
Abstract
This article presents the results of a multidisciplinary project where mechatronic engineers worked alongside biologists to develop a soft robotic arm that captures key features of octopus anatomy and neurophysiology. The concept of embodiment (the dynamic coupling between sensory-motor control, anatomy, materials and environment that allows for the animal to achieve adaptive behaviours) is used as a starting point for the design process but tempered by current engineering technologies and approaches. In this article, the embodied design requirements are first discussed from a robotic viewpoint by taking into account real-life engineering limitations; then, the motor control schemes inspired by octopus nervous system are investigated. Finally, the mechanical and control design of a prototype is presented that appropriately blends bio-inspiration and engineering limitations. Simulated and experimental results show that the developed continuum robotic arm is able to reproduce octopus-like motions for bending, reaching and grasping.
Introduction
Traditional robots typically employ rigid joints and links to form their body structures and operate using individual feedback for each actuated joint. The sensory-motor systems in such robots possess advantages in positioning accuracy and stiffness but are sensitive to changes in kinematic or dynamic parameters of the robot. This results in systems that are lacking flexibility to adapt to unstructured environments. Numerous works have been carried out to improve the robustness and adapting ability of robotic sensory-motor systems from the classic control point of view.1–3 More recently, roboticists have been looking at nature to gain inspiration and insights into the development of a new generation of robots through the application of engineering principles and design concepts based on the observation of nature. In particular, these systems are turning to the sensory-motor characteristics of animals or even plants and channelling them towards the design of bio-inspired robots.4,5 To gain a competitive design edge from nature observation, the main challenge is to find a reasonable trade-off between biological insights and real-life engineering constraints.
Animals are able to locomote, manipulate, adapt and survive in continuously changing environments thanks to the tight interplay between their brain, body and the environment they live in (often referred to as ‘embodiment’ 6 ). This interplay results in animal brains and bodies co-evolving over evolutionary timescales. Likewise, in an embodied robot, the control and mechanics should be co-designed to make the most of interactions between them and optimize performance.
Invertebrates, and in particular sea invertebrates with hydrostatic features, have generally been shown to be able to switch their hydrostatic state to fulfil the requirements of adaptation to unstructured environments. 7 Most of these adaptations are carried by a peculiarly ‘plastic’ body structure and not by a modification in the brain control strategy. This mechanism allows the living system to react to changes without having to reorganize the whole control system, and it may support the existence of an ‘intrinsic’ intelligence of the body. In this scenario, the animal body can be seen as a reservoir of strategies,8,9 where such a system may be endowed with self-sustaining mechanical capabilities as well as embedded with the ability to ‘intelligently’ react to environmental changes. One example from nature was found in the octopus, an animal that can modulate its body shape and stiffness to pass through narrow space. Hence, a question that arises is how to artificially build such a ‘mechanical’ intelligence, in other words how to design and test a non-neuronal-based robot that can achieve flexible motions like a live octopus arm.
From a robotic design viewpoint, the embodied design approach is fundamentally based on the observation that, as occurs in nature, adaptive behaviour emerges from the complex and dynamic interactions between the morphology, sensory-motor control and environment.10–12 This embodiment paradigm can be applied to a new generation of intelligent machines, moving away from the traditional view, by relating adaptive behaviours to not only control and computation but also body properties. 13 There have been some pioneer works intending to develop continuum robots that are inspired by elephant trunks14–16 and octopus arms.17,18 Using compliant body structures and actuators such robots exhibit greater capability of soft and dynamic interactions with the environment compared to conventional rigid-link-based robots. Hence, they are more suitable for applications where soft manipulation and locomotion are needed (e.g. search and rescue in narrow space 19 and minimally invasive surgery20,21).
However, it has been found that the state of the art of engineering technologies is not able to support the development of a fully bio-inspired continuum robot. For instance, current actuator systems are still too large and heavy to be implemented into a continuum robot while the output force and range are still too small for on-board operations.5,16,17,22 At the same time, the measurement and control of a compliant structure with hyper-redundant (>7) degrees of freedom (DOF) remain challenging. The aim of this article is to provide a possible way to relate the biological insights of octopuses to the design and construction of a real robotic arm, while respecting engineering constraints. The gaps between existing state of soft robotic art and a live octopus are identified and then result in a trade-off design of a pneumatically actuated continuum robot that captures key features and functions of live octopuses. The article is organized as follows. Section ‘Octopus as a paradigm of embodiment’ provides the biological insights of the octopus which is a very good example of embodiment in the natural world. In section ‘Embodied design requirements’, the embodiment requirements for a robotic arm are defined in terms of mechanical and control design. The kinematic and dynamic model of a continuum arm is presented in section ‘Kinematic and dynamic model of a continuum arm’. The embodied control strategy inspired by octopus neurophysiology is then discussed in section ‘Embodied control’. Section ‘Soft robot arm prototype’ presents the design of a soft robotic arm that is capable of stereotyped motions. Finally, conclusions and future work are presented in section ‘Conclusion’.
Octopus as a paradigm of embodiment
A paradigmatic example in nature of how body properties and morphology can significantly influence control and behaviour is found in the octopus (Octopus vulgaris). Although other biological structures, like the elephant trunk or human tongue, exhibit muscular hydrostats and high flexibility, they are not comparable with the octopus that embeds its intelligence at the arm level using a distributed nervous system and therefore can achieve motor control without the participation of the brain.10,11,23
The octopus biomechanics and neurophysiology are designed around a fully flexible muscular structure with virtually infinite DOF. As a result, it is a very dexterous animal: its arms can bend in all directions, vary their stiffness continuously and grasp objects at different locations along the arm.
To locomote and manipulate animals need to integrate sensory-motor information and couple it to their body dynamics. 24 The control architecture of such biological systems can be seen as composed of several layers arranged ‘top–down’ passing from a level of mental (conscious/brain) control, induced intentionally, to a level of sensory-motor control, induced perceptually. The biological question that had been posed previously, ‘how can animals generate behaviours’, has now been changed to ‘how can they do it smartly’. That is, if neuronal networks are not considered hard wired such animals should be able to reconfigure to produce different outputs under varying input conditions. 25 It has been found that the computational capacity of the network, not the specific properties, influences the emergence of network properties and is self-organized or selected by evolutionary pressure.6,12 In the next subsections, we will first briefly review the latest key findings on octopus anatomy and neurophysiology relevant to the research reported in this work.
Octopus arm anatomy
The octopus is a boneless animal and its dexterity relies on a muscular structure that can be seen as a ‘dynamic skeleton’. 26 Where muscles not only generate the forces required to implement movements, but also provide mechanical support. On a morphological level, the octopus arm section decreases from the base (the point nearest the octopus head) to the tip. Furthermore, the octopus has a number of suckers located along the ventral side of the arm used for sensing and in grasping tasks. On an anatomical level, the octopus arm has three main types of muscles: longitudinal (axial), transverse (radial) and oblique (helically wound) muscle fibres. The longitudinal and transverse muscles are arranged into four groups and controlled by a central axial nerve cord running from the base to the tip of arm as depicted in Figure 1.

Schematic view of the octopus arm anatomy. The arm has four groups of longitudinal muscles (L) and transverse muscles (T) surrounded by oblique muscles (O). The axial nerve cord composed of nerve cell ganglia (N) and axonal tract (AT) passes through the central axis.
The octopus arm muscular system is constant in volume, that is, a change in longitudinal dimension will result in an opposite change in the radial dimension and vice versa. Natural organs exhibiting such a property are termed ‘muscular hydrostats’. 26 These natural structures have great flexibility and potentially give rise to novel and interesting design concepts and actuation mechanisms.
Octopus nervous system
The octopus nervous system has to control a complex arrangement of muscles that is mathematically a system with an infinite number of DOF and mechanically a fully continuum structure. To control such a system, the octopus control architecture is organized hierarchically consisting of two main levels: a high-level control element comprised of the central nervous system (CNS) that sends global parameters to a low-level controller at its peripheral nervous system (PNS) to control the arms locally (Figure 2). This high-level controller triggers motions and sets the starting movement kinematic parameters, while the low-level controller assumes part of the individual arm muscle control functions and is largely autonomous. This distributed control strategy, and highly autonomous low-level controller, is based on a PNS containing roughly two-thirds of the neurons of the animal’s nervous system.27,28 Therefore, the traditional division of sensory-motor control into high-level (behavioural) and low-level (sensors, actuators) control ought to be seen as a unified neuro-computational entity.
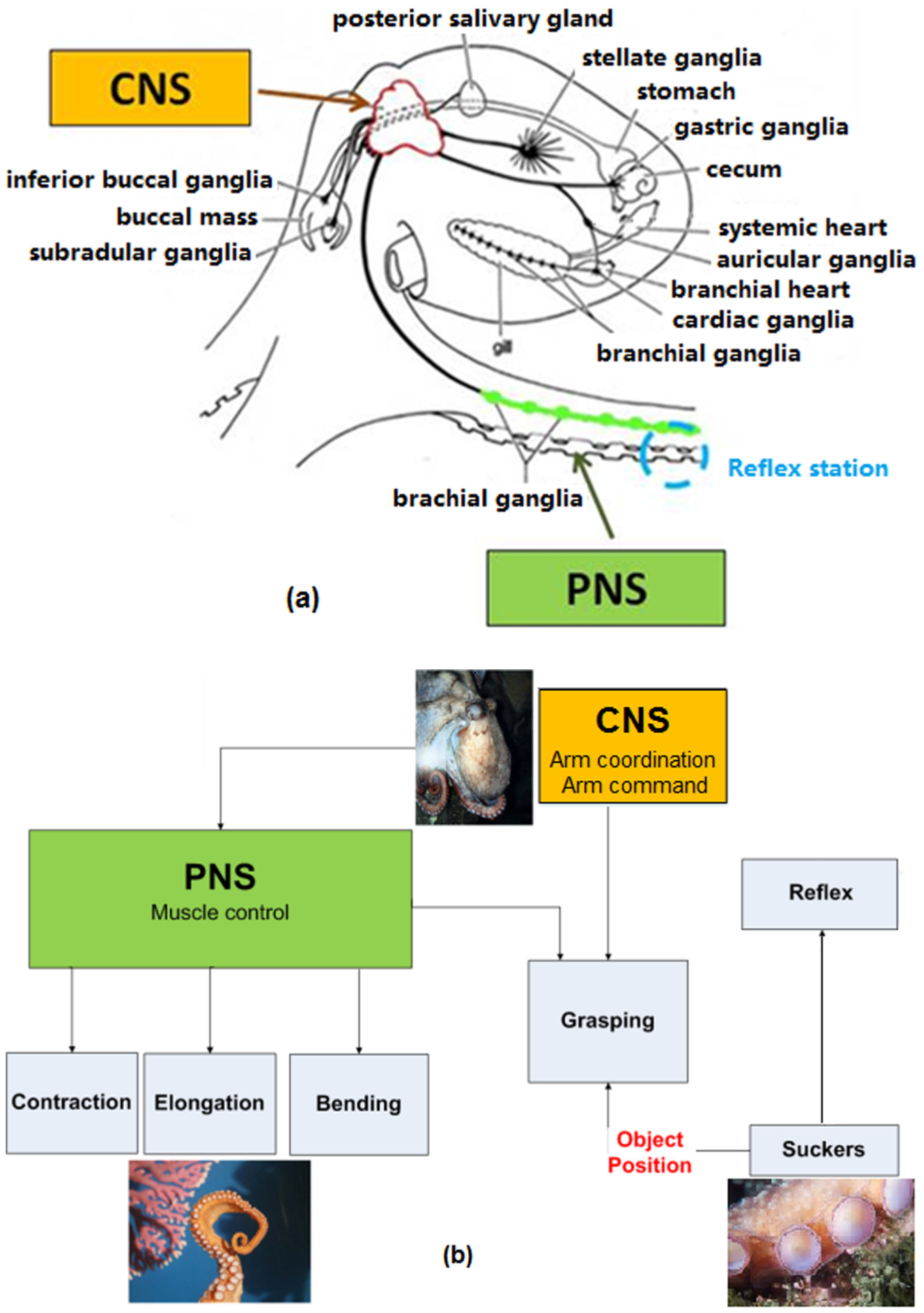
Octopus nervous system and motor control organization. (a) Drawing of an Octopus central and peripheral nervous system (respectively CNS, outlined in red, and PNS of the arms, outlined in green) and localization of the sucker reflex station (dashed blue circle) in respect to the mantle visceral mass. The PNS, located in each of the arms, has a higher number of neurons than the CNS, located in the head. (b) Schema of the octopus motor control. The CNS triggers motions, may set the strength for muscle contraction and coordinate arm movements. Then, the PNS apply commands to the appropriate muscular groups to produce movements such as arm contraction and elongation. Reflex control is a lower level of control and is mainly related to local sucker reflex along the arms. Some motions may not need a direct participation of the CNS, but are based on specific lower level sensory-motor integration process activated in response to the environmental stimuli. Some other movements (such as the grasping and bringing to the mouth action here referred to as ‘grasping’) require the co-activation of the central, peripheral and the arm reflex stations. The reflex station carries information about the object position along the arm. Through this co-activation of control levels the arm is provided with the right configuration to perform the action.
The octopus performs simple motions (such as bending, elongation and contraction) or complex motions (such as reaching, fetching and crawling) through the combination of basic stereotyped arm and body motions.10,29 For example, the reaching motion is performed by producing an initial bend of the arm followed by a stiffening wave that propagates along the arm to reach a target (Figure 3). Researchers have investigated this behaviour by directly extracting the muscle contraction patterns from live octopus and externally applying these patterns to several octopus arm models.30–32 It was then observed that the body dynamics may be used to control the arm’s motion in a closed-loop manner by embedding nonlinear limit cycles. 8 However, the final step of bridging the gap between these findings and a robotic application was missing in previous works.
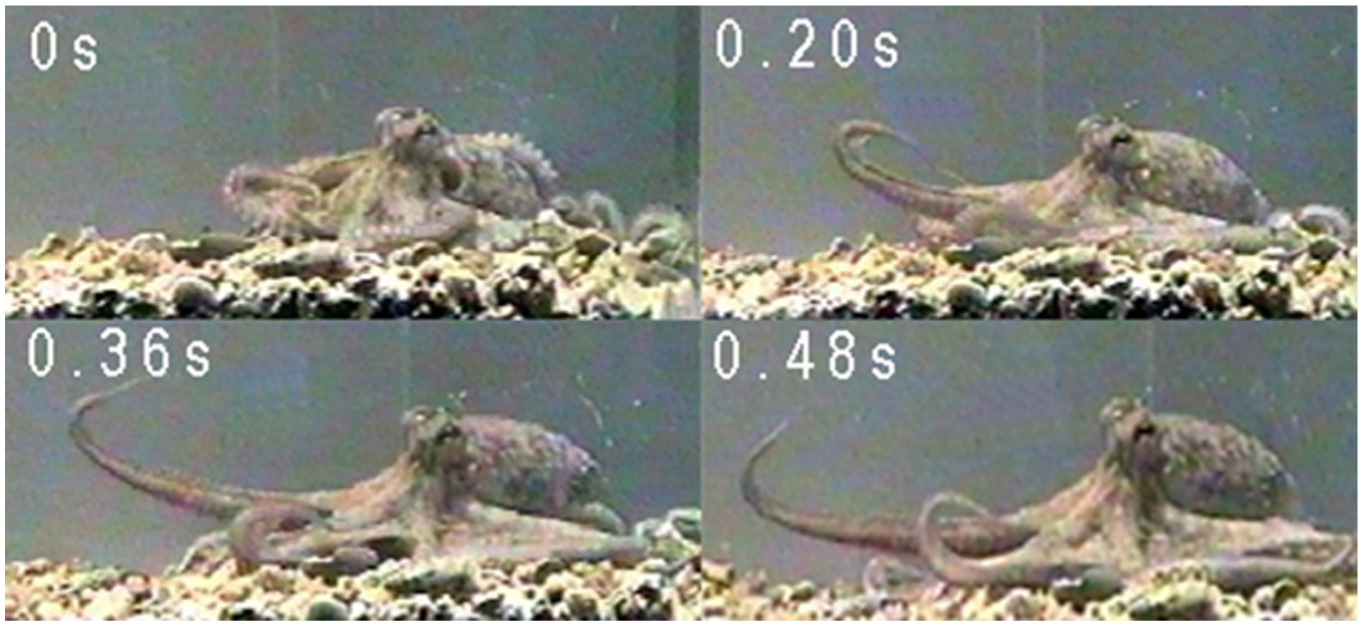
Octopus reaching motion. A bend is propagated from the arm base to the tip by means of stiffening and contraction of relevant longitudinal and transverse muscles in sequence. 10
Embodied design requirements
Starting from the biological insights presented above, this section studies the possibility of building an embodied robotic arm where mechanical and control systems must be co-designed to effectively work together as in an embodied animal. First, we discuss the concepts of biological replication and inspiration to figure out what biological features we are really interested in when designing an engineering prototype. Then, we define the embodied design requirements from the mechanical and control viewpoints.
Biological replication versus biological inspiration
A fundamental question has always puzzled the robotic designers: ‘how similar should a bio-inspired robot be to its original biological system?’ The ideal solution is to replicate as much as possible from the original biological system, including morphologies, structures and mechanisms, to achieve desired functions. This is called ‘biological replication’. However, biological replication requires full understanding of a biological system, which is extremely difficult in many cases. Also, biological replication is highly limited by real-life technologies due to engineering constraints of weight, size, efficiency and so on. There are additional intrinsic evolutionary constraints of biological systems in that they often do not represent the ‘best’ possible solution, but the best ‘compromise’ within the animal’s specific environment. As an alternative solution, ‘biological inspiration’ means getting insights from nature and trading them off with available technologies and other constraints or specifications to produce engineered systems. In this case, robotic designers put more emphasis on functional replication (emulation) rather than structural replication of a biological system.
Taking inspiration from an octopus, the most attractive features that could be useful in a robotic arm include its continuum shape, compliant structure and evolved stereotyped motions with hyper-redundant DOF such as elongation, shortening, reaching and grasping. The main goal of this research is therefore to find a reasonable way to transfer these features into a physical soft robotic arm, while respecting engineering constraints (e.g. the weight, size and dynamics of the actuators used to provide motion).
Mechanical requirements
Mechanical design of an octopus-like robotic arm requires the combination of softness and stiffness in actuators, materials and their bio-inspired arrangement. Some of the best known actuation techniques for soft robotics include cable-driven mechanisms, 33 electro-active polymers (EAPs), 34 shape memory alloys (SMAs) 35 and pneumatic muscle actuators (PMAs).15,16,36 By evaluating the mechanical performance of these actuation technologies (Table 1), we identified PMAs as a suitable actuation technology for our robotic arm as they meet design requirements for high power/weight ratio, fast dynamics, stiffness modulation and the ability to create and sustain both tensile and compressive forces.37,38 Such actuators, also known as McKibben muscles, are composed of a braided yet flexible outer sheath and an inner containment layer typically made from rubber or elastomeric material.37,38 By setting the initial mesh angle of the outer sheath greater or less than 55°, the PMAs can be designed to either extend or contract, respectively, when pressurized. 5
Comparison of compliant actuators.

The topology of the actuators should be inspired by the muscular anatomy of the octopus and their number chosen as a trade-off between required dexterity and engineering constraints.22,39,40 In engineering prototypes, either three or four longitudinal muscles could be applied to achieve the same motions. However, the use of four longitudinal muscles in an engineered octopus arm is kinematically redundant. Additionally, the transverse muscles in an octopus arm provide co-contraction to work antagonistically with the longitudinal muscles as the biological muscles can actively only contract and take tensile loads, that is, there is only one degree-of-stiffness (DOS) along the biological muscles. However, many engineering actuators (e.g. PMAs) are capable of creating both tension and compression during movements. Using such 2-DOS actuators, the transverse muscles found in nature can be removed from the robotic arm to reduce weight and size, yet the additional functionality of the PMA means that the same stereotyped motions characteristic of the octopus can still be achieved.
Control requirements
Due to the deformable structure, the computational difficulty of measuring and controlling a large number of DOF and high degree of nonlinearity, the development of control algorithms for continuum robots is challenging. Traditional control methods such as the inverse kinematics, 41 sliding mode and impedance control 42 and the artificial potential function method 43 have been applied to continuum arms previously. However, these schemes often require an exact kinematic/dynamic model of the robot and individual feedback control for each actuated DOF. In a continuum robotic system, the large number of feedback elements, that is, the control processors, sensors and so on, would greatly increase the computational complexity and cause design and operational issues.
To minimize the number of the feedback signals that would make real-time implementation too demanding an embodied approach, looking at how nature has solved the problem of controlling the octopus arm, is a key to addressing control of the prototype.40,44 In our study, the control architecture is inspired by the structure of octopus nervous system composed of CNS and PNS, to accomplish control tasks (e.g. path generation, motion switching and actuator driving) at different levels. At the same time, the soft body of the robotic arm is considered as part of the control loop, to passively produce compliant interactions against the environments, without the involvement of CNS or PNS. Although this is not fully (biologically and neurologically) representative of how an octopus controls its movements, we provide, from an engineering standpoint, a possible way to implement octopus-like motions in continuum robots with both reliable and computationally light control strategies.
Kinematic and dynamic model of a continuum arm
There have been several attempts to kinematically or dynamically model continuum arms.45–47 Here, we present a general-purpose model whose movements are considered as a function of muscle activations and external forces from the environment. This model will be used to investigate how the arm’s body dynamics, together with the PNS, embeds the motion patterns according to the initiation commands sent by the CNS.
First, we divide a continuum arm into multiple segments. The geometry of a single segment is shown in Figure 4(a). Two Cartesian coordinate systems A(x,y,z) and B(u,v,w) are attached to the centroids of the base and the moving platform, respectively. Four longitudinal muscles,

where

Geometry of (a) a single segment composed of a fixed base, a moving platform, a central strut and four longitudinal and transverse muscles, (b) a single arm model composed of multiple segments and (c) an octopus-like 3D model composed of eight arms and central body structure.
An Euler matrix,

where
According to equations (1) and (2), the muscle length Li is obtained by the dot product of

To mimic the continuum shape of an octopus arm, a number of segments are connected serially (Figure 4(b)). A homogeneous matrix j−1
The dynamics of the continuum arm is solved using the Newton–Euler method. The longitudinal muscles are considered equivalent to the mass-spring-damper systems, while the base and moving platforms are considered as rigid bodies. The spring stiffness used in the model can vary according to the strength of muscle activation, which is similar to biological muscles.49,50 A biological continuum structure is isovolumetric due to the muscular hydrostat in which an increase in length will result in a corresponding reduction in cross-sectional area and vice versa. In this model, a pair of artificial internal forces is applied to the longitudinal and transverse muscles to guarantee the volume of each segment remains constant. Hydrodynamic forces, including buoyancy and water drag, are also considered in the model for use in underwater environments. These forces are acting on the centre of the moving platform of each segment as external forces.
The detailed kinematics and dynamics of the model were reported by Kang et al. 48 The model is intrinsically nonlinear due to its kinematics, that is, the relationship between the muscle length and the moving platform posture (including position and orientation) in each segment (Figure 4(a)). Also, the computation of the isovolumetric forces and hydrodynamic forces introduces nonlinearities. These are usually undesirable from the viewpoint of classical control theory, however, in such a complex body they could potentially be exploited as part of a computational device, if appropriate inputs and outputs are defined, as is subsequently explained.
Embodied control
In this section, we discuss the possibility of applying the biological findings of octopus neurophysiology to a soft robotic arm to achieve the embodied control which is distributed into two levels, similar to the CNS/PNS architecture presented in an octopus’ nervous system.
High-level control
Animal behaviours are generated by the dynamic couplings between the brain, the body and the environment.6,25 Animals’ body morphologies and nervous systems are considered evolved to behave efficiently and survive in the animals’ respective ecological niches. 51 For example, the octopus nervous system consists of a relatively small CNS located in the brain (about 50 million neurons), and a highly distributed and massive PNS that operates throughout the body (about 300 million neurons). 51 These specific distributions of the nervous system are also thought to have evolved to behave adaptively in the interactions between the environment and the body. In particular, it is reported that in the octopus, motor programmes (such as the bend propagation) are directly embedded into the PNS, so that the CNS does not have to control the muscles one by one. 52 This suggests that some of the octopus behaviours, which were supposed to be initiated or switched by the CNS, have been embedded into the PNS according to the information provided by vision and chemo/tactile perception and, probably only to a little extent, by proprioception. 53
To achieve this timing-based autonomous control in robots, it is desirable for the central control network to have a memory capacity that can recognize the duration of time, which is a property that can uphold the information of the previous inputs within the current states. If the network has this property, it autonomously switches the motor commands with appropriate timing, even if no clue for switching the behaviour has been provided externally from the sensory inputs. We have realized this control scheme using a reservoir computing approach54,55 in which the reservoir consists of an artificial recurrent neural network called the echo state network. 56 Research on the octopus learning and memory centres (the vertical lobe system) has proved the existence of recurrence in the octopus CNS51,57 (Figure 5). It has been shown that the timing-based control can be successfully implemented using the reservoir computing approach for the reaching task on the dynamic model of soft robotic arms presented in section ‘Kinematic and dynamic model of a continuum arm’ and for the behaviour switching tasks on the physical soft robotic arms.58,59

Sensory inputs and a recurrence in the octopus vertical lobe systems (VL) and the median superior frontal lobe (MSF). MSF neurons innervate the VL via the MSF tract, as are the amacrine cells synapse onto the large efferent cells. Sensory inputs reach behaviour circuitry via two pathways and exhibit recurrence. The numbers in the figure show the number of cells for each cell type. 51
Furthermore, we have shown that the dynamics of the octopus body itself can be used as a computational resource. It is well known that the muscle organization of the octopus has a characteristic feature called the muscular hydrostat, which governs the complex and diverse motions of the arm. Using this body dynamics as a resource, we have shown that it is possible to emulate complex nonlinear dynamic systems8,9 and to embed the closed-loop control into the arm 8 based on the reservoir computing approach.54,55 It has been established that to have computational capabilities, a reservoir should have the properties of input separability and fading memory. 54 Input separability, the ability to make the inputs classifiable into the separate groups, is achieved by a nonlinear mapping of the low-dimensional input to a high-dimensional state space. Fading memory is a property to uphold the influence of a recent input sequence within the system that permits integration of stimulus information over time. This guarantees reproducible computation for which the recent history of the signal is important. If the dynamics involve enough nonlinearity and memory emulating complex, nonlinear dynamical systems only require adding a linear, static readout from the high-dimensional state space of the reservoir. Our results have clearly proved that the complex dynamics originating from the muscular-hydrostat structure can be used as a successful reservoir. 8 Recently, this has also been demonstrated using a physical platform equipped with a soft silicone arm. 60 These results suggest that a computational load that is usually handled by the external controller can be largely outsourced to the soft body itself. This approach may shed light on the mechanisms that enable motor programmes to be embedded into the octopus arm through the support of the PNS.
Low-level control
Low-level control is implemented in the PNS by taking CNS command outputs and breaking them into individual time-based coordination muscle commands. While the number of possible motions is infinite, some primitive motions for elongation/contraction, bending and reaching have been identified by matching the classical repertoire of what an Octopus vulgaris can do with what would be beneficial to a robotic manipulator.10,61 The respective control features of these primitive motions have been included into the PNS, 44 and Table 2 gives a summary of the resulting primitive motion outputs from the PNS used to drive the longitudinal and transverse muscles.
Resulting PNS stereotyped muscle structures for given commands.

Elongation is achieved by simultaneously contracting the transverse muscles and relaxing the longitudinal ones (or only the elongating longitudinal muscles if transverse muscles are not present). In this case, as the radial diameter is reduced, the arm length will increase to maintain muscular hydrostatic (constant volume) properties. Bending is achieved by selective muscle activation, that is, contraction, of one or more of the longitudinal muscles and co-contraction of the transverse muscles in segments above and below the required bend point. If transverse muscles are not present, only longitudinal muscles are selectively activated.
More complex motions can be produced as a combination of primitive motions from the selection given in the table. For instance, fetching is the motion by which the octopus retrieves an object to its mouth.29,30 This motion is triggered by the suckers and results in an articulated arm action containing both elongation/contraction and bend sections. Figure 6 presents the simulated results for bending, reaching and fetching by applying a series of CNS commands to the presented arm model through PNS. This bio-inspired control is implemented without the need for mathematically complex or computationally heavy model-based algorithms that are difficult to treat and implement in real time.

Sequence of commands sent by CNS to single arm through PNS: (a) bend to starting position, (b) use reaching command to extend arm and (c) fetching motion. The hydrodynamic forces slowed down the movement of the arm tip and generated the whipping effect commonly seen in live octopus. 44
Robot control implementation
The presented control architecture has been physically integrated into a robotic system.22,35 The CNS is implemented on a host computer (PC104) and the PNS on a digital signal processing (DSP)-based (Texas Instruments TMS320F288, 32-bit) flexible control board customized for the arm prototype. Figure 7 shows the board block diagram for the control hardware. The CNS communicates with the PNS through an RS232 serial link. The PNS algorithm runs on the DSP and converts CNS outputs to time-based individual actuation commands for the robotic actuators. The PNS board is designed and fabricated to be compliant (flexible printed circuit board (PCB)), which is useful if the board is mounted on the soft arm itself. A motion capture system, VICON®, is used to visually track the position of the continuum arm in three-dimensional space.

Block diagram of the control hardware. The control system is physically composed of two control levels, CNS and PNS, with proprioceptive feedbacks which provide information to the CNS about the muscle length and velocity.
Soft robot arm prototype
In this section, we will investigate whether a soft robotic arm could embed biologically inspired and plausible behaviours such as elongation, bending, reaching and grasping. As discussed in section ‘Embodied design requirements’, this will require an analysis of the critical real octopus actions, combined with compromises to match engineering trade-offs arising both from technology limitations and the capability of the technology to generate actions beyond the capacity of the biological system.
It is well known that the biological muscles can only contract and provide tension while they cannot actively extend and support compressive loads. Hence, a real octopus has to use its muscular-hydrostat structure and contract its transverse muscles to achieve extending motion. However, the PMAs used in our robot are capable of generating both tension and compression when extending. Using such actuators the transverse muscles can be removed from the robotic continuum arm, yet the same functional motions can still be achieved. It is also noticed that an octopus can contract their transverse muscles to reduce its radial dimension, which will help it to pass through narrow space. In prior work, the authors have developed and reported a version of a robotic soft arm prototype with transverse muscles to implement this feature. 40 However, they found that the use of transverse muscles in a robotic arm greatly increases its size and weight. When the transverse muscles are fully contracted, the minimum radius of the robotic arm is still larger than that without transverse muscles. Hence, although biologically closer to the real octopus, we decide not to implement the transverse muscles in the final version of the robotic arm reported in this article.
In a real octopus arm, the twist motion is achieved using oblique muscles that diagonally surround the arm. PMAs mounted obliquely produce a similar effect; however, it is very difficult to mount such muscles in a robotic arm due to the limited space causing interference with the longitudinal muscle. 62 An alternative solution is to mount the robotic arm on a rotary base platform as reported in McMahan et al. 16 In our study, we focus on the demonstration of bending, reaching and grasping motions. The twist motion is not considered as a key feature at this moment. However, this can be developed in future work if such actions become more critical to the robot functionality.
Based on the above consideration, a soft robotic arm was designed and constructed that is 670 mm in length and composed of six serially stacked modules (Figure 8(a)). Each module is supported and actuated by four identical PMAs arranged in parallel whose initial length is 100 mm. A pneumatic regulator (SMC, ITV2030) is used to tune the supply pressure ranging from 0 to 5 bar, and the maximum strain is approximately 35%. The module is covered by a nylon braided sleeve that constrains the individual PMAs and allows for longitudinal motion and bending. More detailed information of robot design method can be found in the study by Kang et al. 22

Reaching motion: (a) prototype dynamics and (b) tangential velocity profiles.
The use of six modules provides this prototype with more DOFs than in previous versions allowing it to perform a wider range of manipulations including the reaching motion shown in Figure 8(a). Similar to the biological octopus, the reaching motion is obtained by propagating a local bend along the arm towards the tip. The motion duration is around 3 s for the robot prototype, while it is around 0.48 s for the live octopus arm as shown in Figure 3. This is currently due to the dynamic limitations of the PMAs and controller responses and will be enhanced in future generations. Biologists have proposed to use a tangential velocity profile to characterize the reaching motion which indicates the propagating velocity of the bend point. 30 Figure 8(b) presents the tangential velocity profiles obtained from the live octopus arm (shown in Figure 3), presented arm model and robot prototype. To compare them in the same scale, the velocity and time are normalized with respect to their maximum values. It can be seen that both the simulated arm and prototype are able to reproduce similar motion profiles to that of a live octopus arm.
Whole arm grasping is another stereotyped motion used by continuum arms to hold objects. Although the prototype lacks the suckers present in real octopus arms, it is able to use the soft body structure to compliantly interact with a ball by generating a bend along the whole arm that provides sufficient friction for holding (Figure 9). As there are no contracting PMAs in the robot, the grasping motion is achieved by extending and stiffening the PMAs (indicated with the dashed yellow lines in Figure 9) on the side away from the object instead of the side the object is in contact with. This is different from the real octopus arm, but provides the same effect.
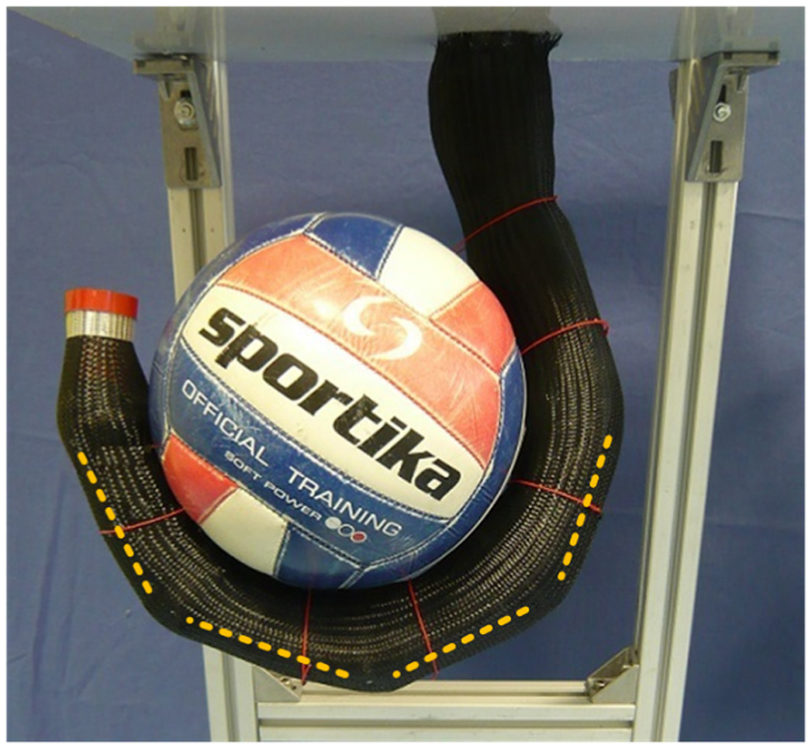
The arm prototype is grasping a ball. The activated PMAs are indicated with the dashed yellow lines.
Conclusion
Octopuses exploit their soft body structures to locomote and manipulate in complex environments. The amazing motion abilities of octopuses have inspired robotic designers to endow robots with a new form of intelligence, the embodied intelligence, that allows for diverse motion patterns generated by the close co-operation of mechanical structures, control systems and environments.
After providing the relevant biological background, the embodiment design requirements for soft robotic arms were defined, where bio-inspiration and engineering constraints were appropriately blended. A kinematic and dynamic model for soft robotic arms with muscular-hydrostat properties was presented to investigate the dynamic interactions between the controller, body morphology and external environments. The hierarchical and distributed control strategies inspired by the octopus nervous system were developed to manage the hyper-redundant DOF of the soft arm. A reservoir computing approach based on the recurrent neural networks was implemented and validated on the presented dynamic model. A pneumatically actuated continuum arm whose design captures the key features of octopus anatomy and control was constructed to arrive at an engineering and biological design equilibrium.
The main limitation of building soft continuum robots comes from two aspects: (1) the development of highly compact and compliant actuators with a high power/weight ratio and (2) the development of reliable and efficient control methods to manage the hyper-redundant DOF and body deformation. Although there are gaps between the robotic and biological continuum arms at present, such soft continuum robots show potential for applications that range from search and rescue in narrow or hostile environments to minimally invasive surgery.
Footnotes
Acknowledgements
The authors thank K. Nakajima from Kyoto University for providing suggestions on the embodied control.
Academic Editor: Jianyong Yao
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was supported, in part, by the Natural Science Foundation of China (Nos 51375329 and 51290293) and Tianjin Municipal Science and Technology Department Program (No. 13JCZDJC26400). Financial support from the European Commission in the ICT-FET OCTOPUS Integrated Project, under grant agreement No. 231608 is also acknowledged.