
Abstract
Dynamic parameters of joints are indispensable factors affecting performance of machine tools. In order to obtain the stiffness and damping of sliding joints between the working platform and the machine tool body of the surface grinder, a new method of dynamic parameters identification is proposed that based on deep neural network (DNN) modeling. Firstly, the DNN model of dynamic parameters for working platform-machine tool body sliding joints is established by taking the stiffness and damping parameters as the input and the natural frequencies as the output. Secondly, the number of hidden layers in DNN topology is optimally selected in order to the optimal training results. Thirdly, combining the predicted results by DNN model with experimental results by modal test, the stiffness and damping are identified via cuckoo search algorithm. Finally, the relative error between the predicted and experimental results is less than 2.2%, which achieves extremely high prediction precision; and thereby indicates the feasibility and effectiveness of the proposed method.
Keywords
Introduction
As a kind of machine tool used for finish machining, grinder plays a significant role in the field of precision manufacturing. Along with the technical development, higher speed, automation, and precision are the increasingly growing trend, thus, superior static and dynamic characteristics are required.1–4 An accurate dynamic model is a prerequisite for improving the design level of machine tools. 5 Joints are the important part of dynamic model and they always affect the partial stiffness of machine tools, thus the machining performance will be influenced. 6–9 Some studies have manifested that 30%-50% of the static stiffness and 90% of the damping for machine tool depend on joints, moreover, 60% of the vibration problems occurring on the machine tool are related to the joints.10–12 Consequently, it is of great significance to establish dynamic model and identify the dynamic parameters accurately.
Aiming at the dynamic modeling and parameters identification of joints for machine tools, many researchers have focused on three kinds of methods: theoretical calculation method, experimental method and the method combining theory with experiment.6,13 However, due to the complexity and lower accuracy of the theoretical calculation method, and the experimental method has poor universality which can only identify a single dynamic parameter of the joint, therefore, the method combining theory with experiment is widely adopted at present. For this method, the dynamic model with joints’ parameters is established based on modeling theories; the experimental results of the joints-system are obtained under certain conditions; then the parameters of joints can be effectively identified by adopting the optimization algorithm. As the dynamic model of the machine tool joints with many parameters and it is of high nonlinear, besides, the intelligent optimization algorithms are being improved increasingly. During the parameters identification, the intelligent optimization algorithms are adopted more those with higher robustness and can approach the optimal solution in the range. 14 Zhu et al. 4 solved the identification equations of the rolling joints’ axial stiffness and damping parameters by using the genetic algorithm (GA). Li et al. 15 identify the parameters of bolt joint by adopting the simulated annealing algorithm. Wang et al. 16 adopted the particle swarm optimization (PSO) algorithm to identify the parameters at the tool-holder joint by minimizing the difference between predicted and tested tool point FRFs. Although such kind of method can reduce the complexity of theoretical derivation and improve the generality to some extent, modeling precision is still limited, resulting in the accuracy of parameters identification is not very high.17,18 Summarily, some scholars choose the approximate model with high fitting precision to replace the theoretical model. Padmanabhan 19 relatively early developed the predictive equations for damping in machine joints based on experiments through response surface methodology (RSM). However, limited by the technical conditions at that time, this research method is based on statistical analysis, which needs to be fitted repeatedly, leading to large amount of workload. 20 With the development of computer technology, it is more and more convenient to obtain statistical data. Wang et al. 21 constructed the polynomial RSM based on the samples acquired by experimental design, then, they took the relative error between the RSM calculated results and tested results as the objective function, and employed an adaptive simulated annealing algorithm to optimize the dynamic parameters and the relative error is less than 5%.
Since the crux of the approximate model is approximation modeling of the optimization model based on computer aided engineering (CAE), 22 and there exists exceedingly complex nonlinear mapping relationship among the dynamic parameters of the joints, 23 artificial neural network can be adopted as a general mathematical model of multi-dimensional nonlinear functions with its excellent nonlinear mapping ability.24,25 Zhang et al. 26 proposed to establish the nonlinear relationship between the characteristic parameters of the joints including contact stiffness and many of its influencing factors by utilizing back propagation (BP) neural network for the first time. Thereupon then, the characteristic parameters can be predicted founded on the thoroughly trained BP network. Yang et al. 27 stated an algorithm model combining the modified particle swarm optimizer (MPSO) and BP neural network, which could achieve high accuracy of modeling and forecasting of the normal and tangential contact stiffness for joints under various affecting factors. Zhu et al. 28 put forward to a method that set up a simulation model of sliding joints by neural network and combined with cuckoo search algorithm for identify the dynamic parameters. The final relative error reduced to less than 3.5%, which improved the identification accuracy compared with the former research. Theoretically, neural network can approach any function. Nevertheless, neural network, as a kind of shallow network, its mapping ability for complex and high dimensional data is still limited as it is restricted by limited training samples and calculation units, which leads to weaker dynamic modeling accuracy of joints. Due to the complicated mechanical structure, the dynamic model of the surface grinder sliding joints features multi-inputs and multi-outputs, extreme nonlinearity and strong coupling. The current modeling methods based on shallow network cannot meet the characteristics very well. Some studies have indicated that modeling on complex problems by shallow network will not only cause a sharp increase of computational complexity, but also lead to generalization errors as the lack of network layers, which will not capture the statistical characteristics of data, and thus, it can not reflect the mapping relationship of the data accurately.29,30
With the development of big data and the increase of computer capabilities, as a machine learning method with deeper layers, more complex structure and better modeling ability, deep neural network (DNN) has achieved breakthroughs in various big data processing problems.31,32 In the field of speech processing, Microsoft researchers took advantages of the great learning ability of DNN to construct a speech recognition and translation system, via which simultaneous interpretation could be realized. IFLYTEK applied DNN to Chinese speech recognition, which was officially launched in May 2012.33,34 In the field of image processing, DNN has played a great role in image recognition, image classification, image detection, etc. What’s more, the error of image processing has been constantly reducing and reached a very high accuracy. 35 In addition, DNN is widely used in many industrial fields, such as video processing, 36 intelligent robots. 37 With the in-depth study, DNN is indicated that suitable for processing high dimensional nonlinear data problems in machining issues because of its high abstract representation, data adaptability and complex modeling. Bai et al. 38 proposed a DNN consisting of a deep belief network in the bottom and a regression layer on the top to predict the product quality during a kind of multi-parameters complex manufacturing system. The experiments showed that the DNN had better prediction accuracy than the peer shallow models. Ren et al. 39 proposed a prediction framework for bearing remaining useful life (RUL) by using deep autoencoder and DNN, after comparison, the results showed that it was of higher prediction accuracy than other models. Fan et al. 40 had realized the prediction for surface roughness of wire electrical discharge machining (WEDM) based on DNN and the Markov chain integrated with DNN (MC-DNN) respectively. The results showed that the prediction methods possessed comparatively fine performance.
Exactly as mentioned above, the surface grinder has very complex mechanical structure, therefrom, the dynamic model of sliding joints presents the characteristics of multi-inputs and multi-outputs, strong coupling etc. From the existing studies, DNN has played a very important role in the above-mentioned high dimensional nonlinear problems. Although it is not widely used in dynamic modeling and dynamic parameters identification for joints of the machine tool, it can be inferred that DNN has a good potential to solve such issues. Taking the self-developed M7120D/H surface grinder as the research object, in this paper, a new approach of dynamic parameters identification for sliding joints based on DNN modeling is presented, moreover, the number of hidden layers in the network topology is optimally selected so as to make the training results optimum. Then combining with the experimental results of modal test and the cuckoo research algorithm is used to identify the stiffness and damping parameters. Therefrom, higher identification precision can be achieved and a valuable reference to other joints may be provided.
The rest of this paper is organized as follows: Section 2 presents the basic principle of proposed research method. Parameters identification based on DNN modeling is discussed in Section 3. Finally, Section 4 concludes the paper and discusses some possible follow-up research ideas.
Proposed methodology
In this paper, the framework of the proposed study on identification for dynamic parameters of surface grinder sliding joints based on DNN modeling is shown in Figure 1, which mainly includes four parts: sliding joints modeling and theoretical modal analysis; DNN model designing and training; experimental modal test; dynamic parameters identification.
1. Sliding joints modeling and theoretical modal analysis

The framework of the proposed method.
According to the above process, it is necessary to establish the equivalent dynamic model of the sliding joints. At present, commonly, several spring-damping elements are used to represent the contact characteristics of the joint. Then, the theoretical modal analysis will be conducted through finite element analysis (FEA) software to calculate the theoretical values of the corresponding natural frequencies with different stiffness and damping conditions. After obtaining large amount of data, furtherly, it can be used as the training datasets of the DNN model.
2. DNN model designing and training
During DNN model designing and training, stiffness and damping of the joint are defined as the input, and the corresponding required first several order natural frequencies by theoretical modal analysis are defined as output of the DNN model. Considering the complex structure of surface grinder sliding joints, the data model features multi-input and multi-output, moreover, the relationship of the inputs and outputs is strongly coupled and highly nonlinear.
3. Experimental modal test
In the process of modal test, the acceleration sensor is set in the reasonable position, the hammer test is carried out by the force hammer to excite the vibration, and the vibration signal is collected and analyzed by the test-analysis system, so as to obtain the experimental natural frequencies of the sliding joints.
4. Dynamic parameters identification
In the process of dynamic parameters identification, firstly, the optimization model is established, that is, the optimization variables and their ranges are determined, and the optimization objective function and constrain conditions are constructed; secondly, the predicted values are obtained by the DNN model, and the experimental values are obtained by modal test; furthermore, the optimization issue is calculated by the selected appropriate convergence conditions and the appropriate optimization algorithm. Consequently, the optimal solution, which is the dynamic parameters of joints can be calculated.
Sliding joints modeling and theoretical modal analysis
In the actual machining process, the joints of machine tools always act out both elasticity and damping. The equivalent dynamic model composed of spring-damping element can be adopted to approximate its contact characteristics. As shown in Figure 2, a sliding joint model is established in this paper. In this figure, the part A and part B are connected by a set of spring-damping element, which exists equivalent stiffness

Equivalent dynamic model of the working platform-machine tool body sliding joint.
In this paper, as many N sets samples of stiffness
DNN model design and training
Theoretical foundation of DNN
Figure 3 shows a typical DNN model with (h + 2) layers, where, h is the number of hidden layers. The first is the input layer with m inputs which is mainly used for receiving input signals without operation. The second to (h + 1) ones are the hidden layers, different each of them contains different nodes. The (h + 2)th one, that is the last, is the output layer, containing n outputs, which is used for outputting the final result.
41
In this paper, the nodes in the input layer are the stiffness and damping parameters

Each node in the hidden and output layer represents a specific output function, which is called excitation function f; Each two nodes in the adjacent layers are connected through a certain weight w to transfer signal; In addition, the deviation b should be considered.
42
Therefore, the output vector

Where,

Where,
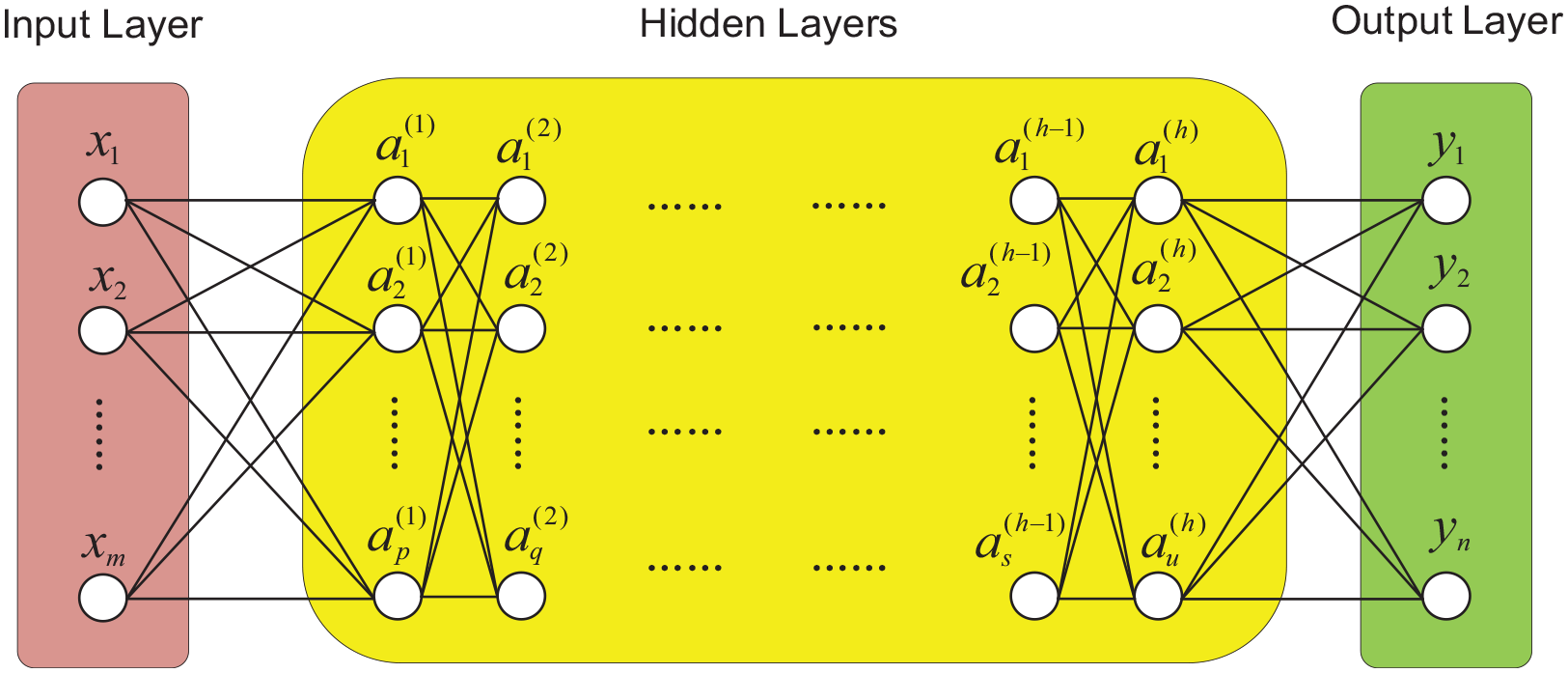
Structure of a DNN model with h hidden layers.
Developed on the basis of neural network, DNN is a deep network structure with multi-layer hidden layers, which can represent the mapping relationship for complex data. Compared with neural network, it can furtherly approximate the functions of more complex data which is higher dimensional and nonlinear, and it has the stronger mapping ability. However, the more hidden layers, that is, the deeper the network structure, will not only increase the calculation time, but also weaken the error feedback, thereby resulting in the disappearance of gradient and difficulty in updating. Therefore, when designing the DNN model, it is necessary to arrange the depth of network reasonably instead of blindly increasing the hidden layers, otherwise it may be counterproductive.
Model design and training
According to the principle of machine tool dynamics,
6
there is a complex nonlinear mapping relationship between the natural frequencies and the stiffness, damping of the joints. In this work, a DNN model has been established that is between the dynamic parameters
Figure 4 shows the process for DNN model training. For fully effectively training, the datasets is necessary to be as many as possible, that is, the N in the Figure 4 should be as large as possible. As shown from the data flow represented by the dotted line, the data of the DNN model is from the selected stiffness and damping within the parameters’ range and the corresponding calculated the first n order natural frequencies. In this paper, the stiffness and damping of the sliding joints are taken as the inputs of the DNN model, meanwhile, the first n order natural frequencies are taken as the outputs.

Modeling of DNN and model training.
Experimental modal test
The principle of modal test conducted on the working platform-machine tool body sliding joints is shown in Figure 5. The accelerometer is set at the proper position, and the force hammer is adopted to excite the vibration, and the modal test-analysis system is utilized to collect and analyze the vibration signal. In this paper, LMS. Test Lab (LMS for short) is selected as the test-analysis system that is a complete set of vibration and noise test solution developed by LMS Company. Actually, the LMS is the integration of data acquisition, test, analysis and report with high-speed and multi-channels.

The principle of experimental modal test.
Dynamic parameters identification
Theoretical foundation of cuckoo search algorithm
Cuckoo search algorithm is a kind of swarm intelligence optimization algorithm inspired by cuckoo’s behavior of flight, foraging and reproduction. Each individual’s movement is similar to the bird’s random movement, that is, Lévy-flight.48,49 Compared with other algorithm, cuckoo search algorithm has the advantages of stronger ability for global search and problem solving, simple algorithm structure, and excellent searching path. 50 The formula of the updated optimal nest position is shown in equation (4):

Where,

Where,
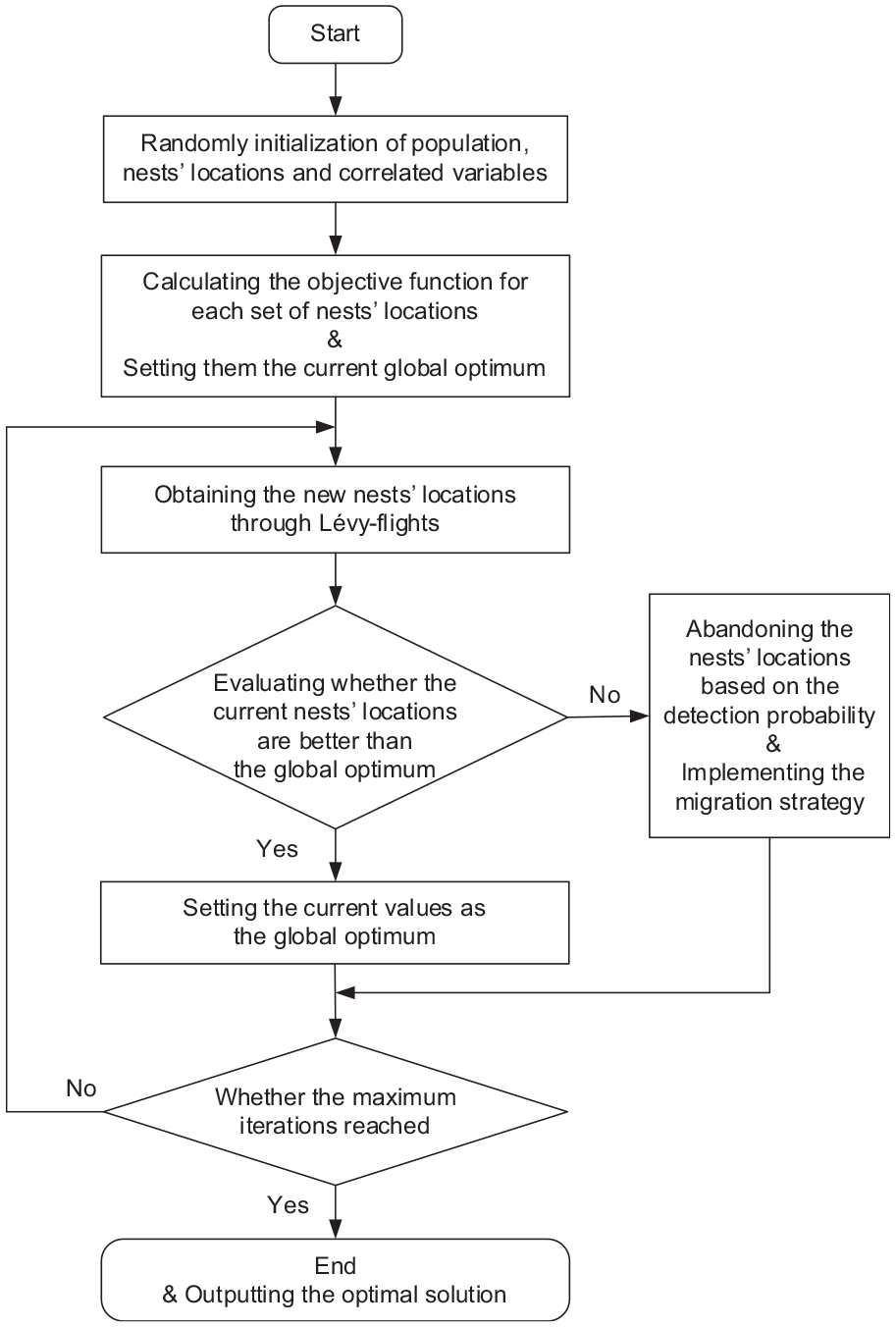
The standard process of cuckoo search algorithm.
Optimization identification
Stiffness and damping are typical dynamic parameters of the joint, whose identification process includes: defining the stiffness and damping parameters

Where,
The cuckoo search algorithm is adopted to solve the above-mentioned optimization issue, and then the optimal solution for the dynamic performance parameters

Process of optimization identification for dynamic parameters.
Case study and results discussion
As shown in Figure 8, the self-developed M7120D/H surface grinder as the research objective includes the machine tool body, working platform, grinding wheel box, sliding seat, column, etc. The working platform-machine tool body sliding joints of this grinder is shown in Figure 9, including one flat guide joint and two symmetrical V-guide joints. In this paper, the working platform-machine tool body sliding guide joints have been modeled, and the dynamic parameters are identified.
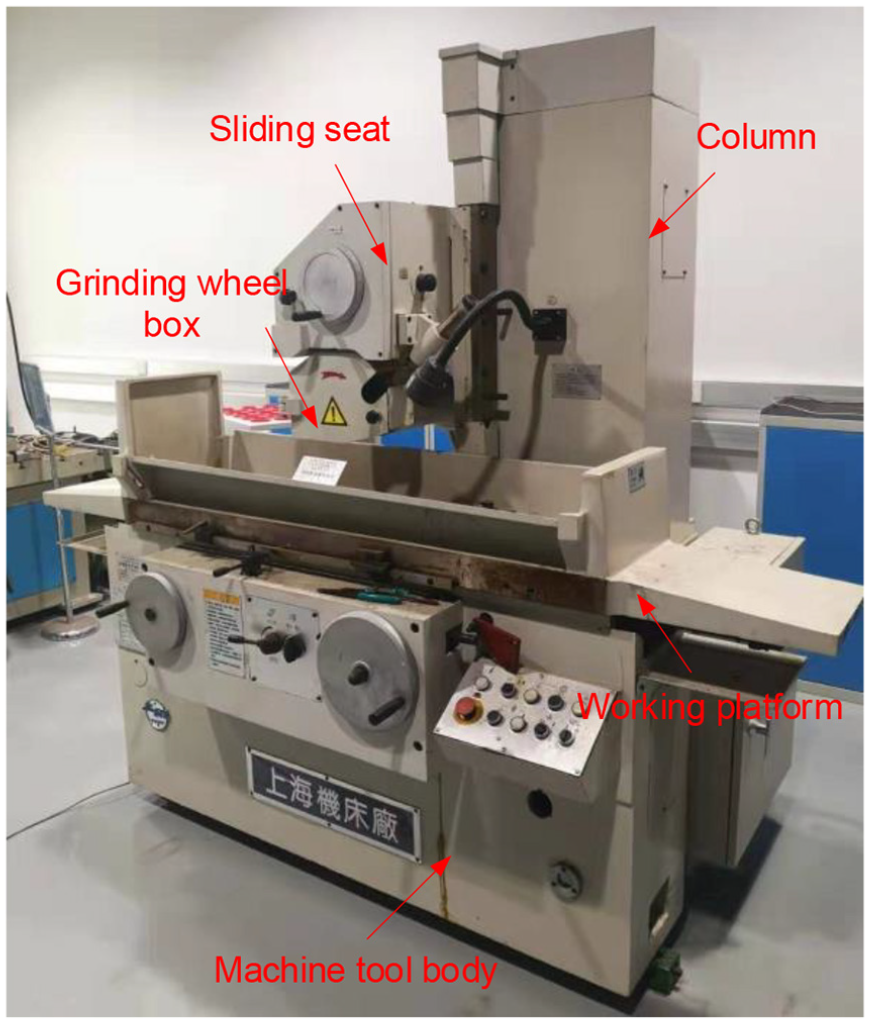
The M7120D/H surface grinder.

The sliding joints.
Sliding joints modeling and theoretical modal analysis
Theoretical model designing
Because of the parametric analysis module of COMSOL Multiphysics, the parametric sweep of stiffness and damping can be realized, and the modal analysis results under the different conditions can be obtained. During the FEA process, the key steps are following:
(1) Definition of material properties
According to the actual properties of the surface grinder, the material properties of the FEA model are defined as listed in Table 1.
(2) Mesh generation
The material properties of the joints.

The physics-controlled mesh is chosen as the sequence type, and the tetrahedral element is adopted, moreover, the fine element size is selected. So, the generated FEA model is shown in Figure 10. Where, the highlighted parts are the sliding joints to be researched.
(3) Modeling the joints
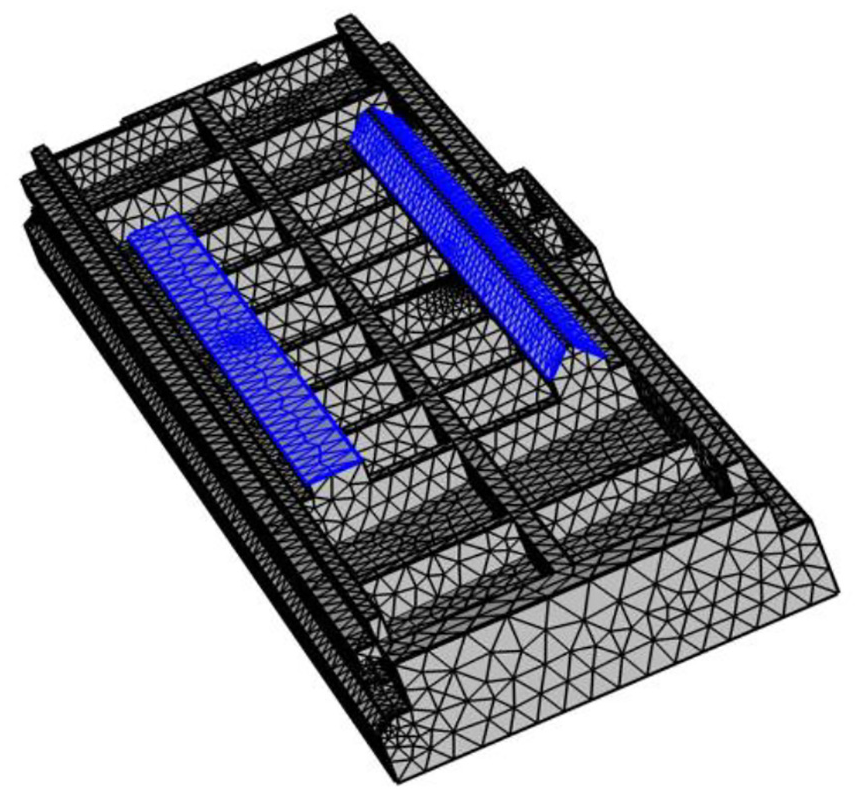
The FEA model of sliding joints.
For the flat guide, it is 1000 mm long and 60 mm wide, and the dynamic parameters are defined as
Input parameters designing
In order to obtain the training sample data of the DNN, it is necessary to determine the input parameters, that is, the range of stiffness and damping of the joints. According to the literature survey,6,28 the range of dynamic parameters is determined:

The distribution of input sample parameters: (a) the distribution of the input stiffness for the flat guide joint, (b) the distribution of the input damping for the flat guide joint, (c) the distribution of the input stiffness for the V-guide joints, and (d) the distribution of the input damping for the V-guide joints.
DNN model designing and training
Model designing
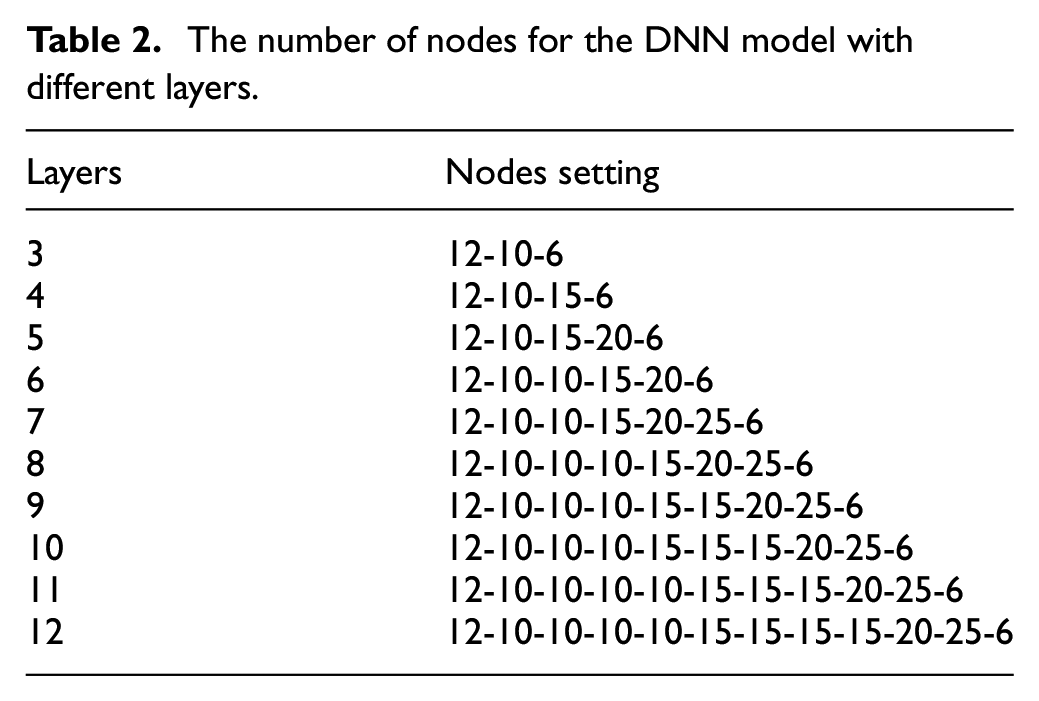
According to the modeling principle shown in Figure 1, and chapter 2.2, the models with 3–12 layers of BP neural network are adopted respectively in this paper. The stiffness and damping parameters of the joints are taken as the input, namely
The number of nodes for the DNN model with different layers.
Model training
For the above sample data, where, 7500 sets of that are taken as the training datasets and 2500 sets are taken as the validating datasets, the DNN model shown in Figure 4 is respectively trained that the variables mentioned in chapter 3.2.1 are adopted. Before training, in order to eliminate the influence of dimension among the variables and the negative effect caused by the singular samples, normalization is necessary, and the input and output parameters are transformed into values within 0–1. In the range of input sample parameters, another 2500 sets of random data of non-training nor non-validating samples are taken as testing datasets. Then the global mean absolute error (the global MAE) and the global root mean squared error (the global RMSE) for the results of the DNN model with different layers are compared, shown in Figure 12, and the formulas of them are expressed in Table 3 (No. 1–No. 2). It can be seen from Figure 12 that from three to six layers, the two evaluation indicators decrease gradually as the layer increases, and when the seven-layers, they increase. Under the condition of eight-layers, the two evaluation indicators reach the minimum, after then, they increase somehow and present a state of fluctuation.
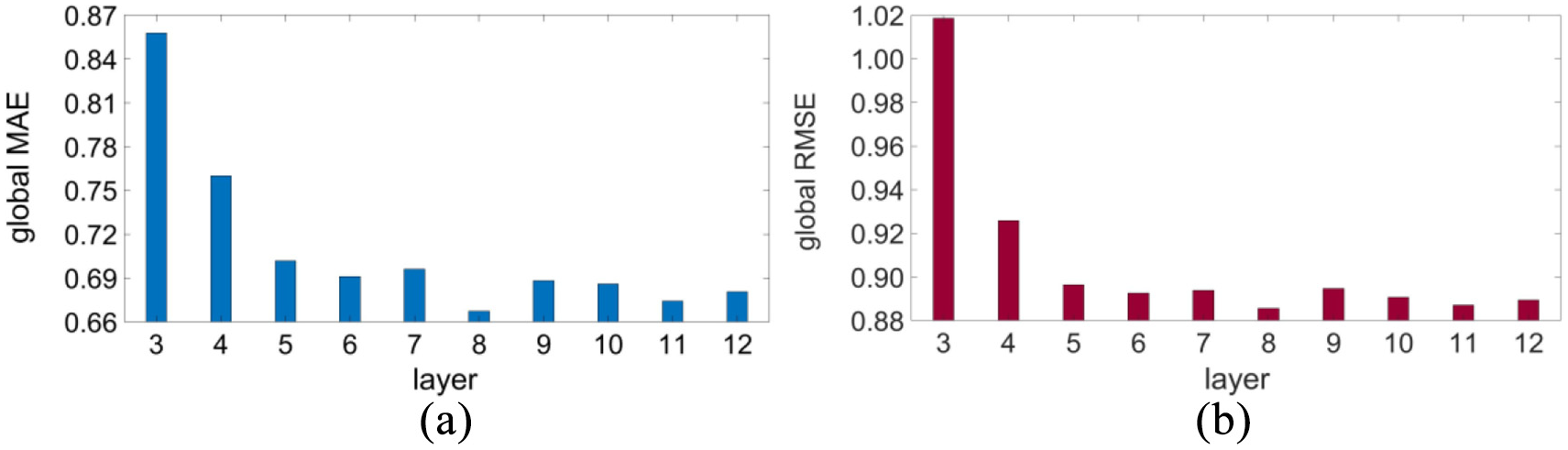
The characteristics of the DNN model under different layers: (a) the global-MAE for the results of the DNN model with 3-12 layers, and (b) the global-RMSE for the results of the DNN model with 3-12 layers.
List of evaluation indicators.
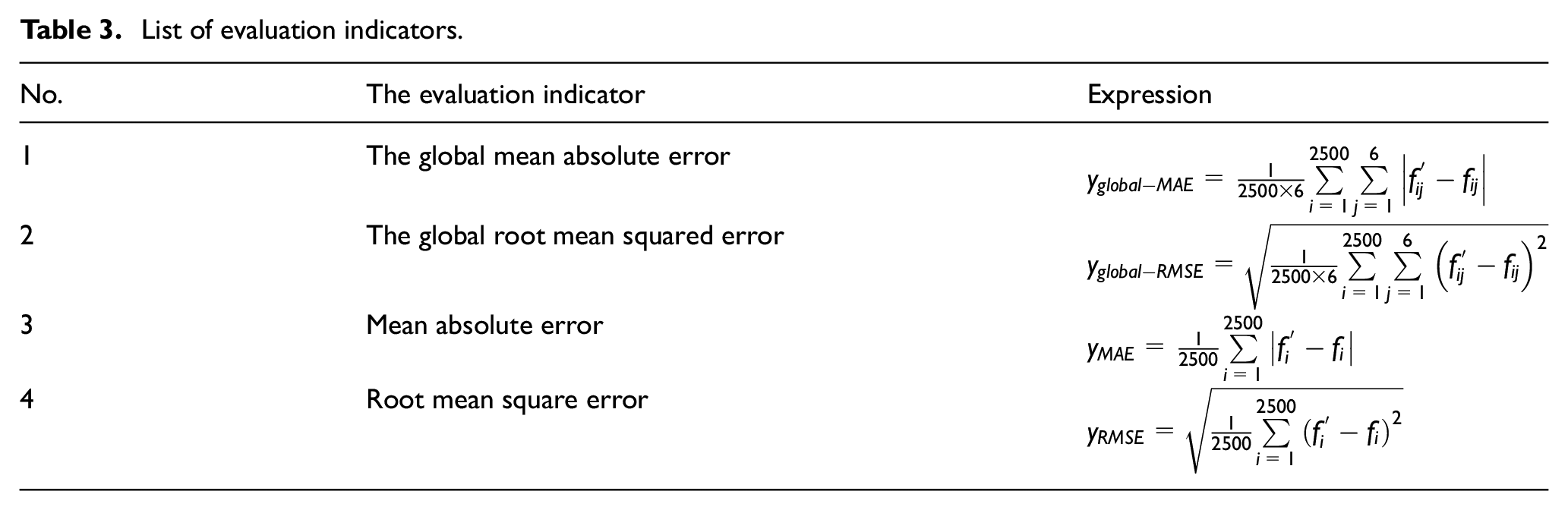
The output results of the DNN model with different BP layers are analyzed gradually by order, another two evaluation indicators listed in Table 3 (No. 3–No. 4): the mean absolute error (MAE), root mean square error (RMSE) of first–sixth order natural frequencies under the different layers conditions. As shown in Figure 13, the two evaluation indicators of the first and the second order natural frequencies under the eight-layers reach the minimum, and other orders natural frequencies’ evaluation indicators change little as the layer increases. Consequently, the DNN model with eight-layers BP neural network is selected to identify the dynamic performance of the sliding joints in this paper. The loss curves of eight-layers DNN model are shown in Figure 14, and it can be seen that the training error, the validating error and the test error are all convergent.

The performance of natural frequencies for the DNN model with different layers: (a) the MAE of the first-sixth order natural frequencies for the DNN model with 3-12 layers, and (b) the RMSE of the first-sixth order natural frequencies for the DNN model with 3-12 layers.

The loss curves of the DNN model with eight-layers.
Experimental modal test
Based on the principle shown in Figure 5, the modal test is conducted on the working platform-machine tool body sliding joints of the self-developed surface grinder, thus, its natural frequencies can be obtained. The experimental site is shown in Figure 15.

The experimental site.
A three-dimensional model is set up in LMS analysis system, as shown in Figure 16, in which 37 measuring points are arranged. The test method that excitation at single point and response at multi-points is adopted to conduct the modal test on the working platform-machine tool body sliding joints. During experimental modal test, the BK4525B three-directions acceleration sensors are set at the measuring points and the Kistler9724A2000 force hammer is adopted to excite vibration. The experimental modal analysis result is shown in Table 4.

The modal test model and the arrangement of the measuring points.
The experimental modal analysis result.

Dynamic parameters identification
The dynamic parameters of the surface grinder sliding joints, namely, the stiffness and damping


The convergence curve of the optimization identification.
The identification results of stiffness and damping.

Result discussion
Taking the identified stiffness and damping parameters into the theoretical modal analysis, thus, the theoretical values of the first six order natural frequencies for working platform-machine tool body sliding joints can be obtained, moreover, compared with the experimental values by modal test. Furthermore, because the research method proposed in Zhu et al. 28 has already achieved very high modeling accuracy, and the relative error of dynamic parameters identification is less than other research, in this paper, as a further verification, dynamic parameters identification is also studied by this method, then, the first six order frequencies calculated through the identified parameters are compared with the experimental results too. These comparisons are shown in Table 6.
Comparison between the theoretical values and the experimental values of the first six order natural frequencies for the working platform-machine tool body sliding joints.

As shown in the above table, it can be seen that the method proposed in this paper is of higher modeling accuracy. Theoretical modal analysis is conducted by adopting the parameters identified via this method, and the relative errors between the theoretical value and the experimental value of the first six order natural frequencies for the working-platform-machine tool body are all less than 2.2%, by contrast, the relative errors calculated by the method proposed in Zhu et al. 28 are all less than 3.3%. Besides, each of the relative error for the first five order natural frequencies obtained by the proposed method is lower than that obtained by the method proposed in Zhu et al., 28 only the relative error of the sixth order natural frequency is slightly higher. However, due to in actual research and engineering, the dynamic performance under the low frequency conditions is more considered, it can be ignored. Thus, in brief, the correctness of research on identification for dynamic parameters of the sliding joints based on DNN modeling in this paper is verified.
Conclusions and future work
This paper presents a new method to study the dynamic parameters identification for sliding joints of surface grinder based on DNN modeling. Firstly, the theoretical modal analysis is conducted to obtain the datasets. Then, the DNN model of dynamic parameters is designed and trained adequately. Next, the experimental modal test is carried out by LMS. Lastly, combined the predicted values with the experimental results of the natural frequencies for sliding joints, the stiffness and damping parameters can be identified by cuckoo search algorithm. Additionally, the identified parameters are used to theoretical modal analysis, the final relative errors between the theoretical value and the experimental result are all less than 2.2%, which achieves high precision.
The main contribution of this paper is that the proposed method makes the effectiveness of modeling for surface grinder sliding joints realized which is of great modeling accuracy. Moreover, the designed DNN model is utilized to reflect the mapping relationship between the stiffness, damping and the first six order natural frequencies, so that the stiffness and damping can be identified accurately. Furthermore, it is of certain reference and promotion values for multi-input and multi-output, high nonlinear and strong coupled dynamic models.
The surface grinder is a complex mechanical system, which contains various types of joints affecting the dynamic performance of the machine tool jointly. Therefore, in future work, we will be devoted to the study on dynamic performance that with more types of more joints coupling. Besides, establishing more accurate theoretical model via better methods will be considered, such as refining mesh. In addition, we will try to solve the mechanical dynamic problems with higher-dimensional data by other deep learning models.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by National Natural Science Foundation of China (No. 51775323 and 51375289)