
Abstract
The flow shop scheduling problem has been widely studied in recent years, but the research on multi-objective flow shop scheduling with green indicators is still relatively limited. It is urgent to strengthen the research on effective methods to solve such interesting problems. To consider the economic and environmental factors simultaneously, the paper investigates the multi-objective permutation flow shop scheduling problems (MOPFSP) which minimizes the makespan and total carbon emissions. Since MOPFSP is proved to be a NP-hard problem for more than two machines. A hybrid cuckoo search algorithm (HCSA) is proposed to solve the problems. Firstly, a largest-order-value method is proposed to enhance the performance of HCS algorithm in the solution space of MOPFSP. Then, an adaptive factor of step size is designed to control the search scopes in the evolution phases. Finally, a multi-neighborhood local search rule is addressed in order to find the optimal sub-regions obtained by the HCSA. Numerical experiments show that HCSA can solve MOPFSP efficiently.
Introduction
Recently, with the increasingly severe environmental problems in the manufacturing industry, the green manufacturing has received considerable attention.1,2 The problem model studied in this paper contains environmental indicators, which meets the current needs of ecological environment governance. According to a survey by Fang et al., 3 most of the world’s energy consumption comes from the industrial sector, and manufacturing companies have become one of the main factors for global warming. On the one hand, the control of greenhouse gas emissions by laws and regulations makes manufacturing companies have to limit carbon emissions; on the other hand, the high taxes brought by carbon emissions also make manufacturers seek practical and feasible ways to processed products. 4
Scheduling time, processing cost, and product quality are the three most common optimization indicators for traditional production scheduling problem. 5 When the environmental and energy-saving problems are increasingly severe in the manufacturing industry, green indicators and economic indicators should be considered at the same time in order to meet the scheduling demands. The multi-objective permutation flow shop problem (MOPFSP) with green indicators studied in this paper has a strong industrial background. 6 In terms of computational complexity, the permutation flow shop scheduling problem (PFSP) of more than two machines has been proved to be an NP-hard problem, 7 so MOPFSP also belongs to the NP-hard problem. In summary, it is of great engineering and academic significance to solve the MOPFSP with green indicators.
In the past few decades, the MOPFSP and green manufacturing has been studied extensively. However, only few researchers have considered both economic and environmental indicators. Luo et al. 8 designed an ant colony optimization method to address the multi-objective mixed FSP with power consumption. Ding et al. 9 studied the multi-objective flow shop scheduling problem with total carbon emissions, and proposed an improved iterative greedy algorithm. Liu et al. 10 proposed an adaptive multi-objective genetic algorithm that can effectively address a class of pipeline shop scheduling problems with two optimization indicators of carbon emissions and total weighted delay. Ding et al. 11 addressed an iterative greedy algorithm based on non-dominated solution structure characteristics for solving the dual-objective flow shop scheduling problem with total carbon emissions. Tang et al. 12 presented a modified particle swarm optimization algorithm, which can solve the flexible flow shop scheduling problem based on the two goals of energy consumption and maximum completion time. Lu 13 proposed a hybrid multi-objective backtracking search algorithm based on machine setup time and workpiece transportation time to solve the MOPFSP with energy consumption. Wang and Tian 14 established a dual-objective optimization model for the selection of milling parameters such that power consumption and process time are minimized, and proposed an improved artificial bee colony (ABC) intelligent algorithm to handle the dual-objective optimization mode. Fu and Tian 15 proposed a scheduling model can make an interaction between the energy consumption and the production cost to realize an efficient and sustainable production process. In summary, the research on MOPFSP with green indicators is still relatively limited, and it is urgent to develop effective methods for solving such important problems.
The CS (cuckoo search) algorithm is an algorithm that effectively solves the optimization problem by simulating the brood parasitism of some species of cuckoos that proposed by Yang and Deb. 16 This algorithm searches according to the flight mechanism of cuckoos at the time of spawning, which can quickly and efficiently solve continuous optimization problems. 17 Compared with other meta-heuristic algorithms, Cuckoo’s algorithm has better performance and efficiency in solving multi-objective optimization problems. Sheli and Chaudhuri 18 verified the CS algorithm and compared with some classical Algorithms: GAs and PSO. From simulation and comparison, it is evident that CS is much better and efficient than the GAs and PSO for multi-objective functions. This is because in the case of CS, there are fewer parameters that require precise control. It is clear that once the number of nests is fixed, there is only one parameter discovery probability that needs to be adjusted. It should be noted that in the absence of discovery probability interference, the CS convergence speed of all the above test functions is very fast and the efficiency is high. Therefore, compared with other meta-heuristic algorithms, CS is more versatile and robust in many optimization problems. The robust optimization algorithm can be easily applied to multi-objective optimization problems. In recent years, the CS algorithm has also been extended to solve single-objective production scheduling problems with economic indicators. Li and Yin 19 used NEH heuristics to generate part of the initial population and designed a hybrid CS algorithm with local search to solve the single-objective PFSP problem. Marichel et al. 20 designed NEH rules to initialize part of the population at the initial stage of the CS algorithm, and then used it to solve a single-objective multi-stage mixed-line shop floor scheduling problem. Alaa and Alobaidi 21 improved the Lévy flight equation in the CS algorithm, and enhanced the search for the optimal individual neighborhood of the population. The proposed algorithm was used to solve the single-objective flexible job shop scheduling problem. Wang et al. 22 used the NEH rule to generate part of the initial population, and then proposed a Cuckoo algorithm with local search for solving a single-target pipeline shop scheduling problem. Zhang et al. 23 proposed a dynamic adaptive cuckoo search algorithm (DACS). They introduced feedback into the algorithm framework, established a closed-loop control system for the parameters of the CS algorithm, and used Rechenberg’s 1/5 rule as an evolutionary evaluation index. However, the above literatures set the step size control factor to a certain constant and did not adjust it dynamically. In fact, as the number of iterations of algorithm increases, if the step size control factor is set too large, the cuckoo algorithm’s search tends to deviate high quality solution region, resulting poor performance; if the step size control factor is set too small, the algorithm is easy to fall into a local optimum and premature. Therefore, it is of great significance to design cuckoo algorithm that can dynamically adjust step size control factor to solve the green flow shop scheduling problem.
A hybrid cuckoo search algorithm is proposed to solve MOPFSP with the objective of minimizing the completion time and total carbon emissions in this paper. on one hand, an adaptive adjust strategy for step size control factor is presented to make the cuckoo algorithm have faster convergence speed and better global search performance; on the other hand, a multi-neighbor local search mechanism is also designed to improve the performance of HCS algorithm. To this end, a better balance between global and local search of the algorithm is achieved. Finally, the effectiveness of HCS is verified through simulation experiments and algorithm comparison.
Problem statement
Low carbon MOPFSP descriptions
Production scheduling is to allocate a set of machining tasks in time to an available set of machining machines to meet a performance index. 24 It mainly consists of two factors: performance indicator and scheduling schemes.25,26 The performance indicators of production scheduling are classified into three categories: maximum capacity indicators, cost indicators, and customer satisfaction indicators. 27 Among them, the maximum capacity indicators include minimizing the maximum completion time and maximum productivity. The cost indicators include minimizing operating costs and maximizing revenue. 28 Customers satisfaction indicators include minimizing early or late penalties. Additionally, green indicators like energy consumption, carbon emissions have been considered in recent years.
The scheduling scheme generally represents a solution to a production scheduling problem, which is the arrangement of the processing order of processing workpieces on various machines. 29 It can be usually expressed by a Gantt chart, as shown in Figure 1.
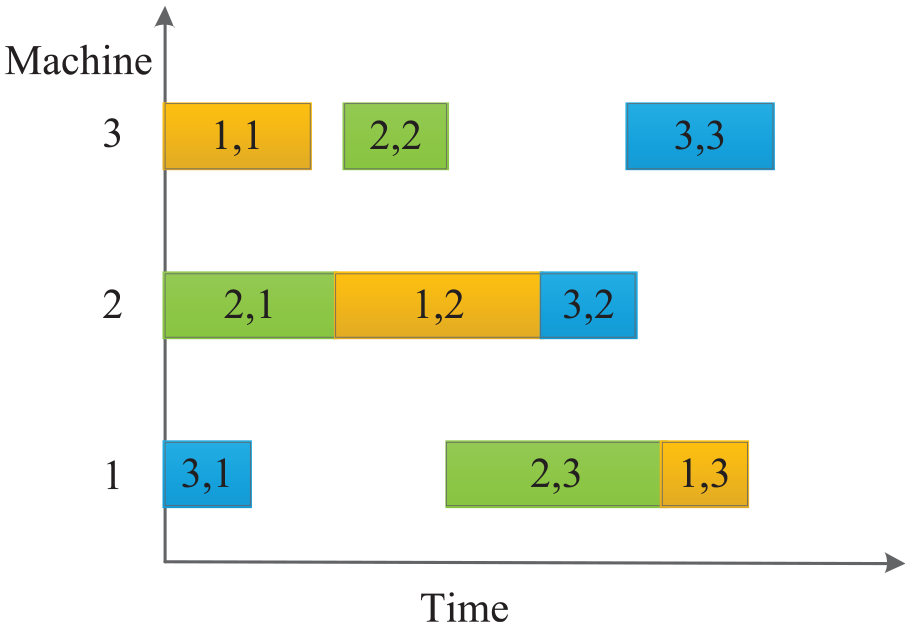
Gantt chart.
According to the description of the mentioned above, the MOPFSP with low carbon can be introduced as follows. There are m machines in the shop floor. The workpieces set is J = {1, 2, …, n}. The machine set is M = {1, 2, …, m}. The speed set is S = {v1, v2, …, vs}. Ti,k represents the standard machining time of workpiece i on machine k; Vi,k represents the machining speed of workpiece i on machine k; Ti,k/Vi,k represents the real machining time of workpiece i when machining on machine k at speed Vi,k. Qk,v represents the unit energy consumption when machine k works at speed v; Qk represents the unit energy consumption when machine k is in standby state. When machine k works at speed v at time t,
Two processing rules of PFSP are given: ① After the workpiece I∈J is processed on the machine (k − 1) ∈M, the workpiece j∈J can be processed on the machine k∈M. ② Each machine cannot process multiple workpieces at the same time. Assume that the workpieces j1 to jm are sequentially processed on machine 1 to machine m in order. Therefore, the multi-objective models of PFSP can be described based on economic and environmental indicators.
For the economic indicator, the longest completion time is considered. Its mathematical model is written as

For the green indicator, assuming

Among them, CT represents total energy consumption;
In order to calculate the total CO2 emission, a rate matrix An×m for the machine needs to be constructed, where

Where A31 represents the machining speed of third workpieces when machining on first machine is 3.
Furthermore, the constraints of the low carbon MPFSP are given in the following.




For the low carbon MPFSP, it is impossible to obtain the global optimal solution of makespan and TCE simultaneously. But a set of solutions can be obtained: the continued optimization of any one target must sacrifice the effective solution of other objective function values.27,30 The set of such effective solutions is called a non-inferior solution, which is a Pareto solution set.
Related concepts of multi-objective problem
In this article, MOPFSP is described as follows:



Where
(1) Dominate.
For the target vectors
(2) Pareto optimal solution.
For
(3) Pareto frontier.
For Pareto frontier PF:
(4) Pareto solution set.
For Pareto solution set P:
Hybrid cuckoo algorithm
Standard Cuckoo algorithm
The CS (cuckoo search) algorithm can effectively solve the optimization problem by simulating the brood parasitism of some species of cuckoos. 31 Lévy-flights is a kind of action mode, the step size of random walk satisfies a heavy-tailed stable distribution. In this form of walking, the exploratory jumps of short distance and occasionally the longer distances working are interspersed. The trajectory of Lévy-flights on a two-dimensional plane is shown in Figure 2. 32

Lévy-flights motion diagram on a two-dimensional plane.
The flight of many animals in nature conforms to the Lévy-flights model, and the flight of cuckoo is one of them. 33 When the cuckoo is searching, its flight path is the combination of various long and short distances. Each distance differs from the previous distances by a small angle. 34 Short distances occur most frequently, while the longer distances are rare. Lévy-flights may seem disorganized, but it is not. The distances and the angle of deviations follow a very definite statistical distribution. Through long-term observation of the cuckoo’s living habits, it is found that cuckoos only lay eggs and do not build nests. 35 And their eggs often lay in the nests of different birds. Inspired by this nature phenomenon, a new search algorithm–cuckoo search algorithm (CS) in cuckoo’s nest-seeking behavior is proposed. 36 Each nest represents a potential solution. The host bird may find that the egg is not its own egg. It may abandon the egg and or the entire nest. Cuckoo birds lay eggs in this way, so that the nest position is continuously optimized.
The pseudocode of the standard cuckoo search algorithm is given in Table 1.
The standard cuckoo search algorithm.

The flowchart of the standard CS algorithm is given in Figure 3.
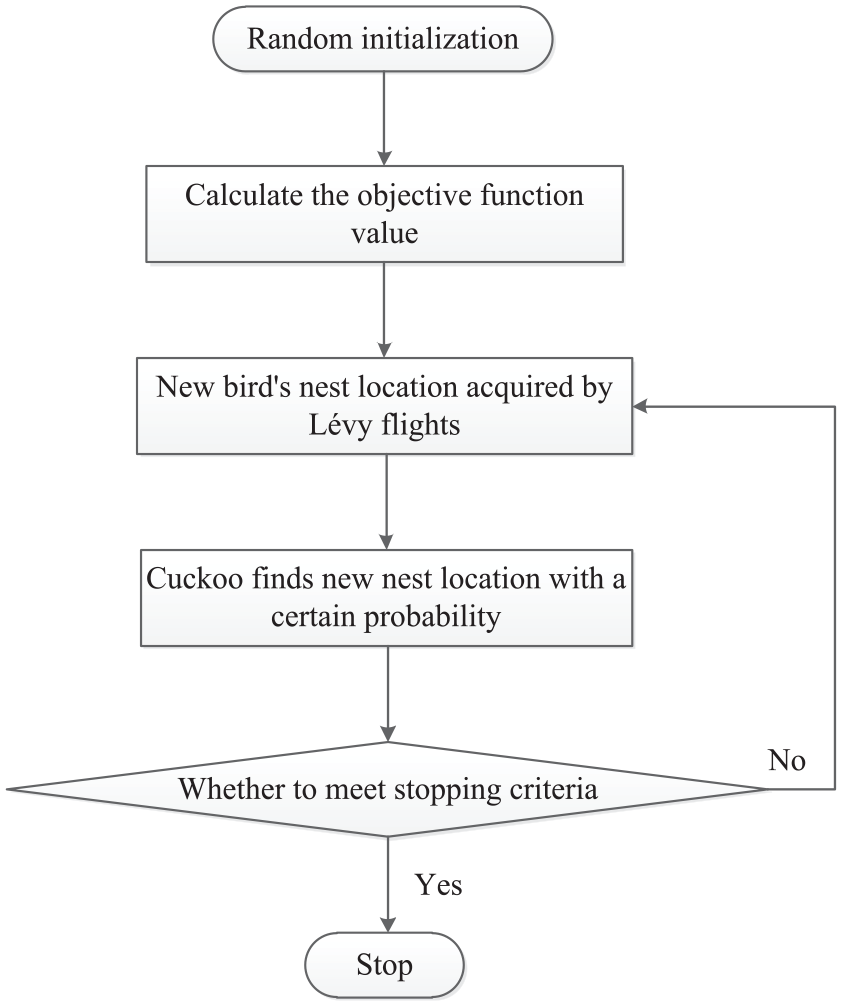
Flowchart of the standard CS algorithm.
There are two ways to update individuals in the cuckoo search algorithm, the first is to use Levi’s flight equation:

Among them,
As can be seen from equation (11), this distribution makes a continuous distribution of cuckoo birds form a probability distribution with heavy tails, which can expend the search range, increase population diversity, and easily converge to global optimum.
The second update method is to determine whether to generate new individuals according to the relationship between a fixed discovery probability

Among them,

Hybrid cuckoo algorithm
Adaptive step size factor
Although the CS algorithm is more effective than other swarm optimization algorithms, it has its own inherent shortcomings: Levi’s flight is a Markov chain, which is only related to the current situation and has large randomness. Therefore, convergence accuracy and search depth are two shortcomings of the CS algorithm. The CS algorithm defines a step size control factor
In this paper, the standard cuckoo search algorithm is improved from step size control factors: replacing fixed step size control factors with dynamic step size control factors. In the optimization process, when the individual quality gradually improves, the search scope is appropriately reduced to strengthen the search depth, which is conducive to searching for better solutions. The reasonable step size control factor should gradually decrease with the increase of the evolutionary algebra, so that the algorithm can easily find high-quality individuals in the later stage of evolution.
This paper adaptively adjusts the step size control factor

Where, R is the ratio of the current evolution generation to the total evolution generation;
Multi-neighborhood local search
In order to further improve local search accuracy of the cuckoo algorithm, a multi-neighborhood local search strategy is proposed in this paper to perform fine search based on different neighborhoods. Specifically, it performs a local search based on three neighborhoods on individuals in the current non-inferior solution set of the algorithm. The three neighborhood searches are: interchange local search, insert local search, 2-opt local search. The specific definitions are as follows:
Interchange local search: Sort each workpiece, randomly select two different locations, and exchange the workpiece at the location. For example, 10 workpieces are sorted as [4, 2, 7, 1, 3, 5, 9, 8, 10, 6], and two positions p1 = 3 and p2 = 9 are generated randomly. Nine workpieces 10 swap positions and get a new sort [4, 2, 10, 1, 3, 5, 9, 8, 7, 6]. Then, the workpiece 7 at position 3 and the workpiece 10 at position 9 are exchanged to obtain a new order [4, 2, 10, 1, 3, 5, 9, 8, 7, 6].
Insert local search: This step can be divided into front insert and post insert. Sort the workpieces of each individual and randomly select two different positions p1 and p2, assuming p 1 > p 2 . Post-insertion means inserting the workpiece at position p1 into position p2, and the workpieces at positions p1+1 ∼ p2. Move forward one position; Insert forward refers to insert the workpiece of position p2 into position p1, and the workpieces of positions p1 ∼ p2 − 1 are moved backward one position. For example, the 10 workpieces are sorted as [4, 2, 7, 1, 3, 5, 9, 8, 10, 6], and two positions p1 = 3 and p2 = 9 are randomly generated. According to the above, after inserting, the new order is [4, 2, 1, 3, 5, 9, 8, 10, 7, 6,], and the new order obtained by the previous insertion is [4, 2, 10, 7, 1, 3, 5, 9, 8, 6].
2-opt local search: Sort each workpiece, randomly select two different positions p1 and p2, and sort the workpieces of p1 ∼ p2 in reverse order. For example, 10 workpieces are sorted as [4, 2, 7, 1, 3, 5, 9, 8, 10, 6], and two positions p1 = 3 and p2 = 9 are randomly generated. According to the above, the new order is [4, 2, 10, 8, 9, 5, 3, 1, 7, 6].
Let
The disturbance phase. ① Let k = 0; ② Randomly select 2 different positions p1 and p2,
Exploration phase. ① Set k = 0, t = 0; ② randomly choose two different positions p1 and p2; if
Steps of HCS algorithm to solve MOPFSP
The main steps to solve MOPFSP based on the improved HCS algorithm are as follows:
Parameter initialization. Set the population size N; the upper and lower bounds of individuals, and initialize the population W within the bounds; set the maximum number of iterations
Individual discretization. The LOV rule is used to transform continuous individuals into discrete sorting; two objective function values for each individual are calculated.
Individual update. An individual
Application of abandonment probability. Determine whether to operate on the individual
Keep the Pareto front. The non-dominated principle is used to find the Pareto front of the current generation, and the individuals of the Pareto front of the current generation are stored in the Pareto solution set
Multi-neighborhood search. The multi-neighborhood search is performed on the sort order corresponding to each individual
Record the current Pareto solution set. Fuse the updated Pareto solution set
The step size control factor
(9) Termination conditions. If the current number of iterations is less than the maximum number of iterations
Based on the above steps, the algorithm flow chart of using HC algorithm to solve MOPFSP is shown in Figure 4.

Flow chart of HCS.
Numerical experiments
In order to verify that the algorithm in this chapter is feasible and effective, this chapter first selects six classic benchmark test functions for verification as shown in Table 2.
Test function.

In this experiment, a simulation program written in MATLAB 7.1 was used. The operating environment was a Windows 7 professional operating system. The hardware configuration was a Celeron (R) Dual-core CPU T3100, a 1.90 GHZ processor, and a 2G memory laptop.
Among the six benchmark test functions, there are both high-dimensional and low-dimensional functions. Perform 20 independent experiments on each of them to find the minimum, maximum, average, and variance, and compare them with the basic cuckoo algorithm. It can be seen from Table 3 that for the minimum, maximum, or average value of HCS, the calculation accuracy is significantly improved compared with the basic CS. Meanwhile, the optimal solution obtained by HCS is closer to the theory value. The optimal values of functions
Experimental comparison between CS and HCS.

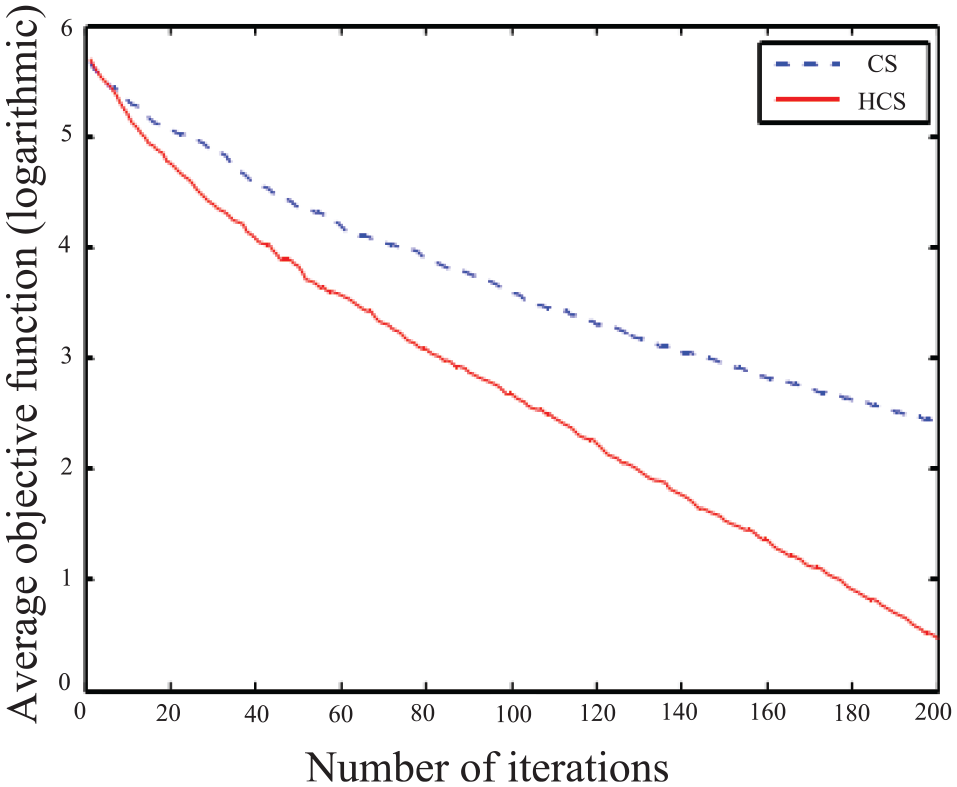
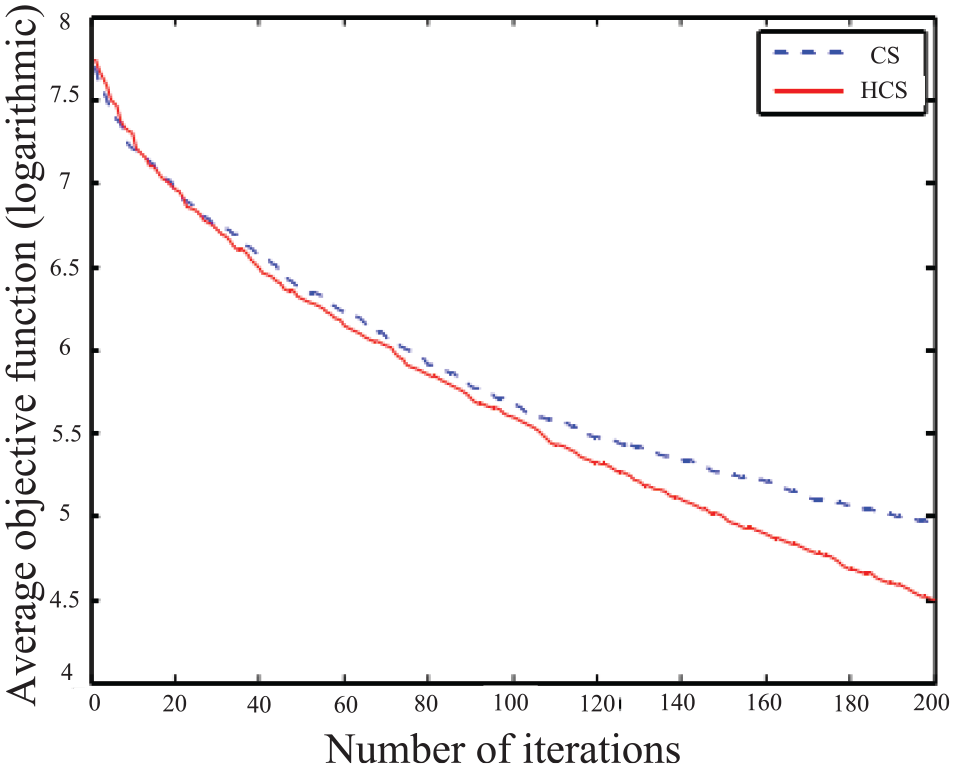
The following shows the convergence curve of the average fitness of the six test functions in 20 independent experiments. The ordinate of Figure 9 is the average fitness, while the other graphs are all the log of the average fitness.
Figures 5 to 10 are the convergence curves of the HCS and CS algorithms in this chapter. It can be intuitively seen that the HCS algorithm converges faster than the CS algorithm and has fewer iterations.




To further verify the effectiveness and superiority of the HCS algorithm to solve MOPFSP, this paper selects 10 kinds of test instances with different sizes, and use the standard CS algorithm and INSGA-II algorithm 37 for comparison experiments.
In the test problem, the processing time of the of the workpiece on each machine is generated according to the size of the problem using random number ranging from [1, 100]; the machine speed gear was set to
Matrix experiments with L9(34).

The Rastrigin benchmark function is used to test the HCS performance, (x, y) ∈ [−5,5]. As shown in Figure 11, this function has many local minimum points in the domain of definition, which has strong oscillation characteristics. During the test, the maximum number of iterations per run is 1000, and the error is less than 10−6. Each function is optimized 20 times, and then the average number of iterations is taken. The test results are shown in Table 5.

Space map of Rastrigin function.
The performance of HCS.

It can be seen from Table 5 that when the step size control factor
In the INSGA-II algorithm, the mutation probability is 0.3 and the crossover probability is 0.9. In the CS algorithm, the abandonment probability is 0. 25; the step size control factor is 0.01. This paper uses 50n (unit: ms) as the termination condition for each algorithm, where n is the number of work piece of each problem size. This allows all algorithms to run at the same time when testing the same problem size, ensuring fair comparisons. Each algorithm runs independently 20 times for test problem.
The analysis indicators used is this paper are multi-objective analysis indicators proposed in literature,
38
which are


Where
The data results of each problem size in this paper can be found in Tables 6 and 7. The comparison data of HCS algorithm and CS algorithm are shown in Table 6. The comparison data of HCS algorithm and INSGA-II algorithm are shown in Table 7. According to the definition of S above, S in Table 6 can be expressed as
Statistical results of HCS and CS.

Statistical results of HCS and INSGA-II.
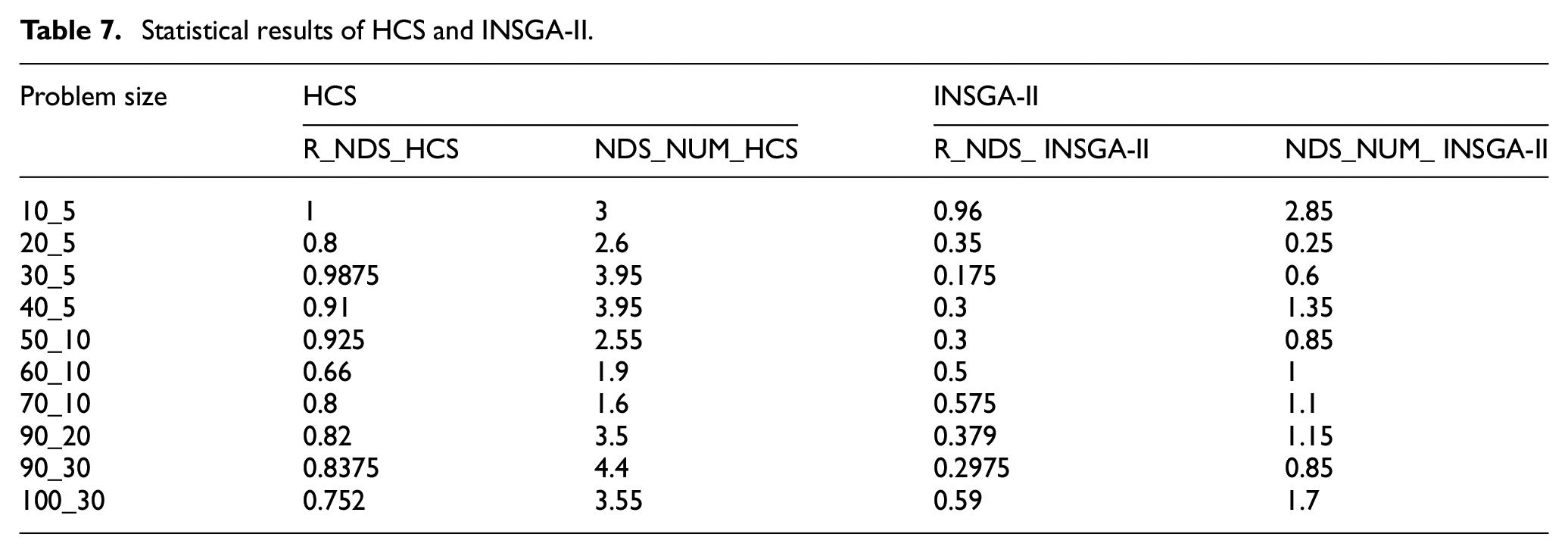
It is obvious that

A Pareto solution point graph of three algorithms when the problem size is 10_5.

A Pareto solution point graph of three algorithms when the problem size is 100_30.
The comparison results between the INSGA-II and HCS from running times are shown in Figure 14. We can clearly see that the running time of INSGA-II is much longer than HCS when the size of instances is large, and INSGA-II get fewer effective solution compare to HCS. Therefore, the HCS algorithm has better solution speed when solving large-size instances problem.

Running time of algorithms.
To sum up, HCS algorithm is more efficient than INSGA-II algorithm and CS algorithm in solving MOPFSP of all the above problem sizes.
At the same time, the HCS algorithm was used to investigate the wire and cable production scheduling problem of a wire and cable factory in Jiangsu Changzhou. The production process of the factory’s pre-formed cable consists of five steps: monofilament drawing, monofilament annealing, conductor stranding, insulation extrusion, and cable formation. The five links are processed on five specific machines, and the processing machines in each link can set the processing speed by adjusting the gear. In recent years, the company has actively responded to green production, energy saving, and energy reduction, and considered both economic indicators (makespan) and environmental indicators (TCE) in its production process. Obviously, the production scheduling problem of this pre-formed cable is a typical MOPFSP. At present, the production scheduling of this cable factory is manually ordered and scheduled by the dispatcher based on experience after number the work piece. This paper uses the actual production data of 30 types of cables produced by the factory as test examples, and uses the HCS algorithm to run a 1.5 s solution. The target value comparison of HCS algorithm is shown in Figure 15.
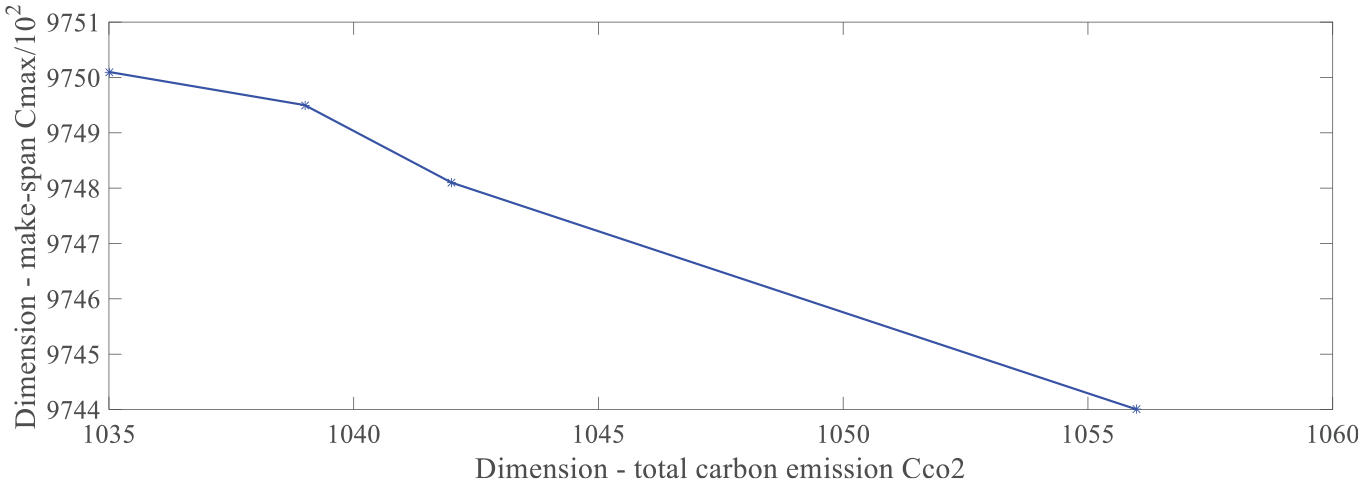
HCS target value comparison.
Furthermore, the dispatcher is asked to give a manual dispatching plan within 5 min. The HCS algorithm obtained the scheduling scheme S1–S4. The scheduling scheme T1 obtained by dispatcher through experience is shown in Table 8. As can be seen from Table 8, S1–S4 are significantly better than T1. The results show that the HCS algorithm can solve practical MOPFSP problems quickly and effectively.
Scheduling plan.

Conclusion
Nowadays, with the increasingly severe environmental problems in the manufacturing industry, the green manufacturing has received considerable attention. Although the flow shop scheduling problem has been widely studied in recent years, but the research on multi-objective flow shop scheduling with green indicators is still relatively limited. In this research a hybrid cuckoo algorithm is proposed to solve the green MOPFSP with environmental indicators, which meets the current needs of ecological environment governance. The main contributions of this paper are as follows:
The LOV rule is used to transform the individuals in the HCS algorithm from the real number vector to the workpiece ordering, so that it can be easily searched in the solution space of MOPFSP;
An adaptive step size control factor is designed to control the search range of the evolution phase of the algorithm and makes the algorithm easy to find high-quality individuals in the later stages of evolution;
An multi-neighborhood local search method is proposed for detailed search of high-quality solution regions, so that the high-quality solution area found by the global search of the HCS algorithm can be searched more carefully;
The HCS algorithm uses the proposed adaptive step size control factor and multi-neighborhood local search to balance the global and local search of the algorithm, and improves the performance and convergence speed of the algorithm. The results of simulation and algorithm comparison show that HCS algorithm can solve MOPFSP quickly, and its performance is better than CS algorithm and INSGA-II algorithm. The effectiveness of the HCS algorithm in solving MOPFSP is verified.
Some future works may be done from following aspects: (1) Regarding the future research of cuckoo algorithm in complex production scheduling, we can consider extending it to more complex scheduling problems than MOPFSP, especially the uncertain green scheduling problem. (2) It is interesting to present some heuristic algorithms to generate initial population instead of random procedure used in this paper so as to further improve the algorithms performance.
Footnotes
Acknowledgements
The authors would like to thank the referees for their helpful comments and suggestions.
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper is supported by National Science Foundation of China (No. 51875171), and the Fundamental Research Funds for the Central Universities (2019B21614).