
Abstract
In this article, we propose a novel discrete-time iterative learning control framework for robust path-tracking problem of nonholonomic mobile robots. The contributions of this iterative learning control framework are threefolds: (1) With the application of a conventional feedback-aided P-type learning algorithm, the tracking error caused by a nonzero initial shift is detected. (2) By the introduction of an initial rectifying term, a novel iterative learning control scheme is proposed to improve the tracking performance. Sufficient conditions of convergence of this approach are given. (3) The convergence of the proposed algorithm for achieving the desired trajectory over a specified interval is proven theoretically. Simulation results validate the effectiveness of the proposed scheme.
Introduction
As a hot field of intelligent control, iterative learning control (ILC) has been developed for nearly three decades, since the concept was first published by Arimoto in English in 1984. 1 ILC is a control methodology that performs a given objective system repeatedly to track a reference trajectory over finite time intervals. The prime idea of ILC is to refine the control input to make better operation performance of the system on the next trial by use of updated data on the previous trial. Thus, ILC is applicable to systems with repetitively operated dynamics, such as multiagent systems consensus tracking, 2 robot arms for manufacturing, 3 hard disk drive, 4 and traffic flow in consecutive sections of a freeway. 5 As a model-free control, ILC can be applied to systems with strong nonlinearity, unknown dynamics structure, or uncertain parameters. In this regard, ILC is fruitful both in theoretical analysis and practical applications. 6 –10
Widely utilized in civil and military fields, nonholonomic mobile robots (NMR) have gained significantly increasing research interests over the past few decades. The growing demands have brought in the focus on improving the autonomous motion of NMR. One strategy to motion control of mobile robots is to divide control between path planning and path tracking. Utilizing data from perception systems, path planning algorithms can be used to generate a desired path. 11 –13 Given a desired path, this article mainly investigates the tracking problem for NMR to follow the reference path autonomously.
With nonholonomic constraints, wheeled mobile robot is one of the well-known time-varying, coupling and complex nonlinear systems. Thus, the motion control of mobile robot gained increasing attention, and various novel controller design schemes have been developed, such as feedback control, 14,15 backstepping approach, 16,17 sliding mode control, 18 –20 fuzzy control, 21,22 and ILC methodology. In terms of nonlinear feedback control, it is necessarily based on exact mathematical model which is hard to obtain in practice. Combined with adaptive and robust control, backstepping approach can be used to systems that contain unknown parameters and disturbance. However, backstepping approach has the computation expansion problem. As a variable structure control method, sliding mode control is robust to modeling inaccuracy as well as disturbances, whereas its chattering limitation strongly reduces the control performance. Although no need of exact modeling, fuzzy control suffers from the slow response time due to the heavy computation. On the other hand, many ILC schemes have been applied to motion control of the robot systems. 23 –28 For example, iterative learning path-tracking control worked on omnidirectional vehicle robot which, whereas, is not subject to the nonholonomic constraints. 24,25 Oriolo et al. 26 presented an ILC method for robust steering of chained-form linear time-varying car-like mobile robot. The seminal work of Kang et al. 23 introduced a robust iterative learning rule with predictive and current learning terms for a two-wheeled mobile robot. Given the discrete kinematic model, Xi et al. 28 developed an ILC technique with an adjustable parameter and applied it to a four-wheeled mobile robot. Yu et al. 27 designed an ILC law with predictive, current, and past learning items to solve the high-precision trajectory-tracking issue of a wheeled mobile robot.
It should be pointed that most of these proposed schemes are considered with the assumption that the system is reinitialized to the neighborhood of the desired initial condition at each iteration. However, it is practically impossible to set the initial state value of the plant to that of the desired trajectory exactly. Besides, the accumulation of the initial state error may lead to poor tracking performance. In view of this challenge, this article proposes an improved ILC methodology for nonholonomic nonlinear systems in the presence of initial shift. By the term initial shift, we mean the initial condition remains the same for each trial, shifting form the desired initial condition. As an extension of the basic learning strategy used in the study by Kang et al., 23 an initial rectifying term is added to form learning algorithm. Therefore, the proposed update law adopts feedback-aided P-type ILC to help the tracking error to converge to zero quickly and exploits the initial rectifying strategy to achieve complete tracking with smooth transient. Moreover, conditions on convergence are established. Finally, the effectiveness of our proposed algorithm is demonstrated with simulation studies.
The remainder of this article is organized as follows: In the second section, we present the mobile robot model and the formulation of tracking problem. With established tracking properties, a new scheme is proposed to design an appropriate ILC update law in the third section. Convergence is also analyzed. Simulation results are given in the fourth section, and the fifth section concludes this work.
Robot model and problem formulation
In this article, the following notations and definitions are introduced. The equation

which is equivalent to the ∞-norm defined as
Consider a two-wheeled mobile robot located on a global Cartesian coordinate system O − xy as shown in Figure 1. The robot which is represented as P(k) possesses three degrees of freedom. The representation of its positioning can be denoted as


A two-wheeled nonholonomic mobile robot.
where ΔT is the sampling time. With regard to nonholonomic constraints, we assume that there is no sliding between the tire and the road.
As Figure 2 illustrated, the mobile robot dynamics inevitable exists some random uncertainties and disturbances, so we assume these influences as system state disturbances. Let



The kinematic path-tracking control scheme using ILC for nonholonomic mobile robot. ILC: iterative learning control.
where i denotes the number of trial cycle and k is the time index ranging from 0 to n to complete a cycle. For

Remark 1
In this article, we use different fonts to distinguish the mobile robot output trajectory
In this article, we consider the case that there exists an initial shift between the initial condition and the desired one and the resetting might not be exact. Therefore, our control objective is to propose a robust ILC algorithm, so that the NMR output trajectory
Assumption 1
Suppose the uncertainties


Assumption 2
The matrix function B(q,k) is globally uniformly Lipschitz with respect to q on N, that is

for positive Lipschitz constant cB.
Assumption 3
The matrix
Assumption 4
For
Assumption 5
All operations start at a biased initial state
Controller design and convergence analysis
A conventional learning algorithm for NMR tracking problem takes the form of 23

where

Now, we provide the following theorem without proof.
Theorem 1
If assumptions (A1) to (A5) are satisfied for NMR systems (2) and (3), and the updating law (7) be applied. Assume (8) holds for all

In the presence of disturbances and noises, the system output will converge to
The above theorem indicates that the output trajectory converged to

where

and
Theorem 2
Consider assumptions (A1) to (A5) hold for systems (2) and (3) and the ILC updating law (10) is applied. If (8) is satisfied, given a bounded output sequence

On the other hand, in the presence of disturbances and noise,
Proof
Clearly, for an initial state


where

Taking the function norm of (15), we have

Let

from which we arrive at the following equation

On the other hand, from (10) we get

Applying assumptions 2–5 to (19), it follows that

Let

Multiply (21) by

Taking
Let

where

and

Choose α large enough so that

Similarly, multiplying both sides of (18) by

Next, subtracting (14) from (3) yields

Multiplying both sides of (27) by

Hence, from the inequalities (25), (26), and (28), we can conclude that
As
Simulation results
In this section, simulation studies are presented to verify the obtained theoretical results via MATLAB Simulink platform. We have run three simulations with different kinds of trajectories as the desired paths. For comparison, tracking performance of learning algorithm (7) are also demonstrated in all simulations. Define the absolute value of maximum tracking errors in i-th iteration as
Case 1: circular trajectory
In this case, we mainly discuss a circular expected trajectory whose initial condition is

Figures 3 to 5 show simulation results for 100 iterations using the learning scheme (10) with Q = 0.003 and the conventional updating law (7).

Simulation results of the change of mobile robot trajectory in the iterative process by using the ILC law (10). ILC: iterative learning control.

Simulation results of the change of mobile robot trajectory in the iterative process by using the ILC law (7). ILC: iterative learning control.

The convergence performance of the learning algorithm (10).
Case 2: cardioid-like trajectory
In this case, we mainly discuss a cardioid-like desired trajectory which is comprised of three semicircles. Starting from (1,0), the cardioid-like trajectory first rotates counterclockwise along a unit circle centered at the origin (0,0), then it rotates counterclockwise along a semicircle with center coordinates (1,0) and radius 2. Rotate counterclockwise continuously along a semicircle of radius 1 centered at (2,0), the cardioid-like trajectory finally terminates at (1,0). This desired trajectory is predefined for

Figures 6 to 8 show simulation results for 200 iterations using the learning scheme (10) with Q = 0.001 and the conventional updating law (7).

Simulation results of the change of mobile robot trajectory in the iterative process by using the ILC law (10). ILC: iterative learning control.

Simulation results of the change of mobile robot trajectory in the iterative process by using the ILC law (7). ILC: iterative learning control.
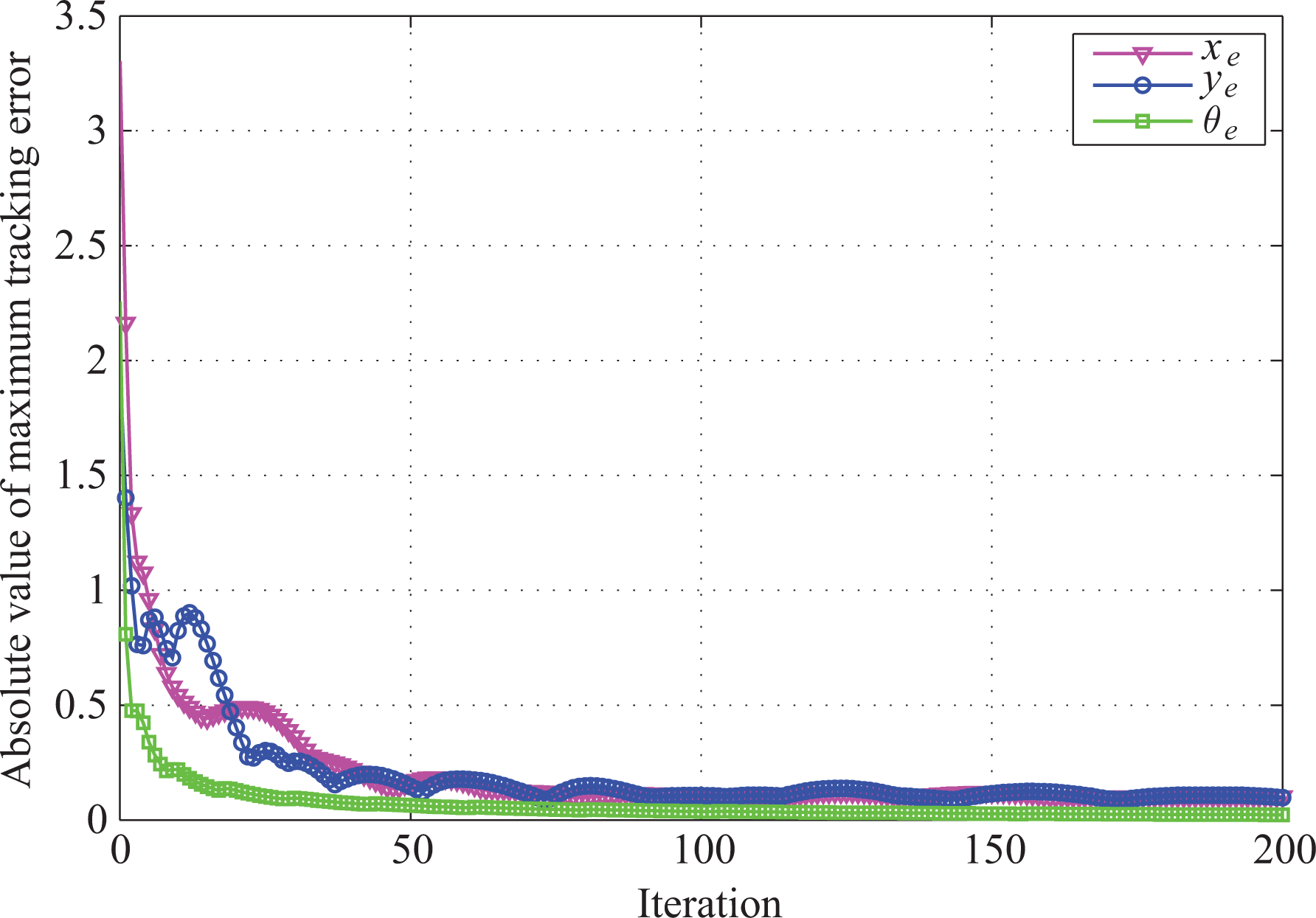
The convergence performance of the learning algorithm (10).
Case 3: spiral-like trajectory
In this case, we mainly discuss a spiral-like desired trajectory which is comprised of seven semicircles with different radiuses. Starting from (1,0), the spiral-like trajectory first rotates counterclockwise along a unit circle centered at the origin (0,0), then it rotates counterclockwise along a semicircle of radius 1.5 centered at (0.5, 0). Rotate counterclockwise continuously along a semicircle of radius 2 centered at the origin, the trajectory continues to rotate counterclockwise along a semicircle with center coordinates (0.5, 0) and radius 2.5. Such like this, the desired trajectory rotates counterclockwise along semicircles whose center coordinates change between (0,0) and (0.5, 0), and the radius of them grow at the pace of 0.5. Finally, the desired trajectory terminates at point (−4, 0). This desired trajectory is predefined for

Figures 9 to 11 show simulation results for 100 iterations using the learning scheme (10) with Q = 0.003 and the conventional updating law (7).

Simulation results of the change of mobile robot trajectory in the iterative process by using the ILC law (10). ILC: iterative learning control.

Simulation results of the change of mobile robot trajectory in the iterative process by using the ILC law (7). ILC: iterative learning control.

The convergence performance of the learning algorithm (10).
Conclusions
In this article, a novel practical ILC updating law is proposed to improve the path-tracking accuracy for NMR. Its main feature is its ability to track the desired trajectory with biased initial condition. Given the kinematic model of NMR, the proposed updating law exploits feedback-aided P-type learning terms to enhance stability as well as robustness characteristics. Furthermore, the initial rectifying term is introduced to guarantee the uniform convergence of the output trajectories to the desired one with a smooth transient. Numerical simulations are given to validate the obtained theoretical results.
Footnotes
Acknowledgements
The authors would like to thank the editors and anonymous referees for their constructive comments and suggestions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research is supported by the National Natural Science Foundation of China (61375084 and 61374101) and the Natural Science Foundation of Shandong Province (ZR2015QZ08).