
Abstract
We investigate the dynamic mode of a 3-degree of freedom (DOF) redundantly actuated parallel manipulator by taking the flexible deformation of the limbs into account. The dynamic model is derived using Newton–Euler formulation. Since the number of equations derived from the force and moment equilibrium of the parallel manipulator components is less than the number of unknown variables, the flexible deformation of the limbs is treated as an inequality constraint to find the solution of the dynamic model. The errors of moving platform caused by the flexible deformation of limbs are discussed, and a control strategy is given. To validate the model, the dynamic model is integrated with the control system and compared with the traditional method to minimize the normal driving forces.
Introduction
Over the last decade, parallel robots have received great attention in both theoretical research and practical applications. This attention is due to their superior stiffness, high load to weight ratio, and low inertia over the conventional serial manipulators that are made with rigid-body links and joints connected in serial. Parallel manipulators have wide application in the industrial world; 1,2 for example, flight simulators, 3 parallel kinematics machines, 4 and conveyors for the pretreatment and electrocoating of a vehicle body. 5 However, parallel manipulators have two inherent disadvantages: (i) limited workspace due to the mobility constraints imposed by the other legs in the mechanism and (ii) singular configurations that further reduce the useful workspace. To deal with these drawbacks, several proposals have been presented, among which actuation redundancy is an effective solution. Redundantly actuated parallel manipulators have attracted a lot of interest. 6 –10
To provide high accuracy while performing fast motions, the dynamics modeling must be efficiently formulated in order to meet real-time requirements. There are four main methods to model the dynamic equations: 11 Newton–Euler formulation, 12 Lagrangian formulation, 13 virtual work principle, 14 and Kane’s method. 15 As opposed to non-redundant parallel manipulators, the dynamics of redundantly actuated parallel manipulators are statically undetermined and have infinite possible solutions. An optimization technique to minimize an objective function while satisfying the dynamic equations should be used to obtain a unique solution to the inverse dynamics. Many studies have been conducted on the dynamics of redundantly actuated parallel manipulators. Nahon and Angeles 16 used a quadratic-programming approach by minimizing the internal forces in the system to obtain real-time solutions to the force optimization problem of redundantly actuated parallel manipulators. Cheng et al. 17 used the Moore–Penrose pseudoinverse to find the solution of a 2-DOF redundant parallel manipulator. However, flexible deformation of the manipulator is generally neglected in dynamic models. In fact, deformation of the mechanisms has an important effect on the accuracy of a redundant parallel manipulator, in particular for heavy loads and high-speed motions. Some researchers attempted to derive the dynamics of redundant parallel manipulators by introducing the deformation compatibility equation. Liu et al. 18 and Xu et al. 19 introduced the deformation compatibility equation to deal with the dynamics of the redundant parallel manipulator. The work on the dynamics of redundant parallel manipulators that considers flexible deformation is scarce, and the bending deformation of the limb of the parallel manipulator is not considered.
We investigate the dynamic model of a novel 3-DOF redundantly actuated parallel manipulator. The dynamic model is derived using the Newton–Euler formulation, and both the axial and bending deformations of the limbs are taken as an inequality constraint to find the solution of the dynamic model. Based on the dynamic model presented, a driving forces optimization is introduced, which can improve the motion accuracy of the tool tip, and the dynamic model is incorporated into a control system. This article is organized as follows. The section “Kinematics” gives the structure description and kinematics, which are used to derive the force and moment equilibrium equation of the manipulator components in the section “Dynamic model of the parallel manipulator.” The section “Driving force optimization” investigates the flexible deformation of limbs to provide the inequality constraint to the dynamic model. The section “Control application” deals with the control application of the dynamic model. Conclusions are presented in the section “Conclusions.”
Kinematics
Structure description and inverse kinematics
A schematic diagram of the 3-DOF redundant parallel manipulator is shown in Figure 1 and the corresponding kinematic model is given in Figure 2. It is composed of a moving platform linked to the base by two RPU (R, P, and U standing for rotational, prismatic and universal joints, respectively) limbs, one RPS (S standing for spherical joint), and one UPU limb. All the prismatic joints in the four limbs are active. The limbs are numbered 1–4. The first, third, and fourth limbs are coplanar and the two rotational axes of the U joint connecting the moving platform of one limb are parallel to the two rotational axes of the U joint connecting the moving platform of other limb, respectively.

Three-dimensional model of the parallel manipulator.

Kinematic model of the parallel manipulator.
The base coordinate O − XYZ is fixed on point B4 with a vertical Z axis. The Y axis is along the vector from B4 to B1, and the X axis satisfies the right-hand rule. Meanwhile, a moving coordinate system
The geometrical parameters are defined as

where α1 and α2 are the rotation angles of platform around the X and Y axes, respectively.
The translational DOF along the Y axis is restricted by the second limb, but the unwanted parasitic motion along the Y axis exists because of the S joint of the second limb when the orientation of the moving platform changes.
Let

where
For point A2,

Thus, the parasitic motion in the Y direction can be determined based on equation (3). The constraint equation associated with each limb can be written as

where
The vector loop equation for each kinematic chain in O − XYZ can be written as

where
The position vector of mass center Ci of the lower part of link AiBi in O − XYZ can be expressed as

where Lc is the length of lower part of link AiBi. The position vector of mass center Di of the upper part of limb AiBi can be written as

where Ld is the length of upper part of link AiBi. Because the moving platform is an isosceles right triangle, the position vector of the mass center of the moving platform can be expressed as

Velocity analysis
Choosing point Bi as the center of rotation of link AiBi and taking the derivative of equation (5) with respect to time leads to

where

Taking the cross product with

Differentiating equation (6) with respect to time leads to

Taking the derivative of equation (7) with respect to time leads to

Dynamic model of the parallel manipulator
Acceleration analysis
Differentiating equation (9) with respect to time yields equation (14)

where

The angular acceleration

Differentiating equation (12) with respect to time yields

The acceleration of the mass center of the upper part of link AiBi can be obtained by differentiating equation (13) to give

Dynamic model
For a less-DOF parallel machine, its limbs contribute not only to transmitting driving forces/torques but also to providing constraint forces/torques. If all the constraint forces/torques are taken into account, there will be too many redundant forces/torques that will make the dynamic model much more complicated. To simplify the problem, it is assumed that only the force in Z axis and the moments around the X and Y axes are imposed on the moving platform. The free-body diagram of link AiBi is shown in Figure 3.

Free-body diagram of link AiBi.
The Euler equation of link AiBi with respect to O − XYZ is given by

Where
Taking the cross product with

Based on the orientation of R joints in the first, second, and third limbs, we conclude that
Based on Figure 4, the Newtonian equation of the moving platform can be written as
Free-body diagram of moving platform.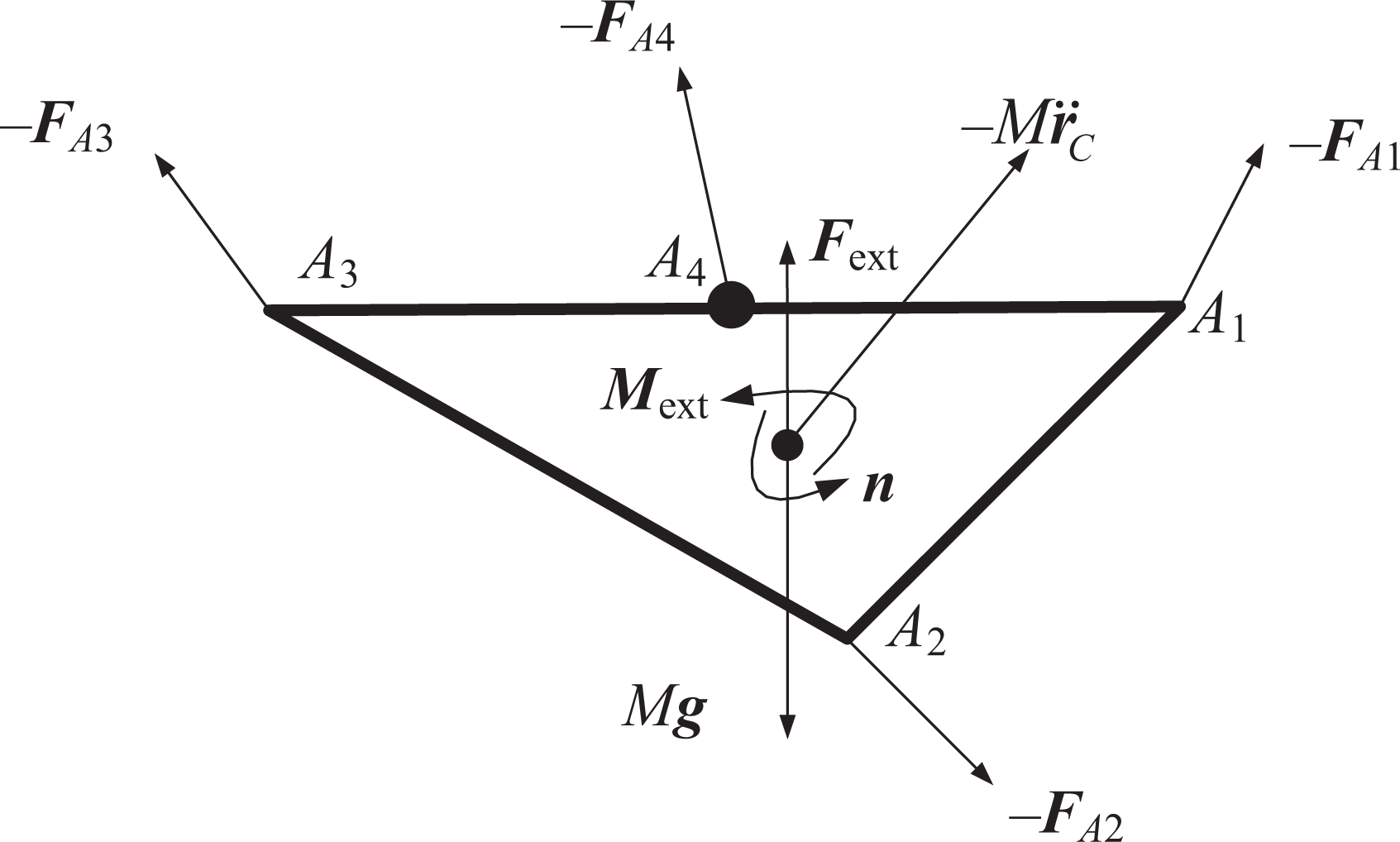

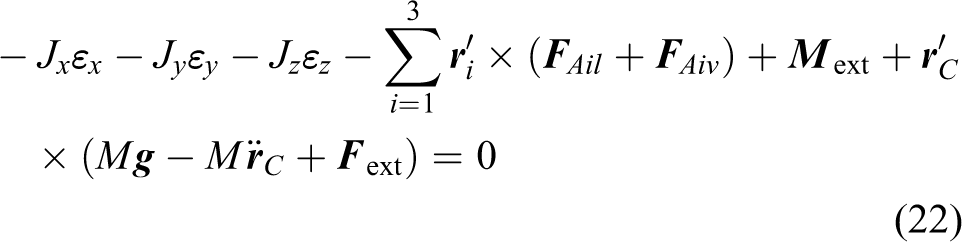
where Jx, Jy, and Jz are moments of inertia of X′, Y′, and Z′ axes about point A4, respectively, and
Combining equations (21) and (22) with equation (20) leads to

where
Driving force optimization
Deformations of non-redundant links
In practical applications, the limb with lowest stiffness in the manipulator has a flexible deformation. If this deformation is not considered, the motion accuracy of the manipulation is low. Here, the flexible deformation of the limb is considered. Based on the structure of the redundant parallel manipulator in this article, the deformations of the joints, base, and moving platform can be ignored. Because the non-redundant limbs (the first, second, and third limbs) are driven with a position control model and the redundant limb (the fourth limb) is driven with a force control model, which will be discussed in detail in the section “Control application,” we mainly investigate the deformations of the non-redundant limbs. There are two kinds of deformations of link AiBi. As shown in Figure 5, the axial deformation leads to the axial error δLil and the bending deformation leads to the tangential error δLiv.

Deformation diagrams of link AiBi.
The force of link AiBi has to be analyzed to obtain the deformation of the limb.
18
The force analysis of link AiBi is shown in Figure 6, where m(u)


Force analysis diagram of link AiBi.
First, let us focus on the axial deformation. Since the prismatic joint of each limb is actuated by a servomotor via a ball screw, both the upper and lower parts of each limb have axial deformations. Because the overlap of the upper and lower parts of limb is relatively short, while its stiffness is large, the axial deformation of overlap is neglected. For link

The axial deformation of link AiBi can be expressed as

where SA and SB are the cross-sectional areas of the upper and lower part of link AiBi, respectively, and E is the elastic modulus.
The first, third, and fourth limbs are coplanar (O − YZ plane), and the second limb is located in the vertical plane (O − XZ plane). As mentioned in the section “Dynamic model of the parallel manipulator,” the constraint moment
Similarly, based on the abovementioned analysis, motions of the end point A1 and A3 of the first and third limbs along the X axis are limited due to the R joints, so the bending deformation of the first and third limb is along the X axis. Unlike the second limb, the first and third limbs are coplanar (O − YZ plane), so the stiffness of these limbs along the X axis is relatively large and the influence on the error of the end point is small so the bending deformations of the first and third limbs can be neglected. Thus, only the bending deformation of the second limb is taken into consideration here.
Because the gravity and inertia moment of the link are smaller than constraint force, thus only the constraint force

As mentioned earlier, the bending deformation of the second limb can be seen as that of a cantilever, and the bending stiffness of the lower limb and the overlap of the upper and lower limbs is relatively large so that their bending deformation can be neglected. According to the knowledge of mechanics of materials, 20 the displacement of the end of a cantilever can be obtained by solving the differential equation for small deflection of cantilever of linear elastic material, it can be expressed as

where P is the force acting on the end point of the cantilever, L is the length of the cantilever, and I is the moment of inertia of the cantilever cross section about the neutral axis. For upper part of link AiBi, I can be expressed as

Platform displacement caused by the link deformation
The position vector of point A4 (origin of moving coordinate system

The deformations of link AiBi lead to the errors of the moving platform including the rotation error

For limbs 1 and 3,

According to the analysis in the section “Kinematics,” we can get

By eliminating equation (30) from equation (32) and then neglecting high-order small quantities, we can obtain

Considering

Based on the analysis in the subsection “Deformations of non-redundant links,” the bending deformation of the second limb should be taken into account. For the second limb, equation (30) can be rewritten as

By eliminating equation (30) from equation (36) and then taking dot product of equation (36) with

Based on equations (35) and (37), we can obtain the relationship between the deformations of non-redundant limbs and the kinematic errors of moving platform as

where
Objective function
In practical applications, a tool is fixed on the moving platform, and the parallel manipulator can be used to develop the tool. Let the tool length be Lt and the tool be fixed at point A4. The tool length vector is along the Z′ axis. Based on the dynamic model presented earlier, we can improve the position accuracy of the tool tip by optimizing the driving forces of the manipulator. Thus, the optimizing object is to lower the error of the tool tip, which is caused by both axial and bending deformations of the limbs, to a minimum. The objective function can be expressed as

where δxt, δyt, and δzt are the errors of the tool tip in the X, Y, and Z axes, respectively. Combining equation (23) and (38) leads to

where

where

where

where

Equation (44) can be written in the matrix format as

where
Equation (45) shows the relationship between link deformation and the errors of the tool tip. Since the optimization goal is to minimize the error of the tool tip,

To minimize δ

Based on equation (47), λ can be determined by

Substituting equation (48) into equation (41), the drive forces can be determined.
Control application
Control scheme
The control strategy of a redundant parallel manipulator is more complicated than that of non-redundant one, and for the redundantly actuated manipulator, position and force control are widely used. 21,22 For the 3-DOF redundantly actuated parallel manipulator in this article, the redundant limb is controlled with a force control mode and the non-redundant limbs are controlled with a position control mode. As for position control mode, it consists of a current loop, a velocity loop, and a position loop. The expected input positions of the non-redundant limbs (L1, L2, and L3) come from the inverse kinematics equation (3) in the subsection “Structure description and inverse kinematics.” For force control mode, sections “Dynamic model of the parallel manipulator” and “Driving force optimization” build the dynamic model of the parallel manipulator and optimize the driving force, finally by substituting equation (48) into equation (41) in the subsection “Objective function,” we can get the optimized driving forces as the expected driving force of the redundant limb. The control scheme of the redundant parallel manipulator is shown in Figure 7.
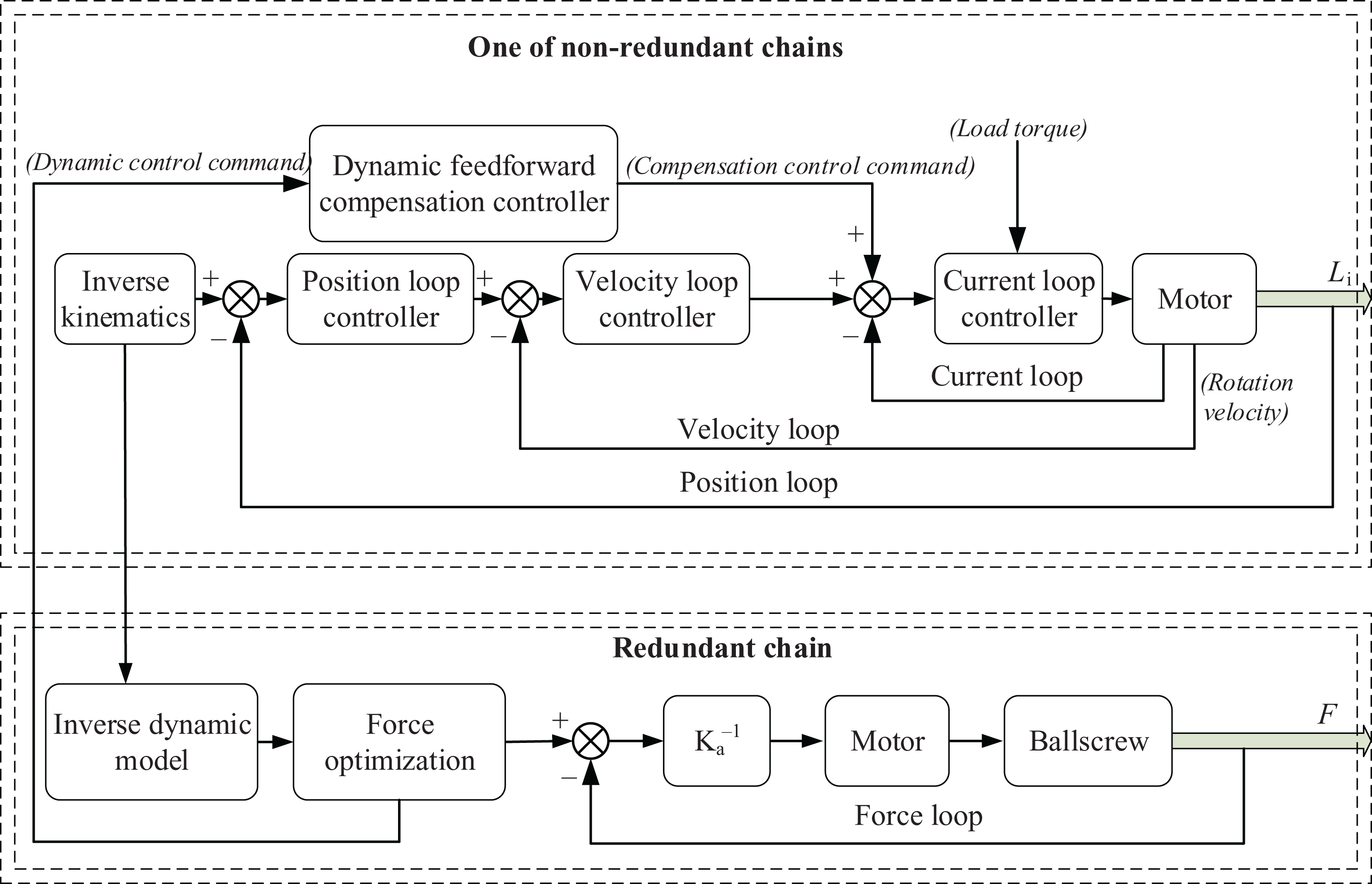
Schematic diagram of control system.
Besides, for the non-redundant limbs, the load torque as a kind of nonlinear effect on the servomotor will affect the accuracy of the output of the servomotor. As the dynamic model is built and the driving force optimization is applied, the load force of each actuator link during the machine running can be obtained from equation (48). As mentioned earlier, each limb of the redundantly actuated parallel manipulator is actuated by a servomotor via a ball screw and the pitch of lead screw is known, so the load torque of each servomotor can be calculated. Thus, the nonlinear effect on the servomotor caused by the load torque can be compensated by a dynamic feedforward compensator. As shown in Figure 7, the transfer function from the input of compensation control command to the output of rotation velocity is G1(s), and the transfer function from the input of load torque to the output of rotation velocity is G2(s), in order to improve the output accuracy of the servomotor by compensating the nonlinear effect caused by the load torque, the transfer function of the dynamic feedforward compensation controller G df (s) should satisfy the following equation

It should be noted that more future research about the control system is required to improve the performance of the controller in real-world application. For example, intelligence control such as neural control and fuzzy control might be needed to solve the problem of disturbance of this manipulator. 23,24 But before that, the efforts on the dynamic model and optimization are also very necessary and meaningful for improving the accuracy of the tool tip.
Results
The geometrical and inertial parameters of the manipulator are given in Table 1. The dynamics and control are simulated when the tool moves along the trajectory shown in Figure 8. In the motion, the acceleration of translational motion of the moving platform is given by

The geometrical and inertial parameters of the manipulator.


Simulation trajectory.
where Tt is the acceleration/deceleration time, Tf is the total run time, and a0 is the maximum acceleration.
Similarly, the angular acceleration of the moving platform is given by

where ε0 is the maximum angular acceleration. In the simulation,
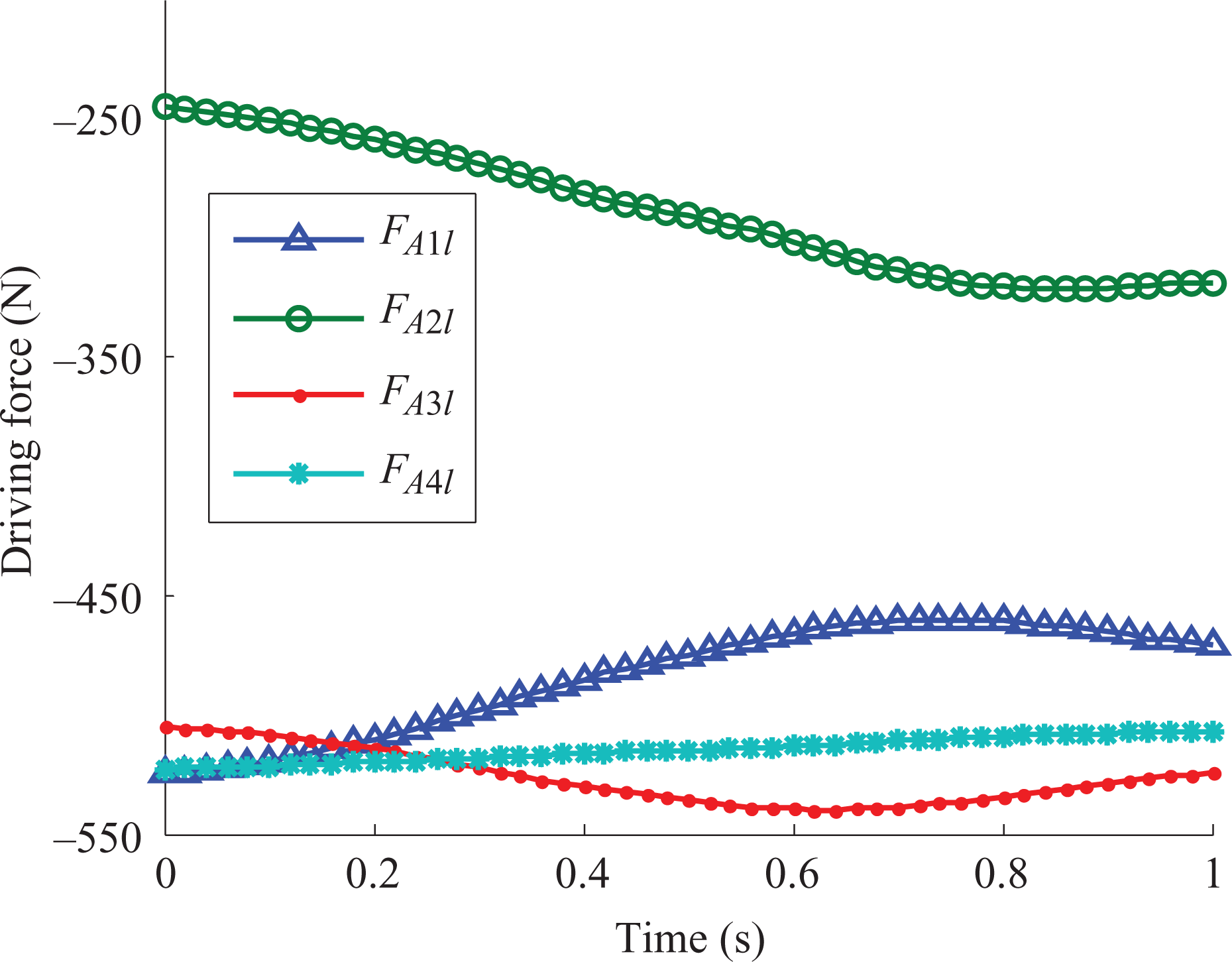
As the driving forces directly affect the deformations of the limbs, they can also be minimized to improve the position error. Thus, the traditional driving force optimization method, which aims to minimize the driving forces (optimization goal:
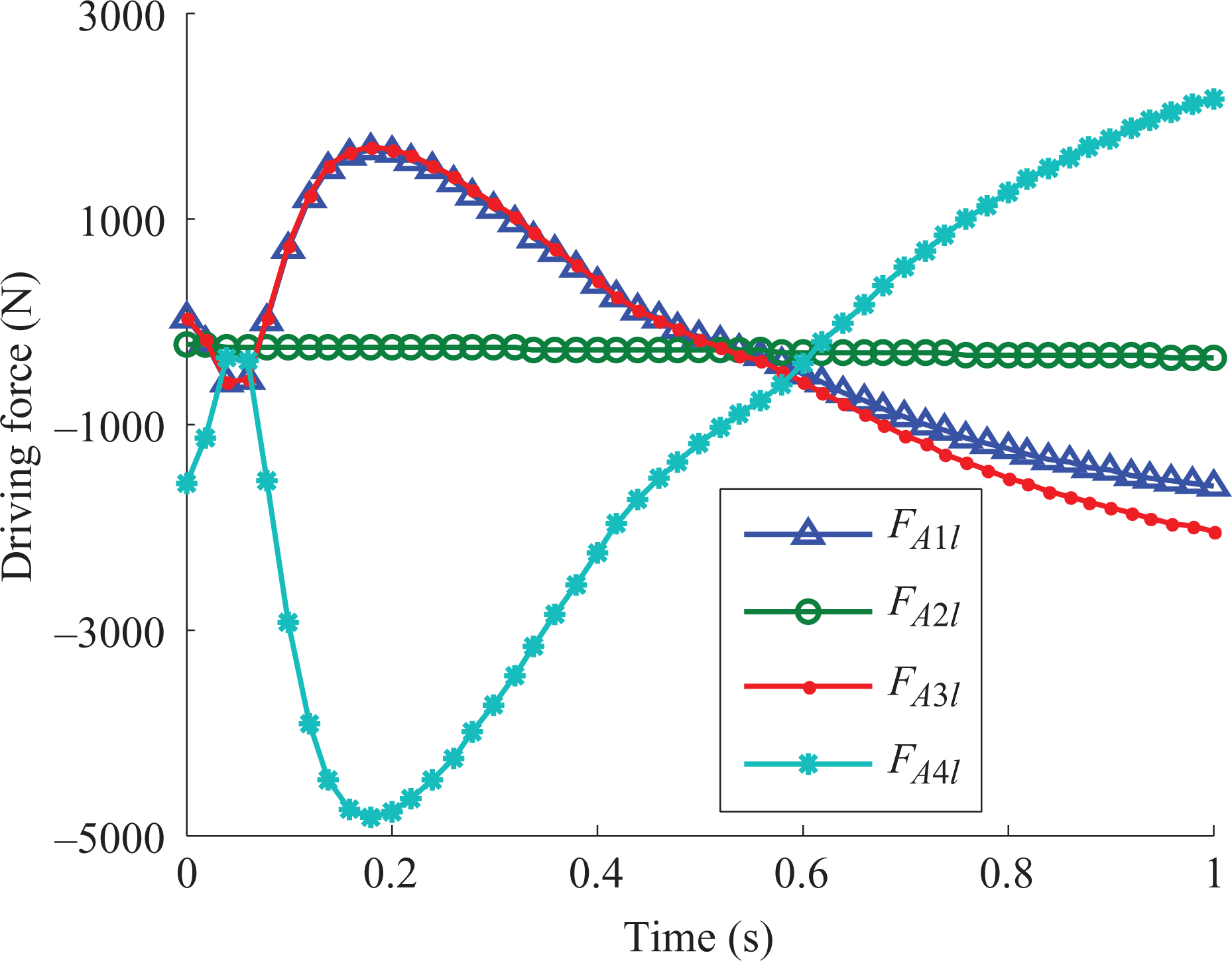
Driving forces in method I.
Driving forces in method II.
In the rigid-body dynamic model, the flexible deformation of limb is neglected, and the position of the tool tip can be obtained based on the rigid-body model. If the flexible deformation of limbs is considered, the position of tool tip will be different from the values in the rigid-body model. Here, the difference between the tool tip position computed from the model that considers the limb deformation and the tool tip position computed from the rigid-body model is defined as the position error. When methods I and II are used, the position errors are simulated as shown in Figure 11 and we can see that the position error can be greatly reduced when method I is used. Furthermore, the total position error of the tool tip (
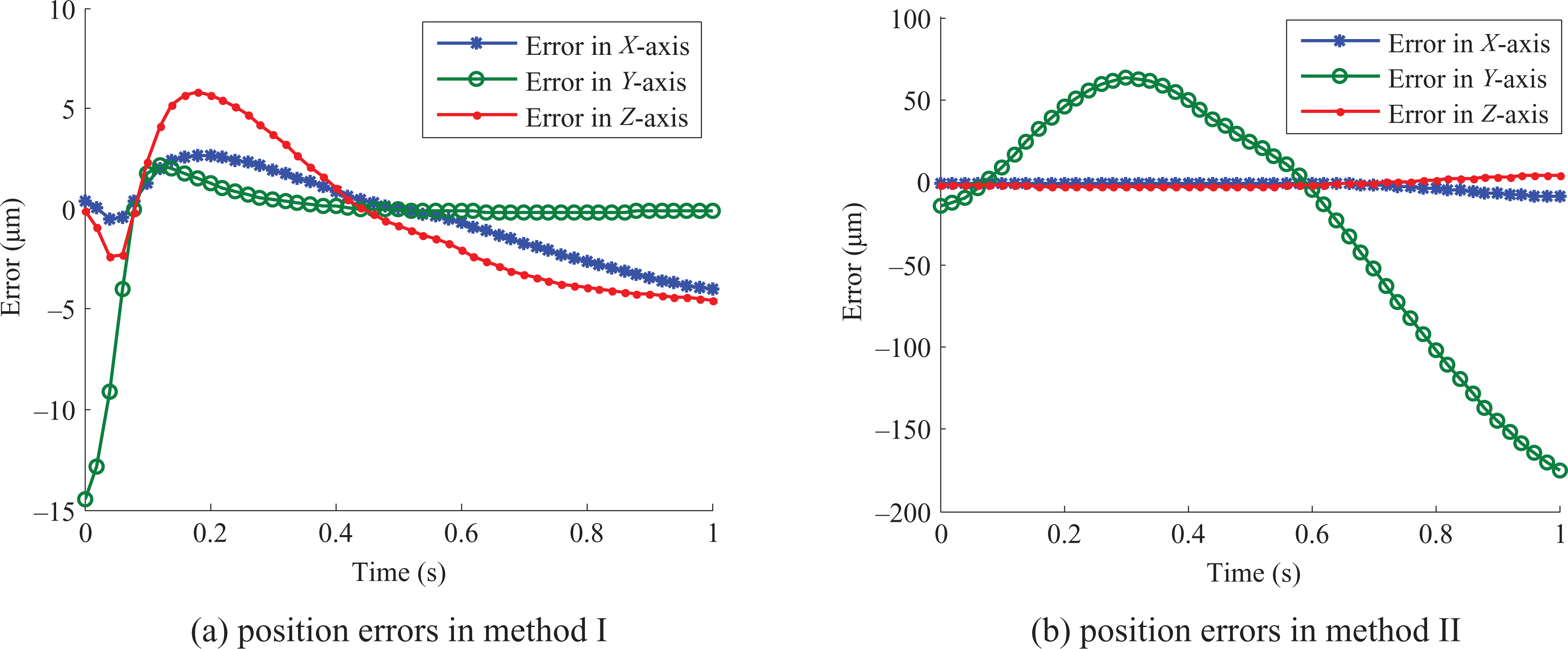
Position errors of tool tip caused by the link deformation.

Total position error of two methods.
To validate the dynamic model further, the dynamic model is incorporated into the proposed control system. The control system is simulated using the Simulink soft pack in Matlab, R2014a. When the manipulator moves along the trajectory as shown in Figure 8, the control system with force optimization method I is simulated. Furthermore, the force optimization method II is used in the control system and the manipulator moves with the same trajectory. The motion error of the redundant parallel manipulator is shown in Figure 13, and it can be noted that the position error simulated from the control system is larger than that computed from the dynamic model by comparing Figure 13 with Figure 11, and the reason is that the error from the control system is not considered in Figure 11. As shown in Figure 13, when method I is used, the position error is still smaller than the error obtained while using method II.

Motion accuracy of the parallel manipulator.
The total motion accuracy of the manipulator is shown in Figure 14. When method I is used, the maximum value of total position error is less than 0.031 mm, while the maximum value of total position error is greater than 0.15 mm when method II is used. In most of the motion trajectory, the total position error of the tool tip is smaller when method I is used. This result shows that the dynamic model and force optimization method are effective in control model.

Total motion error of tool tip.
Conclusions
We studied the dynamic modeling of a novel 3-DOF redundantly actuated parallel manipulator by taking both the axial and bending deformations of the limbs into account. The driving force optimization method, which aims to minimize the error of the tool tip, is studied. The dynamic model is used in the model-based control system of the parallel manipulator, and the maximum position error is about 0.031 mm. When the traditional method to minimize the normal driving forces is used in the control system, the maximum position error of the tool tip is greater than 0.15 mm. The analyses and comparison reveal that the dynamic model and optimization presented in this article are effective and can be used in the control system to improve the position accuracy of the redundantly actuated parallel manipulator.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (grant no. 51275260) and the Science and Technology Major Project-Advanced NC Machine Tools & Basic Manufacturing Equipment (2015ZX04001002).