
Abstract
For a class of multi-input multi-output nonlinear systems, a disturbance observer-based control is proposed to solve the tracking problem in the presence of mismatched disturbances. By designing a novel compensation gain matrix, the disturbances can be removed from the output channel completely as well as retaining the nominal performance. Compared with the state of the art, the gain matrix reduces to be constant; therefore, the complexity of the controller is simplified greatly. This method is applied to the control of hypersonic flight vehicles to demonstrate its effectiveness.
Introduction
In modern practical control systems, unexpected disturbances occur inevitably due to the external disturbances, unmodelled dynamics and parameter perturbations. 1 –3 Efficient control techniques have been extensively investigated in the literature, such as H2 control, 4 H∞ control, 5 sliding control, 6 adaptive control 7,8 and so on.
However, it should be pointed out that mismatched disturbances (the disturbances are not in the input channel) are more universal in practice. Considering hypersonic flight vehicles (HFVs) for example, the mismatched disturbances caused by the dramatic changes in flight environments may influence the states directly. 9 Recently, the mismatched disturbances problem has been a hot topic. In the study by Zheng et al., 10 a robust tracking controller was proposed for multi-input multi-output (MIMO) nonlinear systems using a variable structure control approach with the mismatched disturbances. In the study by Lin et al., 11 a robust controller was constructed using the sliding mode control (SMC) technique, while the norms of the mismatched disturbances were confined to be bounded. Some researchers attenuated mismatched disturbances by incorporating an integral item into the controller. 12 However, the chattering would increase as the gain of the controller increases.
Most of the previous controllers were robust, focusing on the system stability at the price of control performance. Recently, disturbance observer-based control (DOBC) 13 was introduced to solve the disturbances problem in another way. The core of DOBC is to amend disturbances due to the estimation of the disturbance observer without destroying the original performance. DOBC will work to maintain the nominal performance, when there is no disturbance. The initial applications of DOBC focused on the matched disturbances, which could be eliminated directly by the state feedback. The mismatched disturbances attenuation approaches were proposed for linear systems. 14,15 Some results about sliding control made advances to eliminate the disturbances effectively by incorporating the disturbances estimation into dynamic surfaces 16 –18 for nonlinear systems, but the researches concentrated on single input single output nonlinear systems. However, the mismatched disturbances attenuation of MIMO nonlinear systems is still a challenge in present research. Literature 19 proposed a feedback control law to remove the disturbances by solving ordinary constant equations, but singularity of the solution was inevitable yet. Literature 20 investigated the fault-tolerant control problem for a class of continuous-time Markovian jump systems with the mismatched disturbances. In the study by Yang et al., 21 disturbances were totally removed from output by designing the decoupling gain matrix. In the study by Han et al., 22 a back-stepping controller was designed to acquire exact tracking for a class of uncertain systems in the presence of the mismatched disturbances. Continuous-time model predictive control combined with DOBC was proposed to guarantee the desired offset-free tracking performance for a class of nonlinear systems. 23
Inspired by the previous works, a tracking controller is proposed to counteract the mismatched disturbances for feedback linearizable nonlinear systems. By designing a proper compensation gain matrix, the disturbances can be removed in the output channel completely. The disturbance observers are designed for every subsystem of the original system, such that the gain compensating matrix reduces to a constant one. The gain matrix of the previous result 21 was more complicated, which involved Lie derivative computation of the nonlinear system dynamics. Therefore, less information of the nonlinear system is required and the controller complexity is reduced subsequently. In addition, the proposed method keeps the nominal performance recovery while it can compensate for the effect of the disturbances at the same time.
The proposed method is applied to velocity and altitude tracking of an HFV model undergoing mismatched disturbances. The HFV has been widely applied to the commercial use and military demands for its outstanding flight performance. However, for its complicated dynamics, the longitudinal motion of HFV is the only mature part of HFV. 24 Many powerful controllers have been studied for models of HFV, such as adaptive control, 25 sliding control, 26 back-stepping control 27 and intelligent control. 28 The emphasis of the research is to weaken the uncertainty and disturbances of the HFV system. Literature 29 summarized the powerful techniques and challenges for the common models of HFVs. A novel dynamic surface control was applied to develop two global neural controllers for HFVs with unknown dynamics. 30 A robust control was proposed for a generic hypersonic aircraft using command filter to simplify the back-stepping design in the study by Xu et al. 31 An et al. 32 designed an auxiliary system to counteract the mismatched disturbances for regulating control of air-breathing hypersonic vehicles subject to constrained inputs. Besides, the large flight envelope and the tremendous changes of flight environment lead to the external disturbances. Thus, it is very necessary to design the controllers which can decrease the effect of the disturbances and retain the nominal stability.
The main contributions of our work are as follows: The compensation gain matrix is a constant one, which simplifies the structure of the controller. The proposed controller possesses the ability to recover the nominal performance. The influence of mismatched disturbances can be completely compensated in the output channel.
The rest of the article is organized as follows. In ‘Problem formulation and preliminaries’ section, the main problem and some preliminaries are stated. In ‘The tracking control design’ section, the tracking controller is provided along with its stability analysis. In ‘Application to the control of HFVs’ section, the proposed method is applied to the HFVs and simulation results are presented. This article is finally concluded in the last section.
Problem formulation and preliminaries
Problem formulation
Consider an MIMO feedback linearizable nonlinear system with lumped disturbance represented as
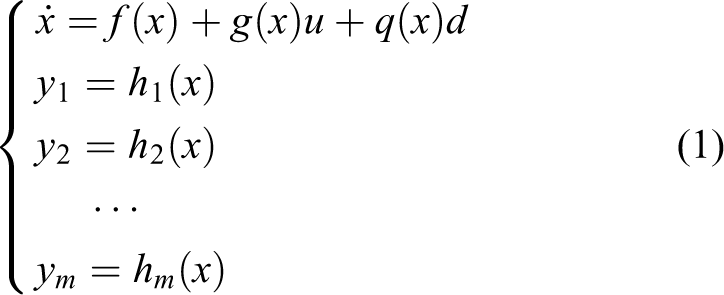
where
For functions
Assumption 1
The nominal system of equation (1) is satisfied with exact linearization condition
33,34
that the sum of the relative degree of
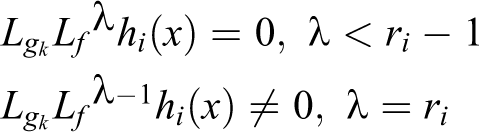
then, the relative degree of output hi is ri.
By the definition of the relative degree of system (1), a new vector can be designed as

where
To be specific, output hi corresponds to a linear subsystem Ξi. 33 The coordinate transformations are defined as

where
Under coordinates (3), the dynamics of subsystem Ξi is described as

where
Moreover, the subsystem disturbance vector
Assumption 2
The full states are available for measurement or known. This assumption is necessary for the state feedback control. The states can be acquired by the sensors or observers.
Assumption 3
The derivatives of the disturbances are bounded. This assumption is a general assumption for the disturbance estimation.
Assumption 4
The disturbances in equation (1) are satisfied with
The nonlinear disturbance observer
The nonlinear disturbance observer for the disturbance in equation (1) was introduced by Chen et al., 35 designed as

where

Applying equation (1) into equation (5), dynamics of estimation error

Lemma 1 (Chen and Guo 36 )
Suppose that the disturbance d is bounded, the disturbance estimation error system of (5) is locally input-to-state stable, if the appropriate observer gain

is asymptotically stable for all
In this article, we propose an output tracking control scheme for equation (1) in the presence of the mismatched disturbances via feedback linearization and nonlinear disturbance observer.
The tracking control design
The proposed tracking control scheme for system (1) will compensate for the mismatched disturbances in the output channel by designing a proper gain matrix. The specific controller is described in theorem 1.
Theorem 1
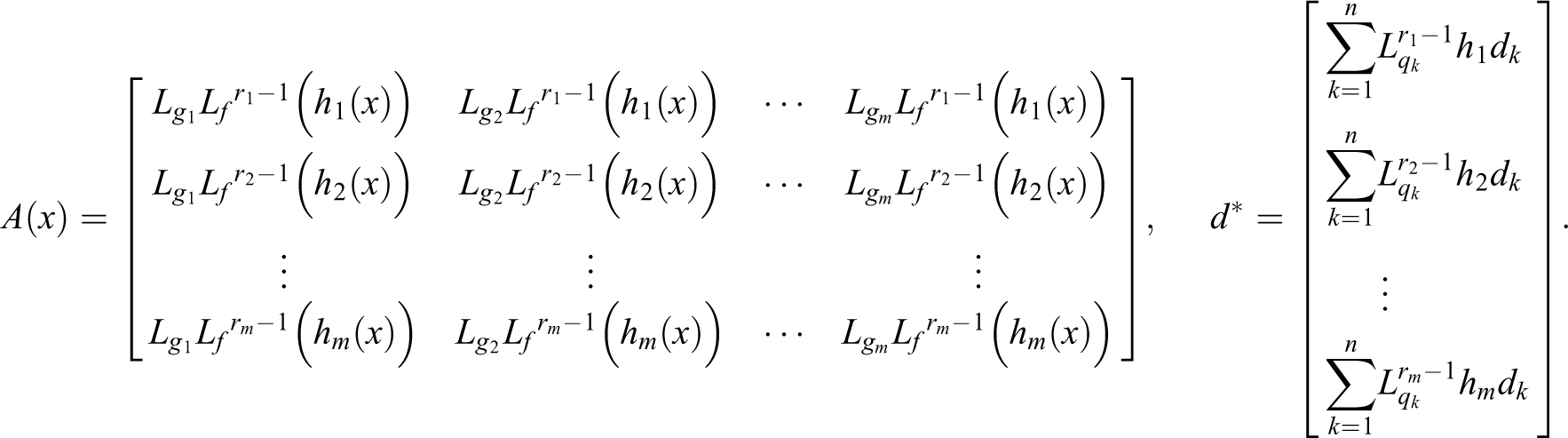
Consider MIMO nonlinear control system (1) with assumptions 1–4 satisfied. The disturbance observer (5) is assumed to guarantee the tracking error asymptotically stable. The proposed control scheme which compensates effect of the disturbances in the output and tracks the desired trajectory

where

where hid is the desired output of hi and parameter

Hurwitz stable. The disturbances compensation
Proof
A new vector

Substituting equation (6) to equation (7), the closed-loop system equation is obtained

Correspondently, subsystem Ξi is depicted as

By translational transformation, equation (9) is described as

Equation (10) is rewritten in the matrix form

where
By simple calculation, it can be concluded from equation (11) that

Employing

Equation (13) demonstrates that the disturbances are removed in the output channel by the gain matrix Di. The tracking error system (11) has a steady state that is

By lemma 1 and assumption 4, the observer gain

We can conclude that output hi will track the desired trajectory hid locally in the sense of input state stability. □
Remark 1
The superiority of gain matrix Di here is constant, which reduces the overall design complexity greatly and enhances the robustness.
Remark 2
The gain matrix Di is determined by the nominal controller. Moreover, the separation of gain matrix and state is beneficial to the steady state.
Application to the control of HFVs
This section takes the velocity and attitude tracking of HFVs as an example to show the effectiveness of our proposed method. Based on the model of the study by Marrison and Stengel, 37 the longitudinal motion of HFVs with the mismatched disturbances can be written in the form of equation (1) as follows

with

where

where
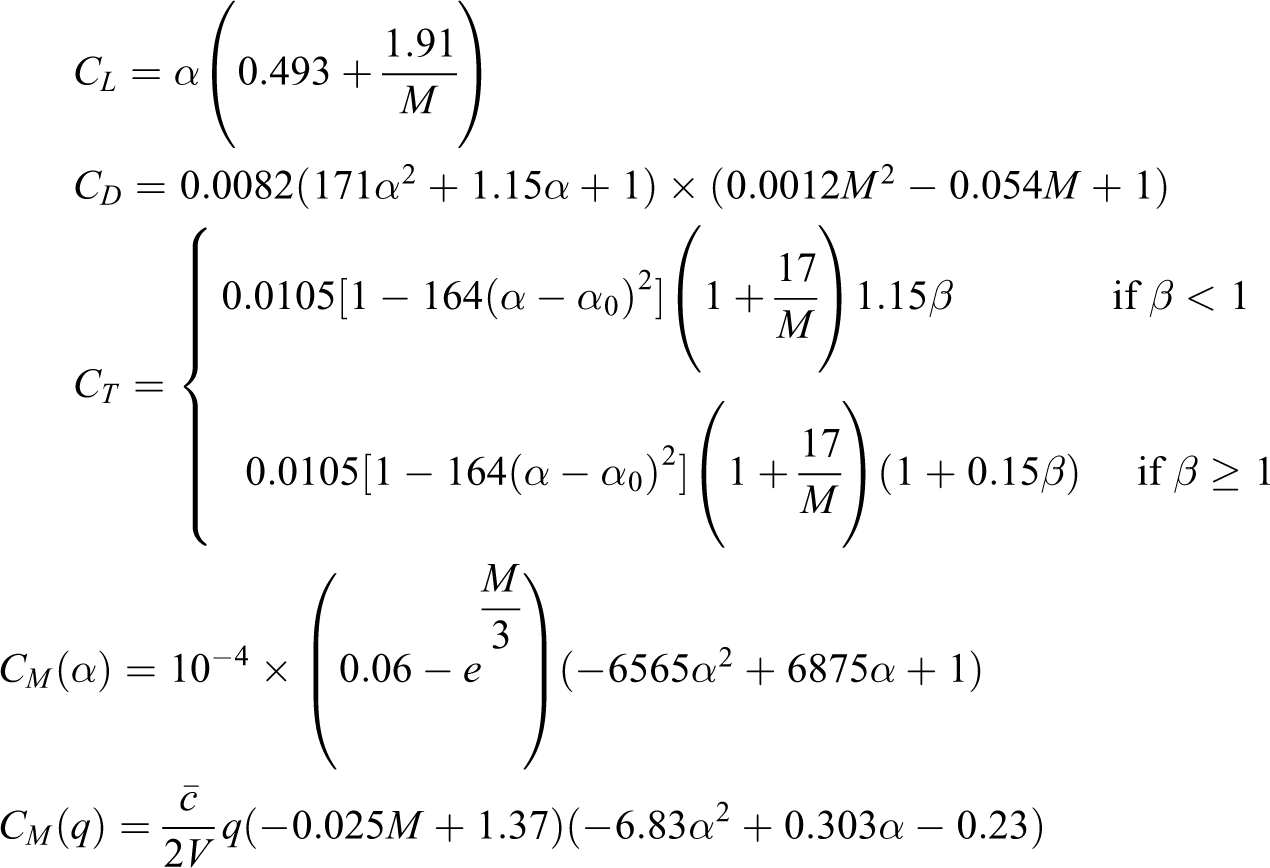
The details and meanings of other notations can be found in the study by Marrison and Stengel. 37
By calculations, the relative degrees of output V and h are three and four, separately. We differentiate V three times and h four times. Therefore, the HFV model (15) can be separated into two subsystems. Subsystem Ξ1 is related to the output V and subsystem Ξ2 is related to the output h. Correspondingly, the coordinate transformations of two subsystems are described as

which are defined as follows

Under the coordinate transformations (16), subsystems Ξ1 and Ξ2 can be represented as

According to equation (6), the controller for equation (15) is designed as

where
By coordinate transformations (16), we obtain the nominal control

where

The disturbances compensation
Disturbances estimation

Supposing the HFV is cruising at h 0 = 110,000 ft and V 0 = 15,060 ft/s. The control objective is to let the vehicle climb Δh = 1000 ft with the velocity increasing about ΔV = 400 ft/s. The altitude and velocity references, that is, hd and Vd, are generated by the following command filter

where ξ = 0.9 and ω = 0.1 rad/s. The parameters in aerodynamic coefficients of lift, drag, thrust and pitch moment are randomly selected with relative uncertainties up to 20%. That is to say, for a parameter with a nominal value P0, the actual value in simulation is selected as

where T and D are the thrust and drag calculated according to the nominal parameters; ΔT and ΔD are the differences between the actual and nominal values of thrust and drag; d1 is the resulting disturbance with the expression of
Simulation results are shown in Figures 1
–8. We can see that our proposed controller (referred to as ‘NDOBC’ in Figures 1
–4) can well track the references. However, the so-called baseline controller

Velocity tracking.
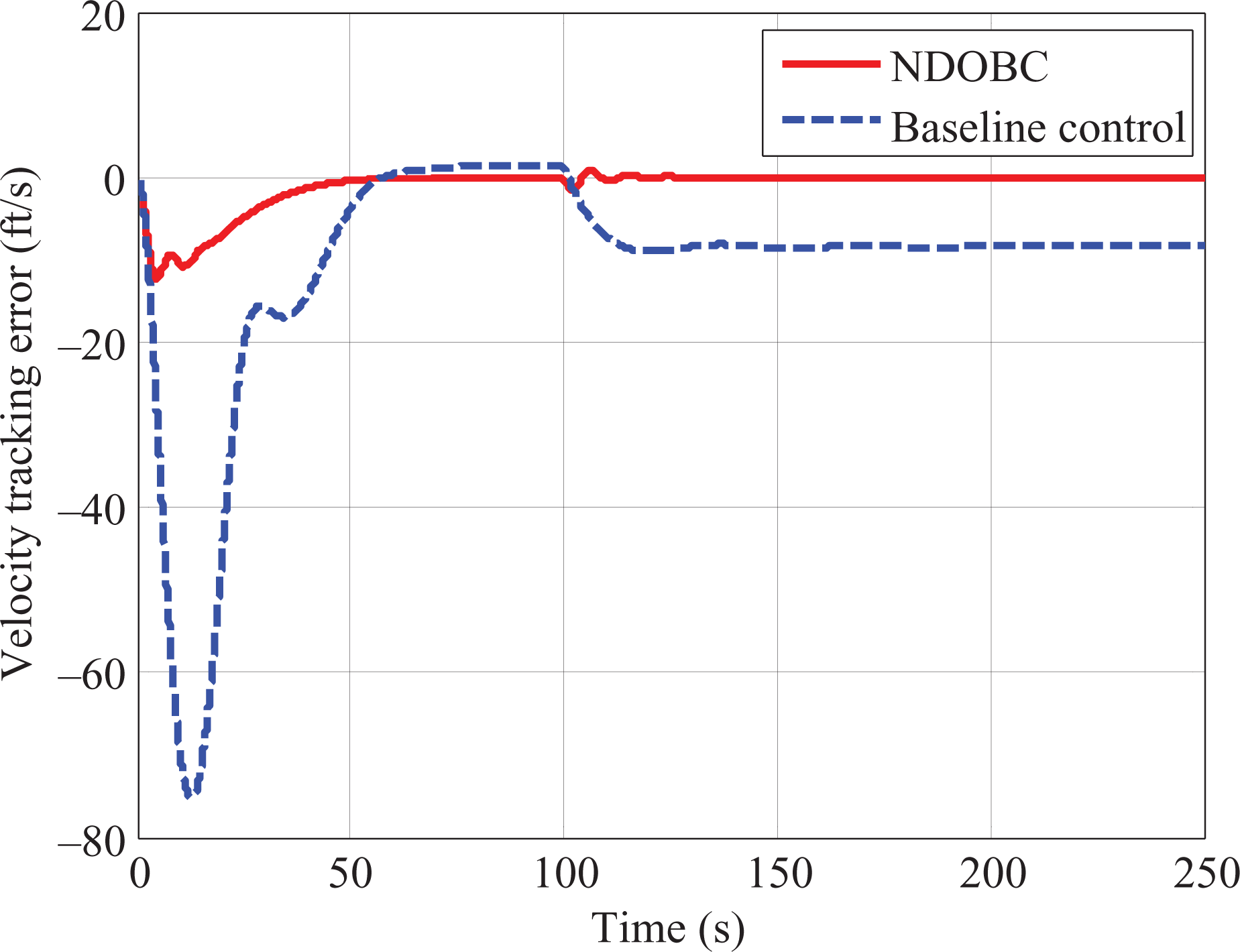
Velocity tracking error.

Altitude tracking.
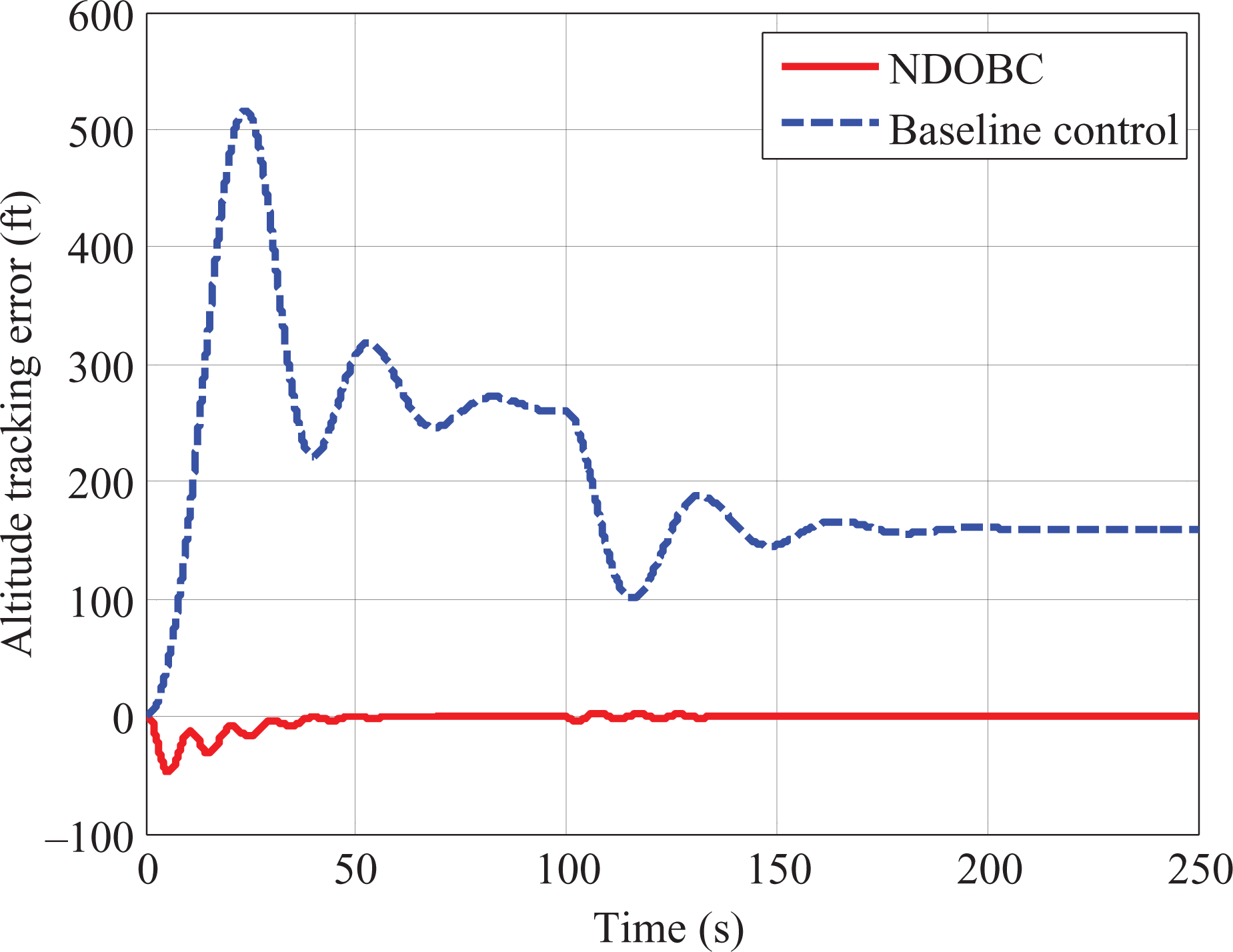
Altitude tracking error.

Elevator defection.
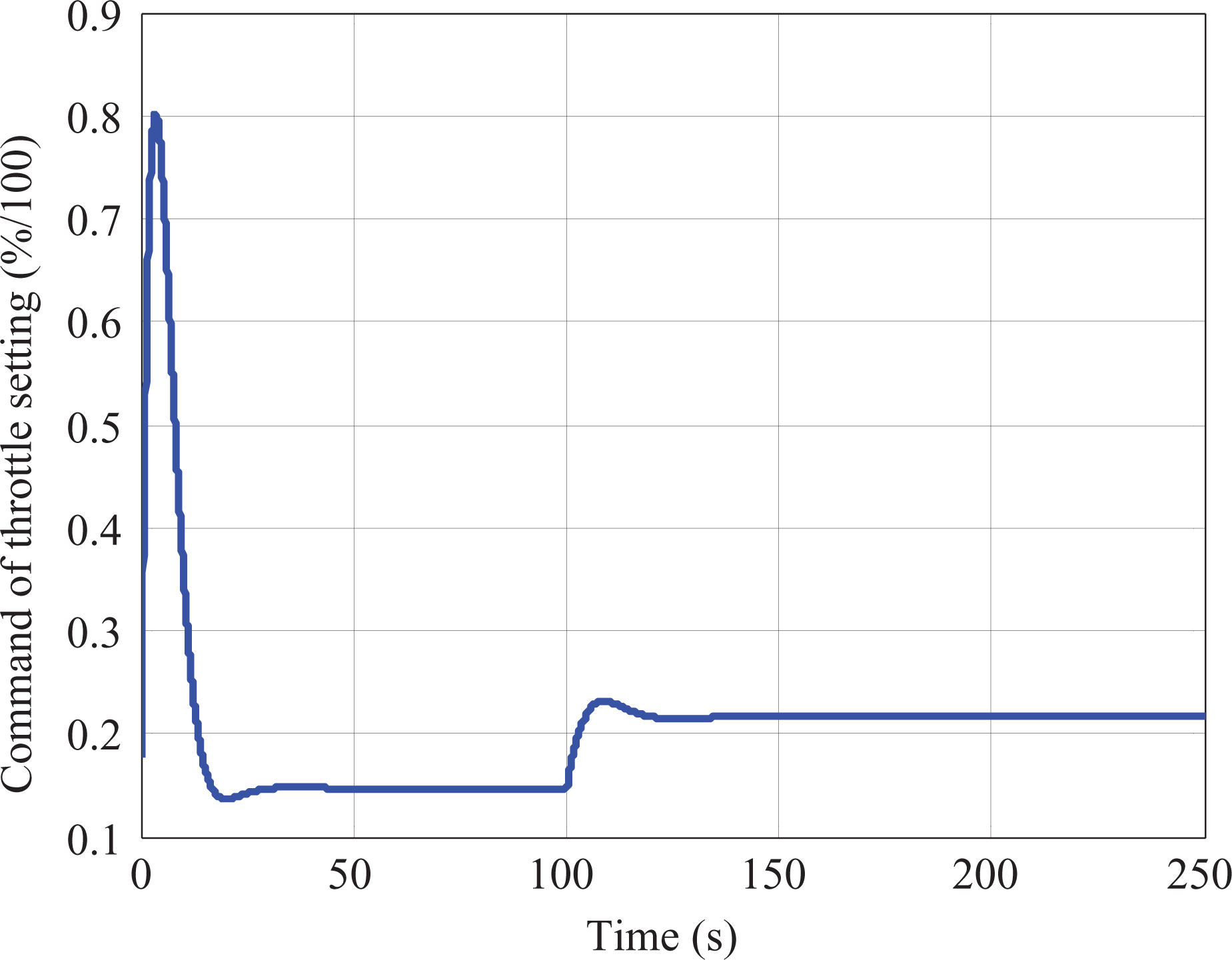
Command of throttle setting.

Angle of attack.

Pitch rate.
Conclusion
A tracking controller based on DOBC is proposed for a class of MIMO systems with mismatched disturbances. The nonlinear disturbance observer can estimate the mismatched disturbances effectively without adding extra complexity to the controller. The proposed controller inherits the merit of DOBC, that is, the ability to maintain the nominal performance and strong robustness. As one highlight of our work, the proposed controller has a simpler structure compared with the resulting papers. The compensation gain matrix reduces to be constant by the proper observer design. An application to the HFV shows the ability of this method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.