
Abstract
In Korea, the underwater robot Crabster200 was developed to perform missions such as accident correspondence, artifact exploration, and resource extraction. To explore the shallow sea successfully, it was designed to walk and swim with six legs. Besides, to develop the walking algorithm efficiently, a small model of Crabster200, Little Crabster200, was developed as well. This article describes the development of a walking algorithm on the uneven terrain for the hexapod robot Little Crabster200. The main purpose of the algorithm is for the robot to maintain a horizontal posture while it walks on uneven terrain. The pattern generator makes a trajectory of normal walking on the flat ground, and the online controller helps Little Crabster200 maintain stable walking on uneven terrain. The proposed algorithm was verified by experiments using the Little Crabster200 on a treadmill equipped with obstacles such as wood boards and bricks. The Little Crabster200 walked stably on the uneven terrain while maintaining a horizontal posture in the experiments.
Introduction
Most of the ocean is still unknown to humankind, even though 70% of the earth’s surface is occupied by the ocean. Today, many countries are exploring the ocean for important reasons. The National Oceanic and Atmospheric Administration (NOAA) of United States of America explained that the ocean is a major influence on climate, supports a great diversity of ecosystems, and so on. 1 In addition to these ecological reasons, there are also financial reasons. Searching for natural resources such as terbium, lutetium, and so on in the ocean is becoming a common practice. Furthermore, ancient relics, such as a Goryeo celadon vessel, have been found in the seabed around South Korea. Thus, the ocean can be described a gift that is unopened yet.
For these reasons, many underwater robots have been developed around the world. Most underwater robots use propellers to produce their driving power. These types of robots include remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs).2–4 Driving power from propellers is stronger than other sources of power. Therefore, robots with propellers can explore the ocean with high speed; hence, robots with propellers have been the most commonly used robots for a long time. REMUS 6000 AUVs were used in the search for the Air France Flight 447 5 in 2011, and Bluefin-21 AUV 6 was used to search for the wreckage of the missing Malaysia Airlines Flight 370 in 2014. However, the robots with propellers are vulnerable to disturbances from strong currents. When the Sewol ferry sank with hundreds of high school students in South Korea in 2014, ROVs from the United States (Video ray Pro 4) 7 and Canada (Deep Trekker) 8 tried to rescue them. However, despite the excellent performance of the two ROVs, it was impossible to rescue all of the victims from the Sewol ferry.
However, fish-type robots9–11 have also been developed. Boston Engineering developed a robot fish that was named the GhostSwimmer to be used by the military reconnaissance force. According to an announcement in December 2014, the GhostSwimmer could submerge to a depth of 90 m of water with a low noise level. 12 In addition to military use, the robot fish can be used for investigating water pollution and currents. In South Korea, the Korea Institute of Industrial Technology (KITECH) designed a robot fish called ICHTHUS 13 to check the pollution in rivers. However, strong currents impeded the robot fish just as they did robots with propellers.
To successfully explore the ocean, even in strong currents and turbulent water, a legged robot is useful. Different from the propeller-typed and fish-typed robots, legged robots foot on the seabed and this feature makes them withstand strong currents and turbulent water. The Korea Institute of Ocean Science & Technology (KIOST) proposed and developed Crabster200 (CR200), an underwater robot that mimicked the movement of crabs and lobsters.14,15 CR200 can explore the ocean to a depth of 200 m and walk and swim using its six legs, as shown in the left side of Figure 1. For effective development of walking algorithms, Little Crabster200 (LCR200),16,17 which is smaller model of CR200, was developed as shown in the right side of Figure 1.

CR200 and LCR200.
Walking on the seabed is a crucial task for legged robots because the seabed is unpredictable uneven terrain. There are many researches of hexapod robots for walking on the uneven terrain. Some researches realized the walking on uneven terrain in terms of the hardware design. For example, spider robot ROBOTURK SA-2 has been designed for the aim of defense industry, and the robot has only one actuator. Through its unique design, the robot can walk on the uneven terrain like a spider using only one actuator.18,19 RHex which is developed from Boston Dynamics has six arc-shaped legs. 20 RHex can overcome the uneven terrain by rotating each leg sequentially. Even though this method is simple and very effective, it could cause that the environment is messed up when the robot traverses on the uneven terrain because of nondeterministic motion. Therefore, it is difficult to use this types of hexapod when the sophisticated motion is required. Some researches adapts central pattern generator (CPG) to realize locomotion on the uneven terrain. Inagaki et al. 21 developed gait generation and walking speed control for multi-legged robot using CPG model, and Dennis et al. 22 developed biologically inspired reactive climbing behavior based on the CPG. Even though the CPG is a popular way to realize the uneven terrain locomotion, it is not proper for precise motion of the robot. Hence, our goal is to develop a walking algorithm on the uneven terrain with not only high tracking performance to guarantee precise motion but also maintaining the level of the robot.
This article proposes an algorithm for walking on the uneven terrain so that a robot can walk on an uneven seabed. While walking on uneven terrain, the LCR200 can meet two challenges: first is “early landing” when it steps onto elevated ground, and the second is “late landing” when it steps down to lower ground. For the robot to detect these situations, we used ground reaction forces from the robot legs. After checking the status of the ground, a balancing controller adjusts the walking trajectory for each case. Therefore, the LCR200 can walk on the uneven terrain while maintaining a stable posture.
This article is organized as follows. Section “Overview of LCR200” gives an overview of LCR200 along with its mechanical properties, such as the length of frames and the weight of parts, the communication system, the control architecture, and the kinematic relationship. In section “The pattern generator and balancing controller,” the pattern generator and balancing controller for walking on the flat and uneven terrains are explained. In section “Experiment,” the controllers are verified by experiments. Finally, section “Conclusion” concludes the article.
Overview of LCR200
As mentioned earlier, LCR200 is a platform to effectively develop the walking algorithm. In this section, the hardware characteristics, parts of joints, and communication system of the LCR200 are covered.
The LCR200 has three legs on the right side and three legs on the left side. Each leg includes four degrees of freedom (DOFs): hip yaw, hip roll, hip pitch, and knee roll joints. At the tip of each leg, a load cell is equipped to measure ground reaction force. In the CR200, the two front legs are equipped with two grippers. The grippers are used to accomplish missions such as excavating ruins under the sea. LCR200 also has two grippers. Each gripper has three DOFs. When the LCR200 uses grippers, four legs (two middle and two rear legs) are used to walk on the ground. However, in this study, since walking of the hexapod is our interest, the grippers aren’t used.
The size and weight of LCR200 are significantly less than them of CR200. The weight of CR200 is more than 400 kg, and the area of the base is more than 2 m2. In the contrast, the weight and area of the base of LCR200 are less than 60 kg and 1 m2. LCR200 is a very suitable platform for walking algorithm research in a laboratory. Table 1 shows the DOFs and dimensions of LCR200, and Figure 2 shows the detail of DOFs of a leg and gripper.
Degrees of freedom and dimensions of LCR200.
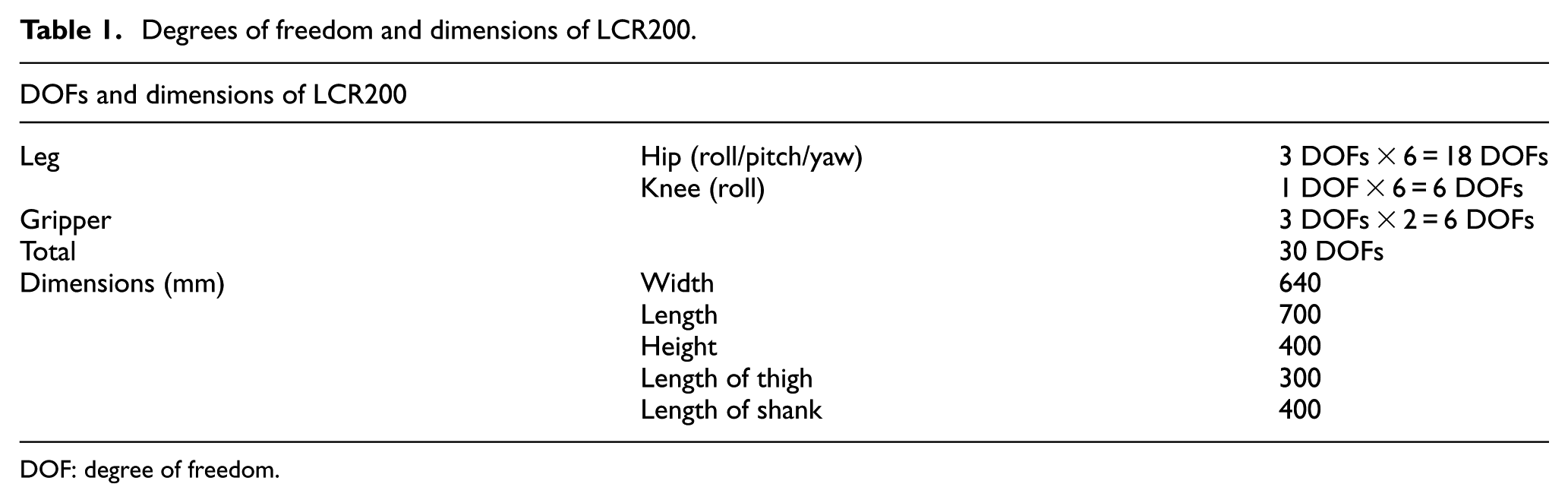
DOF: degree of freedom.

DOFs of the leg (four for legs and three for grippers) and the load cell.
Each joint of LCR200 is driven by a Maxon brushless DC (BLDC) motor. The motor controller developed by Robocube Tech controls position of the motor with 1 kHz frequency. And, a main controller located in the body of LCR200 controls all motor controllers and gets sensor data every 10 ms by controller area network (CAN) communication. Figure 3 shows the communication structure of LCR200.

Communication system of the LCR200.
In addition, harmonic gears from harmonic drive and pulleys are used to amplify torques of the BLDC motors. The necessary torques of the hip roll and knee roll joints are larger than the hip yaw and hip pitch joints, so the reduction ratios of the hip roll and knee roll joints are larger than them of the other two joints. Table 2 shows the reduction ratios for each joint.
Reduction ratios for the leg joints.

The pattern generator and balancing controller
Walking overview
When LCR200 walks, it is set to keep two conditions. First, the body posture of LCR200 must be horizontal to the flat land during walking because the horizontal posture is intuitive and easy to make. In this study, our experimental environment was composed of a horizontal treadmill and various obstacles. Therefore, keeping the horizontal posture was enough to walk stably. However, a desired body posture can be simply changed according to the situation. Second, LCR200 lifts only one leg at a time. We defined this work as a swing phase of a swing leg. At the same time, the other legs support the body. When the swing leg finishes a swing phase, it is on the ground and supports the body. We defined this work as a supporting phase of the leg. Hence, the motion of each leg is composed of the motions of swing and support phases.
When we designed the sequence of the swing phase of LCR200, we were inspired by walking of animals. The research of Muybridge describes the walking sequences of animals, such as a horse’s zigzag operation, which is a series of left anterior leg, right posterior leg, right anterior leg, and left posterior leg. 23 The walking sequence is not limited to horses. It was confirmed that the walking sequences of crabs, the mother of LCR200, and other crustaceans such as scorpion, were zigzag. Like that of multi-legged animals, the walking sequence of LCR200 was developed as shown in Figure 4. When LCR200 begins walking, it swings a right front leg first. After its swing motion, LCR200 swings other legs in order as follows: left middle leg, right rear leg, left front leg, right middle leg, and left rear leg. After this walking cycle, LCR200 starts the next walking cycle.

The swing phases of legs.
To make LCR200 walk on uneven terrain, we generated desired trajectories of all legs. Figure 5 is the top view of the robot and shows the positions of each leg in the Cartesian coordinates. The

Positions of each leg in the top view.
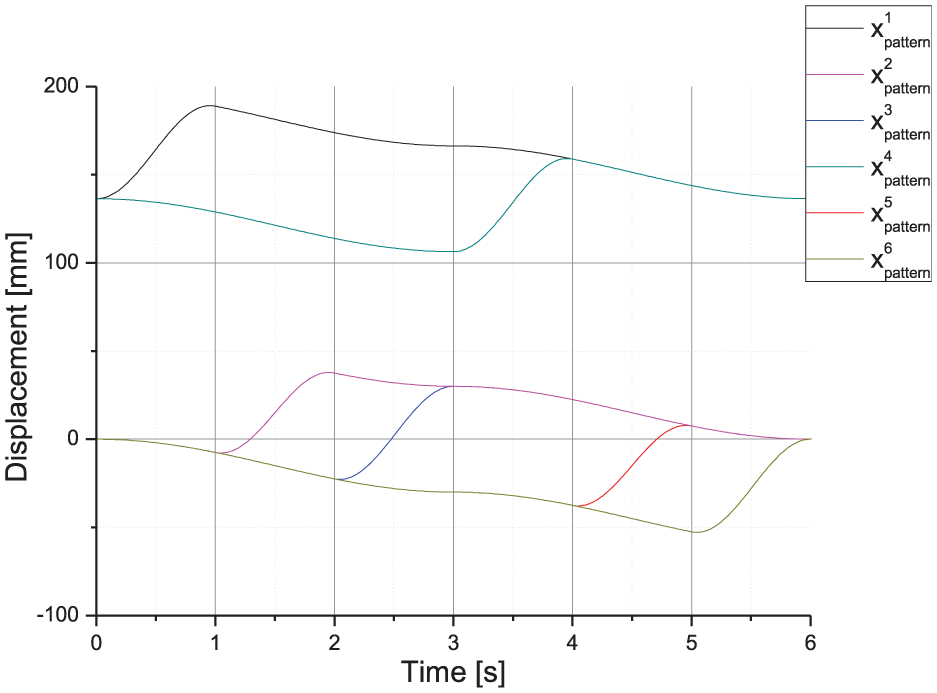
To generate the desired trajectories of all legs, we developed the pattern generator and the balancing controller. Figure 6 shows a block diagram of the control algorithm with the pattern generator and balancing controller. The pattern generator generates the desired trajectories



When the pattern generator receives a step length and a step height of a swing leg, it generates



The balancing controller was developed for walking on uneven terrain. It is divided into an early landing controller, late landing controller, and height compensator. When LCR200 steps on an obstacle, the early landing controller generates



In this study, the side step and turning motions of LCR200 were not our interest yet. Hence, we only discuss

The block diagram of a walking algorithm.
Pattern generator
The initial terms
The initial terms represent the walking ready posture of LCR200; the initial terms are constant values. In this study, we set the front side of the right leg at a 45° and the left leg at a 135° angle to the y-axis. The other legs were set parallel to the y-axis. Hence,
The swing terms
The swing terms make the swing motions of each leg. As mentioned before, a walking cycle consisted of six swing motions. To express the motions of each leg, defining a period of every swing motion was important. To define the period, characters
The swing terms of each leg are shown in equations (10)–(14). To assort the legs in the swing phase and supporting phase, the superscripts





where

The

The
The COM terms
The COM terms make the body move to the walking direction. To move in the walking direction, the directions of the COM terms and swing terms are opposite. To move without turning motions, the COM terms of each leg are the same in every swing period. In every walking cycle



where

The
The
The

The
The balancing controller
The goal of this section is to develop a balancing algorithm that maintains the horizontal posture of LCR200 while it walks on uneven terrain. To keep LCR200 walking stably when it is faced with early landing and late landing, we designed a balancing controller. As shown in Figure 6, the balancing controller is composed of the early landing controller, late landing controller, and height compensator. The early landing controller and late landing controller compensate for the trajectories for early landing and late landing. The height compensator modifies the trajectories to establish the constant height of each leg.
Early landing controller
Detection of the early landing
To check the early landing, using only the pattern generator, we observed the behavior of LCR200 when it walked on flat land. The z-directional trajectory and ground reactive force of the swing leg are shown in Figure 12. The walking cycles

Desired trajectory on the z-axis and the ground reactive force of the swing leg.
Theoretically, the ground reactive force
Therefore, it is possible to detect the time of early landing at the rth swing phase and the nth walking. Since this walking phase must begin at
The early landing controller
When the early landing is detected at




Figure 13 shows the x-directional trajectory of the swing leg with a black line when LCR200 detects the early landing at 6.8 s. For comparison, the trajectory from the pattern generator is plotted with a red dotted line. Figure 14 shows the supporting legs followed the swing motion from 6.8 s. At 7 s, the right front leg finished the swing motion and the left middle leg started the swing motion.

The x-directional trajectory of the swing leg,

The z-directional trajectories of the swing leg and supporting legs.
Due to the early landing controller, the trajectory on the x-axis was shorter than the trajectory from the pattern generator. Hence, the x-directional trajectory of the swing leg needed to be compensated for. To compensate for the trajectory on the x-axis in the nth walking cycle and the rth swing phase, the early landing controller produces an extra trajectory in the (n + 1)th walking cycle and the rth swing phase. This cycle is defined as

where
The
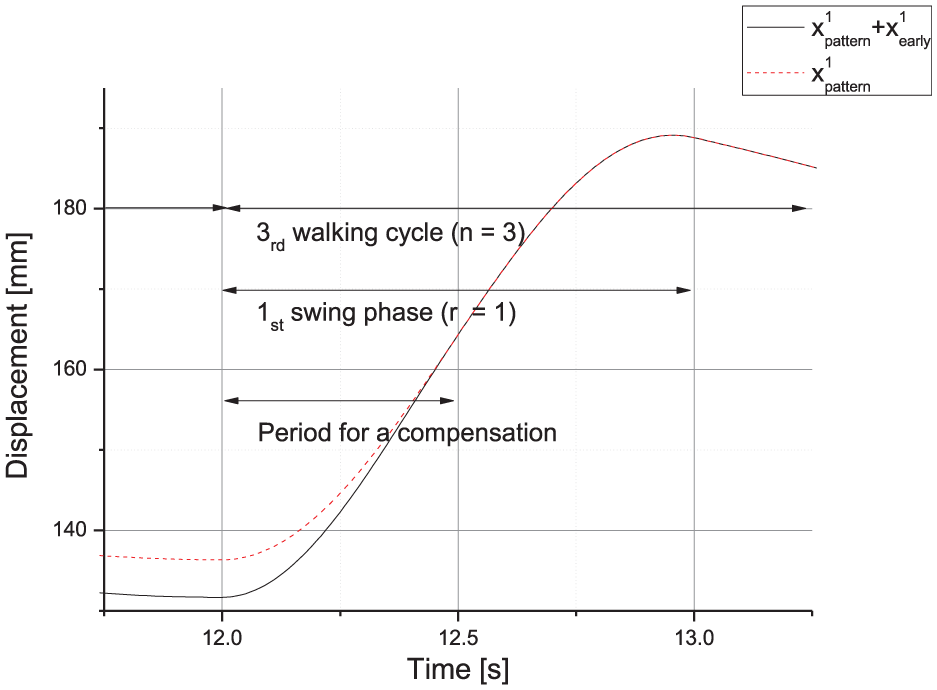
Compensated x-axis trajectory by the early landing controller.
Late landing controller
When LCR200 loses its step, it needs to set down its swing leg until it steps on the ground. To step on the ground, the late landing controller produces extra z-directional motions of the swing leg. During the late landing phase, the pattern generator does not generate any trajectories so that LCR200 does not move the supporting legs until the swing leg steps on the ground. The trajectory from the late landing controller is shown in equations (23) and (24). In the late landing


where


Modified z-axis trajectory by the late landing controller.
The height compensator
When LCR200 walks, it is possible that LCR200 walks on the uneven terrain while maintaining a horizontal posture using the early landing controller and the late landing controller. However, two controllers may cause a situation in which all legs are lengthened on the z-directional while walking. This phenomenon could increase the instability of the posture more and more. To maintain the height level of the LCR200 constantly, the height compensator works only if the all legs are longer than


where

Compensated trajectories on the z-axis by the height compensator.
Experiment
To verify the proposed controllers, experimental environment was setup. The uneven terrain was composed of a treadmill and rigid obstacles, such as wood blocks and bricks. The heights of the obstacles were lower than the step height. Figure 18 shows a series of experimental pictures in which LCR200 walked on the treadmill having the obstacles. In the experiment, the swing period

Walking of LCR200 on the uneven terrain.
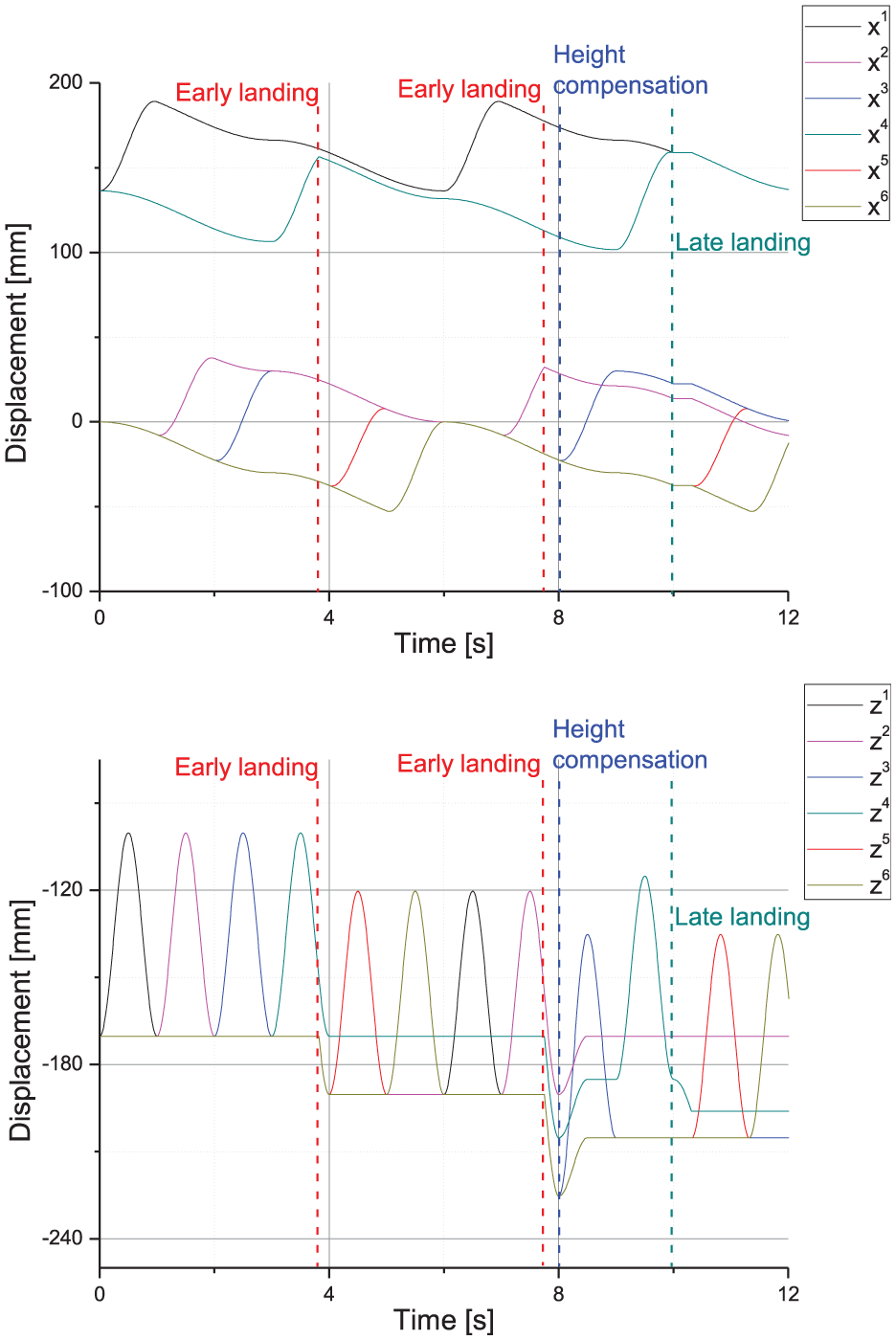
The x-directional and z-directional trajectories of LCR200 when it walks on the uneven terrain.
In the experiment, LCR200 maintained the horizontal posture while walking. Figure 20 shows that the body pitch angle of LCR200 maintained around 0° while it walked on the uneven terrain. The variance of angle was within a degree. Through the experiment, it is verified that LCR200 could walk on the uneven terrain with maintaining the horizontal posture of the body with the proposed algorithm.
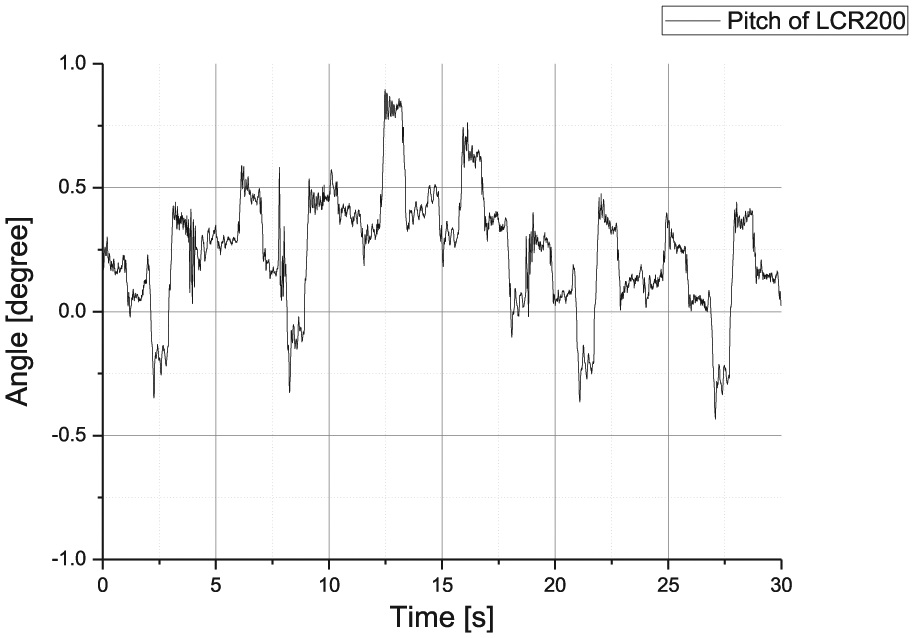
Body pitch angle of LCR200 when it walks on the uneven terrain.
Conclusion
In this article, we described the pattern generator and balancing controller of LCR200 for walking on uneven terrain. We first designed the pattern generator for a basic walking pattern. The pattern generator made the LCR200 walk on the flat ground. However, the pattern generator was not sufficient to walk on uneven terrain. To walk on uneven terrain, a balancing controller was required. The proposed balancing controller consisted of the early landing controller, late landing controller, and height compensator. To activate the controllers, detecting the early landing and late landing of the swing leg was necessary. To detect the early landing and late landing, we introduced the ground reaction force of the swing leg using load cells and the length of the period of the swing motion. Through the experiment, it was verified that LCR200 walked well on the uneven terrain while maintaining horizontal and stable posture with the proposed method.
As future work, the proposed walking algorithm will be applied to the side step and turning motions. Moreover, additional controllers will be added for compliance and reducing overloads on the joints. To guarantee more advanced tracking and compliance performances, more advanced control algorithms will be adapted such as an adaptive control.24,25
Footnotes
Handling Editor: Jose Ramon Serrano
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Korea Research Institute of Ships & Ocean Engineering for the development of a multi-legged walking & flying subsea robot.
Supplementary material
Supplementary material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.