
Abstract
Soft robotic grippers are advantageous for tasks in which a robot comes into close contact with a human, must handle a delicate object, or needs to conform to an object. Most soft robotic grippers, like their hard counterparts, require actuation to maintain a grip on an object. Here, we present a passive, soft robotic gripper that requires power to open and close but not to maintain a grip, which can be problematic in environments with limited energy availability (e.g. solar or battery power). Passive grip, by not requiring power to maintain grip on an object, provides a unique and safe alternative to energy-limited or energy-scarce environments. The Tufts Passive Gripper was inspired by the passive grip of the Manduca sexta and the simplicity of the Fin Ray® Effect. The gripper can be three-dimensional printed as one part on a multimaterial three-dimensional printer and only requires four additional steps to install the motor/tendon actuation mechanism. The gripper was capable of picking up over 40 common household objects, including a tissue, a pen, silverware, a needle, a stapler, a cup, and so on. The maximum load a gripper could hold when oriented perpendicular and parallel to the ground was 530 g (1 lb) and 240 g (0.5 lb), respectively.
Introduction
Bio-inspired manipulators have their roots in the mid-20th century with hand-like grippers such as the Okada hand, 1 Stanford/JPL hand, 2 and the Utah/MIT hand. 3,4 These hands mimicked the bones and tendon structure of the human hand and were primarily driven by tendon/motor systems. However, these hands, and many of the hands that have come since, 5 –10 lacked the soft characteristics of the human arm and do not stay closed without power, an ability which can increase safety and decrease energy consumption.
To fully exploit the biologic design of animals in bio-inspired or bio-mimetic robots, the extent of the softness of these animals must be considered. For example, a human has four times as much skeletal muscle as skeleton, resulting in a body that, including tissue, is over three-quarters soft 11 ; yet, most bio-inspired robots are predominately hard. These soft parts that humans and other animals contain provide numerous benefits for interacting with the environment: the elastic properties of the muscle/tendon system allow for impact absorption and traversal of uneven terrain, 12 the ability of bodies to deform enables exploitation of a range of environments, 11 and skin provides grip and sensing for conforming to a wide variety of objects without damaging the object or manipulator. 13
Three robotic hands that exemplify a combination of hard and soft parts in order to achieve bio-inspired and bio-mimetic grippers include the iHY Hand, 14,15 TWENDY-ONE, 16 and a hand composed of McKibben actuators. 17 These hands have a ratio of soft to hard parts much closer to that of an animal, are conformable, can perform a variety of different grips with minimal additional control, 18 and incorporate sensors into their “skin.” On the softer side of the robotic manipulator spectrum, a number of researchers 19 –22 have fabricated entirely or almost entirely bio-inspired soft grippers capable of sensing and manipulation objects without damaging them. While these robots 14 –17,19 –22 meet the criteria for both bio-inspired/bio-mimetic and soft robots, they all involve multistep and multipart fabrication processes.
We present the Tufts Passive Gripper (TPG), a passive, bio-inspired gripper incorporating soft and hard components that can be three-dimensional (3-D) printed as a single part and has limited additional steps to attach the motor/tendon system for actuation. This manipulator is inspired by the Manduca sexta, which is a passive gripper requiring no energy to grip an object but must activate its muscles to release, and the Fin Ray® Effect, which is derived from the anatomy of fish fins. The following sections detail the inspiration, design, and testing our passive gripper as well as future directions.
Design and manufacture of the passive gripper
The design criteria for the TPG were chosen for a gripper operating in a home environment (e.g. an assistive robot for the disabled) or in a factory environment (e.g. for pick and place tasks). The criteria were as follows: (1) minimal energy expenditure, (2) ability to pick up a wide range of common objects (e.g. pens, glasses, paper, cups, silverware) without damaging them, (3) capability to conform to objects, and (4) capacity to hold up to 2300 g (5 lb). The driving force behind these criteria was the desire to use a soft, passive gripper that could be used both as a substitute for the Baxter Robot (Rethink Robotics, Boston, MA, USA), which can only carry less than 2300 g, and as the manipulator on a soft robotic assistant for the upper mobility impaired (e.g. someone with Amyotrophic Lateral Sclerosis (ALS) or a spinal cord injury).
In robotics, passive grippers have two main advantages over active grippers. First, passive grippers minimize power consumption. In power-limited environments, such as those where robots rely on battery or solar power or have unreliable access to power, passive grippers provide a unique solution. Since the gripper only has to be activated to open and close and does not require power to sustain the grip, energy can be saved in order to prolong the life of the robot. Second, the passive grip provides a built-in fail-safe in the event of power loss.
Our inspiration, the M. sexta, more commonly known as the tobacco hornworm, employs passive grip as a method of energy conservation. This allows energy that would otherwise be used to maintain their grip on a branch or leaf to be used for growth and preparation for pupation. The prolegs of M. sexta use grappling hook-like crochets to dig into the substrate they are gripping, as illustrated in Figure 1. To release from the substrate, the animal pushes the crochets down, rotates them outwards, and then retracts the crochets.

The passive grip of the Manduca sexta provided the inspiration for the Tufts Passive Gripper. M. sexta prolegs have a number of crochets, which help them grip objects without expending energy. (a) Larval Manduca sexta. Ruler depicts centimeter. (b) Magnified view of crochets.
Our other inspiration, the Fin Ray® Effect, provides a geometry that conforms easily to objects it comes in contact with. The Fin Ray® Effect was developed by Leif Kniese of EvoLogics 23 and inspired by fish fins, which bend in the opposite direction of the force applied. Depicted in Figure 2, the Fin Ray® geometry is essentially two beams connected to each other at one end (the tip) with crossbeams of increasing length spaced between the tip and the base. The connections between beams and crossbeams are flexible. The deformation caused by a point force applied to the side of one of the beams causes deformation of the entire structure. This causes the tip to bend toward the force, resulting in grip. 23 –26 Altering the angle of the crossbeams with respect to the base creates a preferred bending direction, as previously demonstrated, 27 that we can take advantage of to decrease the load the motor must provide to actuate the gripper.

Fin Ray® Effect inspired finger conforming to an object (left) and being pulled away from the object by the tendon (right).
Combining these two inspirations resulted in adapting the Fin Ray® Effect for a passive gripper that behaves similar to the M. sexta proleg. Tendons attached to anchor points on the gripper are wound around a pulley on a servomotor shaft, causing the gripper to open. To close, the servo is spun in the opposite direction. The HS-645MG High Torque, Metal Gear Premium Sport Servo (Hitec RCD, Poway, CA, USA), capable of 7.7 kg/cm of torque at 4.8 V, was used as the motor, and the string was used as the tendon.
The TPG was printed on a Connex Objet500 (Stratasys, Eden Prairie, MN, USA) 3-D printer as a single, complete piece and is shown in Figure 3. The gripper is primarily soft with hard material (represented in red in Figure 3) used as finger nails, to house the motor, provide structure, and prevent unwanted deformation of the gripper, such as twisting and lateral deformation. The soft aspects of the gripper (represented in blue in Figure 3) were printed in TangoPlus (Stratasys, Eden Prairie, MN, USA), an elastomer, and the hard components were printed in VeroClear (Stratasys, Eden Prairie, MN, USA), a rigid material. 28

The Tufts Passive Gripper is 3-D printed on a Connex Object500 and composed of soft parts represented in blue, and hard parts represented in red. A pulley is mounted on a servo, which is attached to the gripper. The tendon system, shown in green, is then attached to the pulley and anchor points on the gripper.
The motor/tendon system is attached to the TPG in a four-step process. First, the pulley (3-D printed in Acrylonitrile Butadiene Styrene [ABS] on a FlashForge Creator Pro Dual Extrusion 3D Printer [FlashForgE, Rowland Heights, CA, USA]) is placed on the servo and screwed into place. Second, the servo/pulley system is screwed onto the gripper. Third, the tendon is attached to the pulley and fourth, each tendon is pulled taut and secured to an anchor point on the gripper (Figure 4).
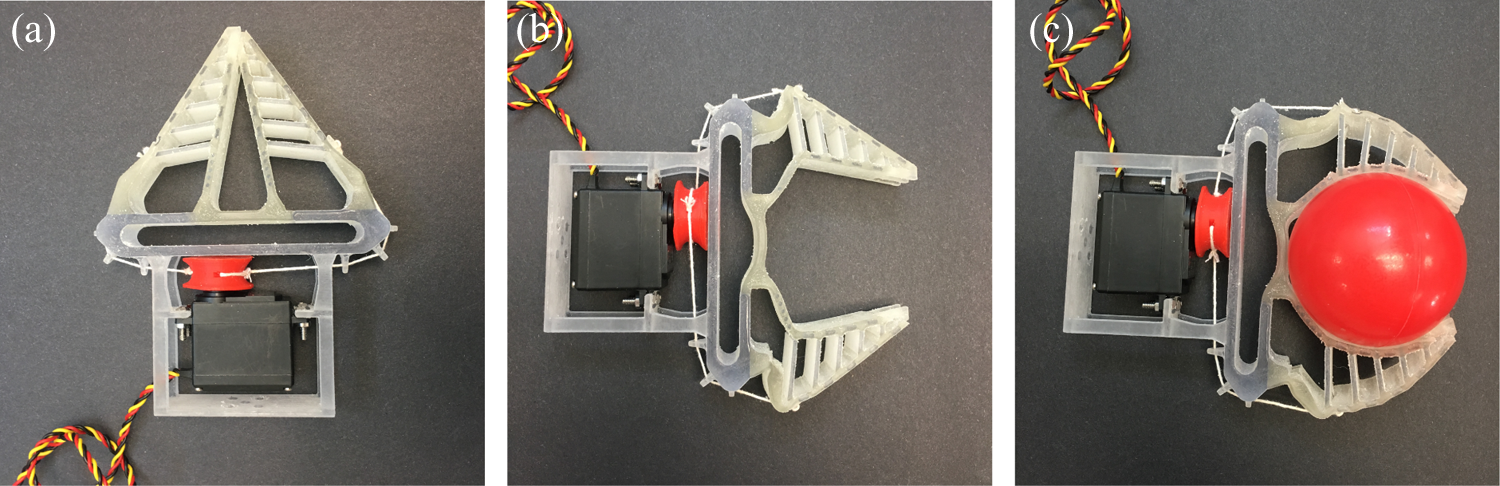
The servo winds the tendon around the pulley to open the gripper. The servo then unwinds the tendon to close the gripper around the object. (a) Larval Manduca sexta. Ruler depicts centimeter. (b and c) Magnified crochets.
The TPG was controlled by a myRIO 1900 (National Instruments, Austin, TX, USA) and was programmed in LabVIEW (National Instruments).
Experimental methods and results
Two experiments were performed on the TPG, one qualitative and the other quantitative, in order to better understand the capabilities of the gripper. The qualitative test explored the range of objects the TPG could pick up and hold and provided context for what to expect in the second phase of testing. The quantitative experiment tested the strength of the TPG by determining the maximum weight it could hold in two different orientations: perpendicular to the ground and parallel to the ground.
Picking up common objects
When designing the TPG, we determined that the gripper should be capable of picking up objects of different shapes and sizes, specifically objects that are convex, concave, angular, thin, and deformable. Testing the gripper’s success in picking up a variety of objects allowed us to explore the gripper’s behavior and elucidated several areas that could be optimized or improved.
For each object the TPG picked up, a human positioned the gripper. The gripper was opened and an attempt was made to pick up the object. This process is illustrated in Figure 4, which shows the TPG in open, closed, and gripping positions. If the gripper held the object for 10 s without slippage or dropping the object, the grip was considered successful. Objects that were picked up on the first attempt were considered easy to pick up, two to three attempts were considered of medium difficulty, and four to five attempts were considered difficult. Table 1 summarizes these findings, and a picture of the 40+ objects that the gripper picked up is shown in Figure 5.
List of objects picked up by the Tufts Passive Gripper.a

aObjects that could be picked up in one attempt were considered easy, two to three attempts considered medium, and four to five attempts considered difficult.

The passive gripper was able to pick up a wide range of objects, from tissues to cups, needles to pins, Tupperware to silverware.
Convex objects, like the PVC pipe and ball, were the easiest for the TPG to hold because the gripper could maintain a high degree of contact with the surface of the object. Other objects that were easy for the TPG to pick up included the tissue, the needle, the pen, the thumbtack, the batteries, and the pouch.
Thin objects that were also light were more difficult for the TPG to pick up, but not impossible. The finger nails allowed for the fingers to lift the object (e.g. the ID card) off the table while the gripper was being closed, similar to a person picking up a credit card or sheet of paper. The gripper did have to be closed slowly in order to successfully accomplish this task.
The hardest objects for the TPG to hold were thin object, especially thin objects with an unequal weight distribution and fragile objects. Thin objects, like the silverware, were difficult for the gripper to pick up for two reasons. First, lifting the object from the table was difficult because the gripper was not able to achieve a large contact area with the object. Second, for thin objects that were heavier, the TPG either could not exert enough force at its tip to successfully pick up the object (e.g. the wrench) or could only grip the object in one orientation (e.g. the knife held parallel to the ground). The spoon, which was not heavy but a thin object with an unequal weight distribution, repeatedly slipped from the gripper regardless of the orientation in which it was picked up. Fragile objects, like the paper cup, would be difficult for the TPG to hold without some sort of feedback.
Grip strength testing
The maximum weight the TPG could carry was determined for two separate cases: the gripper perpendicular to the ground (Figure 6) and the gripper parallel to the ground (Figure 7). For each case, the gripper was mounted to a metal frame and given a cylindrical object to hold. The weight in this object was increased in increments of approximately 20 g until the object slipped from the gripper’s grasp. Small sandbags were used as weights. Preliminary experiments determined the appropriate object for each test case. The TPG perpendicular to the ground could carry a larger load and thus was given a heavier object to start the experiment than was the gripper parallel to the ground.

When the gripper was positioned perpendicular to the ground, it was capable of holding approximately 530 g (1 lb). (a) Unloaded gripper. (b) Loaded gripper.

When the gripper was positioned parallel to the ground, it was capable of holding approximately 240 g (0.5 lb). (a) Unloaded gripper. (b) Front view of loaded gripper. (c) Side view of loaded gripper.
In the experiment with the TPG perpendicular to the ground, the gripper was given a coffee mug weighing 410 g to hold and weight was increased in 20 g increments until the gripper failed to maintain a stable hold on the mug or dropped the mug. In this vertical position, the gripper was able to carry an average of 530 g (1 lb) with a standard deviation of 23 g (Figures 6 to 8).

The Tufts Passive Gripper was capable of holding 530 g in the vertical position, approximately twice as much as the 240 g it was capable of holding in the horizontal position.
For the experiment with the TPG parallel to the ground, the gripper was given a cup weighing 40 g to hold and weight was increased in 20 g increments. In this horizontal position, the gripper was able to carry an average of 240 g (0.5 lb) with a standard deviation of 11 g, approximately half the mass of the gripper in the perpendicular condition (Figure 8).
Both of these values were consistent with weights of the common objects the gripper was able to pick up, as described in the previous section.
Future directions
The design criteria mentioned previously (minimal power consumption, ability to handle, and conform to a wide range of objects weighing up to 2300 g (5lb) without damaging them) provided the basis for analyzing the TPG’s performance. The gripper was successfully able to conform to and pick up a wide range of common objects, evidenced by the 40+ objects shown in Figure 5, while expending minimal energy. However, the TPG was only capable of handling objects weighing up to 540 g (1 lb), approximately one-fifth of the desired load. Because our gripper is made from soft material, it will deform more than the same gripper made from a more rigid material. The question to explore, then, in future designs is how to limit undesired deformations without sacrificing the benefits of using a soft material. Changes in geometry to reduce deformation in certain directions must be considered moving forward. For example, the thickness of the outer edge of the TPG could be increased.
The exploration into the range of objects the gripper was capable of holding highlighted several additional areas in need of improvement. First, the TPG should be capable of picking up thin objects like the spoon or wrench. To accomplish this, the tip of the fingers of the gripper should have more contact with each other. Therefore, when the gripper is presented with a thin object to grasp, it be able to exert more contact on the object, increasing friction and making it easier to lift the object. Second, the TPG should ultimately have feedback, perhaps in the form of a force sensor, so that the gripper does not damage fragile objects, like the paper cup. Simple force sensors can be made by sandwiching a graphite fiber/silicone layer in between two silicone layers and reading in the resistance across the graphite/silicone layer. Finally, after performing the grip strength experiments and picking up a large number of objects, the TPG started to show signs of failure approximately 1 cm below the anchor point. To remedy this, the geometry of this section between the base and the first fin should be changed. One thought is to design this section so that it is concave rather than convex. This redesign would have the dual purpose of decreasing the torque necessary to open the gripper.
Conclusions
Here, the authors present the TPG: a soft, passive gripper inspired by the M. sexta and the Fin Ray® Effect designed with the intent to be used as a manipulator for the Baxter robot and as part of a soft robotic assistant for the upper mobility impaired. The TPG only consumes power when actuating to open and close and does not require any additional power to maintain grip. It was successfully able to conform to and lift over 40 objects weighing less that 2300 g (5 lb). Objects that were convex and/or light were the easiest for the gripper to lift. Thin objects, especially those that were heavy, like a knife or spoon, were difficult for the TPG to maintain a stable grasp. Future modifications of the TPG should allow for a greater load to be held and a greater area of contact with thin objects, which can be achieved by modifying the thickness of the outer edge of the gripper and increasing the area of contact between the tips of the fingers, respectively.
To gain a better understanding of the gripper’s robustness, the ability of the gripper to exert force and torque on an object should be explored. Experiments to determine this would include opening a door and screwing a nut onto a bolt.
Optimizing the TPG and the Fin Ray® Effect in general should also be pursued. A mathematical model of the gripper is being developed in order to improve the TPG’s ability to conform to and exert force on an object.
Footnotes
Acknowledgements
The authors would also like to acknowledge Tufts University, the Center for Engineering Education and Outreach, the Neuromechanics and Biomimetics Laboratory, and the Advanced Technology Laboratory.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work has received financial support from National Instruments, NSF Award DBI-1126382, NSF IGERT Grant 1144591, and NSF Award 1444926.