tasks in a safe manner. This pause scenario often occurs in clinical rehabilitation therapy when the stroke patients have discomfort or fatigue and want to have a rest.
The bio-impedance parameters identification
As mentioned in the studies by Tung Fai and Wilson 18 and Zhang et al., 19 the human arm’s bio-impedance parameters, bio-damping, and bio-stiffness, can reflect the arm’s muscle strength changes with high sensitivity. Based on our previous work in the study by Xu et al., 20 the subject arm’s bio-impedance characteristic was modeled as the following linear time-variant system

where fe denoted the force interaction between the robot and the impaired limb,
Using the bilinear transformation in the study by Mallapragada et al., 21 equation (1) was reorganized in the discrete-time domain as

where T was the sampling period and z−1 was one shift step in the time domain. Using equation (2), the continuous linear model was discretized to provide a model for linear estimation

where

Furthermore, equation (3) was represented as a regression vector, as follows

where θ[k] was the estimated parameter vector and h[k] and y[k] represented the input and output regression vectors, respectively.
According to the regressive least square (RLS) method with forgetting factor, we had

where λ was the constant forgetting factor, which influenced the weight given to the earlier data relative to the newly acquired data. The covariance matrix P[k] was calculated as

In the study by Mallapragada et al., 21 the estimated results using the above RLS method with forgetting factor are still not satisfactory, especially for the damping coefficient, although the given environment parameters, stiffness, and damping are constant. In clinical rehabilitation, the impaired limb’s dynamics vary randomly and its bio-impedance parameters are time variant throughout the whole rehabilitation process. It is suggested that the estimation of the impaired limb’s bio-impedance parameters using RLS method with an adaptive forgetting factor is superior to the one with a fixed forgetting factor. The forgetting factor was adapted as

where l and R were the forgetting step and parameter, respectively. In addition, the maximum and minimum forgetting factors λmax, λmin were set for preventing unfortunate disturbances. After the vector θ was estimated, the subject arm’s bio-damping

Controller design using hybrid system theory
The main idea of the proposed controller was to develop a control architecture that can incorporate the physical therapist’s monitoring and behavior intervention, the stroke survivor’s muscle strength assessment, and the robotic device’s motor control into a unified framework. Nevertheless, the behaviors of the physical therapist’s monitoring and decision-making are discrete, while the stroke survivor’s muscle strength changes and the robotic device’s exerted force and working parameters are continuous. They cannot share the same control space. To administrate the interaction between the stroke survivor and the robotic device in an automated and safe manner, it is necessary to design an interface so that the transitions between the discrete and continuous control can be established.
Hybrid system theory, 22 which can incorporate the discrete dynamic system and the continuous dynamic system into a unified framework, offers mathematical tools to develop our controller. Figure 2 shows the proposed hybrid system–based control architecture. It consisted of a high-level discrete event dynamic system (DEDS) (“controller”), an “interface,” and a low-level continuous variable dynamic system (CVDS) (“plant”). The high-level DEDS ideally playing the role of the physical therapist was designed to make decisions on the modifications of the desired resistive force by monitoring the stroke survivor’s muscle strength progress and to generate accommodating plans when abnormal robotic working states or safety-related events happened. The low-level CVDS was developed to online estimate the subject’s bio-impedance parameter changes and to achieve accurate desired force tracking control between the robotic device and the training subject. The continuous/discrete part in the interface was to accept plant inputs and to generate discrete events that the DEDS monitoring module needed, while the discrete/continuous part was to receive discrete outputs from the controller and to generate control commands sending to the robotic device force tracking controller.
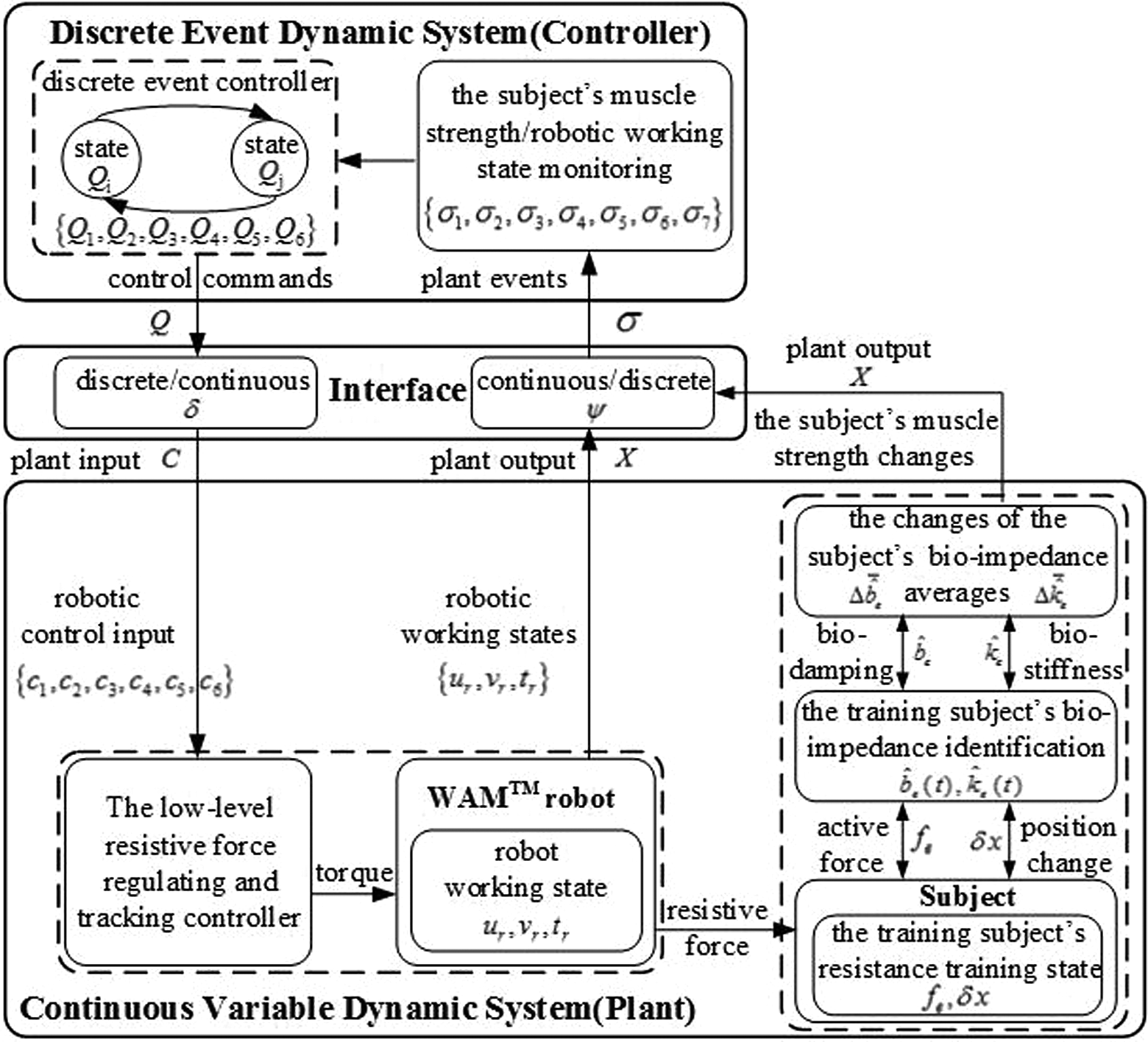
The proposed controller architecture for robot-aided muscle strength training using hybrid system theory.
The DEDS and discrete/continuous interface
The DEDS and the discrete/continuous interface were mathematically represented by
Lists of discrete control states definitions.

Lists of control events definitions.

The CVDS and continuous/discrete interface
According to the hybrid system theory, the CVDS and the continuous/discrete interface were mathematically described by
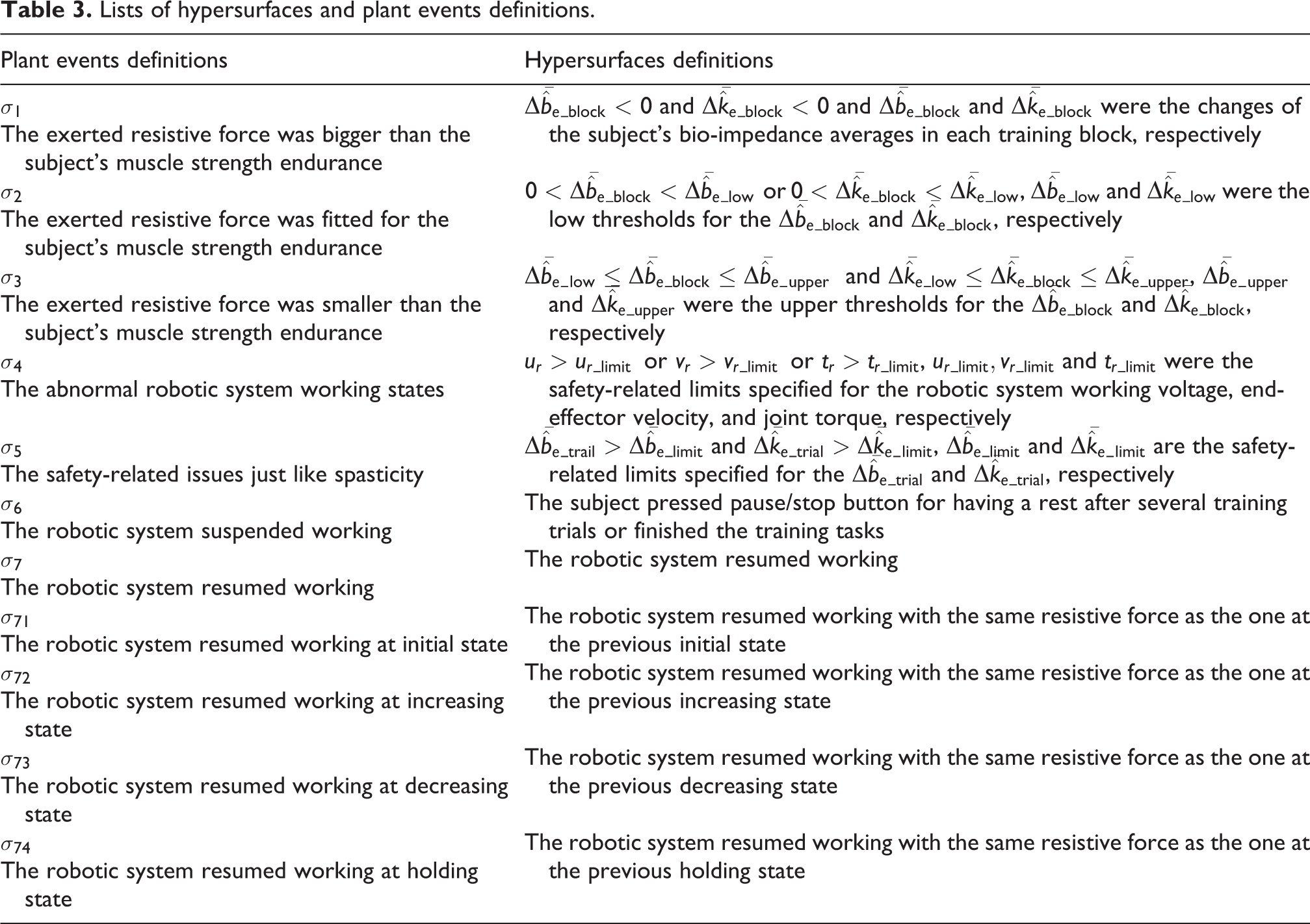
In this research, the hypersurfaces were defined based on the following two considerations: (i) the muscle strength of the subject to perform the resistance training tasks and (ii) the capability of the rehabilitation robotic system to ensure the safety of the subject during the task execution. The former can be well evaluated by computing the changes of the subject’s bio-impedance averages, and the latter may be achieved by regulating smooth motion transitions when monitoring the abnormal robotic working parameters or the safety-related issues like spasticity. When the hypersurfaces were crossed, plant events occurred.
The subject arm’s bio-damping and bio-stiffness parameters averages in each training trial and block were calculated as follows




where
Lists of hypersurfaces and plant events definitions.
Lists of the discrete control rules description.


The control states transitions based on hybrid automation.
The commands of modifying the desired resistive force generated from the high-level discrete event controller were sent to the low-level force regulating and tracking controller. In order to regulate the resistive force in a smooth and safe manner, a piecewise S-shape curve transition method 23 was adopted instead of directly giving a step-like force inputs which may give rise to unsafe tremble. When the desired resistive was smoothly regulated, it was then sent to the tracking controller to achieve accurate resistive force tracking. The following proportional (P)/derivative (D) force tracking controller presented in our previous work 17 was designed

where KP and KD were the PD force tracking controller gains and fd and fact were the desired and actual resistive force, respectively. τ F was the robot joint torque obtained from the above PD force tracking controller.
Safety
Ensuring the stroke subject’s safety is a very important issue when designing the WAM-assisted rehabilitation training system. The WAM safety systems were consisted of the safety board and the safety supervisory control threads developed in the current research, which were used to monitor the joint torques and velocities, communication between the computer and the Pucks™, voltage levels to the WAM, and other safety states including E-STOP, IDLE, and ACTIVATED. The safety systems will register a heartbeat fault and shut down the WAM manipulator, when the joint torques, end-effector velocities, and working voltages exceed the predefined thresholds or any motor controllers fail to issue communication.
Results
The subject arm’s bio-impedance identification
To demonstrate the fact that the bio-stiffness and bio-damping parameters can be used to show the subject arm’s muscle strength change, two experimental scenarios with a healthy subject were developed. The first is to perform the resistance exercises many times, and the other is to simulate a spasticity-like situation by asking the training subject to intentionally apply force against the direction of the desired resistive force. Using the trial and error method, the parameters xe, T, λmax, λmin, l, R, θ0, P0 were set as 0.576, 0.05, 0.99, 0.1, 5, 20, [1E−6, 1E−6], [2.5E+6, 2E+6; 1.5E+6, 1E+6], respectively.
Figure 4(a) describes the estimation results of the subject’s bio-damping and bio-stiffness parameters under the first scenario. As can be seen from the profiles, the training subject’s bio-impedance parameters can sensitively reflect the subject’s muscle strength changes. Figure 4(b) shows the subject’s bio-impedance parameter changes when the subject intentionally applied force. It is obvious that the estimated subject arm’s bio-damping and bio-stiffness show a substantial increase at the moment when the arm generates intentionally increased muscle force. Both the estimated results agree with the fact that the arm’s bio-stiffness and bio-damping parameters show high sensitivity and consistency to the subject arm’s muscle strength change using the proposed RLS method with an adaptive forgetting factor.
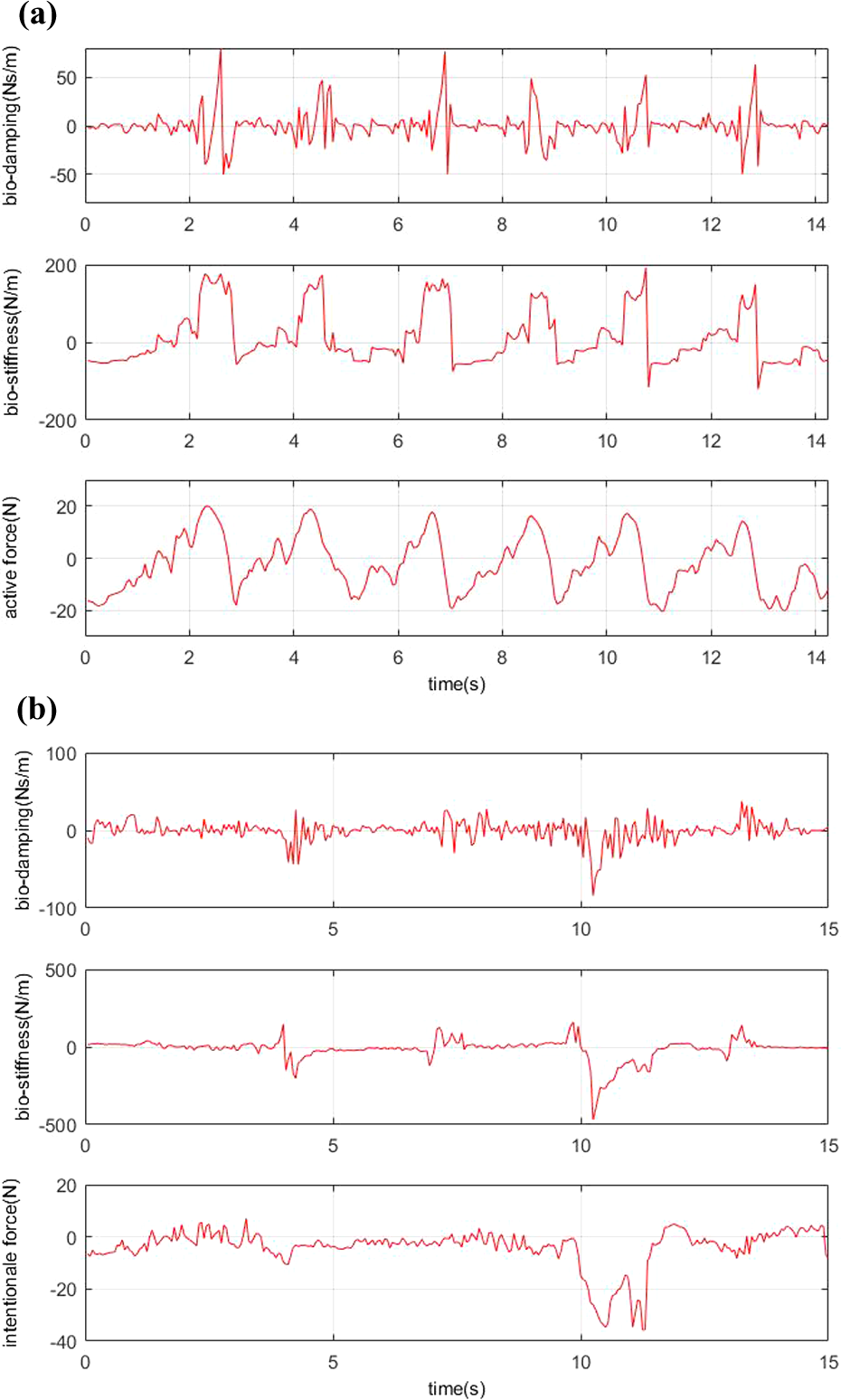
Estimation of the subject arm’s bio-impedance parameters with two experimental scenarios. (a) The subject’s regular resistance exercise and (b) the subject’s intentionally applied force.
The hybrid system–based controller regulation
To demonstrate the feasibility of the proposed hybrid system–based control architecture in generating accommodating regulations in an automated and safe manner. The performances from one healthy subject were selected as representative examples. Following the physical therapist’s advice, the low and upper thresholds for the changes of the training subject’s bio-impedance averages,
In the first case, the hybrid system–based controller regulation results concerning a healthy subject’s muscle strength improvements and spasticity-like safety-related issue, shown in Figure 5(a) to (c), were representatively analyzed. When the training task began, the initial state Q1 was activated (Figure 5(b)), and the 30 N initial resistive force was exerted on the robotic end-effector. At the end of the fifth training trial, the changes of the subject’s bio-impedance averages in the first block met requirements

The hybrid system–based controller regulation results concerning the subject’s muscle strength increment and spasticity-like safety event. (a) The changes of the training subject’s bio-damping and bio-stiffness averages, (b) the plant events and the discrete control states activation, and (c) the desired resistive force regulating and tracking controller.
The increased resistive force was held in the subsequent training trials until the changes of the subject’s bio-impedance averages increased substantially in the 23th training trial (scenario 2), where the subject was asked to intentionally increase his muscle force to simulate a spasticity situation. In this scenario, the changes of the subject’s bio-impedance averages,
In the second case, the training profile between the 60th and the 85th training trials was extracted, shown in Figure 6(a) to (c). At the end of the 60th training trial, the muscle strength increasing event σ3 was triggered (Figure 6(b)), then the increasing control state Q2 was activated, and the desired resistive force from 40 N to 45 N was smoothly achieved. The training subject performed resistance exercises in the subsequent training block with the increased 45 N resistive force. Nonetheless, possibly due to fatigue, the subject’s muscle strength cannot well sustain the exerted resistive force, which can be seen from the changes of the subject’s bio-impedance averages between the 65th and the 70th training trials,

The hybrid system–based controller regulation results concerning the subject’s muscle strength decrement and suspending event. (a) The changes of the training subject’s bio-damping and bio-stiffness averages, (b) the plant events and the discrete control states activation, and (c) the desired resistive force regulating and tracking controller.
When the subject wanted to have a rest and pressed the pause shortcut key “/” (predefined in the WAM control threads) at the 72th training trial (scenario 4, the point D in Figure 6(c), right), a suspending event σ6 was triggered and the stopping state Q5 became active. The commands of canceling the current resistive force exerted on the robotic end-effector, saving the current training task parameters, and shutting off the rehabilitation robotic system c5 were then sent to the low-level desired resistive force regulating and tracking controller. In order to achieve a smooth null actual resistive force and prevent the training subject from substantial force shock (D–D′), the S-shape desired resistive force trajectory (D–E) was planned using the abovementioned transition method. After pausing for a while, the subject wanted to continue the resistance exercise and pressed the resume shortcut key “\” at the point E′, the resuming event σ7 was generated and the resuming control state Q6 was activated. The control vector of turning on the rehabilitation robotic system, resuming the saved training task parameters, and exerting the previous resistive force on the WAM end-effector, c6, was given to the low-level desired resistive force regulating and tracking controller. Then the 40 N desired resistive force at the decreasing state and before pressing the pause shortcut key was resumed. The resuming event σ73 was triggered to activate the control state Q3. And thus the training subject could continue the resistance exercise with the same resistive force as before. Likewise, a smooth resistive force trajectory from zero to 40 N (E′–F′) was generated and good actual force tracking was achieved. The 40 N resistive force was held till the next training block. At the end of the 80th trial, the changes of the subject’s bio-impedance averages met the σ3 activation definition
Discussions
A novel control architecture for rehabilitation robotic training systems using the hybrid system theory was proposed in this research. With the presented control architecture, a paradigm study on progressive resistance training using the subject’s online estimated bio-damping and bio-stiffness changes was conducted. Preliminary results confirm the efficacy of the proposed strategy.
The advantages of the hybrid system–based control architecture in the robot-assisted rehabilitation training were summarized as the following two aspects. On the one hand, the proposed control architecture incorporated the physical therapist’s monitoring and decision-making, the stroke survivor’s biomechanical feedback, and the robotic device’s motor intervention into a unified framework. To some extent, it played the physical therapist’s roles on the therapeutic progress assessment, the behaviors decision-making, and safety-related issues monitoring. On the other hand, the hybrid system–based control architecture is open and flexible. The discrete control states and plant events may be flexibly extended or modified according to the new task requirements. Its cost of extending and modifying is far below some of the intelligent cybernetics-based control methods. In our previous work, 12 an adaptive hierarchical control framework, integrating a high-level resistive force-based fuzzy supervisory controller and a low-level resistive force triggered fuzzy regulator, is developed. The disadvantage of this control method is that if the training program makes a change or a new task is to perform, the fuzzy control rules and the membership functions will have to reprogram. More importantly, if safety-related events are generated, the only emergency way is to shut down the power supply button, but sometimes this is inconvenient or unachievable for the severe stroke survivors.
It must be noted that this is a preliminary pilot study of such a control architecture. The current research mainly focuses on the interactive control between the training subject’s biomechanical feedback such as the bio-impedance changes and the robotic device’s intervention. In the future, the stroke survivor’s physiological or even psychological feedback should also be considered.
Conclusions
In this article, a paradigm research on robot-assisted resistance training, using the hybrid system modeling technique and the subject’s bio-damping and bio-stiffness estimation, was carried out. Experimental results with healthy subjects conducted on the Barrett WAMTM manipulator verified that (1) the subject arm’s muscle strength improvements were well evaluated by the online estimated bio-damping and bio-stiffness changes; (2) the modification of the desired resistive force generated from the discrete event controller was well matched to the subject’s muscle strength progress; and (3) the proposed hybrid system–based control architecture was capable of automatically generating accommodating plans when monitoring the safety-related issues such as spasticity, and the abnormal robotic working states happen.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is jointly supported by the National Natural Science Foundation of China (61305095, 61673114, 61603195), the Key Research and Development Program of Jiangsu Province (BE2015701), the Natural Science Foundation of Jiangsu Province of China (BK20141426, BK20140878 and BK20170898), the Qing Lan Project of Jiangsu Province of China (QL00516014) and the Jiangsu Overseas Research & Training Program for University Prominent Young & Middle-aged Teachers and Presidents.