
Abstract
In this article, the disturbance observer–based control is designed for a flexible hypersonic flight vehicle with the external disturbance. The aircraft structure is easy to cause elastic vibration, thus leading to serious change in structural configuration or even disintegration. Therefore, the impact of elasticity modal for altitude subsystem is described as a system disturbance, and then, the equivalent model is established. On this basis, considering the model structure and composition of nonlinear systems, the disturbance observer is used to eliminate the information of the disturbance. Finally, the simulation results make an offer to show that the disturbance observer–based control can provide a good tracking performance.
Introduction
Hypersonic flight vehicles (HFVs) have great potential applications both in military and civil industries, it involves two fields: aeronautics and astronautics. These technologies are the more efficient for space access and global-response capabilities. 1 HFV means that the speed is five times more than that of sound. The light structure and slender geometry make the vehicle to be considered as a flexible structure. Furthermore, flexible coupling items bring many challenges for HFV control. Moreover, the wide range of speed during operation, intricate coupling between the engine and flight dynamics, and the lack of a broad flight dynamic database introduce significant variations of plant parameters and uncertainties of the control problems. 2
Recently, the control for HFV is extremely concerned and many modern control methods are applied to HFV control system. The paper 3 decomposes the generic HFV into velocity subsystem and altitude subsystem. Heller et al. 4 designed the longitudinal robust controller using dynamic inverse to ensure the stable flight characteristics and good control performance. Wang and Stengel 5 used the genetic algorithm in HFV nonlinear dynamic inversion control to find the nonlinear dynamic inversion parameter space. For the uncertainties in the dynamics, the article 6,7 uses the neural networks that approximate the uncertainties. In order to eliminate the influence of flight parameter variations and external disturbances, some researchers design the sliding mode controller. 8,9 For the problem of actuator fault, the minimal learning parameter technique is used to reduce the online updating burden in the dynamics approximated by neural networks. 10 In addition, the elastic vibration is very prone shown during flight because the HFV uses the lightweight materials. 11 When the dynamic characteristics of elastic mode are known, the document 12 designs the sliding mode controller using balanced small perturbation linearization to achieve control objectives. However, it is difficult for nonlinear model to ensure high reliability and adaptability in the control system.
In practice, the unknown external disturbances 13 –16 have a great influence on systems. The linear parameter-varying systems with a matched disturbance and input saturation have been studied in the literature. 13 In the study of Nguyen and Jabbari, 14 the linear systems are studied in output feedback controllers with constraints on inputs distance. Also, for nonlinear systems, the sliding mode controller is used, 15 and the measurement feedback with internal stability is a solution of disturbance attenuation. 16 Recently, the control of disturbance observer is obtaining more attention. Largely, the observer can estimate the influence of uncertainties. The study of Xu et al. 17 gives us a new approach on disturbance observer for the external disturbance problem in the class of uncertain nonlinear systems. With the disturbance attenuation problem for the multi-input-multi-output (MIMO) nonlinear system, the article 18 designs a generalized nonlinear disturbance observer–based control (DOBC). In the study of Chen and Ge, 19 using the neural networks and disturbance observer, the output feedback and state feedback controls are designed for uncertain nonlinear system.
Numerous control methods have been designed with the elasticity systems, 20,21 single-input-single-output pure-feedback system, MIMO uncertain and perturbed system, 22 and strict-feedback system. 7,23,24 For this article, we present the strict-feedback systems formulation of the longitudinal dynamics into altitude and velocity subsystem in reference to HFV control. The dynamic surface control (DSC) method is used in altitude subsystem, the virtual controller is designed at each step, and the virtual control is adopted by a first-order filter to solve the complexity explosion. We initiate the DOBC of the flexible HFV with the external disturbances. The external disturbance and the flexible coupling effect are considered as a compounded disturbance. The global uniformly bounded stability is proved by Lyapunov approach.
The article is organized as follows. The longitudinal dynamics of the flexible HFV is described in second section. In the third section, the equivalent disturbance model is obtained by system transformation. In the fourth section, the DSC with disturbance observer and the stability analysis are presented. Fifth section presents the simulation result. And the final section gives the conclusion.
The HFV modeling
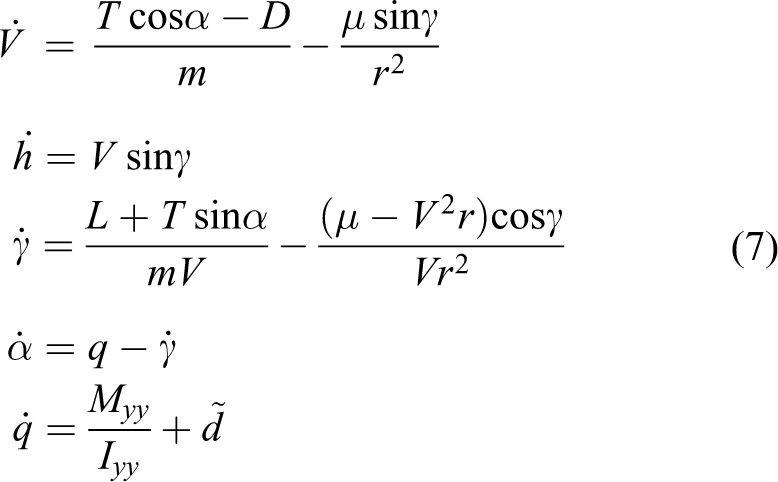
In order to achieve the speed command and altitude instruction trace, the control system is mainly related to engine throttle and elevator deflection angle. We take this flexible model into the longitudinal dynamics 25






It comprised of five states
where
Remark 1
In the above flexible model, the flexible variables η1,
System transformation
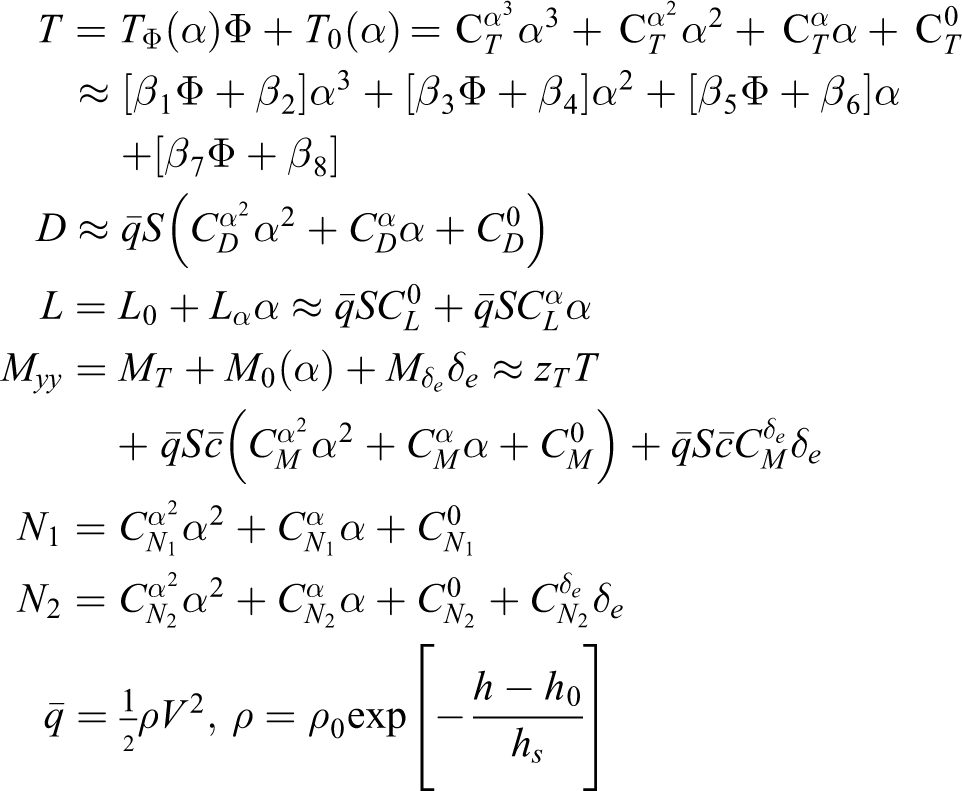
Owing to the effects of the flexible states, it is difficult to process the coupling effect on the rigid and elastic bodies. So, we consider the flexible portion as a disturbance in the model and eliminate the elasticity effect using the disturbance observer. The flexible model (equations (1) to (6)) is approximated as
where
According to equations (1) to (6), the fuel equivalence Φ influences the velocity V, and the elevator angular deflection δe mainly affects the altitude h. The flexible model (equation (7)) can be decomposed into the velocity and altitude subsystem. 26
So, we have the velocity subsystem 6


where
For the velocity subsystem, define the velocity error

The dynamic inverse control signal Φ is designed as

Assumption 1
Because γ is small, we can use sinγ ≈ γ in equation (2) for simplification. In equation (3), the thrust term T sinα is much smaller than L, so it can be neglected.
In the altitude subsystems (2) to (6), the tracking error is defined as

where kh > 0 and kI > 0 are chosen to follow γd.
Define

where
Assumption 2
The control gain function fi is unknown, and there exists nominal value fiN such that fiN < fi, i = 1, 2, 3. The control gain function
The altitude subsystem can be formulated as

where
Control design
Control for the altitude subsystem with disturbance observer
The recursive design procedure contains three steps. We use the DSC method to solve the explosion of complexity. We design the disturbance observer–based virtual control to eliminate the disturbance influence. Step 1. The flight path angle tracking error is defined as

The virtual controller x2d is designed as

where the parameter satisfies the condition k1 > 0.
Let us design a first-order filter and introduce the new state x2c

where α2 > 0 is the parameter of the positive filter.
Define

where
Define

The estimation of Z1 is proposed as

So, the disturbance observer is designed as

Define


Step 2. The dynamics of path angle tracking error e2 is defined as

The virtual controller x3d is designed as

where the parameter satisfies the condition k2 > 0.
Since f2 = 0 and g2 = 1, the virtual control signal x3d can be rewritten as

Let us design a first-order filter and introduce the new state x3c

where α3 > 0 is the parameter of the positive filter.
Define

Step 3. The dynamics of path angle tracking error e3 is defined as

The control input is designed as

where the parameter satisfies the condition k3 > 0.
So, equation (29) is represented as

where
Define
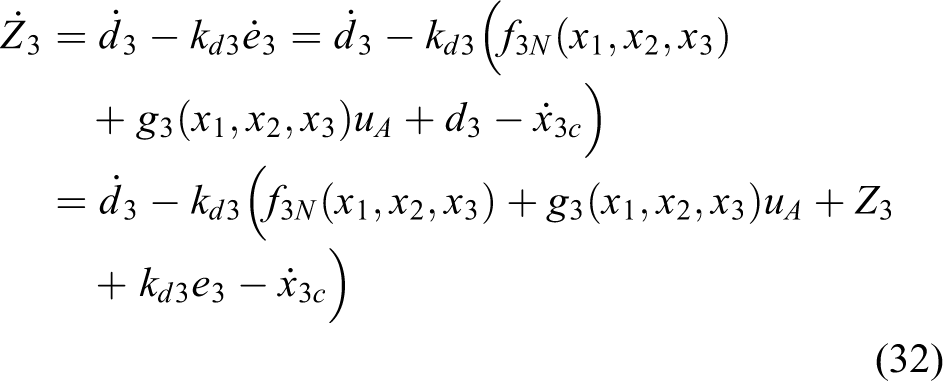
The estimation of Z3 is proposed as

The disturbance observer is designed as

Define


Proof
The following Lyapunov function is considered

where
Take the derivative of L 1, then

where

Take the derivative of L 2, then

where

Take the derivative of L 3, then

where

Finally, we have

when the selecting parameters satisfy the following conditions

Theorem 1
Consider the system (14) with the controller (30) and the disturbance observer (equations (20) and (34)), all the signals involved are semiglobal uniformly ultimately bounded.
Equation (44) can be calculated as

where

Then, from equation (45), we have

From equation (46), we can obtain that as t → ∞,
Simulations results
We verify the effectiveness of the proposed control method in this section, and the illustrated results are as follows. The system initial state of the flexible HFV is V = 7850 ft/s, h = 86, 000 ft, α = 3.5°, γ = 0, and q = 0. The flexible state is set as follows:
where
To show the difference between DSC and the DOBC, the simulation is as follows. For the altitude and velocity tracking, it can be known that the DOBC has better performance than without in Figures 1 and 2. The tracking error approaches zero with the disturbance observer. The controller without disturbance observer cannot be able to track the desired reference very well. For the tracking of system states, the same conclusion is shown in Figures 3 to 5. It shows the response of elevator deflection and fuel equivalence ratio in Figure 6. The reason why the control with disturbance observer has good performance is that the disturbance observer can estimate the equivalent disturbance. The estimated value is shown in Figure 7. For the altitude tracking and velocity tracking, the DOBC can take good performance in tracking the reference signal when the external disturbance is added at 30 s in Figures 8 and 9.
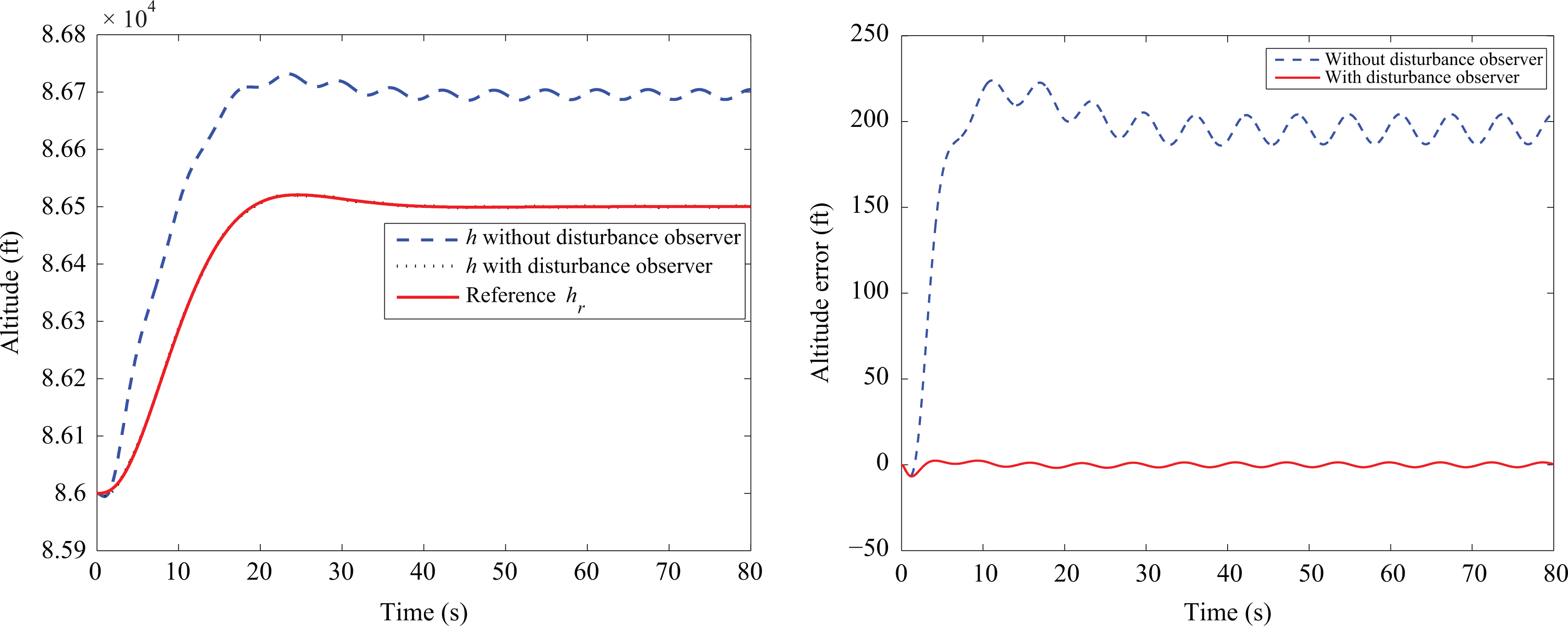
System tracking: altitude tracking (left) and attitude tracking error (right).

System tracking: velocity tracking (left) and velocity tracking error (right).

System states response: flight path angle.

System states response: attack angle.
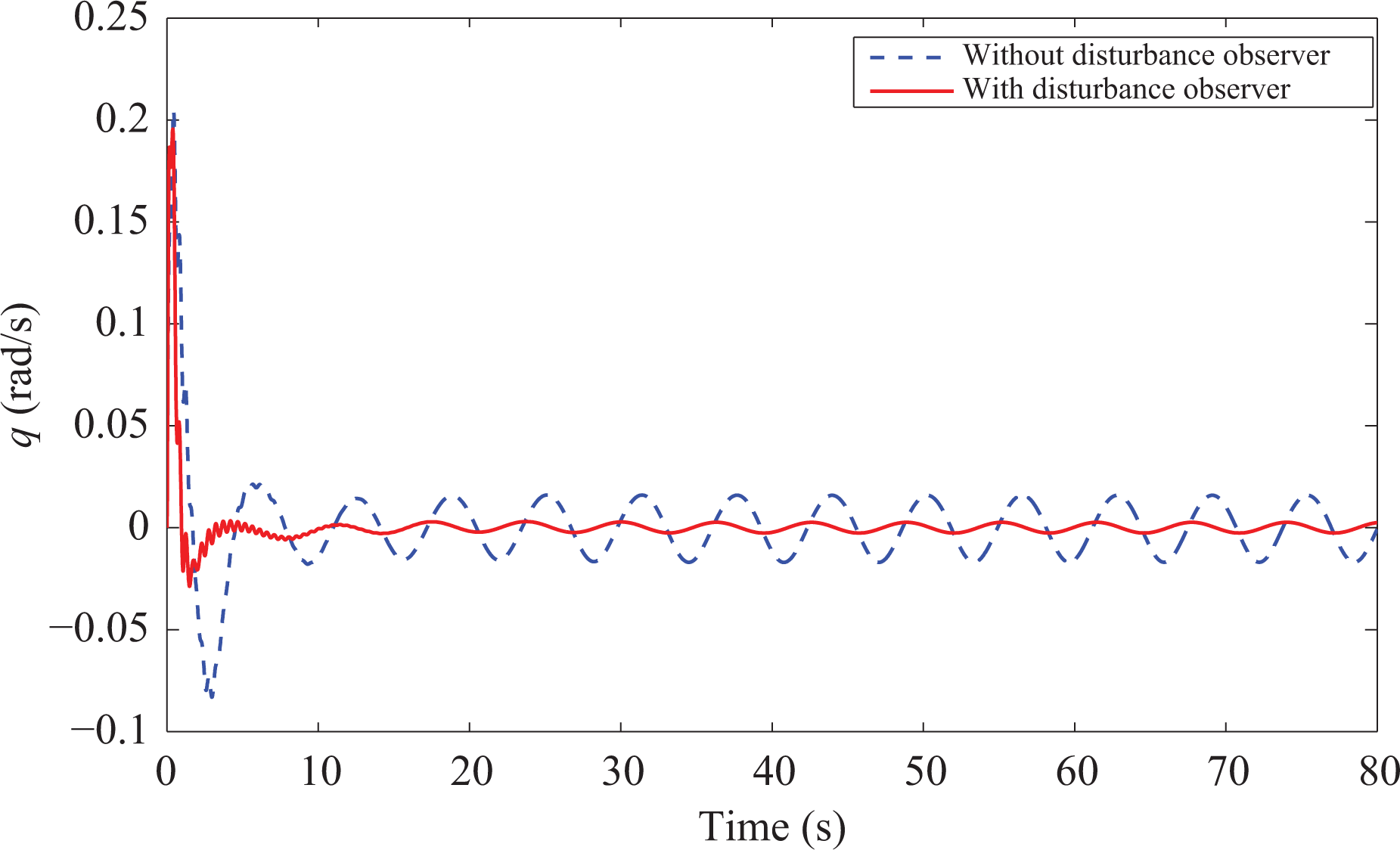
System states response: pith rate.
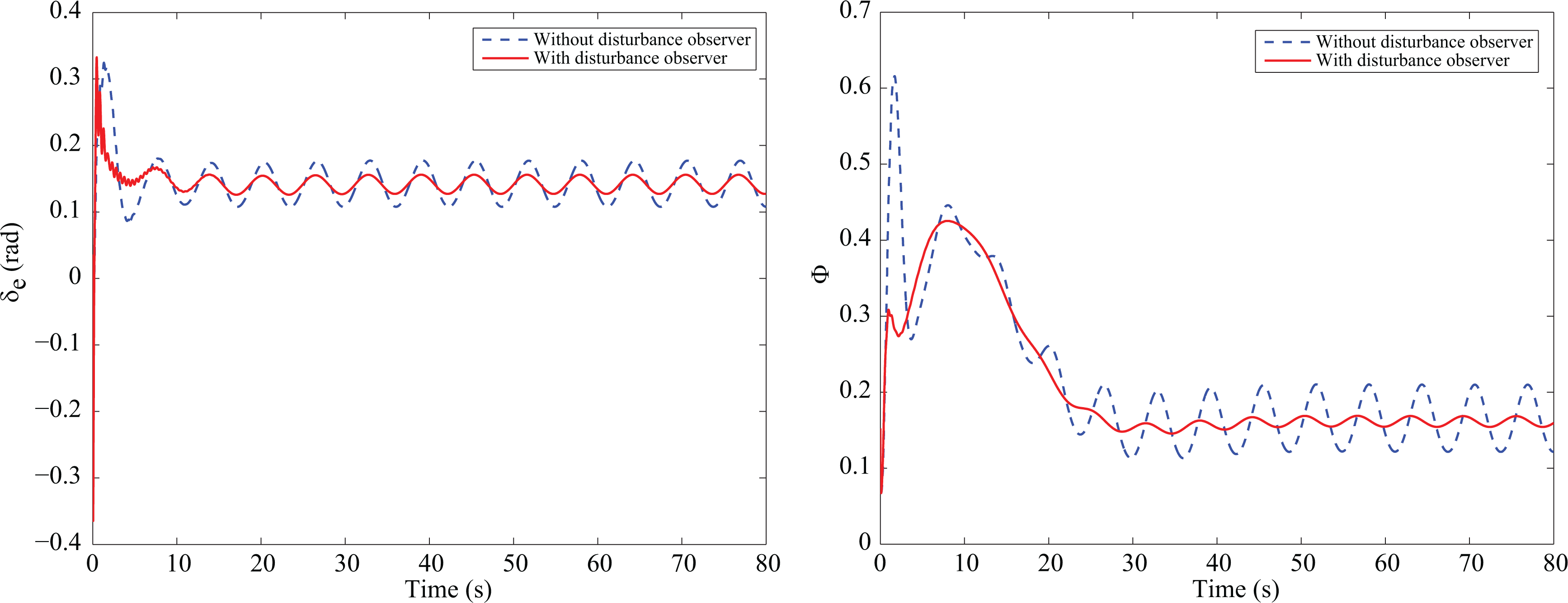
Control input: elevator deflection (left) and fuel equivalence ratio (right).
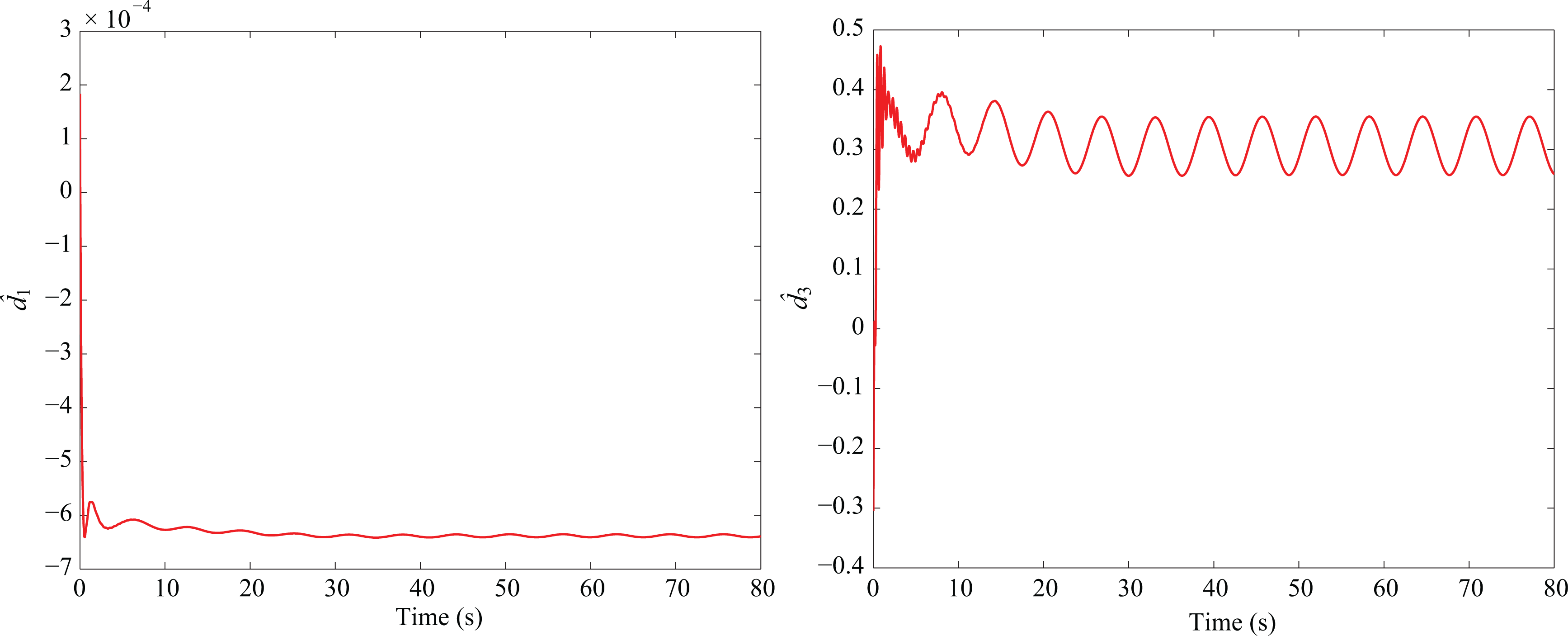
The estimated values:

Altitude tracking with disturbance observer eliminating the external disturbance at 30 s.
Velocity tracking with disturbance observer eliminating the external disturbance at 30 s.
Conclusion and future works
This article considers the DOBC for flexible HFV with the external disturbance. To ensure the robustness and the stability of the control system, the disturbance observer is used to approximate the external disturbance of the system. Finally, the stability is confirmed using Lyapunov method. The simulation result suggests the robustness and effectiveness of the propose control. It can be seen that the tracking error converges to a small size, and we can evaluate the convergence accuracy using some existing works. 27 –29 For future work, we can design the controller to eliminate the uncertainties and external disturbance for better using the neural network and the disturbance observer. And the constrained problem 30 should be further considered for the hypersonic flight control.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (61304098 and 61622308), Aeronautical Science Foundation of China (2015ZA53003), Natural Science Basic Research Plan in Shaanxi Province (2014JQ8326, 2015JM6272, and 2016KJXX-86), and Fundamental Research Funds of Shenzhen Science and Technology Project (JCYJ20160229172341417).