
Abstract
Aiming at the problem that the standard cuckoo search algorithm relies on Levy flights, which leads to the step-size randomness of the search process, a self-adaptive step cuckoo search algorithm based on dynamic balance factor is proposed in our paper. First, two parameters are introduced in our paper, which were iteration number ratio parameter and adaptability ratio parameter. Then, a dynamic balance factor parameter is introduced to adjust the weight number of iteration number ratio parameter and adaptability ratio parameter. Finally, parameter skewness value calculation method and self-adaptive step strategy were proposed combined with the dynamic balance factor. Six typical test functions are used to test the performance of the proposed algorithm, the standard cuckoo search algorithm and the self-adaptive step cuckoo search algorithm which relies only on the iterative times. The test results show that the proposed algorithm had good convergence speed and accuracy. Meanwhile, taking the permutation flow shop scheduling problem as an example, eight operators of Car benchmark class are used as the test data to compare the performance of three algorithms, the effectiveness and superiority of the algorithm in solving the permutation flow shop scheduling problem are verified.
Keywords
Introduction
The permutation flow shop scheduling problem(PFSP) is a production scheduling problem that is based on constraint of the flow shop scheduling problem. Meanwhile, it further increases the constraint that all workpieces have the same processing order on any machine. The scheduling optimization can effectively improve the production efficiency of enterprises. 1 Although the process constraint of PFPS is relatively simple, it has been proved in the field of flexible manufacturing industry that PFSP with more than three machines participating in the production process is a typical NP-complete problem, and there is no global optimization algorithm with polynomial computation complexity. 2 The methods of solving PFSP mainly include precise algorithm, heuristic method and intelligent algorithm. 3 The precise algorithm has large computational complexity and is only suitable for solving small-scale problems. The heuristic method can construct the solution in a short time according to the characteristics of the problem, but it is difficult to guarantee the quality of the solution. With the development of computational intelligence, intelligent algorithms for solving PFSP have been widely studied, such as genetic algorithm, 4 particle swarm optimization, 5 differential evolution, 6 cuckoo search, 7 and various hybrid algorithms. 8
The cuckoo search (CS) algorithm is a new heuristic algorithm proposed by professor Xin-She Yang and S. Deb of Cambridge University in 2009. 9 It simulates and solves complex optimization problems by simulating the brooding behavior of cuckoos and the Lévy flight patterns of animals such as albatrosses and fruit flies. Due to its simple model, few parameters and high search efficiency, the CS algorithm has been widely applied to various development fields such as artificial intelligence, industrial scheduling, commercial optimization, neural networks and other fields. 10 In general, the performance of the algorithm is not only affected by evolutionary operators. The selection of parameters also affects the quality and speed of the result. In the standard CS algorithm, the Lévy flight is used to generate random step-size, but the step-size is varying. If the step-size is set too small, the algorithm will be biased towards local search, which will accelerate the convergence of the algorithm, but it is easy to produce the premature phenomenon, making the algorithm fall into the local optimal solution. If the step-size is set too large, the algorithm will be biased towards the global search. This will help the algorithm to jump out of the local optimal solution, but it will affect the convergence speed of the algorithm. Therefore, its value needs to be reasonably set according to the feasible region of the problem. In order to improve the reasonableness of the step-size setting of the CS algorithm, many scholars at home and abroad have carried out relevant researches to improve the step-size setting of the standard CS algorithm. For example, the modified cuckoo search algorithm proposed by H. Jiang et al. adapted the step-size control factor by the current fitness and the initial worst fitness, which enhances the local search ability of the algorithm.11 R.Y. Li et al. introduced the dynamic inertia weights and memory strategies in the preferred random walks by adaptively changing the search step-size in the process of optimization and realized the overall dynamic adjustment of the algorithm.12 W.Y. Qian et al. proposed an adaptive parameter control strategy to dynamically adjust the step-size factor in the CS algorithm to enhance the search performance of the algorithm.13 E. Valian et al. proposed an improved cuckoo search (ICS) algorithm by dynamically adjusting the discovery probability and step-size factor in the standard CS algorithm, which effectively improves the accuracy of the algorithm.14 E. Valian et al. proposed a self-adaptive step cuckoo search algorithm, which improves the search accuracy of the algorithm.15 L.J. Wang et al. added a compression factor that obeys [0,1] uniform distribution in the updated equation of Lévy flight, which is better than the standard CS algorithm. 16 Z. Jian et al. proposed a self-adaptive step-size and some neighbor-study strategies to enhance search performance, and an improved lambda iteration strategy was used to generate new solutions. 17 J.T. Cheng et al. introduced the memory mechanism into CS algorithm to dynamically select the appropriate step-size, which differs from many CS variants by incorporating some existing algorithms into CS framework. 18 A reinforced cuckoo search algorithm for multimodal optimization was proposed by T. Kalaipriyan et al., in which a self-adaptive step-size has been introduced to achieve multimodality in the proposed algorithm. 19 Yung, C.S. presented an improved cuckoo search algorithm, considering the effects of coevolution on the displacement dynamics of animal communities, and applied it to the development of maximally distributed physical arrangements. 20 From the several improved algorithms in the above papers, we can see that in the process of searching for the optimal solution, the step-size factor of them gradually decreases with the algorithm iteration process to enhance the local search ability of the algorithm so as to accelerate the convergence speed in the later period. However, these strategies that solely rely on the number of iterations or the fitness or the bird’s nest distance ratio to improve the step-size factor do not balance the convergence speed and the search accuracy during the operation of the algorithm. In some cases, with the increase of the number of iterations, the algorithm falls into some problems such as local optimization, low accuracy, precocity and so on. Moreover, when dealing with complex multi-peak functions, it will lead to large time overhead and low efficiency, and may even make the algorithm converge less accurately than the standard CS algorithm.
Based on the theoretical significance and application value of solving PFSP and the deficiency of the standard CS algorithm, a self-adaptive step length cuckoo search algorithm based on dynamic balance factor is proposed in this paper, which is named as dynamic cuckoo search (DCS) algorithm. Two parameters, iteration number ratio parameter and adaptability ratio parameter, are introduced in the proposed method. A dynamic balance factor
Standard cuckoo search algorithm
Inspired by cuckoo breeding behavior, the standard CS algorithm is a global intelligent optimization algorithm which imitates cuckoo's searching nest and spawning process in nature by introducing the Levy flight mechanism of birds. The standard CS algorithm is inspired by the behavior of cuckoo brooding. It introduces the Lévy flight mechanism of birds to simulate the process of cuckoo search for nests and spawning in nature. It belongs to the global intelligent optimization algorithm. Professor Yang and Deb proposed the following three ideal states set for the algorithm
21
:
The cuckoo lays only one egg during each generation and randomly selects a bird nest to hatch. Before finding a better bird nest, take the current best bird nest as the generation's host for the next reproduction. The total number of bird nests available for each generation is constant, and the probability that a cuckoo egg is found by the host is
Where
The standard CS algorithm realizes the simulation process of cuckoo search for the nest by producing candidate population, selecting optimal choice and randomly migrating. On the basis of the above three ideal states, the cuckoo searches route and position according to equation (1) and then produce candidate populations:

Among them:
The relationship between Lévy flight random optimization route and the time

To implement the CS algorithm, the method in reference
9
was used to simulate a flight jump path, which is the step-size, as shown in equation (3):

Among them:
In the actual optimization problem, the location of the bird nest
As far as the step-size control of the CS algorithm is concerned, the Lévy flight random walk strategy is adopted by the CS algorithm to generate a new step-size, but this randomness has no regularity and lacks self-adaptation to the algorithm process. In the standard CS algorithm, the step-size factor
Self-adaptive step cuckoo search algorithm based on dynamic balance factor
Algorithm improvement ideas
Through the analysis of the standard CS algorithm and related research results, we can know that the step-size factor
Based on the above-mentioned two points, by introducing the number of iterations ratio and the fitness ratio, this paper realizes the dynamic adaptation to the parameter skewness

Among them,
Improved algorithm implementation process
According to the proposed improvement idea, the algorithm implementation process can be described as shown in Figure 1.
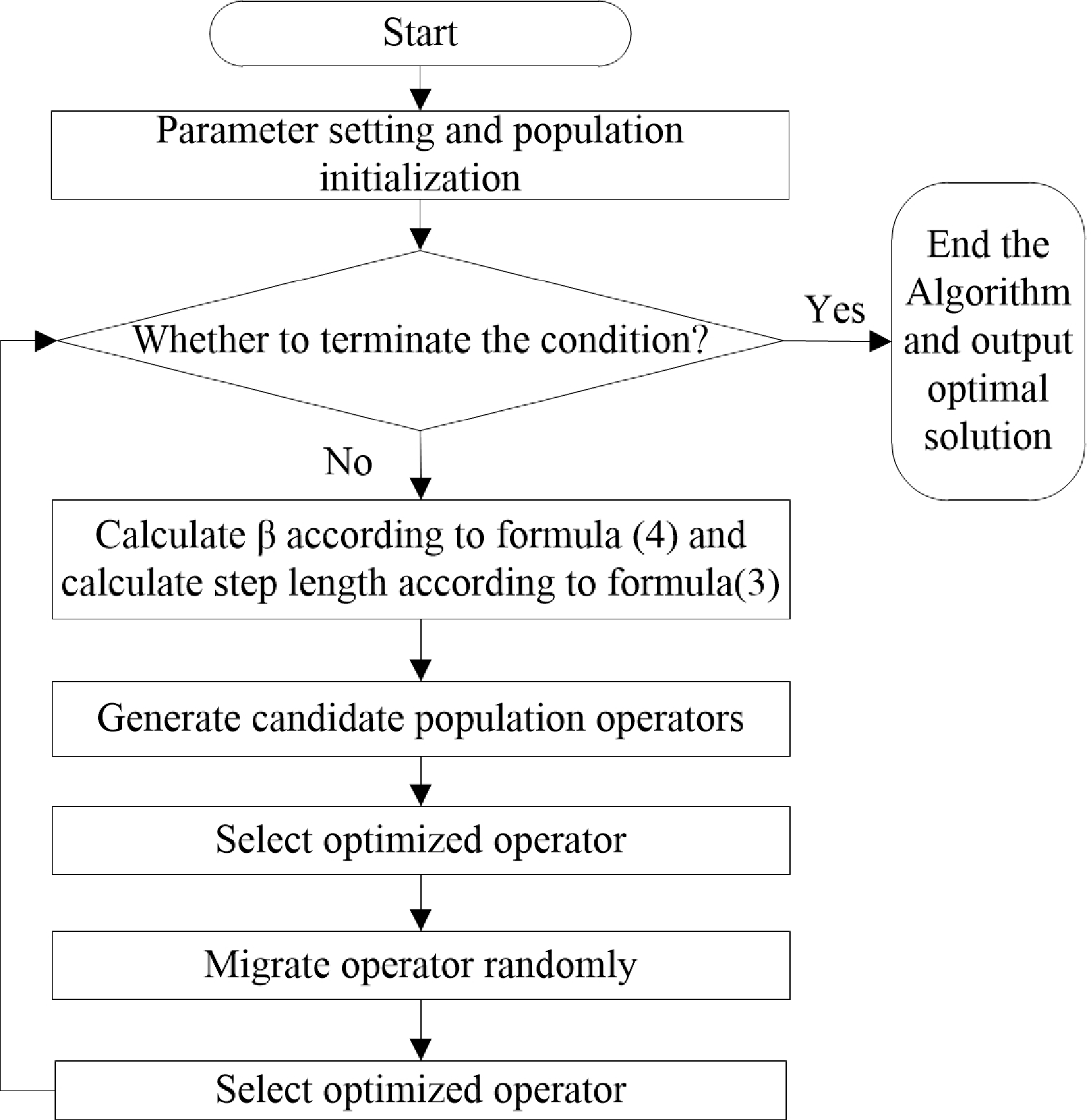
Self-adaptive step cuckoo search algorithm based on dynamic balance factor.
Improved algorithm simulation and result analysis
Simulation environment and parameters setting
The simulation test environment of this paper is as follows: Windows 10 operating system, Inter Core CPU T6400 2.10 GHz, 2.00 GB memory, MATLAB 2014 b simulation software. Use the six common test functions shown in Table 1 for testing. The tested algorithm is the standard CS algorithm, the ICS algorithm proposed in reference14 and the DCS algorithm proposed in this paper. The validity of the proposed algorithm is verified by comparing the test data. The initial ranges of the six test functions in Table 1 are as follows:
Six common test functions.

The value range of Ackley is
The value range of Griewank is
The value range of Rastrigrin is
The value range of Rosenbrock is
The value range of Schwefel is
The value range of Sphere is
Experiment simulation and result analysis
In the algorithm simulation experiment, the initial discovery probability of the standard CS algorithm and the ICS algorithm is set to
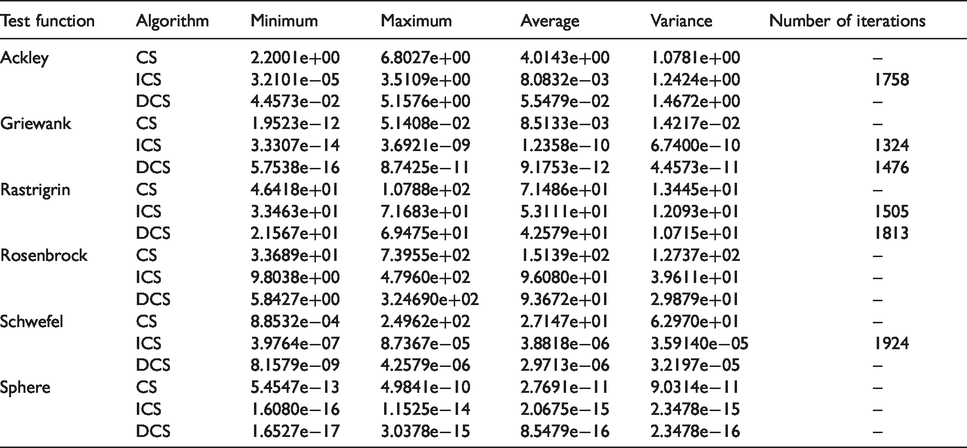
Test data of six test functions based on CS, ICS and DCS algorithms (where N = 10).

Test data of six test functions based on CS, ICS and DCS algorithms (where N = 30).

Test data of six test functions based on CS, ICS and DCS algorithms (where N = 50, T = 2000).
Test data of six test functions based on CS, ICS and DCS algorithms (where N = 50, T = 3000).
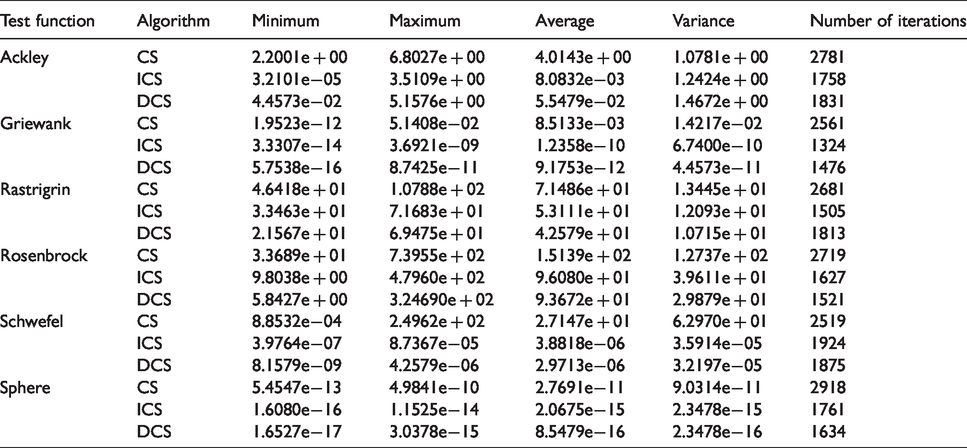
According to the related optimization test data in Tables 2 to 5, it can be seen that:
When the dimension When the dimension When the dimension When the dimension
Application of improved algorithm in permutation flow shop scheduling problem
Scheduling problem description
The basic flow of PFSP can be described as follows
25
: n components are processed on m machines, each component requires k processing steps, and the time that each component i spends on each device j when it completes the processing is fixed, assuming the time is
The general PFSP assumes the following specific conditions: 1) n components are processed on m machines by flow line production. 2) All components are in the same sequence during processing. 3) For each equipment, the order of the processed components is also the same. 4) The readiness time and processing time for all components to be consumed on all equipment are known in advance. 5) All equipment can only process one component individually during processing. The purpose of the PFSP solution is to obtain the optimal scheduling plan for a certain production index under the above five specific conditions, that is, to minimize the preparation time and processing time consumed by the entire processing flow.
If the measurement standard of the scheduling is the maximum completion time, this PFSP problem can be described by the three-element method, that is 




Among them, equations (5) to (7) are recursive equations for calculating the completion time, equation (8) is the maximum completion time for the batch of workpieces, and equation (9) is the optimal scheduling scheme for minimizing the maximum makespan, n and m represent the number of components and the number of equipment respectively. The scheduling process is shown in Figure 2.

Scheduling Gantt chart of permutation flow shop
Algorithm coding
The traditional CS algorithm is generally applied to the continuous optimization problem. Due to the discrete characteristics of PFSP, traditional CS algorithm cannot be used directly for the solution of PFSP. In order to solve the PFSP using the proposed CS algorithm to obtain the optimal scheduling allocation scheme for the production process. It is necessary to construct a reasonable coding method to represent the scheduling problem, that is, the sequential composition of shop scheduling. According to the characteristics of PFSP, this paper selects the random key coding method with the ascending sorting principle.
27
The continuous position vector
Scheduling algorithm implementation process
According to the previously established PFSP mathematical model and the proposed coding method, the PFSP implementation process based on the DCS algorithm is as follows:
Step 1: Set parameters and population initialization. Set the population size
Step 2: The cuckoo randomly selects the bird nest location
Step 3: According to the current number of iterations and fitness, use equation (4) to calculate
Step 4: Generate candidate populations
Step 5: Perform a preferred selection operator. For each individual, compare the fitness of the candidate solution with the current solution and save the high fitness solution to the next iteration.
Step 6: Perform a random migration operator. From the updated candidate population in step 4, select individuals with poor fitness to be mutated according to the probability
Step 7: Perform the preferred selection operator again. For individual who performed a mutation, compare the fitness before and after mutation. If the fitness after the mutation is higher, the mutated individual is included in the population, otherwise the individual before the mutation is retained, and skip to step 3.
Step 8: Skip to step 9 when the maximum number of searches is reached, otherwise skip to step 3 for the next round of searches.
Step 9: Outputs the current best solution and the scheduling scheme it represents.
Scheduling simulation experiment and result analysis
The PFSP has a wealth of benchmark data, this article uses eight operators of the Car benchmark instance class: 



Among them,
The parameters of the three comparison algorithms are set as follows: The initial discovery probability of the standard CS algorithm and the ICS algorithm is
Three algorithms experimental data results of car benchmark test.

According to the experimental results in Table 6, in the Car benchmark instance class of the three algorithms, the DCS algorithm can find the best solution every time and the search process is faster than the CS and ICS algorithms, reflecting that the DCS algorithm has good global search performance. According to the two data of ARE and BRE, the quality of the scheduling solution obtained by the DCS algorithm is also higher than the other two algorithms. At the same time, the initial ARE and BRE values of the DCS algorithm are smaller than the CS and ICS algorithms, indicating that the initial robustness of the DCS algorithm is also stronger than the other two algorithms.
Conclusion
In the traditional CS algorithm, the step-size factor of individual movement is usually fixed, which leads to cannot be satisfied with the need of convergence speed and solution precision. In order to solve this problem, a weight-based dynamic adaptive step-size CS algorithm is proposed and applied to PFSP. The advantages of the proposed algorithm are verified by simulation experiment. The following conclusions can be drawn:
The existing improved CS algorithm based on step-size factor usually adopts iteration number ratio or fitness ratio to adjust the step factor separately. In this paper, we introduce the ratio of number ratio and the fitness ratio to achieve the adaptive adjustment of step-size factor, and adjust the weight between them to achieve convergence speed and convergence accuracy balance. The simulation results show that the proposed DCS algorithm has faster convergence speed and higher convergence precision, and has some theoretical value. The proposed DCS algorithm is applied to solve the PFSP by coding by random key encoding of ascending order and using the example class of Car benchmark as the experimental data. The experimental results show that the proposed DCS algorithm has the advantages of higher solution quality, stronger robustness and less precocity compared with the traditional CS algorithm and ICS algorithm. It can be used to solve the PFSP, and it has certain engineering value. In the algorithm simulation tests, the simulation parameters of the three CS algorithms, such as the initial discovery probability, the dynamic balance factor and the parameter skewness value, are selected to test with empirical values. How to optimize these parameters by experiment method or intelligent algorithm optimization method to further improve the performance and expand the application range of the DCS algorithm is our future research.
Footnotes
Authors’ contributions
All authors have contributed equally to this work in terms of data sampling, writing, and reading. All authors read and approved the final manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the National Natural Science Foundation of China (No. 61741303), the Guangxi key laboratory of spatial information and geomatics (Guilin University of Technology) (No.15-140-07-23, No.16-380-25-23).