
Abstract
A novel iterative learning control (ILC) for perspective dynamic system (PDS) is designed and illustrated in detail in this article to overcome the uncertainties in path tracking of mobile service robots. PDS, which transmits the motion information of mobile service robots to image planes (such as a camera), provides a good control theoretical framework to estimate the robot motion problem. The proposed ILC algorithm is applied in accordance with the observed motion information to increase the robustness of the system in path tracking. The convergence of the presented learning algorithm is derived as the number of iterations tends to infinity under a specified condition. Simulation results show that the designed framework performs efficiently and satisfies the requirements of trajectory precision for path tracking of mobile service robots.
Keywords
Introduction
With the rapid development of techniques for mobile service robots and the urgent demand from society, mobile service mobile robots have a wide range of applications in diverse areas. 1 However, such robots encounter various complex circumstances in path tracking, 2 such as iteration-varying initial position and desired trajectory. Rapid and accurate autonomous path tracking is essential for mobile service robots to complete intelligent services. Iterative learning control (ILC), which was first presented in English by Arimoto et al., 3 is one of the most effective ways to achieve it. Compared with other control methods, such as optimal control, 4,5 fuzzy control, 6,7 sliding-mode control, 8 and backstepping approach, 9,10 ILC can track desired trajectories more fully for repetitive systems via unknown models during a finite duration. 11 ILC can also effectively solve the problems existed in aforementioned control methods, such as heavy computation (fuzzy control), computation expansion (backstepping approach), and the requirement for an exact mathematical model (optimal control).
Many ILC schemes have been applied to control systems, however, related published investigations have mostly only required that a single variable (e.g. desired trajectory and initial position) is in iteration-varying mode during the entire whole control process. 12 –14 For iteration-varying desired trajectory, Saab et al. 15 proposed the D, PD, and PID-type ILC learning algorithms, and a bounded tracking error was guaranteed as a result of the presence of nonparametric system uncertainties; Chen and Moore 16 described the ideas on how to harness the nonrepetitiveness in a known or unknown repeating pattern; Zhang et al. 17 presented the observer-based ILC to track the nonidentical trajectory; and Jin 14 put forward hybrid adaptive ILC for nonuniform trajectory tracking. Xu et al. described adaptive ILC algorithms, 18 recursive direct learning control method, and internal model principle-based ILC 19 successively for nonrepetitive trajectory tracking. Chien 20 presented a combined adaptive law for the fuzzy ILC of nonlinear systems with varying control tasks. Some designed ILCs were aimed at tackling the problem of iteration-varying initial error. 21,22 The types of iterative learning controllers were presented to solve initial state errors. 21 Park 23 provided ideas on variable initial state errors via PD-type ILC. A conventional feedback-aided P-type ILC control was proposed by Zhao et al. 24 for path tracking of nonholonomic mobile robots against initial shifts.
ILC for path tracking of mobile service robots with multiple uncertainties, which hinders the applications of service robots in practice, has gained increasing attention in recent years. 25,26 To solve these obstacles, Li et al. 27 presented adaptive ILC law for a class of discrete-time systems with iteration-varying trajectory and random initial condition. Meng et al. 28 –30 also proposed adaptive discrete-time ILC for nonlinear multiple-input multiple-output systems with iteration-varying initial error and reference trajectory. Adaptive ILC and data-driven adaptive ILC were applied by Chi et al. 31,32 for a class of nonlinear discrete-time systems with random initial states and iteration-varying target trajectory. All of these works provided a theoretical foundation for solving the multiple uncertainties in path tracking of mobile service robots and applying such robots in practice.
Given the aforementioned conditions, the main objective of this study is to solve multiple uncertainties in path tracking of service robots using ILC algorithms. Unlike previous research, the current study uses a perspective dynamic system (PDS) to collect information about the mobile service robots. Moreover, the iteration-varying desired trajectory and initial error are allowed to be measurable apart from the system-state disturbances. As a result, the motion trajectory converges uniformly to the desired one after iteration.
The remainder of this article is organized in the following manner. In the second section, the background of PDS is briefly reviewed. The third section presents the problem formulation and the ILC design in detail. In the fourth section, the learning convergence is analyzed. In the fifth section, the simulation of path tracking of service robots is provided. Some conclusions and future works are provided in the sixth section.
Background
PDS is first introduced to better build the motion model of a service robot. The transformation apparent motion from 3D to 2D image plane through a camera and the result in the image plane are called PDS. It is a good control theoretical framework to estimate the motion problem. Ma et al. 33 combined PDS and ILC to solve the path-tracking problem under an identical desired trajectory, while ignoring the uncertainties existed in practice.
Several common definitions of PDS are available. 34,35 A general PDS is described as

where A and B can be obtained based on the projective observation function, which can be defined as follows

where
The structure of PDS in accordance with the aforementioned theories is shown in Figure 1. From this figure, a stationary camera a is used to observe the mobile service robot moving on a plane P. A path model of affine motion is obtianed on a plane L, in which the trajectory of the mobile service robot is shown on the plane L.

Illustration of PDS with single observation function. PDS: perspective dynamic system.
From equation (1), the PDS is expanded as

where it is assumed that
where
When the PDS is applied to estimate a moving object, a plant is considered moving along a 3D trajectory in 3D space whose motion is observed via a camera. However, the information collected in the image plane of the camera is 2D data. The overlap phenomenon easily occurs; thus, additional cameras should be added to collect data of the moving object from different directions, which lead to increased cost and effort. On the basis of the motion properties of the mobile service robot, no motion occurs in the vertical direction, and the robot can be considered moving on a plane. Preliminary results are generated for the case of 2D motion with a PDS in this article.
Problem formulation and iterative learning control design
To obtain the trajectory information of the mobile service robot, a PDS is applied. It is defined that a robot is moving along a 2D trajectory in 3D space whose motion is observed via a camera-type vision system. The information of the trajectory is collected in the image plane of the camera. The applied structure is shown in Figure 2.

A moving mobile service robot in 2D PDS. PDS: perspective dynamic system.
The PDS is constructed as follows

where
The desired trajectory differs from the previous one in each iteration, and it is defined as follows

where the subscript

where
Moreover, it is known that the initial position of mobile service robots is varying in practice. So, the initial shift should also be considered. In this article, it is supposed that
The output tracking error and initial error in the k’th repetitive operation are denoted as follows


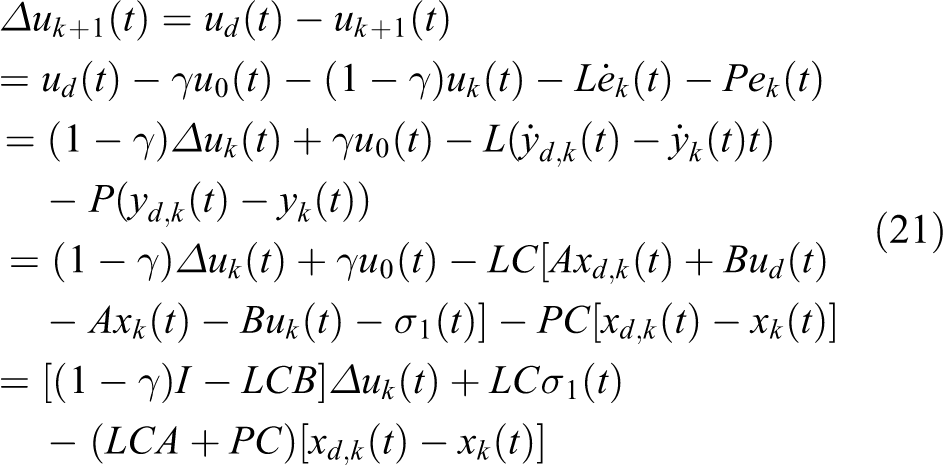
To solve the aforementioned problems, the following ILC algorithms are applied


where the subscript k is an iterative index,
The schematic of ILC can be simply described, as shown in Figure 3. It shows that the nonrepetitive factors are considered.

The introduced schematic of ILC with nonrepetitive factors. ILC: iterative learning control.
Analysis of convergence
Definition of norm
where
Analysis
Owing to the iteration-varying desired trajectory and initial value, a set of additional assumptions are considered. Each trajectory is considered for a fixed finite time Each desired trajectory Initial value Initial control input

where

then, it can be concluded that when
Proof
From equation (5), the solution of

And

Initial ILC law (10) and forgetting-type ILC (11) are available, and it yields

By integral subsection integration and it is expressed as follows

Substituting equation (16) into equation (15), it is calculated as follows

where Im
is an identity matrix of m dimensions. Taking norm and multiplying
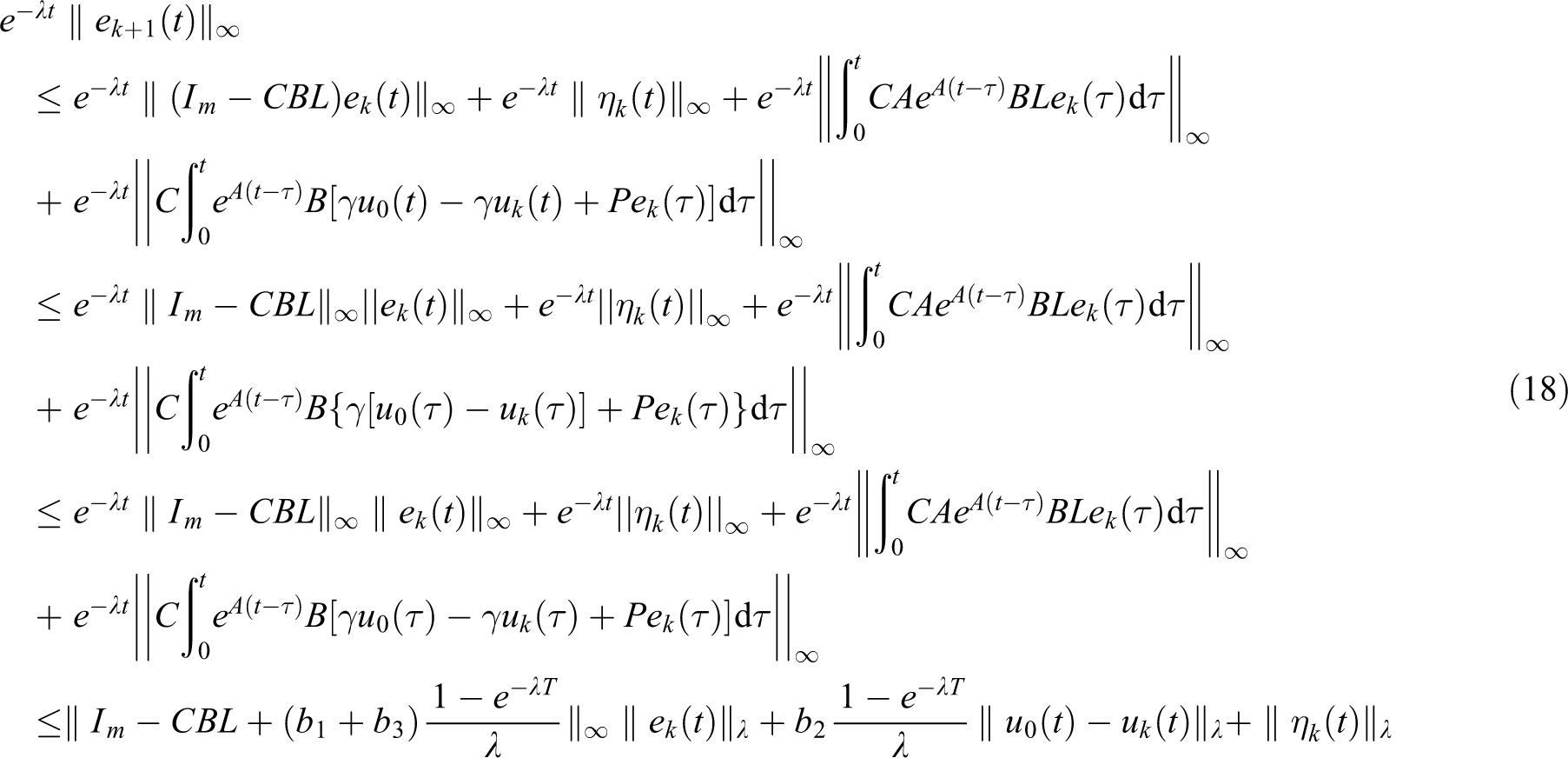
where
From equations (8
) to (11), it is known that

Similarly, it is seen that

It is known that
Therefore,

Multiplying

where

where
Taking λ sufficiently large, there exists a ς small enough satisfying

where N is a small limited positive constant. Taking a λ sufficiently large, the

If
To sum up, if
Example and simulation
Numerical simulation and physical simulation are presented to illustrate the designed scheme and verify the obtained theoretical results.
Numerical example
Based on equations (3) and (5), a 2D-PDS system is described when a mobile service robot moves along a plane

and the output is

where

where
The ILC with forgetting factor is applied as follows

where γ, L, and P are chosen as
The initial control input and initial value are given

P-type ILC law is applied to modify initial error

where
According to
Simulation results are shown in Figures 4 to 7.

(a, b) The tracking process under ILC law. ILC: iterative learning control.

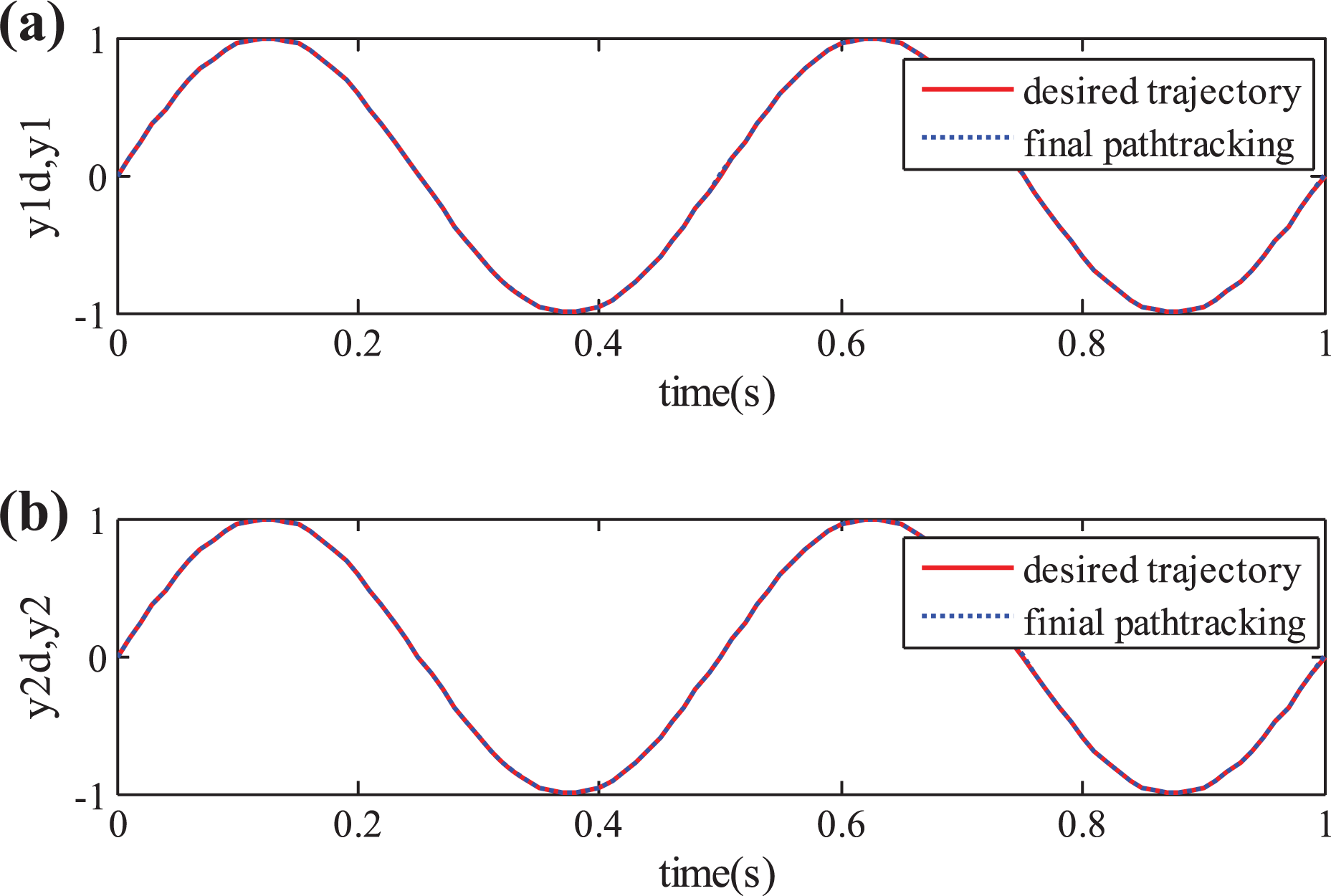
(a, b) The final position tracking under ILC law. ILC: iterative learning control.

(a, b) The disturbance value in time domain during path tracking.
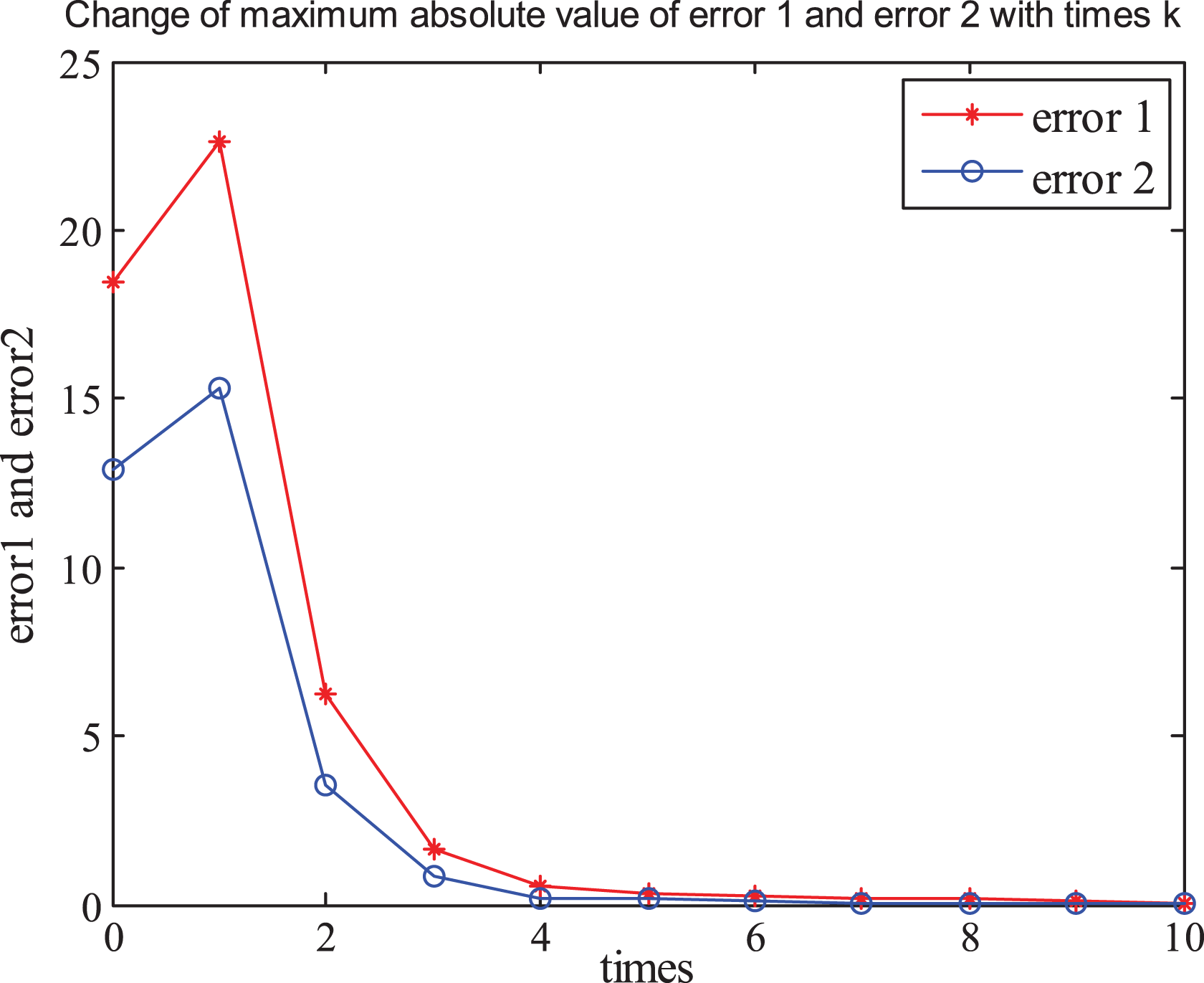
Change of maximum absolute values of error with iterations.
Figures 4 shows the tracking process under the presented ILC scheme, and Figures 5 shows that the trajectory
Comparison
To show the advantages of the proposed ILC in the nonrespective desired path tracking, a comparative simulation is designed, which supposes that the x axle has disturbance. While no error is noted in the y direction, the design is formulated as follows

The simulation results are shown in Figures 8 and 9. Evidently, the disturbance in the x axle is random, whereas that in the y axle is smooth, as shown in Figure 8. Moreover, they arrive at the desired trajectory after the iteration, as shown in Figure 9.

(a, b) The disturbance value during the path tracking.
(a, b) The final position tracking under ILC law. ILC: iterative learning control.
Therefore, the aforementioned results indicate that the PDS is to estimate the motion problem of the service robot efficiently, and the proposed ILC laws perform well in path tracking. Moreover, the initial shift is modified and they all arrive at the desired trajectory under the desired precision after iteration. Compared with feedback controller (such as PID), closed-loop compensation easily suffers from lag. Besides, the robust controller only guarantees the influence of interference within a certain range. For these compared methods, complete tracking of the trajectory is difficult to achieve.
Physical simulation
To show the effectiveness of the proposed method in real environment, physical simulation is presented. Simulation environment is shown in Figure 10.

Simulation environment of robot trajectory in structured PDS. PDS: perspective dynamic system.
In simulation, it is supposed that (1) the initial motion direction remains consistent and the initial position value error is 5 cm and (2) the proposed ILC is applied and the parameters are defined as

The performance of robot trajectory tracking after eight times iterations.
Conclusions and future work
In contrast to earlier studies, the current study adopts PDS and ILC to enhance the performance of path tracking of mobile service robots. In consideration of the motion environment of a robot, 2D-PDS is built to collect the trajectory information of a service robot for path-tracking estimation. Under the proposed ILC approaches, iteration-varying initial shift and desired trajectories are allowed at each iteration. The proposed structure and approaches are verified to be efficient through numerical simulations of a service robot in PDS.
Future works include the following. First, 3D-PDS should be built to estimate nonplanar space motion. Then, ILC for nonrepetitive path tracking of service robots when the desired trajectory
Footnotes
Acknowledgement
The authors would like to thank the associate editor and the anonymous reviewers who contributed their valuable comments to this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key R&D Program of China [Grant No. 2017YFB1302400], National Natural Science Foundation of China [Grant Nos 61773242, 61803227, and 61375084], Major Agricultural Applied Technological Innovation Projects of Shandong Province [SD2019NJ014], Shandong Natural Science Foundation [ZR2019MF064], and Intelligent Robot and System Innovation Center Foundation [2019IRS19].