
Abstract
Path planning and tracking control are two performance-critical tasks for wheeled mobile robots, particularly when nonholonomic constraints are imposed on robots in dynamically uncertain conditions. Accomplishing certain performance and safety considerations related to path-tracking, such as global stability, transient performance, and smooth finite-time convergence, becomes more difficult for nonholonomic robots. This paper is concerned with proposing a new adaptive robust finite-time tracking control approach for a large class of differential drive autonomous nonholonomic wheeled mobile robots (NWMRs) that are subject to structured uncertainties and extraneous disturbances with fully unknown dynamics. For this purpose, nonlinear kinodynamics of a type of rear-wheel drive NWMRs are developed by incorporating the skid/slippage constituents of the wheel motion. Then, a path-tracking controller is proposed using a continuous finite-time adaptive integral sliding mode control coupled with an integral backstepping approach (FTAISM-IBC). For the adaptive controller design, the entire nonlinear dynamics of the robot, including nonlinear vector functions and control gain functions, together with extraneous disturbances, are estimated by leveraging the universal approximation capabilities of radial basis neural networks (RBFNNs). The finite-time stability proof is presented by utilizing the Lyapunov stability theorem. Furthermore, the adaptive gains are derived to ensure the finite-time stability of the system subject to unknown functions, parametric variations, and unknown but bounded disturbances. Finally, the effectiveness of the proposed controller is evaluated through simulations in terms of several key performance indicators against several reported studies.
Keywords
Introduction
Mobile robots have presented us with transformational opportunities due to their broad applications, such as monitoring, patrolling, entertainment, military, and agriculture.1–3 In order to fully utilize their potential for such tasks, it is critical to develop efficient and stable tracking control algorithms that ensure their safe and reliable operations under diverse conditions. Reported studies have employed a wide spectrum of methods, ranging from classical control to machine-learning-based intelligent techniques, for developing tracking-control strategies for mobile robots. 4 The need for further investigations, however, has been emphasized to address certain aspects associated with autonomous navigation, obstacle avoidance, and path-planning of mobile robots.5,6 In particular, developments in efficient tracking controllers for mobile robots with nonholonomic constraints require more efforts considering their inherent structural complexities, singularity issues, hard nonlinearities, uncertainties, and physical limitations for instantaneous lateral motion without slipping.
Reported studies have employed different control techniques such as neural network-based adaptive control, 7 sliding mode, 8 backstepping, 9 feedback linearization, 10 and optimal control, 11 considering only kinematics robots with simplistic nonholonomic constraints. The contributions due to dynamics of the robot and wheel-surface interactions are thus generally neglected. Additionally, the velocity components of robots were employed as virtual control inputs, while the actual constraints on the states were not considered. Under such assumptions, the path-tracking tasks were considered as an affine non-strict feedback control problem that could immediately build up the desired robot velocities, also known as ideal/perfect-velocity tracking. This assumption, however, is easily violated for nonholonomic wheeled mobile robots (NWMRs) operating at relatively higher speeds due to kinodynamic constraints and inertial properties. Furthermore, the control inputs employed for speed/position trackability of NWMRs are commonly in terms of direct torque from electric motors, where associated delays attributed to build up of directional forces are generally neglected. In order to address these challenges, a recent study has proposed intelligent control algorithms considering comprehensive dynamics of the robot together with the overall system’s natural response to inputs generated by the differential drive wheels. 12
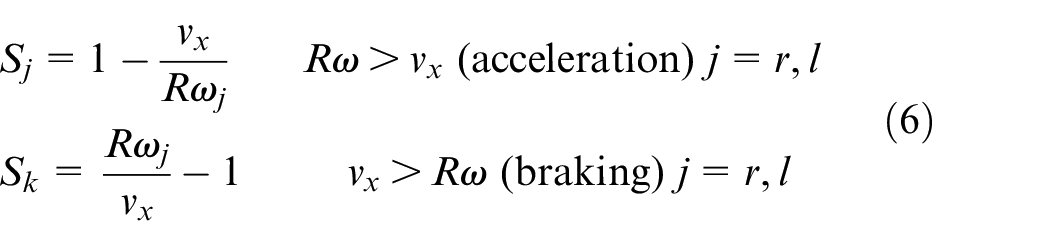
A number of studies have proposed kinodynamic models of mobile robots by incorporating dynamic interactions of wheels with the ground. Several studies have assumed pure rolling without effective wheel slippage (e.g., Cen and Singh 13 ; Kuric et al. 14 ), which can be considered valid only in certain circumstances, such as driven wheels with large dimensions and sufficient adhesion characteristics. The slippage or skid of robot wheels, however, can occur in various real-world conditions, such as on wet/icy or deformable ground surfaces, high speeds, braking, and rapid cornering. The NWMR becomes an under-actuated nonlinear dynamic system, with potential violation of nonholonomic constraints, particularly during cornering, and thereby degradation of the desired control performance and even turning a stable closed-loop system into an unstable one. The consideration of wheel slippage and skid in dynamic modeling of NWMRs is thus essential for predicting more accurate responses of the robot to given inputs, and to design control algorithms for realizing improved tracking and directional stability.
The wheel slippage, however, constitutes a difficult complexity for the control strategy, which must be designed to ensure robustness and stabilization of the closed-loop system against changes in wheels’ slip/skid considering practical ranges of representative operating conditions and wheel-surface adhesion properties. The influences of wheel slip/skid and slip angle variations on the effectiveness of the navigation control of NWMRs, however, have been explored in only a few studies.15–19 The robust adaptive control approach has been reported to effectively address the problem of wheel slippage variations in path tracking of NWMRs. For example, Li et al. 20 proposed an adaptive control approach to counteract the adverse effect of wheel slippage by employing a gyro and multiple encoders. Moreover, an omnidirectional mobile robot examined the tractive force effect as a function of different slippage levels, 21 leading to a path tracking and automated navigation model.
Kang et al.
22
proposed a control technique to account for the effects of matched or mismatched uncertainties by incorporating generalized extended fuzzy disturbance observer dynamics. Tian and Sarkar
23
modeled the underactuated dynamics of a mobile robot in the presence of wheel slip according to second-order nonholonomic constraints to achieve enhanced auto-navigation based on re-compensated wheel torque. An adaptive robust observer for the wheel slip was designed in Cui et al.
24
based on the orientation angle of the automated navigation of WMRs, which was verified via experiments. Taghavifar et al.
25
developed a kinodynamic model of a NWMR considering wheel slippage and deformable surfaces and proposed a route planner using a Chaos-enhanced Accelerated Particle Swarm Optimization (CAPSO) algorithm for safe and collision-less motion. The essential concepts of terramechanics were utilized to express critical forces and moments applied to the NWMRs, and an adaptive robust control algorithm was constructed using an improved sliding surface and RBF-NN approximator to achieve enhanced tracking performance and global asymptotic stability in the presence of unknown parameters of the robot and the terrain. A few studies have investigated finite-time tracking control of NWMRs. For instance, an adaptive fast non-singular sliding mode control (AFNTSMDC) algorithm was developed to explore the robustness and finite-time convergence of the NWMRs.
26
The effectiveness of the proposed algorithm was verified experimentally, and it was considered meritorious because of its simplicity and reasonably good performance. Such a method, however, would exhibit significant performance limitations in the presence of time-varying and unknown disturbances or when the system model full-state measurements are lacking. Recent studies further expand this field, with Wang et al.
27
exploring global asymptotic and Mittag–Leffler synchronization in reaction-diffusion neural networks, highlighting the role of network system coefficient matrices and Shen et al.
28
addressing
The reviewed state-of-the-art literature reveals the need for additional efforts to improve path-tracking performance of NWMRs by incorporating their kinodynamics, wheel slippage/skid, finite-time convergence, and reliable estimations of unknown nonlinear system functions, disturbances, and structured uncertainties. Addressing the challenges in applying the proposed method to nonholonomic mobile robots, a critical analytical challenge lies in kinodynamic modeling, particularly integrating wheel slippage/skid dynamics. The paper introduces complex nonlinear vector functions and control gain functions, which are crucial for accurate modeling. These functions are estimated using RBFNNs, demonstrating innovative integration of machine learning for robust and adaptive control. This method’s innovation is evident in its ability to handle the nonholonomic constraints and wheel dynamics, a significant leap from traditional approaches that often oversimplify these aspects. The present paper contributes to the current literature considering: (i) dynamic modeling of NWMRs with bounded variations in model parameters, while incorporating the impact of wheel slippage/skid on path-tracking control by choosing an arbitrary tracking location on the robot frame; (ii) entire nonlinear functions of the model to be fully unknown as opposed to the reported studies that commonly consider the disturbances or only a part of the model being unknown; (iii) finite-time convergence of the robot states to the desired trajectories. while the NWMR is subject to disturbances and uncertainties. Moreover, the finite-time stability is ensured using a continuous adaptive integral sliding mode control method coupled with an integral backstepping approach.
The organization of the remaining sections of the paper is as follows. Section 2 presents the problem formulation and development of a kinodynamic model incorporating wheel slippage/skid together with the control input from two electric drives. The design of a robust adaptive finite-time controller for a class of affine-input NWMRs based on an integral sliding mode control method coupled with an integral backstepping approach subject to wheel slip/skid is presented in Section 3. Section 4 discusses the results, which are compared with those obtained from reported benchmarking methods. The final remarks and conclusions are summarized in Section 5.
System Modeling and Problem Formulation
In order to examine the dynamic response of the mobile robot for the purpose of path tracking, it is useful to describe the governing equations of motion based on a body-attached reference system that is easily mappable to the global coordinate system. Additionally, the rear wheels are taken as the driving wheels for the system under study, while the front wheels are assumed free rolling. The free-body diagram of the nonholonomic robot in the plane of motion (Figure 1) shows the independently driven rear wheels via two separate DC motors. The drives constantly deliver the required torques, which serve as the control inputs for guiding the robot to reach its intended trajectory. The ideal voltages for generating the required torques are acquired through pulse-width modulation (PWM). The differential drive wheels also produce the desired yaw rate for cornering. The governing kinematic relations are derived according to the nonholonomic constraints, and coupled lateral and longitudinal motions of the robot. The directional velocities and yaw rate of the robot are expressed based on the angular velocities of the rear wheels (i.e.





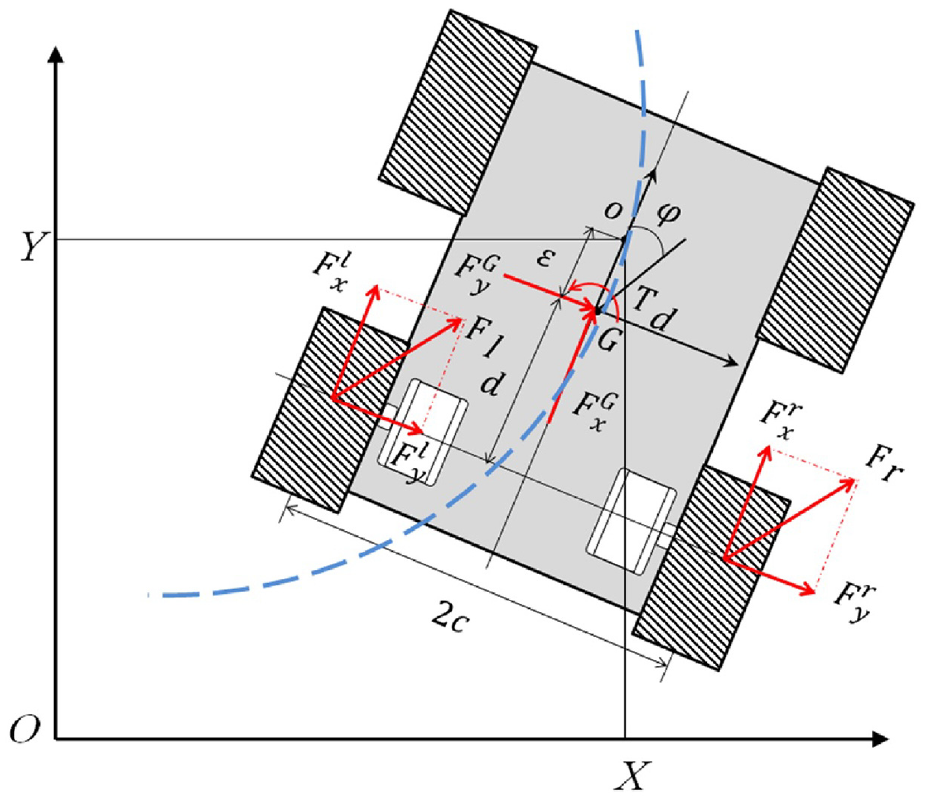
Yaw plane model of the nonholonomic NWMR showing independently driving rear (local coordinate system: o-xy; global coordinate system: O-XY).
where
where



where X and Y represent the robot position in the global reference system, and





where
By rearranging (10)–(14) together with the kinematic relations in (1)–(9), the state-space representation of the overall system is obtained as:

where
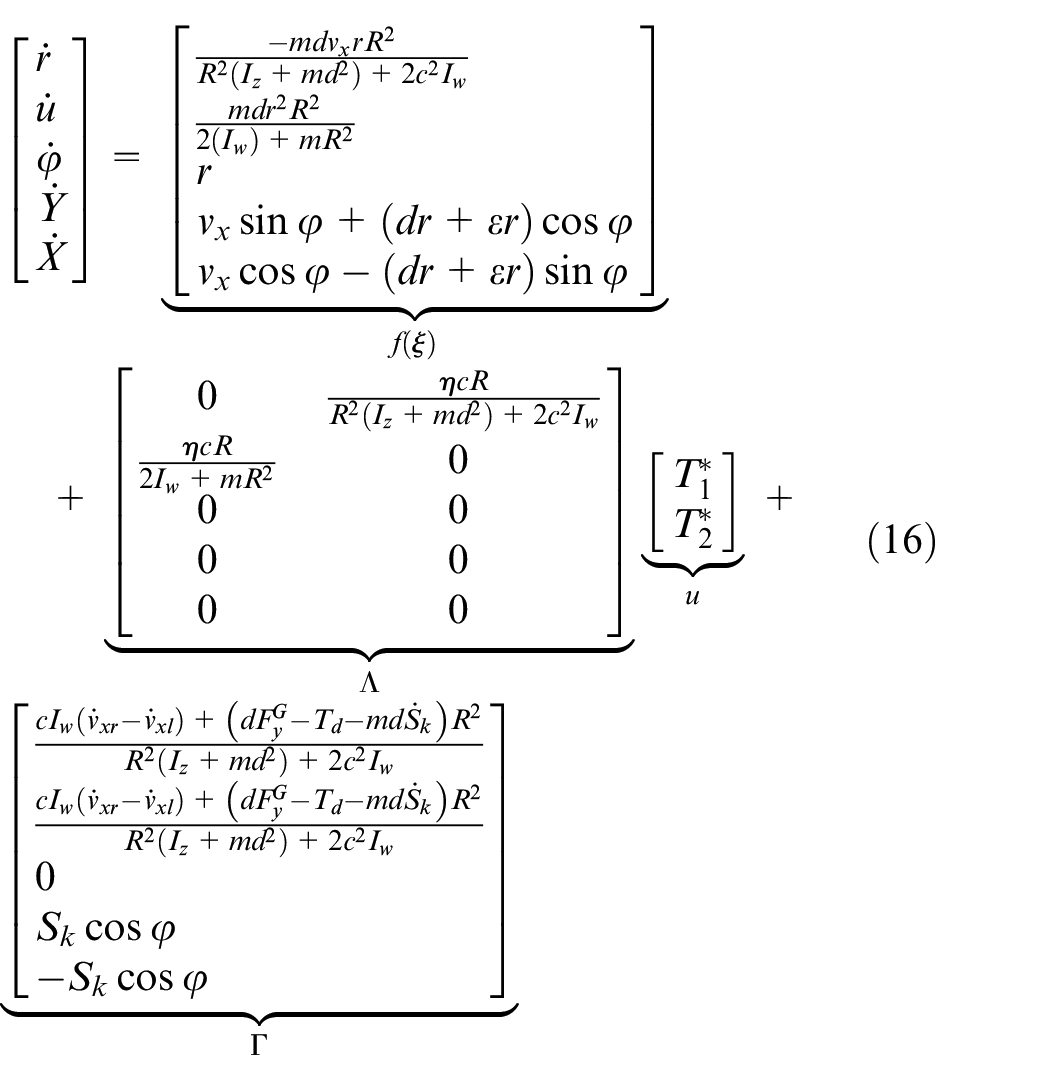
where
Controller design
This section describes the proposed controller design, which consists of two main stages: (i) a tanh-based finite-time integral sliding mode controller (FISMC); and (ii) an adaptive radial basis function neural network (RBFNN) approximator-based finite-time integral sliding mode controller linked to an integral backstepping controller (FTAISM-IBC). The second stage of the controller is essential for ensuring unknown but bounded nonlinear function approximations, robustness against structured and unstructured uncertainties, and to improve stability and tracking performance of the NWMR. The primary goal of developing the finite-time tanh-based AISMC is to ensure finite-time convergence of the robot’s heading angle and lateral position to the reference trajectories, irrespective of the bounded external disturbances that may exist. The hyperbolic tangent function also guarantees smoothness of the switching function to overcome the chattering drawback of the classical sliding mode convergence laws. Additionally, the RBFNN approximator is developed to estimate the unknown nonlinear functions of the model in the absence of knowledge of dynamics of the NWMR. The designs of the proposed FISMC and FTAISM strategies are described below.
Finite-time ISMC controller design
For the finite-time tracking control of the NWMRs, an integral sliding mode control (ISMC) approach is employed by defining the tracking error vector,

where

Using the classical sliding-surface reaching rule,

where

where


where

Taking the first-order time derivative of the above function along the trajectories of the system and combining with (18) yields:
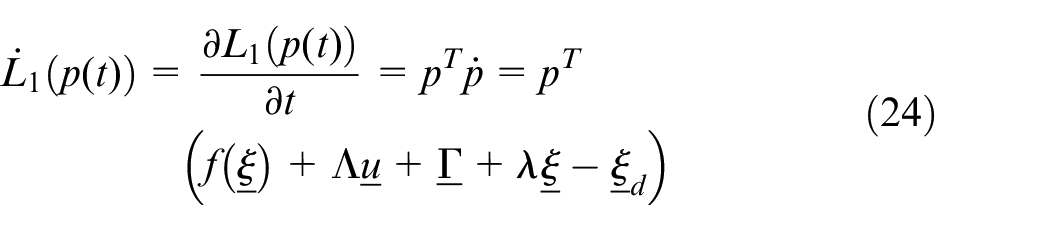
Using the control law in (21), the above can be rewritten as:

Lemma 2: Assume a continuous positive-definite function V(t) that fulfils the inequality defined below31,32:

Thus,

According to Lemma 2, and considering

The above converges to equilibrium point in the finite time

The global stability of the closed-loop system is thus ensured within the finite time. From the above, it is evident that the rate of convergence of the control system is a function of
Finite-time Adaptive Integral Sliding Mode-Backstepping Controller
The radial basis function neural networks (RBFNNs) are commonly utilized in various modeling and control domains as powerful estimation tools due to their adaptable approximation capabilities.
33
For any function

where

where


where


For the design of integral backstepping controller, the open-loop dynamics of the system in (15) is converted to:

where

Assuming that the functions in (37) are completely unknown, the desired virtual control input

Applying the basic mathematical operations and combining (38) and (37), yields:

By rearranging (39), together with (32) to (35), the following dynamics for the integral sliding surface based on an integral backstepping controller is obtained:

Theorem 1. Considering a generic form for the wheeled mobile robots with non-holonomic constraints, described according to (15), the closed-loop controlled system can be designed with globally stable origin in the finite-time with the control input (40) and the adaptive parameters (41)–(43), such that:




The time derivative of (44) along the trajectories of the closed-loop dynamic system is given by:

Substituting (40) and (39) into (45), yields:

By converting the terms including the adaptive errors into the trace operator form, (46) can be expressed as:
By using the trace properties, (46) is simplified to:
Through the adaptation laws (41)–(43), and

Considering

And thus, (50) converges to the equilibrium point in the finite time

And this completes the proof ▪. The convergence time is a function of the start time, the magnitude of the Lyapunov function candidate at
Simulation results and discussion
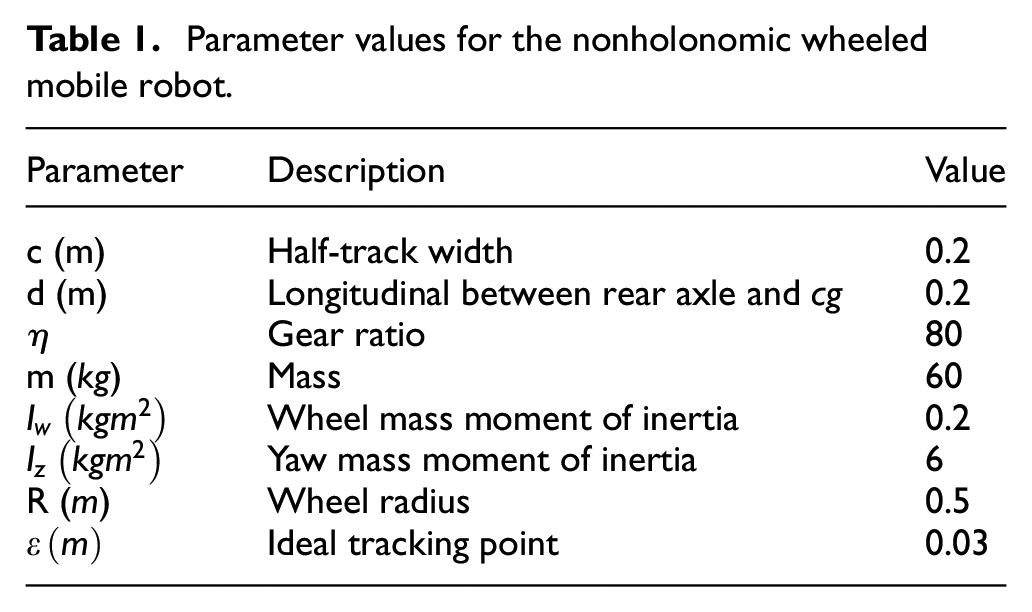
The effectiveness of the proposed control algorithm for the path-tracking control of NWMR is assessed through two scenarios of a straight line and a U-shaped path. The parameters employed during the simulation part of the proposed controller are shown in Table 1. Throughout the simulations, a pulse-shaped disturbance signal of width 0.5 s and magnitude of 30% representing the slippage ratio for each wheel is applied to the robot. Such disturbances can arise due to parametric variations in the vector of parameters and cause undesirable response to the given control inputs. This study emphasizes the critical role of key parameters
Parameter values for the nonholonomic wheeled mobile robot.
Straight line tracking performance
The performance of the designed controller is first studied subject to the external disturbances along a straight-line path:

Figure 2 presents the time histories of the robot’s global position and velocity components in the X- direction, as well as the reference trajectory. An apparent jump is observed at the start of the motion, which can be attributed to the random initial parameters chosen for the adaptive parameters. One can note that the applied torques to the wheel motors steer the robot in the longitudinal direction at an ideal rate (Figure 2). Similarly, the time histories of the robot’s position and velocity compared to their reference trajectories in the lateral direction (Y-coordinate) are shown in Figure 3. A similar trend is observed for the variations in the actual trajectory of the robot in the Y-direction, particularly for the velocity component of the motion. There is a comparable trend for the velocity and position components, which is intuitive to generate a linear path.
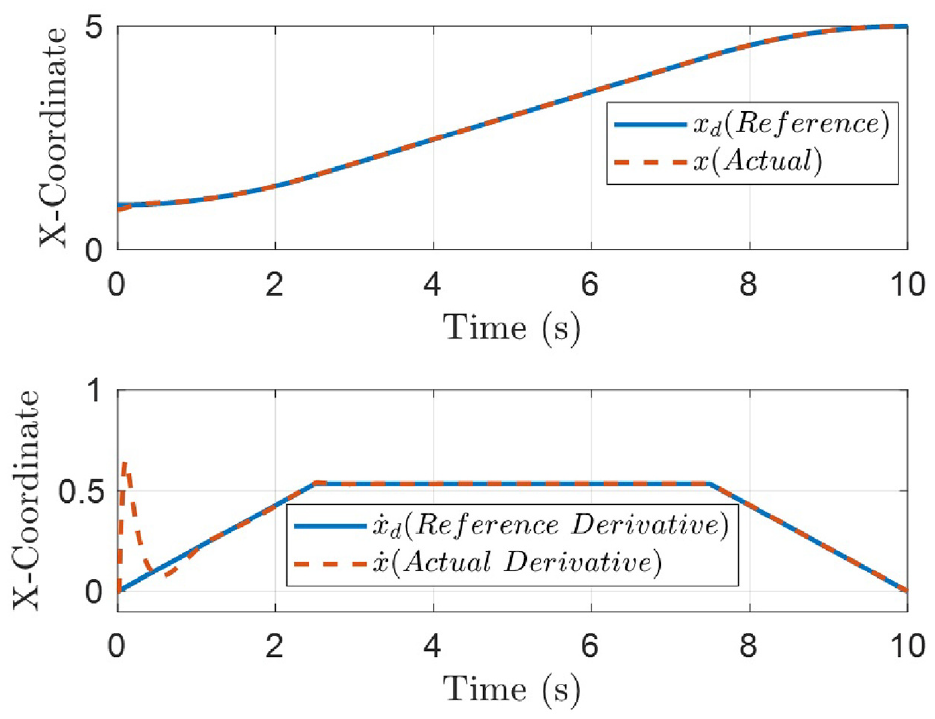
Time histories of the robot position and velocity in the global X-coordinate system.
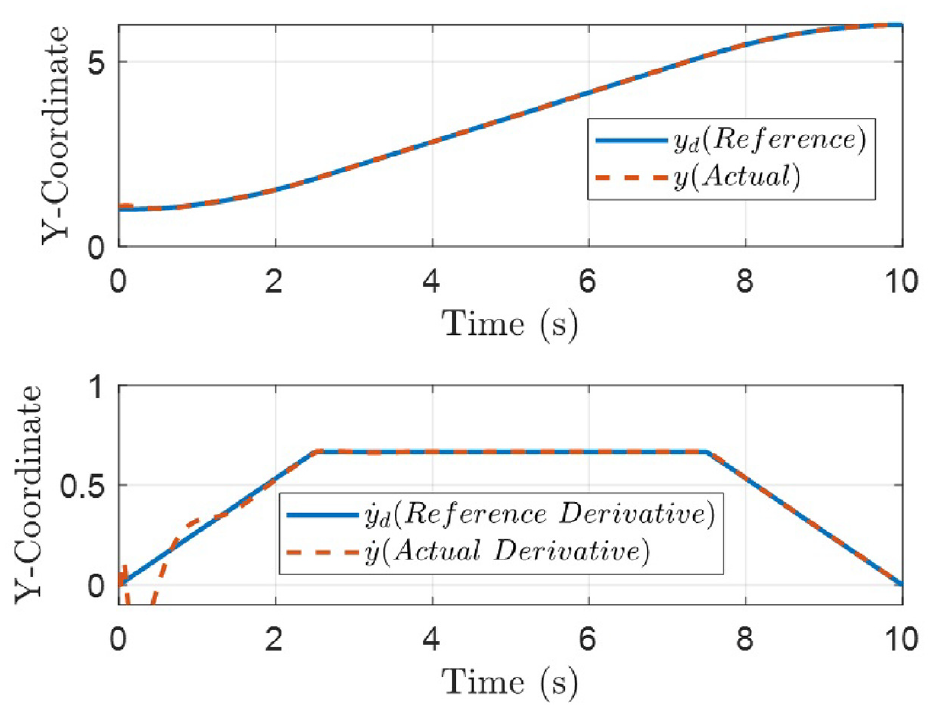
Time histories of the robot position and velocity in the global Y-coordinate system.
Figure 4 illustrates the error variations and the derivative of errors in the longitudinal and lateral directions. The asymptotic convergence of the error terms in finite time is apparent in Figure 4, although a considerable error variation is observed at the onset of the motion, that can be attributed to the generation of the control input to generate the desired tracking performance for the robot. The control signals in terms of the right and left wheel torque inputs are presented in Figure 5. The control inputs are bounded in a range smaller than ±1.5 N.m., in the start, and move into a smaller bound around 2 s after the simulation starts. Such variations and the stabilization time (finite-time convergence) less than 2 s conforms with the results in the tracking error variations (Figure 4). The convergence time can be adjusted according to (51) and based on the introduced convergence parameters. Figure 6 compares the reference trajectory for the robot in the global coordinate and the actual trajectory provided by the proposed FTAISM-IBC controller subject to disturbances alongside a linear path during a forward and backward movement. Apart from the short-time transient at the beginning of the robot motion, the path-tracking performance keeps improving and can rapidly converge to the reference trajectory in a finite time. Time histories of the adaptive weights and their convergence to the equilibrium are seen in Figure 7, which conforms to the global asymptotic convergence rules for these weights.
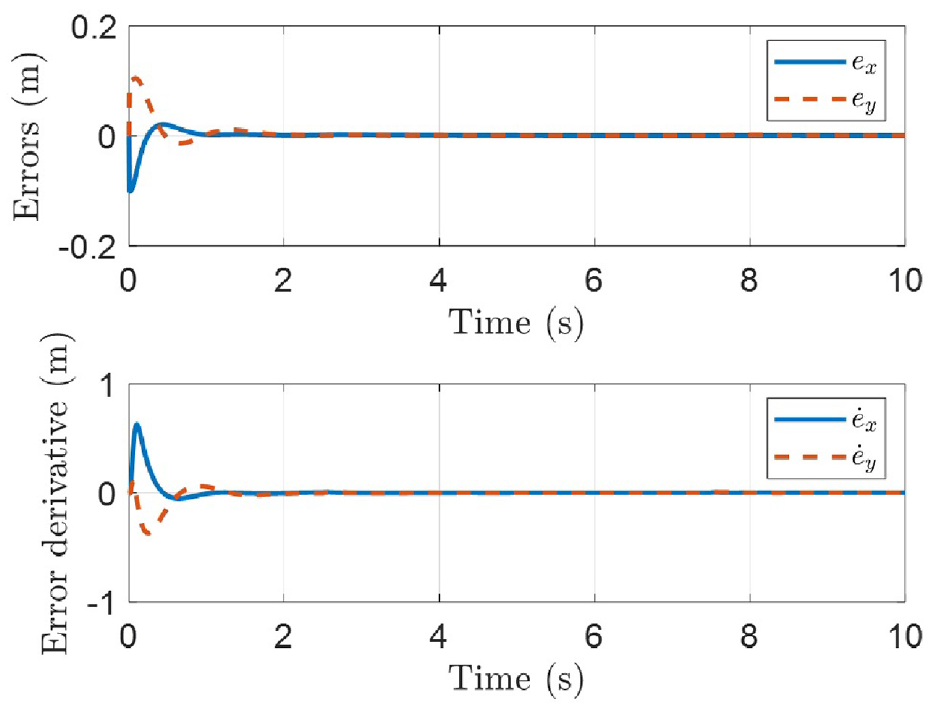
Tracking errors and error derivatives in X- and Y- directions.
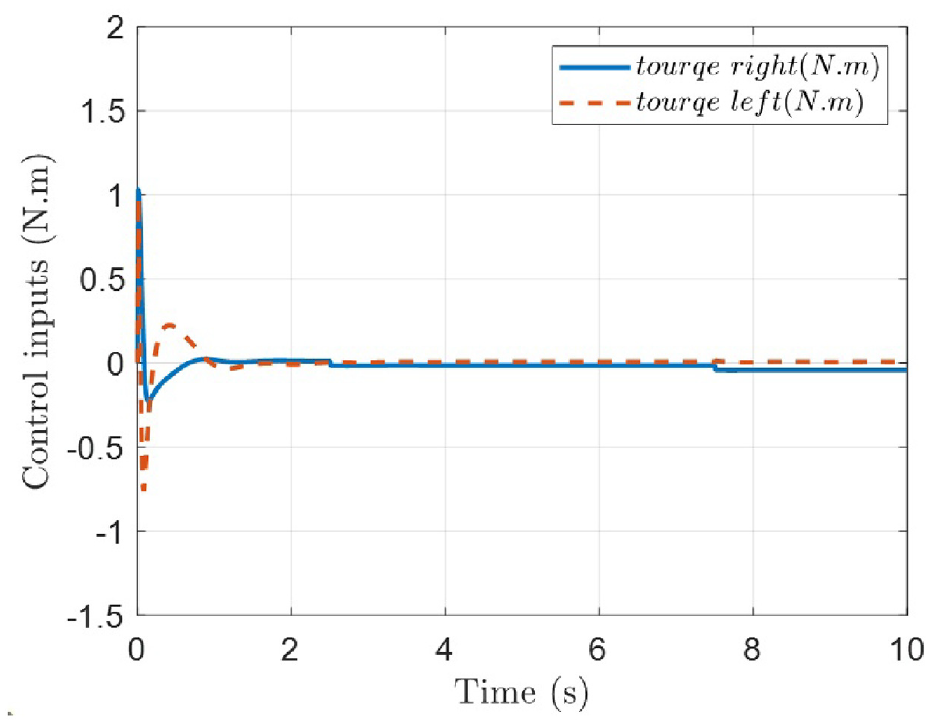
Control inputs in terms of the direct torque signals applied to the robot’s right and left wheels.
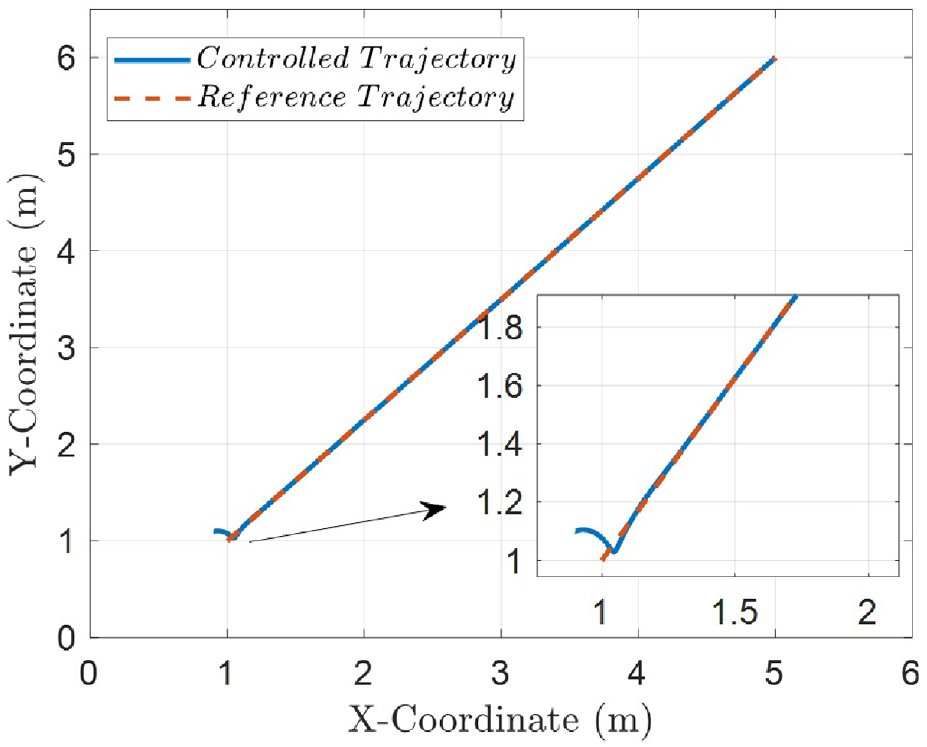
Path-tracking performance of the wheeled robots in the global coordinate system for a linear path subject to disturbance.
Time-histories of the adaptive weights and their convergence to the equilibrium.
U-shaped path-tracking performance
For further evaluation of the proposed FTAISM-IBC controller in a more complex task, a curved path is considered as follows:
In the second trajectory, the simulation time is extended to 20 s to complete a U-shaped curved path that can further demonstrate the robot’s close-loop performance in transient conditions. Figure 8 shows the time histories of the robot’s speed and displacement variations in the longitudinal compared to the corresponding reference trajectories. An apparent difference is observed at the start of the motion and 5 s after the simulation begins. These slight variations are attributed to the initial conditions and the impact of the applied pulse-shaped disturbances. Figure 9 demonstrates the time histories of the robot’s position and speed trajectories compared to the reference trajectories in the lateral direction.
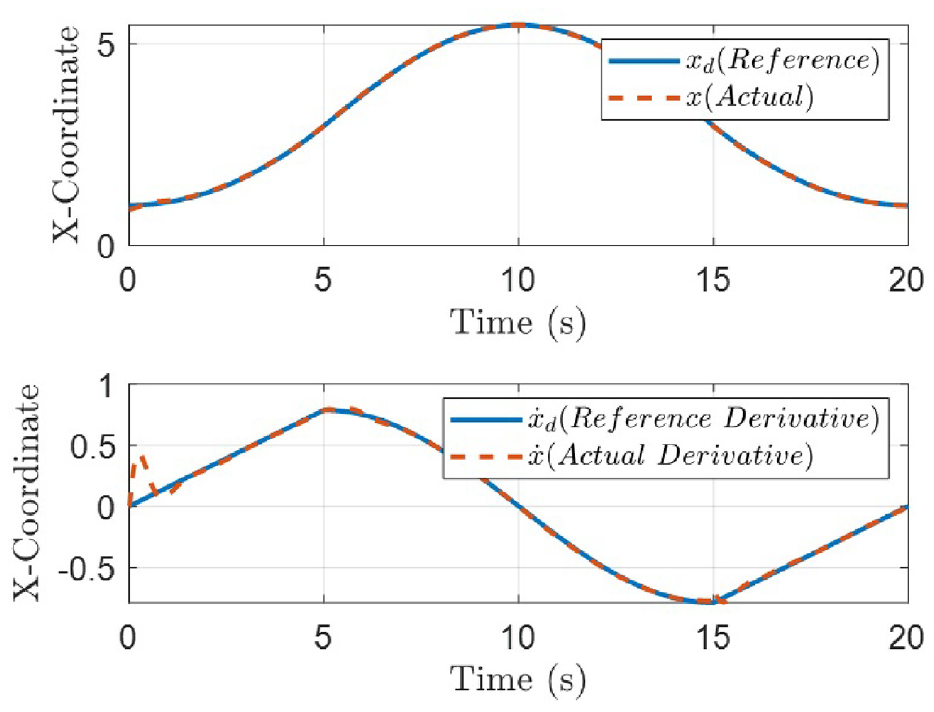
Time histories of the robot position and velocity in the global X-coordinate system.
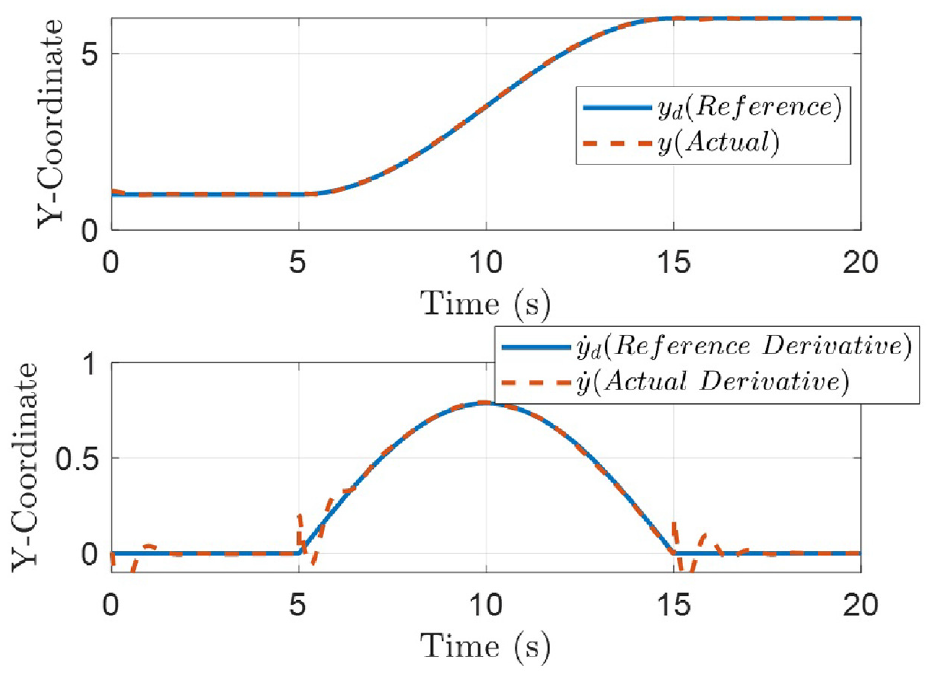
Time histories of the robot position and velocity in the global Y-coordinate system.
Compared to the linear path trajectory, the proposed closed-loop controller generates larger error values in the lateral direction, mainly after 5 and 15 s from the start of the motion. The main impact of the disturbances is observed in the velocity component, which is considerably filtered for the position tracking constituent. Figure 10 shows the error variations and the derivative of errors in the longitudinal and lateral directions. The asymptotic convergence of the error terms in finite time is apparent in Figure 10, except for two small perturbations at t = 5 s and t = 15 s when the disturbances are applied to the wheels’ motors. However, the proposed controller performs satisfactorily in rejecting the disturbances and robustly converging to the equilibrium. The control efforts in terms of the right and left wheel torque inputs are seen in Figure 11.
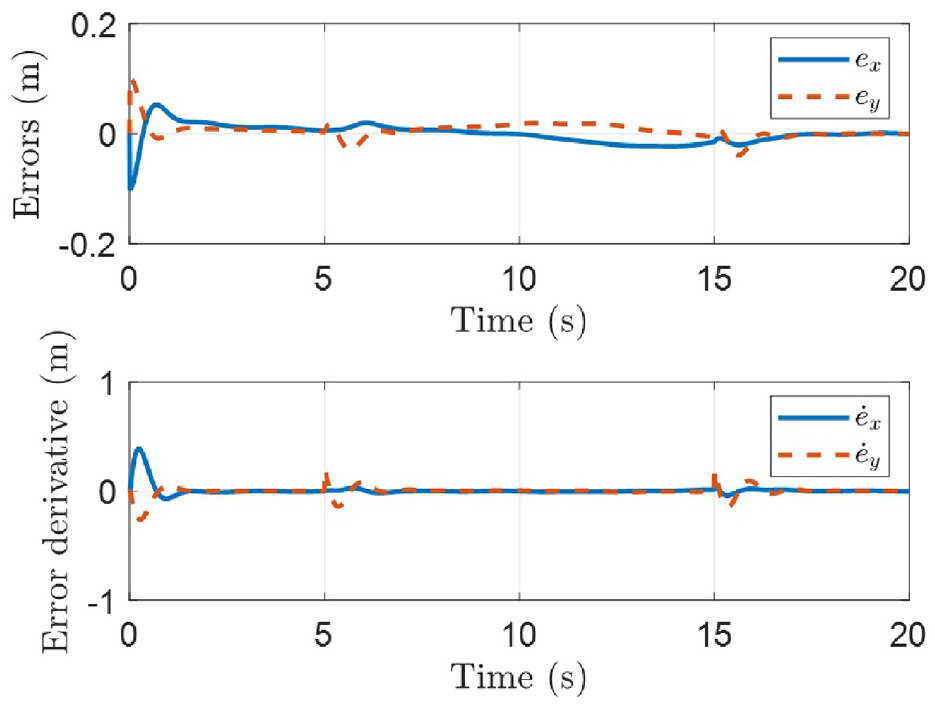
Tracking errors and error derivatives in the X- and Y-directions.
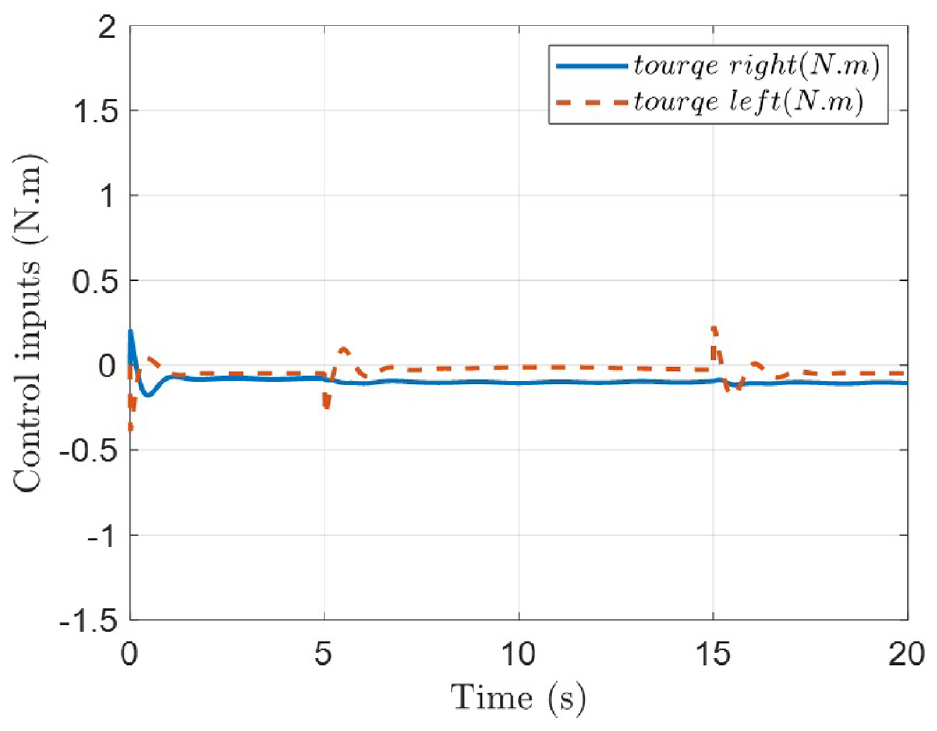
Control inputs in terms of the direct torque signals supplied to the NWMR’s side wheels.
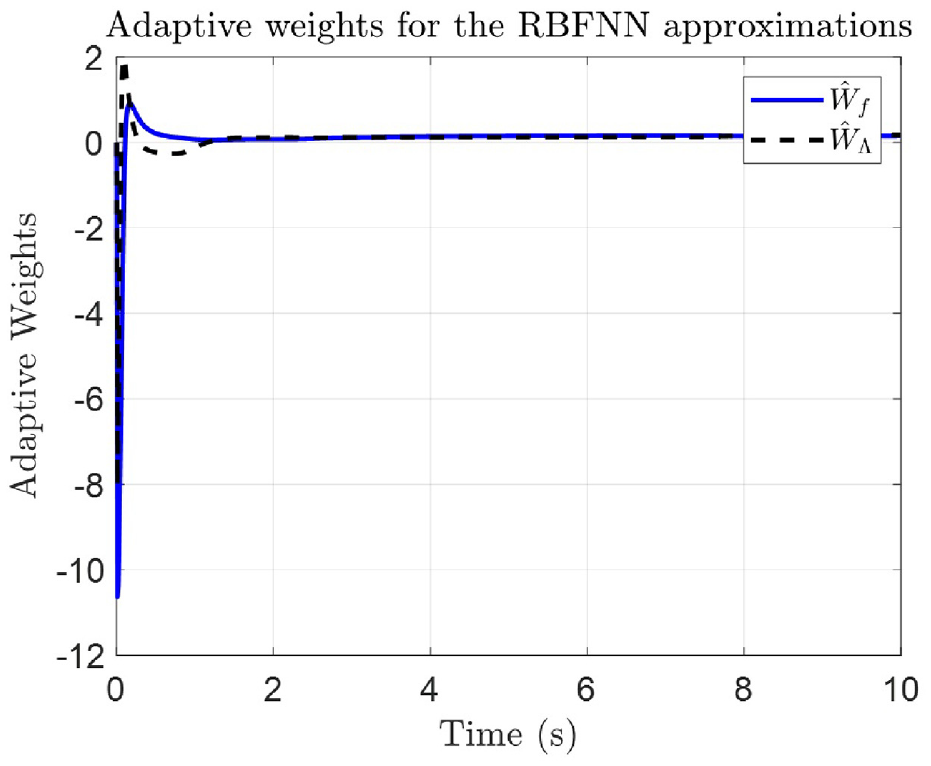
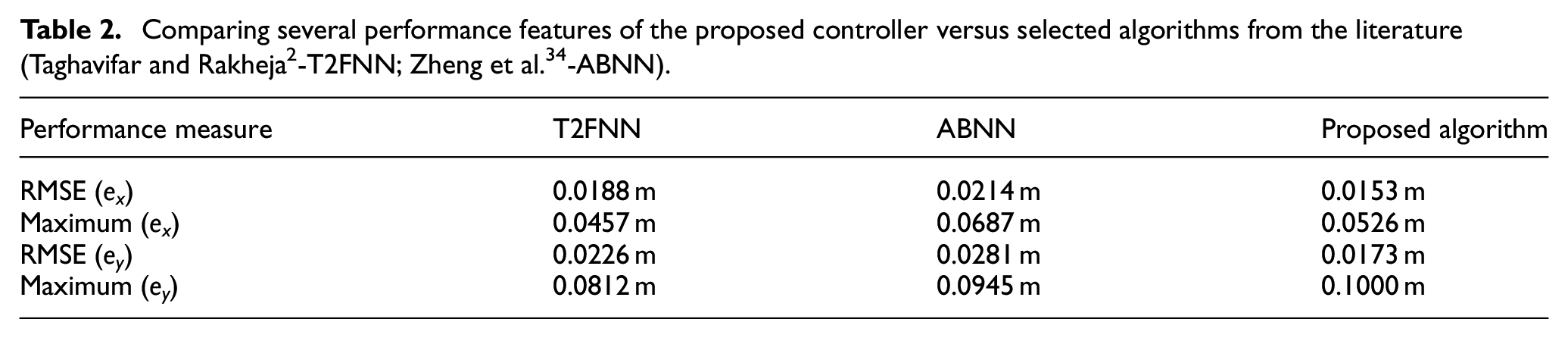
The control inputs are bounded in a range smaller than ±1 N.m., suggesting the feasibility of the proposed controller. Figure 12 compares the reference trajectory for the robot in the global coordinate and the actual trajectory provided by the proposed FTAISM-IBC controller subject to disturbances alongside a linear path during a forward and backward movement. Apart from the short-time transients at the beginning of the robot motion, the path-tracking performance keeps improving due to adaptive learning and can rapidly converge to the reference trajectory in a finite time. Time histories of the adaptive weights and their convergence to the equilibrium are seen in Figure 13, which are constantly updated in response to the varying conditions of the robot subject to external disturbances. Finally, a comparative analysis of the path-tracking results obtained by the proposed controller and the reported studies, type-2 fuzzy neural network (T2FNN), 2 and adaptive backstepping neural network (ABNN) 34 is shown in Table 2. The performance metrics considered for this analysis are the root mean of squared errors (RMSE) and the maximum error (Maximum) in both the longitudinal and lateral directions. The various control techniques were tested under similar disturbances and operating conditions, with the same U-shaped curved path. The results obtained from Table 2 reveal that the proposed controller outperforms the other path-tracking algorithms for NWMRs, particularly in terms of the mean of the errors in both directions.
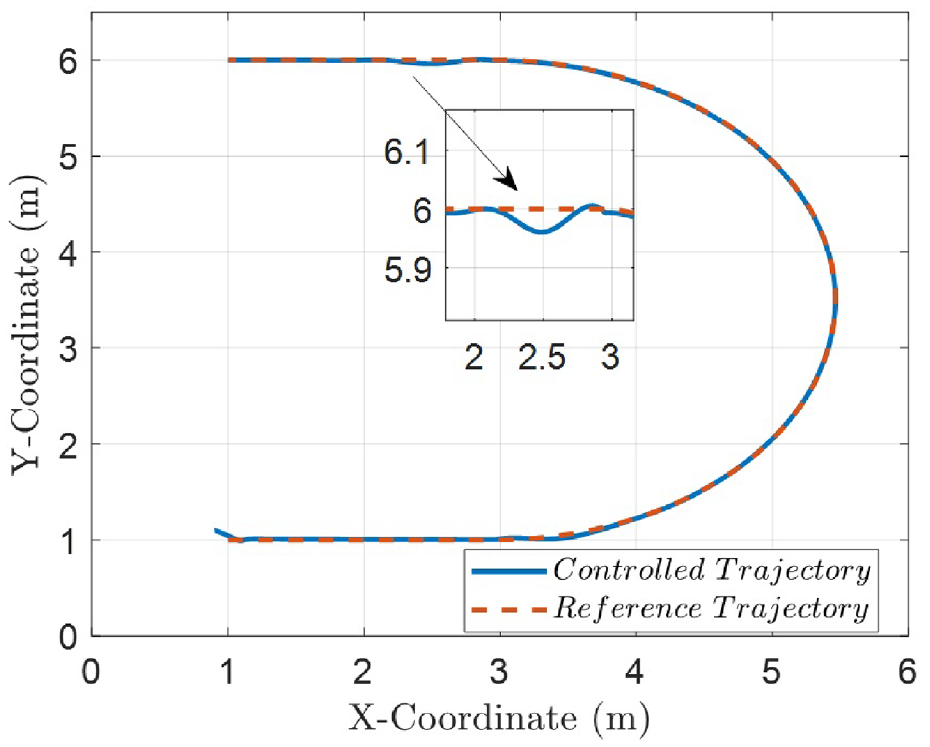
The tracking control plot of the mobile robot in the global coordinate system during a curved path subject to disturbances.
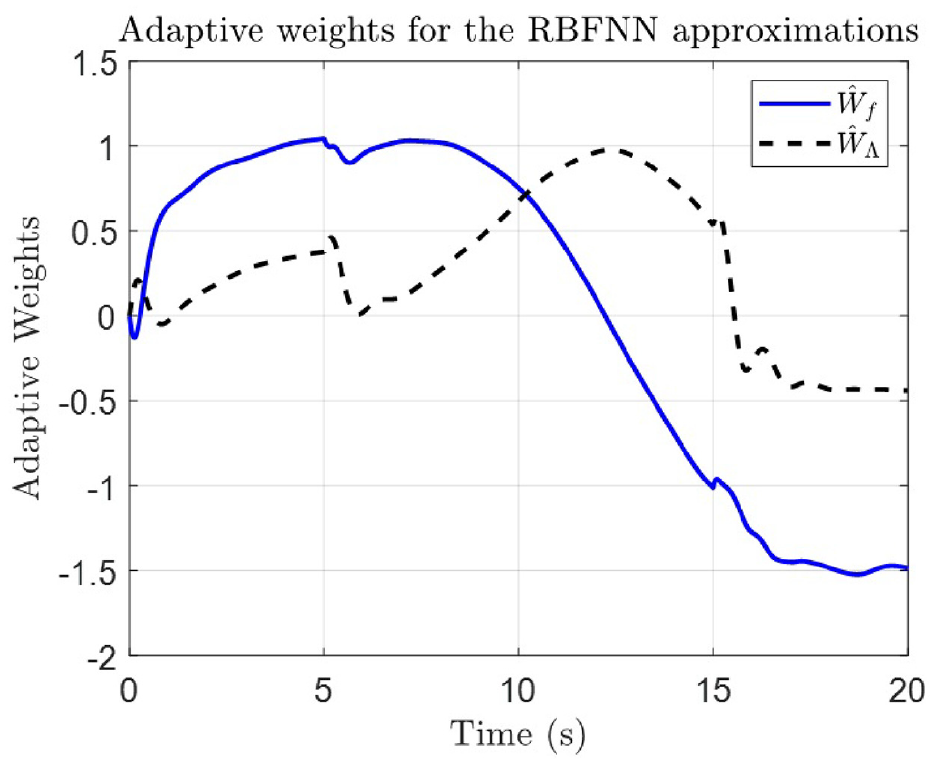
Time-histories of the adaptive weights throughout the simulation in a bounded surface.
Conclusions
In this paper, the problem of path-tracking control for a broad class of NWMRs with nonholonomic constraints and unknown nonlinear dynamics was investigated. To this aim, an adaptive robust finite-time path-tracking controller was designed for NWMRs in the presence of wheel slippage:
The kinodynamics of the NWMRs were developed considering the impacts coming from the skid/slippage motions of the robot wheels.
A path-tracking controller was conceived using a continuous finite-time adaptive integral sliding mode control method coupled with an integral backstepping controller (FTAISM-IBC).
Radial basis function neural networks (RBFNNs) were utilized to estimate the full nonlinear dynamics of the robot (nonlinear vector functions), the gain function, and disturbances. The estimated functions were then utilized for the development of the FTAISM-IBC.
The proof of stability was guaranteed by employing the Lyapunov stability theory, and the adaptive gains were obtained to ensure the global stability of the system in a finite time. The effectiveness of the proposed controller will be evaluated against the reported studies through simulations. Future work will involve developing an advanced framework for integrating predictive modeling, enhancing the control strategy’s anticipation and handling of dynamic environmental changes and uncertainties.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Ethical approval
This paper does not deal with any ethical issues.
Informed consent
We declare that all authors have informed Consent.
Data availability
Enquiries about data availability should be directed to the authors.