
Abstract
Nowadays, the rehabilitation robot has been developed for rehabilitation therapy. However, there are few studies on upper arm exoskeletons for rehabilitation training of muscle strength. This article aims to design a surface electromyography-controlled lightweight exoskeleton rehabilitation robot for home-based progressive resistance training. The exoskeleton’s lightweight structure is designed based on the kinematic model of the elbow joint and ergonomics sizes of the arm. At the same time, the overall weight of the exoskeleton is controlled at only 3.03 kg. According to the rehabilitation training task, we use torque limit mode to ensure stable torque output at variable velocity. We also propose a surface electromyography-based control method, which uses k- Nearest Neighbor algorithm to classify surface electromyographic signals under progressive training loads, and utilizes principal component analysis to improve the recognition accuracy to control the exoskeleton to provide muscle strength compensation. The assessment experiment of the exoskeleton rehabilitation robot shows that the dynamic recognition accuracy of this control method is 80.21%. Muscle activity of biceps brachii and triceps brachii under each training load decreases significantly when subjects with the exoskeleton robot. The results indicate that the exoskeleton rehabilitation robot can output the corresponding torque to assist in progressive resistance training. This study provides a solution to potential problems in the family-oriented application of exoskeleton rehabilitation robots.
Introduction
Although the level of medical care has been continuously improved in recent years, a large number of patients are still suffering from physical disabilities. Statistics show that more than 200 million people in the world suffer from various disabilities. 1
The movement disorder of the upper arm is mainly caused by musculoskeletal injuries or nerve injuries caused by stroke, myasthenia, fracture, hemiplegia, and other diseases. Long-term nonexercise will cause more serious muscle damage and worsen the condition. 2,3 At this stage, the intervention methods of mirror therapy, virtual reality training, and repetitive task training can effectively promote the rehabilitation of injured limbs. 4 However, it is difficult for patients to restore their injured limbs to normal levels during hospitalization. Therefore, home-based rehabilitation training is a key factor for post-rehabilitation treatment, which is proved to efficiently reduce the anxiety of the patients and help them regain the ability to participate in social activities. 5,6 However, these rehabilitation exercise prescriptions still require nursing staff or family members to assist patients in rehabilitation training, which is time-consuming and labor-intensive.
Rehabilitation robot can provide long-term repetitive training to promote neural plasticity. Some exoskeleton robots with multiple joints in series have been developed for repetitive task training, with unlimited arm workspace in rehabilitation movement and good human–robot interaction performance. 7,8 Virtual reality is often introduced in the procedure to improve training duration and stimulation effect. With the assistance of the exoskeleton, the patient approaches or follows a target through the guidance of the scene. The doctor constantly adjusts the target position so that the patient’s limb movement ability can be trained during this process. The output torque of the rehabilitation exoskeleton is designed according to the rehabilitation training. In the active or passive training mode, the exoskeleton is mainly responsible for loading the arm for exercise or correcting the movement of the arm. Strength training will be introduced into the exercise prescription when the patient’s movement ability is improved, which requires additional training load on the basis of repetitive tasks.
Strength training can quickly and effectively promote the recovery of muscle strength, thereby improving the exercise capacity of the limbs. 9,10 As a strength intervention, progressive resistance training has been proven to enhance neurological adaptability and muscle strength. 11,12 Xu et al. proposed an adaptive hierarchical therapy control framework and applied it to a graspable traction robot rehabilitation system. This robot system can provide resistance training for improving muscle strength recovery. 13 Meattini et al. designed a human-in-loop control method for rehabilitation training of arm muscle strength. The study used a Franka Emika Panda robot as a traction tool to provide external resistance in human–robot interaction. 14 The robot system is not suitable for home use due to its high cost, large volume, and weight. Edward et al. have developed a lighter rehabilitation robot that uses eddy current brakes as a passively drive. The lower cost can make it possible in family use. This robot, combined with kinematic redundancies, can directly generate resistance against the movement of the user. 15 Unlike robots using the traction interaction method, exoskeleton robots move in parallel with limbs so that the training is focused on the muscle groups that need rehabilitation. Because rehabilitation exoskeletons designed for repetitive task training are difficult to provide support forces for additional loads, so assisted strength training is a challenge in the design of rehabilitation exoskeleton. Moreover, the existing rehabilitation exoskeleton is rarely studied for strength training.
Lightweight, customized exoskeleton rehabilitation robots are the development trend of home-based rehabilitation technology. 16 The application of 3D printing and virtual simulation technology fulfils the design of the robot prototype and improves the feasibility check of human–machine interaction. 17,18 Bouteraa et al. designed a hand rehabilitation exoskeleton robot in Solidworks that fits the movement characteristics of the finger joints based on the hand structure. The exoskeleton is 3D printed and combined with a virtual reality training system to continuously monitor and evaluate the rehabilitation process, thereby providing useful feedback for patients and therapists. 19 Based on the co-simulation method, Pineda-Rico et al. designed an arm exoskeleton robot for active and passive rehabilitation training. The structure and dynamics modeling of the exoskeleton are completed in a virtual simulation environment and can allow 3D printing to generate personalized equipment. 20 A 3D printed arm rehabilitation exoskeleton was designed to solve the rehabilitation training in developing countries. The arms and hands dimension can be adjusted in the virtual simulation environment to generate prototypes for 3D printing patients. The exoskeleton has a capacity of a lifting load of 500 g in 1 s even the transmission mechanisms are 3D printed. 21 There is no evidence that this lighter-loaded exoskeleton can meet the training intensity of progressive resistance training, but 3D printing and virtual simulation technology are helpful to the lightweight exoskeletons’ development.
One of the main control strategies for exoskeleton is dynamics or kinematics modeling. 22,23 In addition, motion capture is also involved in many studies to track the motion information of joints for dynamic modeling. 24,25 Experimental processes and data analysis in these studies are complicated and reduce the flexibility of exoskeleton in the application. Surface electromyographic (sEMG) signal can be used to form control strategies through machine learning to adapt to arm rehabilitation needs. For the control of strength-assisting exoskeleton, the time domain analysis method can be directly adopted. The strength features of sEMG signals can be obtained by selecting absolute integral, average, square root, root mean square, zero cross ratio, and so on. 26 In a previous study, researchers integrated the lower limb exoskeleton and a Smart Walker into one system for the rehabilitation of patients’ gait nerve. sEMG-based pattern classification on “sitting/standing” and knee “bending/stretching” was designed to control this hybrid robot system. 27 Myomo Company launched a mature Myopro auxiliary prosthesis, which can recognize the movement intention of the human body by collecting the sEMG signal of the human arm, such as the grip of fingers and the bending and extension of the elbow joint, thereby controlling the exoskeleton to make corresponding movements. 28 Due to sEMG signals are convenient to collect and be combined with wearable devices, sEMG control is increasingly used in low-cost rehabilitation exoskeleton devices. 19,29 Although the sEMG signal can enable researchers to measure the muscle activity level, we found that it was mainly used for movement classification or fatigue detection in previous studies, and there were few studies on training load recognition for strength training.
This article presents an sEMG-controlled lightweight upper arm exoskeleton rehabilitation robot. Firstly, the human dimensions of Chinese are taken as a functional size standard for the ergonomic design of the exoskeleton. Secondly, we proposed an sEMG-based control method based on kNN classification algorithm and improved the recognition accuracy by principal component analysis (PCA). Finally, the recognition accuracy of the control method and the assist effect of the exoskeleton is evaluated through an experiment. Compared with the rehabilitation robots in the previous study, this rehabilitation exoskeleton has a lighter structure and provides progressive resistance training that meets the characteristics of upper limb grasping and flexion movements. Moreover, the control method used in this study can recognize the training load and produce the corresponding torque for muscle strength compensation in rehabilitation training. This study could be a reference for the development of the family-oriented strength training exoskeleton.
Mechanical design
The Human Dimension of Chinese Adults (GB 10000-1988) is taken as reference for size design of the exoskeleton. 30 In order to simplify the model, the forearm and the upper arm are simplified into two rods; when one is lifting a heavy object, the upper arm is thought to be fixed, while the forearm and the palm are thought to hold the heavy object and lift it upward; thus, a simplified connecting rod model as shown in Figure 1. G1, G2, and G3 represent the gravity of the hand, external load, and forearm.

Schematic diagram on simplified connecting rod model for upper arm.
During calculation, in order to guarantee that the selected servo motor could meet requirements, both body size and inertia coefficient data are selected based on the standard of the male with a stature of 1.85 m and an overweight body weight of 90 kg. The maximum external load for man–machine system is 6 kg and thus the deduction as follows



where k 1, k 2, and k 3 are percentage of the stature of the forearm, hand, and upper arm, respectively.
Forearm length

Hand length



where p 1 and p 2 are the relative mass of forearm and hand. According to the national standard Inertial Parameters of Adult Human Body (GB/T 17245-2004), 31 the ratio between the arm and each body segment and the mass center’s relative position between the arm and each body segment of Chinese are obtained. Lcs refers to the percentage of the upper dimension of each body segment’s mass center to the total length of that body segment, and Lcx refers to the percentage of the lower dimension of the mass center of each body segment to the total length of that body segment.
Torque at elbow joint

Supposing that the forearm flexes 90° in 1 s and then there will be

The power at the elbow joint will be

Because the deltoid muscle may affect the fit of the exoskeleton and the upper arm, the length of the deltoid muscle is removed in the design of the exoskeleton. The deltoid muscle can be approached in the upper third of the arm, 32 so the upper arm length will be

According to the motion process of the forearm and ignore the exoskeleton weight, the dynamic model is simplified as

where Me
is the active torque generated by the motor after conversion, J is the moment of inertia of the forearm, C is the viscosity coefficient,
Based on the data as mentioned above and given the influence of safety coefficient, break-out torque of the motor, and other coefficients, the servo motor, and the supporting servo driver are selected, whose rated torque is 1.91 N·m, as shown in Figure 2. The high precision planetary reducer with a reduction ratio of 35 is selected; the reducer’s torque output after slowdown can reach 68.6 N·m, which can still meet the requirements after considering the energy loss during transmission. The TRQLM torque limit command is selected to control the motor in the position mode. The position command is given by the output pulse, and the external analog voltage gives the torque command. This mode can guarantee the torque under the change of velocity. The single-chip microcomputer is selected as the host computer to control the servo motor, and a wireless Wi-Fi module is added to the single-chip microcomputer to connect with the personal computer to realize the personal computer’s control of the servo motor.

Driving apparatus of exoskeleton. (a) The servo motor and the supporting servo driver; (b) the high precision planetary reducer; and (c) the single-chip microcomputer.
The wearable exoskeleton device model’s main components are the forearm part, upper arm part, elbow joint part, servo motor, and fixture part of high precision planetary reducer, as shown in Figures 3 to 5.

Four main components of wearable exoskeleton device model. (a) 3D model of forearm; (b) 3D-printed forearm; (c) 3D model of upper arm; and (d) 3D-printed upper arm.

Elbow joint part. (a) 3D model of elbow joint and (b) 3D-printed elbow joint.

Fixture part. (a) 3D model of fixture part and (b) 3D-printed fixture part.
The main function of the forearm part is to coat half-human forearms. The supporting board and the strap fix the half-human forearm on the wearable strength-assisting exoskeleton device, which is the main conduction medium for the strength-assisting torque output by the motor to the human forearm, as shown in Figure 3(a) and (b). The upper arm part’s main function is to loosely fix the upper arm on the exoskeleton robot, as shown in Figure 3(c) and (d).
The elbow joint is where the high precision planetary reducer’s output shaft, the forearm, and the upper arm connect. Since the output shaft of the planetary reducer itself is equipped with axle keys, the forearm part is designed with corresponding holes and grooves and closely matched with the output shaft with axle keys so as to transfer the force and torque output by the motor. At the same time, due to the long length of the axle key on the shaft, the elbow joint is designed with the part composed of axle key, shaft sleeve, bearing, and upper arm hole. This design makes the upper arm part independent from the process of force transmission and keeps it away from the influence of the forearm operation during transmission of force and torque. It is shown in Figure 4.
The servo motor and the high precision planetary reducer’s fixture is designed to fix the servo motor and the planetary reducer on the workbench. The servo motor and the planetary reducer are fixed on the workbench by the fixture, and the reaction force is transmitted to the workbench through the fixture. The schematic diagram of the 3D model and the photo of the part’s material object is shown in Figure 5.
The 3D model effect drawing of the whole assembly and the photo of the material object processed is shown in Figure 6. The printing material is polylactic acid, and the filling degree of printing is 50%. Except for the servo motor (1.5 kg) and planetary reducer (1 kg), the total structure weight of the exoskeleton is 0.53 kg. Table 1 shows a weight comparison between the exoskeleton designed in this study with the existing exoskeletons.

Assembly of the exoskeleton. (a) 3D model of the exoskeleton and (b) assembled exoskeleton.
Weight comparison of current upper limb rehabilitation exoskeleton.

sEMG-based control method
Control flow
Firstly, the sEMG signal of the human body’s upper arm is obtained, and the signal is preprocessed to obtain a signal eigenvalue matrix. The kNN algorithm is then used to classify and recognize the training loads, and the parameters are optimized to improve the recognition accuracy. The PCA is used to reduce the dimensionality of the eigenvalue matrix to improve the recognition accuracy rate further. Finally, the Arduino microcontroller is used as the host computer to control the servo motor to output the assist torque under different loads. The control flow is shown in Figure 7.

Sketch of the control flow.
Collection hardware
The MYO armband bracelet (MYO company) is used to collect sEMG, as shown in Figure 8, which has 24 electrodes in eight channels. Raw data of sEMG are collected by MYO armband bracelet connected with computer via Bluetooth. Those eight-channel data can be stored in a matrix form through a program in the end. The form of each row vector in the matrix is “timestamp + real-time sEMG value at 1–8 channels.”

The MYO armband bracelet.
sEMG signal classification based on kNN
sEMG collection
Subjects cleaned and dried their arms and then wore the MYO armband bracelet, stretching their arms horizontally and turning their palms downward. After wearing bracelets at the specified body part, subjects could move freely to adapt to the bracelet and warm it up. After this, subjects connected bracelets with the computer via the Bluetooth by connection movement, which move as bending their elbows, placing their forearms at about 30 cm in front of their chests, and then naturally holding their fists. Experimenters then checked the connection between the bracelet and the computer.
Twenty healthy male college students are equally assigned to two groups. To ensure the validity of experimental data, the subjects are reminded to avoid caffeine and alcohol ingestions, smoking and strenuous activities, and sleep well the day before the experiment. Mean values (standard error of the mean, SEM) of age and BMI are 23.1 (1.6) years, 21.6 (1.9) kg/m2, respectively. Under static and dynamic tests, each load test interval is 30 min to prevent the subjects from developing muscle fatigue. (1) Static test
After moderate exercise, subjects sit upright naturally, suspended their right arms in midair, put their elbow joints of right arm at the intersection of the centerline of the dashboard and keep their right upper arms coincident with the upper arm line on the dashboard. The upper arm and the forearm should keep stationary for 10 s along the straight line at three angles of 180°, 135°, and 90°; the progressive resistance load should be 0 kg, 2 kg, 4 kg, and 6 kg. The weight should be held horizontally (it should keep level with purlicue). Each load test should be repeated three times. The static test procedure can be seen in Figure 9.

Static test procedure.
(2) Dynamic test
Subjects should be familiar with the experimental process. Under the direction of a metronome with 60 beats per minute, the forearm moved from 180° position to 90° position within 1 s and then recovered the position within 1 s.
After being familiar with the process, getting rest, and being relaxed, subjects sit upright naturally, suspend their right arms in midair, put their elbow joints of right arm at the intersection of the centerline of the dashboard and keep their right upper arms coincident with the upper arm line on the dashboard. The progressive resistance load should be selected as 0 kg, 2 kg, 4 kg, and 6 kg, and the way to hold the weight should be horizontally (it should keep level with purlicue). The test is conducted under the metronome’s direction with the arms extended and bent 10 times in 20 s. Each load is tested three times. The dynamic test procedure can be seen in Figure 10.
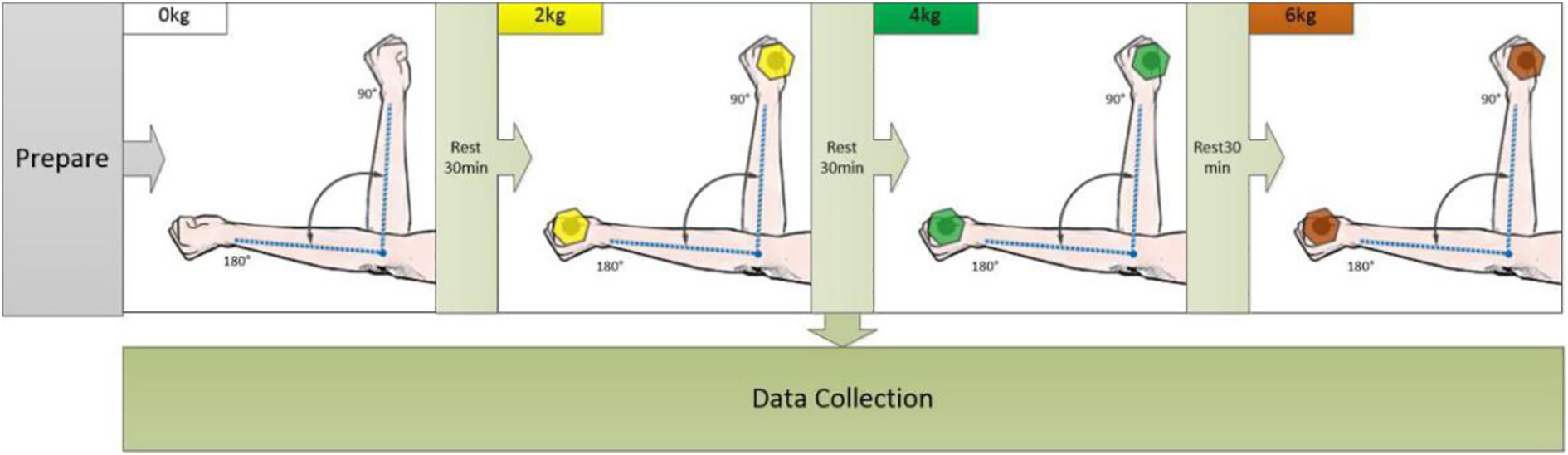
Dynamic test procedure.
Extraction and classification
The kNN algorithm’s significance is that if most of the k elements with the strongest similarities of the sample in the feature space belong to one category, the sample is classified into that category, where k is generally chosen to be an integer ≤20. 36 The element with the strongest similarities is generally defined as the closest distance, and that distance is generally adopted as Euclidean distance:

The original sEMG is preprocessed, and the eigenvalue is extracted to obtain a 2D eigenvalue matrix as the training set of the kNN algorithm. After that, a verification set is established, and the set’s identification accuracy is calculated by different values of k. After comparison, the k value with the highest recognition accuracy is selected.
The verification set is constructed first, and the element number in the verification set is taken as 1/4 of the testing set. There are nine sets of data under one weight value in one channel, which are labeled as 1 to 9 according to the order stored in the matrix. By the Randi number, the following features of elements in the testing set can be obtained, channel number (1–8), weight (0 kg, 2 kg, 4 kg, and 6 kg), and sequence number (1–9). The resulting elements from 288 times the process mentioned above are stored in the verification set.
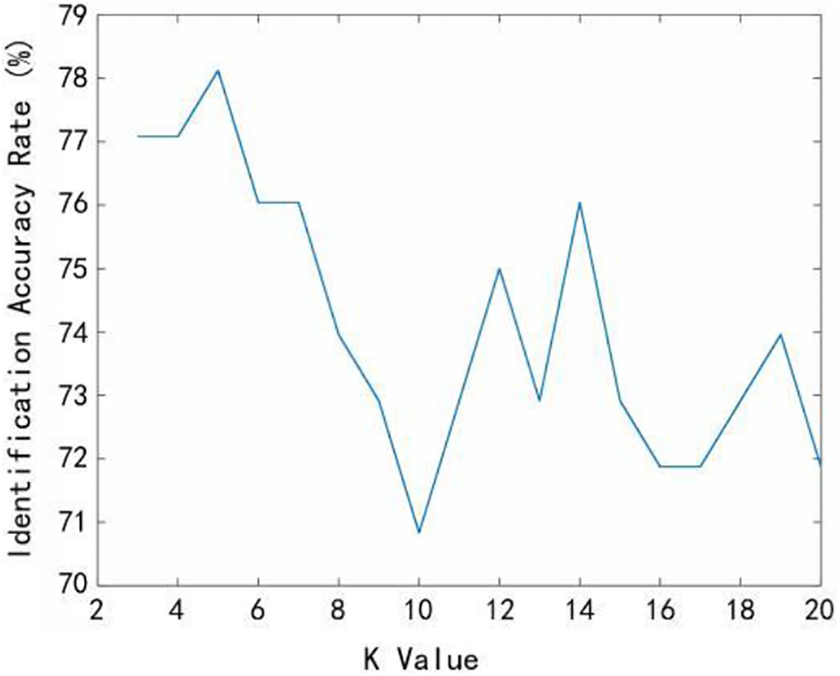
The algorithm’s recognition results in terms of the randomly obtained testing set by different values of k are shown in Table 2, where the value of k ranges from 3 to 20.
Identification accuracy rate of verification set under different values of k.

In order to see the relationship between k value and recognition accuracy rate more intuitively, Table 2 is drawn as the line chart shown in Figure 11.

Identification accuracy rate of verification set under different values of k.
After the confirmation of the optimal parameter of the kNN algorithm by verification set, the classification accuracy rate of the algorithm is verified by the testing set. The element number of the test set is selected to be 1/4 of the element number of the training set, 288 in total.
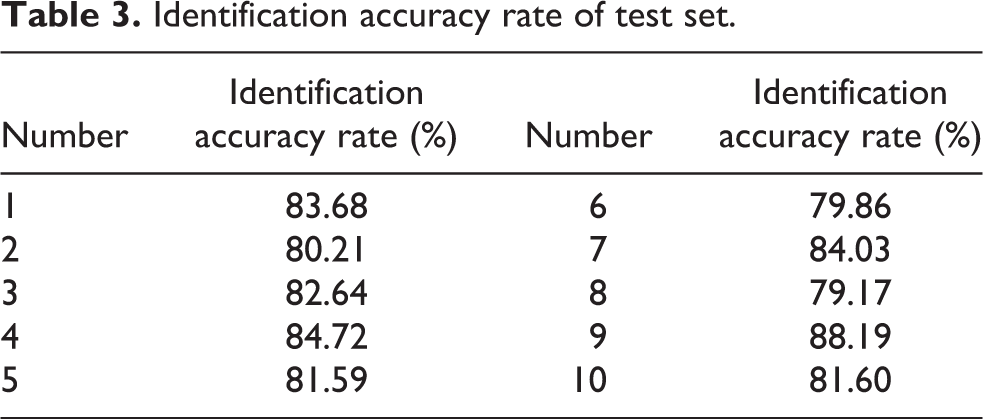
The test set is obtained through the Randi function in the same way as the training set is obtained. The eigenvalue matrix of the test set is extracted. The kNN algorithm is used to classify and calculate the recognition accuracy rate. The process mentioned above is conducted 10 times in total, and the recognition rate for each time is shown in Table 3.
Identification accuracy rate of test set.
There might be the problem of redundancy given that five eigenvalues are used in the classification process. Based on that idea, a PCA is adopted to reduce the dimension of the eigenvalue matrix. Ten tests are conducted to the new training set, which is reduced to different dimensions (2, 3, and 4) by PCA method and the test set. Table 4 shows the resulting recognition accuracy rate.
Recognition accuracy rate under different dimensions.
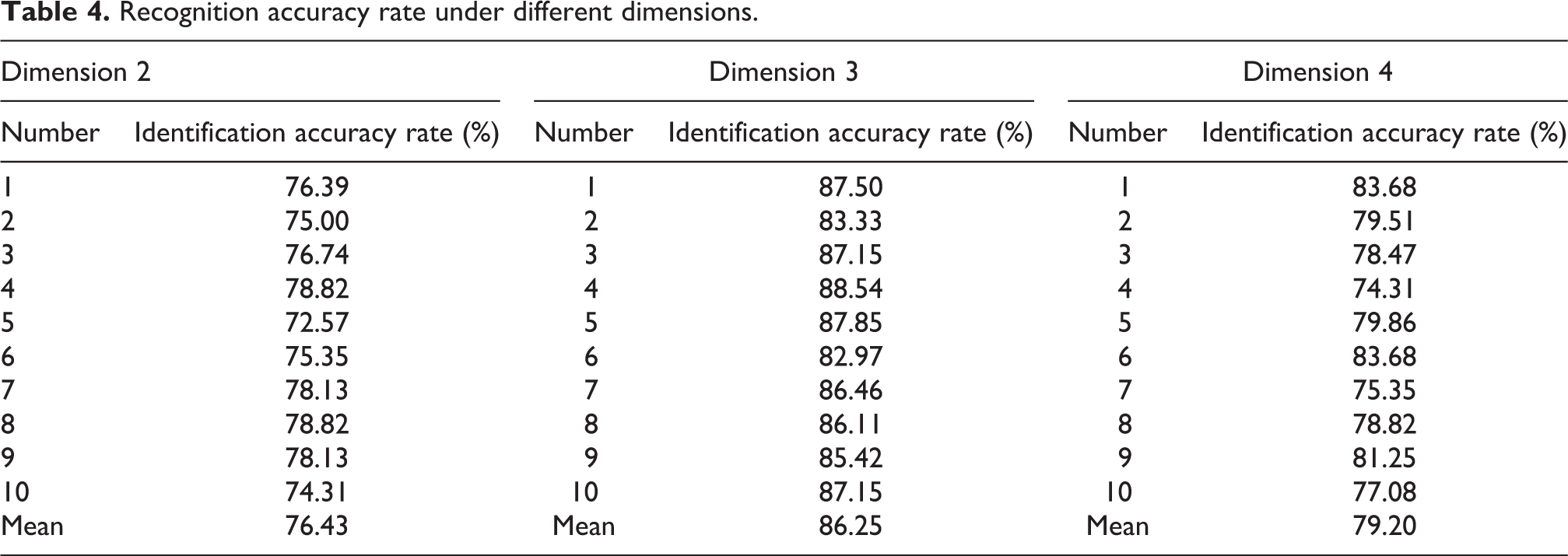
As one can see from the Table 4, the recognition accuracy rate is the highest, 86.25%, when the PCA method is adopted to reduce the dimension of both training set and test set to three dimensions. There is a certain degree of improvement compared with the accuracy rate (82.57%) with no PCA algorithm adopted.
The PCA algorithm is adopted to reduce the dimension of the training set to three dimensions. Then, the projection of the elements in the five-dimensional training set on the three-dimensional training set is understood relatively intuitively through the point cloud map projected by the training set elements, which is shown in Figure 12.

3D scatter diagram of elements in a training set after projection.
Assessment on strength-assisting performance of the exoskeleton
Assessment method
The strength-assisting process of exoskeleton went as identifying the load-bearing under static holding and controlling the torque output by exoskeleton to assist the strength. The following analysis method is adopted to evaluate the recognition accuracy: The dynamic sEMG during strength assisting is collected in terms of such a process. The dynamic signals collected during previous experiments are used to be the training set for the classification of aforesaid dynamic sEMG.
Upper arm muscle activity is measured to evaluate the difference between using and without an exoskeleton. The maximum voluntary isometric contraction (MVIC) of biceps brachii (BB) and triceps brachii (TB) from each participant are collected before the start of the experiment, which is used to normalize sEMG data. The MVIC is performed according to the standard movements of the muscle strength testing positions. 37 The muscle activation with and without exoskeleton is calculated based on the first three actions at the same speed under different test loads. Paired t-tests are performed to analyze the variables. The significance level is set at α < 0.05.
Assessment experiment
After hearing the first beep of the collection program, the experimenter slowly removed the force and guaranteed subjects to load the full weight at the second beep.
The exoskeleton would assist with strength after the subject held the load. The strength-assisting torque would be the product of the weight recognized. A computer collects sEMG during the process. After the exoskeleton had completed its stroke and been reset, the data are stored in a computer by the experimenter, and subjects take a rest.
The above process is performed 20 times for each load of 2 kg, 4 kg, and 6 kg with and without a strength-assisting state. The experiment process is shown in Figure 13.

Experiment process of strength assistance.
Evaluation results
The verification set is adopted to find the optimal k value, and the test set is then adopted to verify its recognition accuracy rate. Figure 14 shows the recognition rate under different values of k in the dynamic test. Therefore, the parameter k is taken as 5 (k = 5).
Recognition rate under different values of k.
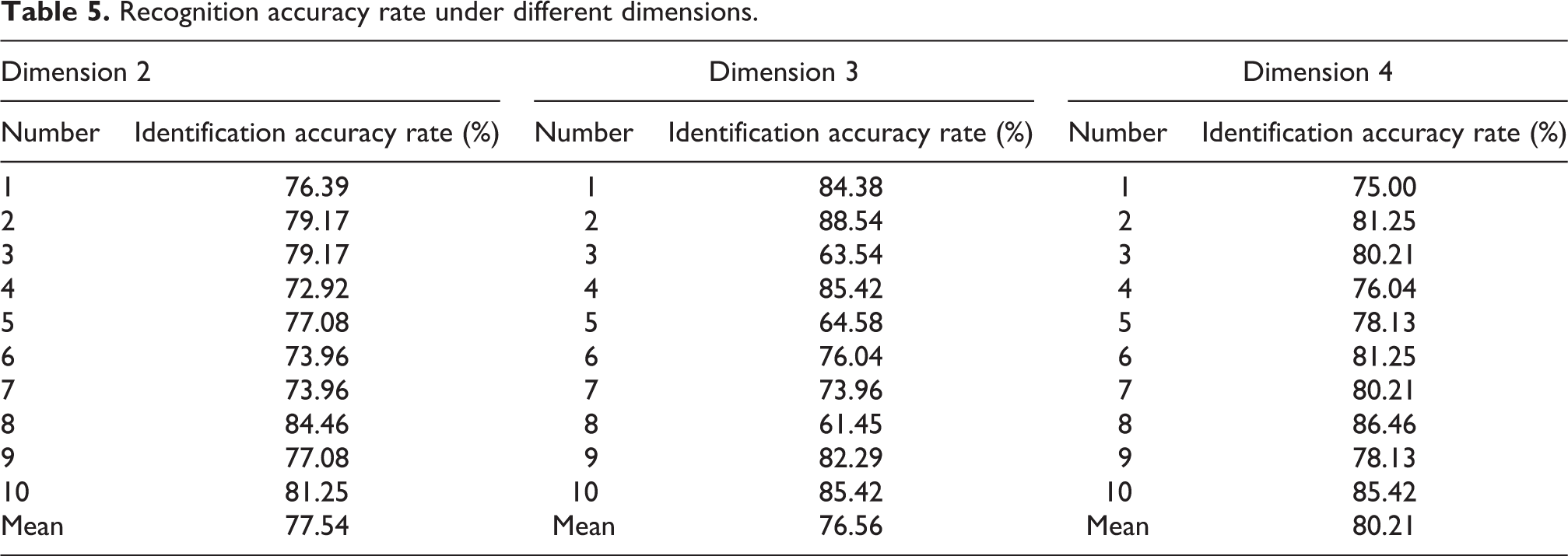
The dimensionality of the eigenvalue matrix is reduced to different dimensions by PCA. The recognition accuracy rate is shown in Table 5. The accuracy rate is the highest when PCA reduces the dimensionality to four dimensions. The dynamic recognition accuracy is calculated to be 80.21%.
Recognition accuracy rate under different dimensions.
Three dimensions out of the four are selected where the point cloud map is drawn so that one could feel the distribution of the eigenvalue element points more intuitively after dimensionality reduction by PCA. Those with obvious features are selected, as shown in Figures 15 and 16.

Point cloud map projected with one, two and three dimensions.

Point cloud map projected with two, three and four dimensions.
Figure 17 shows the results of muscle activity when the subject under the different loading levels with and without the exoskeleton. We found a significant decrease of the muscle activity in the BB (25.93%, p = 0.03) and (7.22%, p < 0.05) TB at loading at 6 kg when subjects wear the exoskeleton. For loading at 2 kg, the muscle activity in the BB decreased by 13.91% (p < 0.05) when wearing the exoskeleton. Meanwhile, the muscle activity in the TB decreased by 3.33% compared to the state with the exoskeleton. For loading at 4 kg, the muscle activity in the BB and TB decreased by 8.07% and 2.72% (p < 0.05), respectively.

Muscle activity with and without the exoskeleton. *p < 0.05 means there is a significant statistical difference between with and without the exoskeleton robot.
Discussion
The purpose of this research is to design and evaluate an sEMG-based lightweight upper arm exoskeleton rehabilitation robot, which can be applied to the resistance training in the rehabilitation of patients.
The weight of the exoskeleton is the potential obstacle in home environment applications. To obtain greater joint torque, the design of structure and motors could increase the weight of the exoskeleton. In this article, a lower exoskeleton structure weight is obtained, and the output torque meets the joint torque required for progressive resistance rehabilitation training. The arm structure through 3D printing can be customized for different user sizes and reduce customized development costs. Some studies have also used 3D-printed structures and different actuation systems to reduce the exoskeleton’s weight, including flexible fluidic actuation using bellows and Bowden cables. 38,39 Nevertheless, these exoskeletons are mainly used in repetitive task rehabilitation training, so their output torque is much lower.
The sEMG signal and kNN algorithm are used in this article to control the robot-assisted rehabilitation exercise. This classification method shows higher performance than other classification methods, such as support vector machine and linear discriminant analysis, in the previous study. 40 In this study, the recognition accuracy of this method reaches an 86.25% correct classification rate. Different from the recognition of actions in the previous study, it is found through the assessment experiment that the classification accuracy presents a specific difference under training loads, and this may cause a decrease in the accuracy of dynamic recognition (about 6%) in the evaluation stage. After the PCA algorithm reduces the dimensionality of the training set to three dimensions, it can be seen in the three-dimensional scatter diagram that the point distribution is divided into eight planes corresponding to the eight channels of the MYO armband. It can be seen that the point distribution on the respective planes of the eight channels presents a comet. When the external load is low, the point distribution is dense, indicating the data jitter is light. After the load increase, the point distribution becomes loose and irregular, indicating a serious data jitter. It can be seen that the effect is better when the armload is light but goes worse when the external load increases. For example, it can be seen that the overlap degree of the region of point distribution of 0 kg and 2 kg is far less than that of 4 kg and 6 kg.
Reasons may be caused by progressive training loads. Loads of 0 kg and 2 kg are within the mild intensity range of muscle strength. At this time, the human arm muscle strength has not reached its limit; its contraction is the shortened contraction. The correlation between sEMG and weight is better and easier to identify. However, weights of 4 kg and 6 kg are overweight to the muscle. Human arms muscle activity also closer to its critical condition, and its contraction is the isometric contraction. sEMG generated by arm muscle under both weights is very violent and with little difference. Therefore, the corresponding point distribution areas are highly overlapped in the scatter diagram.
Muscle activity reflects significant differences between with and without the exoskeleton state in each training load. The assistance performance under 2 kg and 6 kg is better than that of 4 kg. This is due to the influence of recognition accuracy. The result of loading at 6 kg suggests that the exoskeleton’s torque output can maintain the assistant performance under a high-intensity training load. From the perspective of the two main activity muscles, the BB’s decrease in muscle activity is higher than that of the TB, which may be due to differences in muscle activity caused by training, and the BB has batter independence. 41,42 In future exoskeleton-assisted rehabilitation training, the designer can evaluate the degree of muscle damages of patients and set the exoskeleton-assisted training mode for different muscles.
Conclusions
The study focuses on a lightweight exoskeleton rehabilitation robot for muscle strength training. The exoskeleton is designed based on 3D printing technology and a bracelet-type sEMG collection device. The design method makes the exoskeleton lighter (3.03 kg) and easy to customize and apply to home-based rehabilitation training. The experiments are designed to collect the sEMG of the upper arm of subjects under progressive training loads. We obtain the eigenvalue matrix and use the kNN algorithm to classify these training loads. The PCA is employed to reduce the dimensionality of the eigenvalue matrix to improve the recognition accuracy rate further. In the assessment phase, the sEMG signals with and without the exoskeleton were collected to evaluate the control method and the assisting effect. The results show that the sEMG control mode based on the kNN algorithm has higher recognition accuracy for the training load. Simultaneously, muscle activity in BB and TB indicates that the 3D-printed exoskeleton rehabilitation robot can output appropriate joint torque to implement progressive resistance training of the upper arm. This article provides a family-oriented rehabilitation exoskeleton robot for patients who need to improve their muscle strength in the post-rehabilitation training.
Future work will focus on improving recognition accuracy, and the control system will be designed to train different muscle groups to improve the adaptability of the exoskeleton rehabilitation robot.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is funded by the National Key Development Plan Project of Intelligent Robot, Ministry of Science and Technology of China (No. 2017YFB1300505), National Natural Science Foundation of China (No. U1813212).