
Abstract
This article concerns a disturbance observer-based L1 robust anti-disturbance tracking algorithm for the longitudinal models of hypersonic flight vehicles with different kinds of unknown disturbances. On one hand, by applying T-S fuzzy models to represent those modeled disturbances, a disturbance observer relying on T-S disturbance models can be constructed to track the dynamics of exogenous disturbances. On the other hand, L1 index is introduced to analyze the attenuation performance of disturbance for those unmodeled disturbances. By utilizing the existing convex optimization algorithm, a disturbance observer-based proportional-integral-controlled input is proposed such that the stability of hypersonic flight vehicles can be ensured and the tracking error for velocity and altitude in hypersonic flight vehicle models can converge to equilibrium point. Furthermore, the satisfactory disturbance rejection and attenuation with L1 index can be obtained simultaneously. Simulation results on hypersonic flight vehicle models can reflect the feasibility and effectiveness of the proposed control algorithm.
Keywords
Introduction
Recently, the research of hypersonic flight vehicle (HFV) has received considerable attention with great practical value in civil and military applications (see Fidan et al. 1 and Parker et al. 2 ). By comparing those conventional flight vehicles, HFVs can realize the supersonic speed flight and further cross over the atmosphere and make the cruising flight. 3 Some other advantages, for example, lower launch cost, speediness, reusability, and maintainability can also be fully embodied from HFVs. However, it is usually a difficult task to model and design the robust controller for an HFV because of the uncertainty and complexity of atmospheric conditions, the strong nonlinear cross-couplings between different physical devices, the integrated airframe propulsion, and so on (see Xu et al. 4 and Gregory et al. 5 ). As a result, most of existed results are based upon simplified longitudinal models, in which only five main variables including velocity, altitude, flight path angle, pitch rate, and angle of attack are considered. 5,6,7 Some advanced control methods, for example, robust control, 5,7,8 adaptive control, 9 sliding mode method, 10 backstepping control, 11,12 linear parameter-varying control, 13 and fault-tolerant control, 14,15 have been successfully applied into the longitudinal models of HFV. Meanwhile, some novel modeling tools including fuzzy systems and neural networks have also been used to describe the model of HFV (see Xu et al., 4 Jiang et al., 14 Li et al., 15 and Wu et al. 16,17 ).
It is well known that HFVs are always confronted with different types of disturbances due to the complex flight environment when cruising flight in the atmosphere, for example, wind gust, electromagnetic interferences, friction disturbances, and atmospheric turbulence. 16 –19 Hence, the research of robust anti-disturbance algorithm of HFVs is a challenging task. 20 Some mature algorithms of robust control, such as L2/L∞ control, H2/H∞ control, and μ-synthesis method (see Scherer and Weiland 21 and Zong et al. 22,23 for details), have been given for achieving a good performance level of disturbance attenuation to HFV models. 5,16,17 In addition, disturbance observer-based control (DOBC) gives an active solution to estimate and reject those unknown exogenous disturbances and has received considerable attentions (see Guo and Cao, 20 Guo and Chen, 24 Wei and Guo, 25 and Xu et al. 26 ). Almost all of the controlled systems, such as transport aircraft, 27 robot manipulators, 28 magnetic levitation (MAGLEV) suspension systems, 29 non-Gaussian distribution control systems, 30,31 permanent magnet synchronous motor (PMSM) models, 32,33 Markovian jump systems, 34 and A4D flight models 35,36 can achieve satisfactory control performance using DOBC technique. Some successful DOB anti-disturbance results have also been developed to compensate those complex exogenous disturbances existed in HFV models. 16 –19 Using typical T-S fuzzy models, a DOB-mixed H2/H∞ robust fuzzy tracking control method was designed by Wu et al. 17 In the study by Sun et al., 18 a nonlinear integral sliding mode DOBC was proposed to implement dynamic tracking of velocity and altitude for an HV in finite time. Yang et al. 19 proposed an effective nonlinear DOBC method and solved the robust control problem for a generic air-breathing hypersonic vehicle under the framework of mismatched disturbances. However, in these existed results, the unknown disturbances are usually assumed to be represented by those simple linear models. Some more complex nonlinear disturbances, for example, instantaneous impulse perturbations and irregular harmonic signals existed in HFV models, cannot be fully estimated and compensated. So, it is very necessary to explore some novel tools to model those complex nonlinear disturbances.
In this brief, a DOB L1 robust tracking control algorithm is developed to track a desired trajectory for the longitudinal dynamics of HFV models with unknown nonlinear disturbances. By introducing the framework of T-S disturbance modeling, more complicated nonlinear disturbances in HFV systems can be considered by comparing with previous involved harmonic or constant disturbances. Then, by integrating the DO with the simple PI controlled structure via a disturbance compensation term, a composite controller is designed such that the stability of HFVs can be ensured and the tracking error for velocity and altitude can converge to zero. For further boosting the system robustness, the typical L1 index 21 is applied to optimize the dynamical performance and weaken the influences of those unmodeled disturbances. By combining convex optimization theory with Lyapunov analysis process, not only the satisfactory estimation and attenuation performance for disturbances but also the good tracking control precision can be achieved for the longitudinal models with different types of irregular disturbances, which embodies a significative improvement compared with those existing DOB anti-disturbance control algorithms (see Sun et al., 18 Yang et al., 19,29 Guo and Cao, 20 Cao et al., 30 Yi et al., 31,32 Li et al., 33 and Yao and Guo 34 ). Finally, different exogenous disturbances are considered in an HFV simulation model and the relevant results can reflect the effectiveness and feasibility of the controlled algorithm.
Notation. Throughout this article, the zero and identity matrices are described by 0 and I, respectively. The symbol sym is defined as
Description of HFV model
Simulation model
Similar to the results obtained by Xu and Shi, 3 Xu et al., 4 and Bilimoria and Schmidt 6 and others, the simulation model for simplified longitudinal dynamics of an HFV is described by five differential equations

where V, γ, α, q, and h represent velocity, flight path angle, altitude, pitch rate of the HFVs, and angle of attack, respectively. The parameters μ, Iyy, m, and r stand for gravitational constant, moment of inertia, mass, and radial distance from Earth’s center, respectively. The parameters T, L, D, and Myy are the thrust, lift, drag, and pitching moment, expressed by

with

where CL, CD, and CT are lift, drag coefficient relating to angle of attack, and thrust coefficient correlation with throttle device, respectively. CM(α), CM(q), and CM(δe) denote moment coefficient, pitch rate, and elevator deflection, respectively. The parameters s, ρ, RE, and
Control-oriented model with T-S disturbance modeling
To facilitate the process of the controller design, it is a common practice to linearize the preceding nonlinear models (1) to (3); see Fidan et al.,
1
Bilimoria and Schmidt,
6
and Buschek and Calise
7
for details). By defining

It is noted that system matrices A, B, C, and H can be computed in specific flight conditions (the Mach number and the altitude) using Taylor expansion. Furthermore, the complex atmospheric environment such as turbulence and wind gust are included and the HFV model (4) can be generalized to

where d1(t) and d2(t) represent two kinds of unknown disturbances. Moreover, d2(t) is assumed to be norm bounded, while d1(t) in controlled input channel is supposed to be formulated by typical T-S fuzzy system with r rules (see Wu et al., 16,17 Yi et al., 35,39 Fan et al., 36 and Zhang et al. 37,38 )
Plant rule j: If θ1 is μ1j, θ2 is μ2j, and…and θn is μnj, then

where Wj and Vj are designed coefficient matrices. θi and
It is noted that using the model blend, the global T-S dynamical model (6) can be reexpressed as

where

and

for any θ. Therefore,

for any θ.
Design of controlled input with disturbance observer
Based on the abovementioned control-oriented HFV models with modeled and unmodeled disturbances (5), a new augmented variable is described as

In equation (9), the expression

with

On one hand, a nonlinear DO based on T-S disturbance model (7) is applied to estimate unknown disturbances d1(t), described as

where J is the designed observer gain to be computed later. v(t) stands for the auxiliary variable.
Define

On the other hand, in order to optimize the dynamical tracking performance for the interference term
Furthermore, by combining the PI feedback control structure with the dynamical estimates of modelled disturbances, the overall controller is constructed as

Substituting the controlled input equation (13) into equation (10), the closed-loop augmented model is expressed by

In the following, we aim to computer appropriate controller gain K and observer gain J such that both the above involved closed-loop model (14) and error system (12) are stable, and the dynamical tracking error is ensured to converge to zero.
Remark 1
The interference term
Remark 2
It is noted that PI-type controller
L1 robust anti-disturbance dynamical tracking performance
In this section, the following theorem is given using classical convex optimization theory.
Theorem 1
For known parameters γ1 > 0, μi > 0, i = 1, 2, ηi > 0, i = 1, 2, 3, if there exist some constant matrices

and

and
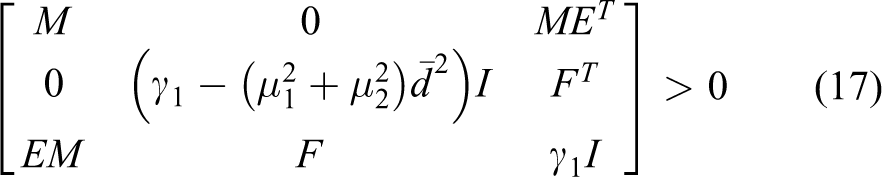
are solvable with constraint condition
Proof. Select Lyapunov functions as

Based on equations (12) and (14), we have

where μ1 and μ2 are two designed positive constants,


If LMIs (15) to (17) hold, there exists a constant η3 > 0, relying on the matrices

By multiplying the positive definite diagonal matrix
where
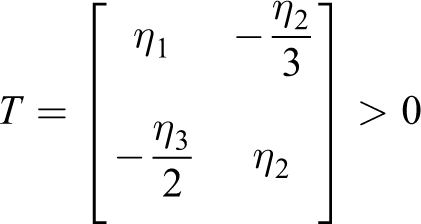
can be satisfied with constraint condition. Thus,

where ρ0 represents the initial condition of vector ρ(t), which also proves both closed-loop model (14) and error system (12) are stable.
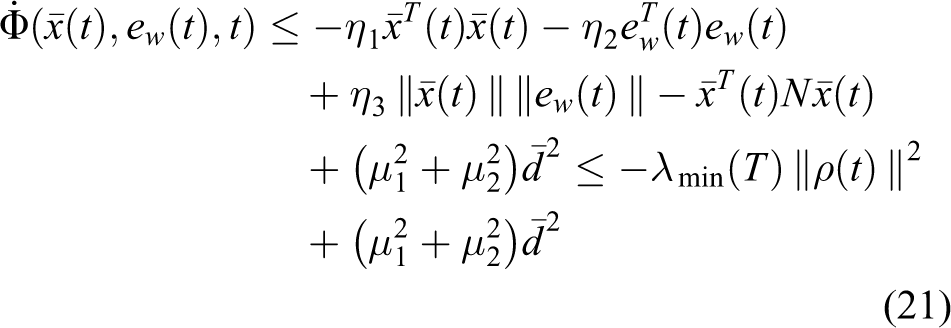
As follows, we will discuss L1 disturbance attenuation performance for
From equation (17), we have

So

Hence, the L1 performance index of the augmented system is less than γ1, that is,
Furthermore, we will discuss dynamical tracking control problem of closed-loop system. Assume that φi(t) and

and

By selecting the similar Lyapunov function

Along with the trajectories of equations (25) and (26), we have

So the closed-loop systems (25) and (26) can be verified as asymptotically stable and the convergence of states satisfy
Remark 3
The above theorem provides an effective algorithm in analyzing the robust performance of HFV models. It is noted that the structures of each matrices (15) to (17) are quite conventional, and their dimension is also not high. In this study, each LMIs (15) to (17) can be solved using MATLAB LMI Toolbox. The matrices Q1, P2, M, and R1 can also be easily computed by solving (15) to (17). Furthermore, the control gain K and the observer gain J can be determined via
Numerical illustrations
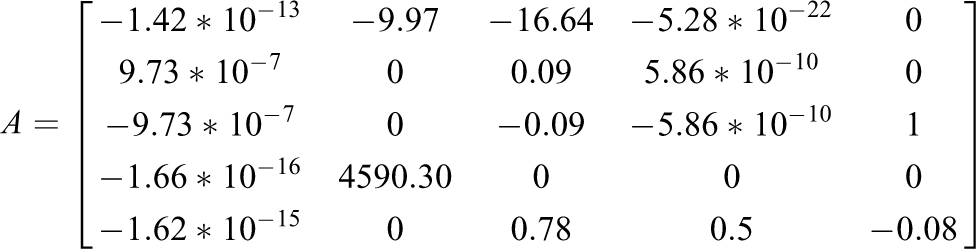
In order to illustrate the validity of controlled algorithm for HFV model, the longitudinal HFV is implemented and tested using Matlab simulation software. In this section, the longitudinal flight control of HFV is assumed at a Mach number of 15. The dynamical simulation example is defined at a trimmed condition of V0 = 4590.3 m/s, γ0 = 0 deg, α0 = 0, h0 = 33528 m, q0 = 0 deg/s, δe0 = −0.38 deg and β0 = 0.21. Similar to the work done by Fidan et al., 1 Bilimoria and Schmidt, 6 and Buschek and Calise 7 , the linearization HFV system is expressed by

where

In this section, two kinds of complex harmonic disturbances are considered, namely irregular harmonic disturbances and harmonic disturbances with damped signal. It is noted that two irregular disturbances
Plant Rule
Rule 1: If w1 is
Rule 2: If w1 is
where
It is noted that Gaussian membership functions are one of the most commonly used functions in the process of T-S fuzzy modeling. In order to highlight the universality, our motivation is to choose most representative or common functions as fuzzy membership functions in the process of disturbance modeling. As a result, the Gaussian-type fuzzy member functions are selected as

where
Meanwhile, by defining the parameters γ1 = 2, μ1 = 1, μ2 = 1.5, η1 = η2 = η3 = 1, and solving matrix inequalities (15) to (17), the gains K and J are computed as


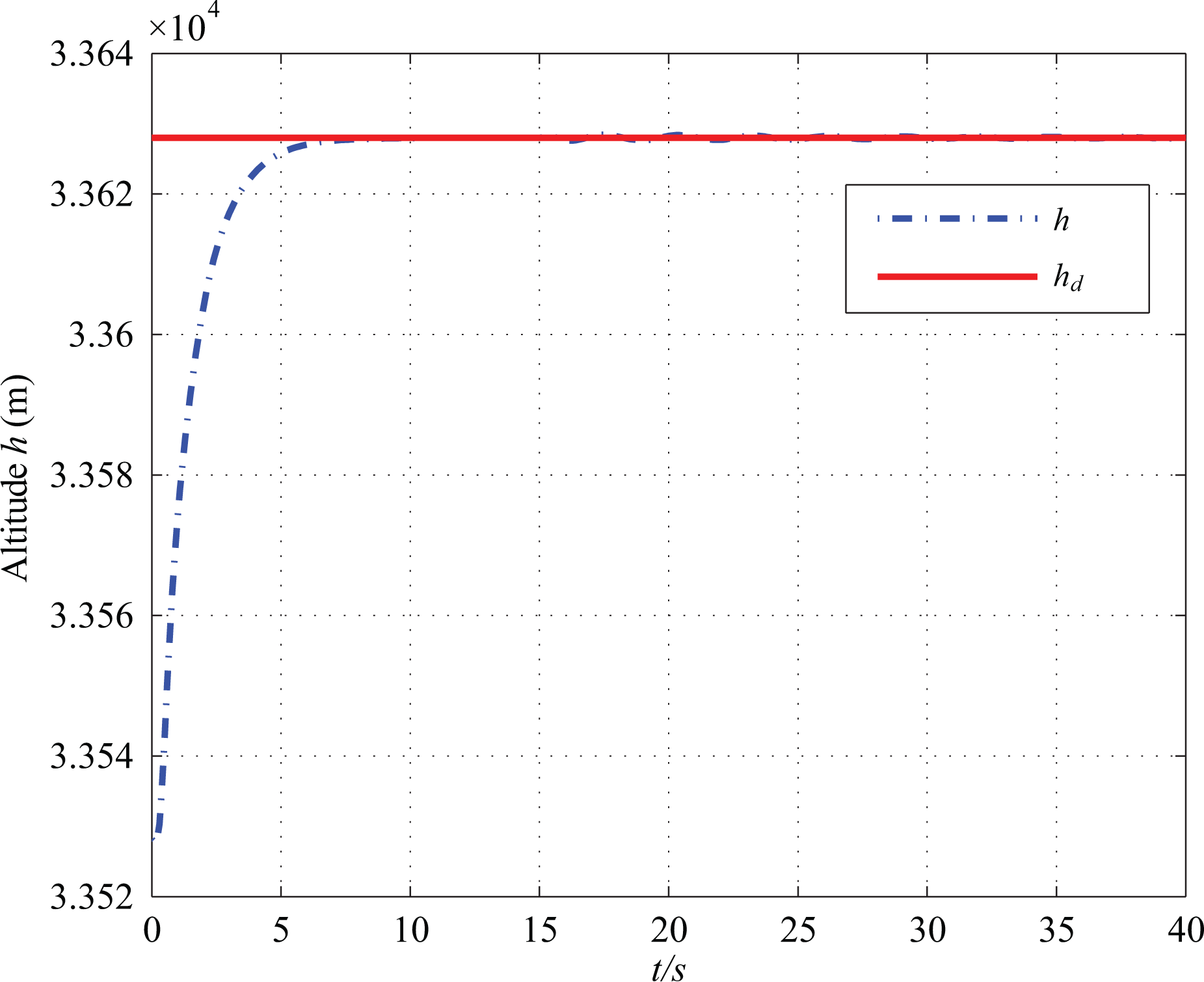
In this section, the velocity and altitude of HFVs are two main tracking objectives, whose desired tracking values are supposed as Vd = 4640 m/s and hd = 33628 m. Figures 1 and 2 show the dynamical responses with a 50-m/s step-velocity and 100-m step-altitude, which embodies that the good dynamical tracking precision can be achieved by comparing with the desired values. Figures 3
to 5 display the trajectories of flight path angle γ, angle of attack α, and pitch rate q, respectively, which further illustrates that the system ability is satisfactory. Two irregular harmonic disturbances d11(t) and d12(t) and their observation values

Responses of velocity V and its desired value Vd.

Responses of altitude h and its desired value hd.

Responses of flight path angle γ.
Responses of angle of attack α.

Responses of pitch rate q.

Responses of d11(t) and its estimate

Responses of d12(t) and its estimate

Responses of V with and without DO.
Conclusion
In this brief, we have studied an effective anti-disturbance tracking control scheme for the longitudinal dynamics of a generic HFV system. A T-S fuzzy model together with DO has been applied to depict those modelled disturbances. Moreover, a DOB PI-type composite control input has been designed based on HFV models in order to realize those control requirements, including dynamical tracking, stability of controlled systems, L1 disturbance attenuation, and disturbance compensation performance. The detailed theoretical analysis can be given using convex optimization theory. Furthermore, the importance and effectiveness of the proposed scheme has been validated by simulation results for the HFV model with unknown irregular nonlinear disturbances.
It is noted that the dynamics of HFV model are simplified as a linearized longitudinal system at a fixed trimmed condition, which largely restricts the range of application of HFV model. The more complex HFV model subject to unknown nonlinear terms and unknown disturbances will be discussed as future-related topics.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Key Project of Chinese National Programs for Fundamental Research and Development (973 program) under grant 2012CB720003 and the National Nature Science Foundation of China under grants 61473249 and 61573307.