
Abstract
Horizontal well production technology is an increasingly important method to improve oil recovery. However, with the intensification of oil production, the problem of high water content in horizontal wells becomes more serious and causes oil recovery to rapidly reduce. The technique of water searching with a crawler can ensure that water searching and well production works are conducted simultaneously. The application of this technique achieves good economic and environmental outcomes. But in order to ensure the water searching system within the crawler is safe and reliable, mathematical models of the ground cable tension and the head tension of the crawler need to be established. These models are calculated and appraised on the basis of the engineering case, and it is gained that theoretical calculation results are in agreement with test results. Furthermore, the free fall limit depth of the crawler obtained by our theoretical calculation is in agreement with the test result. The study results show that the mathematical models can accurately predict ground cable tension and head tension of the crawler and are important to reduce the risks of the well logging as well as improve the success rate of water locating.
Introduction
Horizontal well production is an increasingly important technology to improve the efficiency of oil production and it has achieved outstanding economic benefits. However, as the increase in oil production intensifies, the water content in the horizontal wells is also rapidly rising, causing the efficiency of oil exploitation to diminish. A method known as water searching and plugging is effective in controlling the water content in horizontal wells, and the exact location of the water exit point is key for the water searching and plugging operation. The technology using a crawler transport the logging tool to target logging section is the water searching technology with a crawler. Compared with conventional carrying technology, the crawler carrying technology is not limited to land and marine environments; has a short working time, high efficiency, and low cost; and greatly improves the quality and reliability of logging. Therefore, this technology has received much attention in the oilfields and is also widely used to estimate the security of tubing inspection engineering, reservoir parameter evaluations, and workover projects.1,2 Notably, the technology plays an important role in improving the economic benefits of those projects.
During the falling process of the crawler, the cable will snap when the ground cable tension and the head tension of the crawler are greater than the breaking force of the cable head. The crawler may be stationary in the well or reach a free down limit depth when the head tension of the crawler disappears during the falling process. The well will be plugged by the cable if it continues to fall or if the start time of the crawler is inaccurate. The falling process of the crawler is a complex mechanical problem. If the cable tension is unreasonably controlled or the start time of the crawler is inaccurate, it can cause huge economic losses. So, before the construction of the water searching infrastructure, the ground cable tension and the head tension of the crawler should be calculated on the basis of a technology designed construction scheme, which is important for evaluating the safety of the crawler falling operation.
Most of the previous studies have focused on the tractive force of the crawler but not on the ground cable tension and head tension of the crawler. 3 But the accurate predictions of the ground cable tension and the head tension of the crawler are keys to reduce falling operation accidents. Therefore, on the basis of the controllable parameters of the designed construction scheme, the calculation models of the ground cable tension and the head tension are established by mechanical analysis of the crawler and cable during the falling process in the well. Then, we compare our calculations with those of previous theoretical calculation results to evaluate whether they are in agreement. The mathematical models can accurately predict the ground cable tension and the head tension of the crawler at any position of the well trajectory. This study provides theoretical support for controlling the ground cable tension and the cable head of the crawler tension during the water seeking operation.
Theoretical model
Working principle
Figure 1 is a schematic diagram of the water searching with a crawler and can be divided into two steps: falling process of the crawler and pulling back the started logging equipment with the cable. The falling process of the crawler is a complex mechanism and is the main focus in water searching engineering. In order to keep the falling velocity of the logging equipment unchanged, the falling velocity of the cable is controlled by a ground control box. At this point, under the influence of the ground cable tension, the gravity of the cable and the crawler, the liquid pressure, buoyancy, viscous force, and the friction force, there is equilibrium in the water searching system with the crawler. The logging equipment reaches a free down limit depth when the crawler cable head tension suddenly disappears. When the crawler starts, the logging device is pulled to the target position by the crawler after the cable is lifted in a tensioned state. Finally, the logging equipment is pulled back and continuous logging after the crawler is shut off. In order to successfully complete the logging task, the cable head tensions must be within a safe range by controlling the lifting velocity of the winch.

Schematic diagram of the water searching with the crawler.
Construction parameters
In order to predict variations in the ground cable tension and head tension of the crawler with well depth, mechanics analysis of the crawler and cable is conducted during the falling process of the crawler. Then, theoretical calculation models of the ground cable tension and head tension of the crawler are established on the basis of the designed construction plan. By substituting the technical parameters of the designed construction plan into theoretical calculation models and solutions, the calculation results of the ground cable tension and the head tension of the crawler can be determined. If the calculation results are greater than the maximum pull resistance of the cable head, it means that the designed construction plan is unreasonable; otherwise, it is reasonable.
The technical parameters of the designed construction plan must be determined before applying the theoretical calculation models. The key technical parameters that affect the ground cable tension and the crawler head tension are as follows:
The parameters of the designed well track: the inclination angle of well, well depth, dogleg angle, and bending radius.
Well pressure, fluid velocity, fluid density, and fluid viscosity under normal operation of the well.
The parameters of the crawler and logging tool: length, diameter, weight, and maximum drawing force.
The parameters of the cable: outside diameter, linear density, and anti-fracture strength.
In order to protect the cable, the anti-fracture strength of the cable head is set to a half of the anti-fracture strength of the cable. If the cable tension exceeds the anti-fracture strength of the cable head, the cable breaks at the cable head.
Mechanical analysis
According to the work principle, the falling process of the crawler can be divided into four working conditions:4–6
The crawler does not start and falls at a uniform speed in the straight inclined segment of the design trajectory.
The crawler does not start and falls at a uniform speed in the bent section of the design trajectory.
The crawler starts and falls at a uniform speed in the bent section of the design trajectory.
The crawler starts and falls at a uniform speed in the straight inclined segment of the design trajectory.
Based on the actual construction condition, the principle hypothesizes as follows:7–11
The falling velocity of the crawler is constant.
The cable has an ideal flexible body, which cannot be elongated along the axial direction.
The contact between the cable and the wellbore is continuous.
The contact state between the cable and the wellbore is shown in Figure 2 which shows that

The contact state between the cable and the wellbore.
The cable of the inclined straight section mechanics analysis



Mechanical analysis of the cable infinitesimal section in the straight inclined section.
The net weight of the infinitesimal section, the viscous force, and the friction force can be calculated by the following expressions
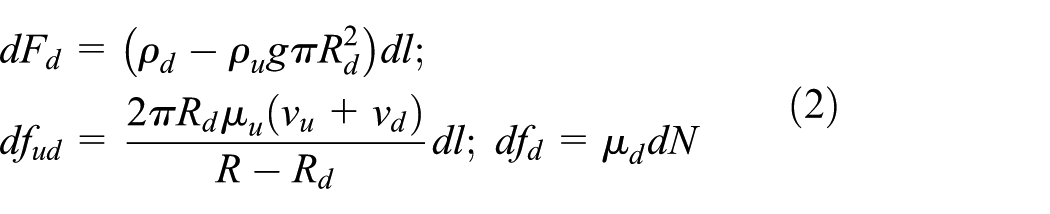
where

Then, let


The following results can be determined on the basis of expression (5):
The relationship of the pull forces of the cable ends on straight inclined section 1

The relationship of the pull forces of the cable ends on straight inclined section 2

Mechanical analysis of the cable on the bending section
The mechanical analysis of the infinitesimal cable in the bent section is shown in Figure 4 where



Mechanical analysis of the cable infinitesimal section within the bent section.
According to the differential theorem, as

The net weight of the infinitesimal section and the viscous force can be calculated by the following expressions

Because

Expression (10) is built on the basis of expressions (7) and (9) where the high-order infinitesimal

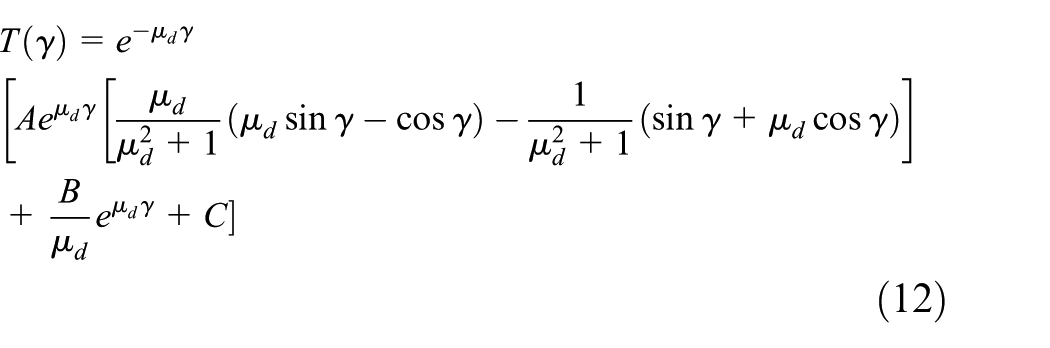
Let

By solving expression (11), expression (12) can be calculated
where

When

The cable tension can be determined by entering expression (14) into expression (13) as follows

According to the geometric relation, it is known that

When expression (16) is plugged into expression (15), expression (17) can be deduced

Then, let

When
Mechanics analysis of the crawler in the bent section
Depending on the actual situation, the falling condition of the crawler in the bent section includes two cases. In the first case, the tractive force



Mechanics analysis of the crawler in the bent section.
Meanwhile, the following equations are also determined

According to the above equations, the expression of the cable head tension of the crawler can be determined

In addition, according to the geometrical relation, the equation
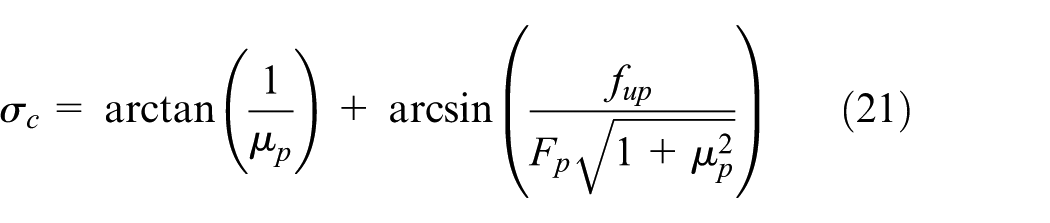
Let

When the crawler reaches the free falling limit length, the cable head tension and the tractive force equal 0. The angle of the free falling limit length can be gained by solving equation (20)
When the crawler has not started, the equation of the cable head tension at the point

When the crawler has started, the equation of the cable head tension at the point

Mechanics analysis of the tractor on the inclined straight section
According to the mechanics analysis of the crawler in Figure 6, the mechanical equilibrium equations are established as follows



Mechanics analysis of the crawler in the straight inclined section.
Expression (25) is gained by plugging equation (24b) into (24a)

Let

So the cable head tension of the crawler
The mathematical models of the ground cable tension and the tractor cable head tension
In summary, the coefficients and the intermediate functions in the mathematical models of the ground cable tension and the crawler cable head tension are as follows

The mathematical model of the crawler cable head tension
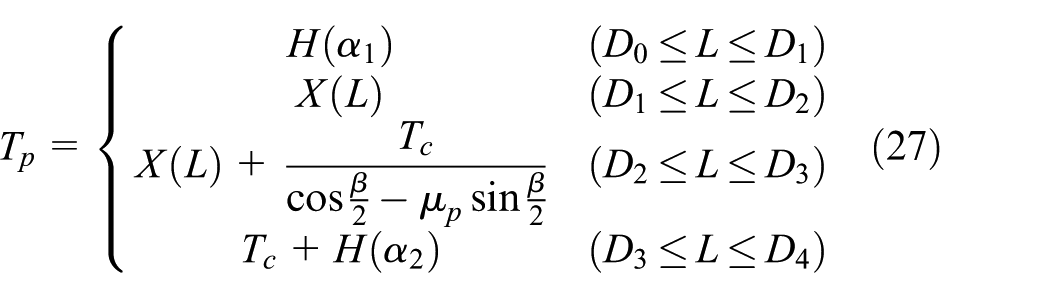
The mathematical model of the ground cable tension

Case analysis
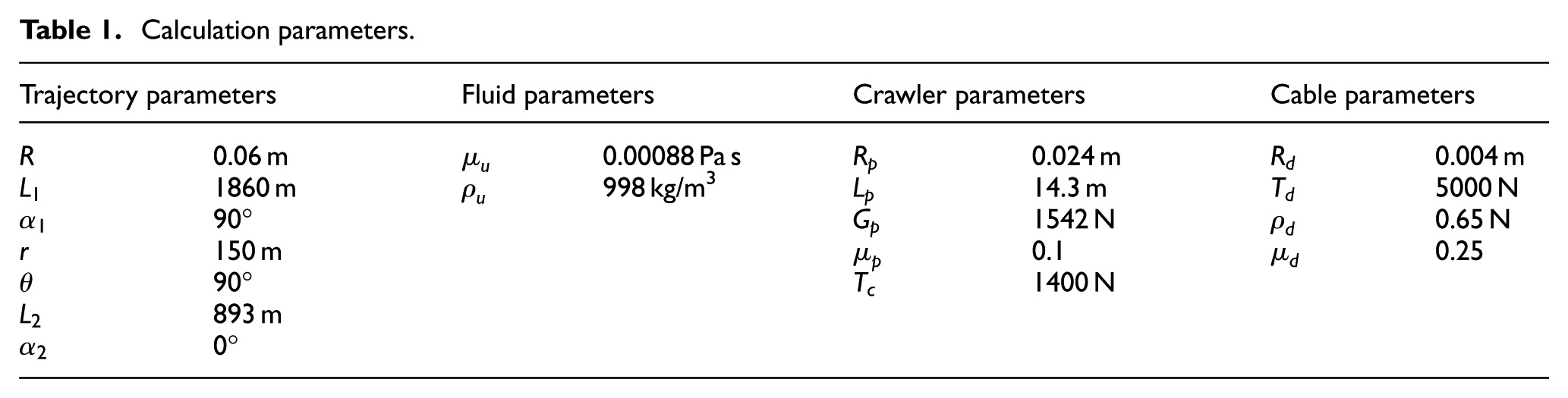
In this article, the mathematical model is verified by the test well. The design trajectory parameters, the crawler parameters, the cable parameters, and the fluid parameters are listed in Table 1. The falling velocity is 0.2 m/s when the crawler is in the straight inclined section 1, and the falling velocity is 0.1 m/s when the crawler is in the other sections. The fluid velocity is 2.32 m/s. Based on the data in Table 1, the calculation results are gained by expressions (27) and (28).
Calculation parameters.
In order to eliminate the random error, the experiment is repeated three times under the same conditions. The 47 data points were collected each experiment, and then the 38 data points were retained after the unreasonable data points were eliminated. Three sets of the tests results are shown in Figure 7.

Test results of ground cable tension.
The data in Figure 8 show the average of the three sets of experimental data, and the error bar is the standard deviation of the three sets. The black error bar represents the data measurement error of the ground cable tension. The red error bar represents the measurement error of well depth. As can be seen from the diagram, the measurement error of the well depth is low and can basically be ignored. The measurement error of the ground cable tension is relatively low because the crawler moves steadily in the vertical section. The contact between the crawler and the wellbore becomes complicated and the measurement error of the well depth increases, which causes the measurement error of the ground cable tension to increase during the phase when the crawler passes through the curved section. The system moves steadily when the crawler enters the horizontal section. Because the horizontal wellbore environment is more complex than the vertical section, the error of the measurement data of the horizontal section is slightly higher than the vertical segment. In Figure 8, the theoretical calculation results are in agreement with the test results, and the error of the calculation result is less than 7.3%. Meanwhile, from Figure 9, the calculation result of the free fall limit depth is 2082.4 m, which is very close to the test result of 2078.1 m. The results show that the prediction results of the theoretical calculation model are credible. So the ground cable tension and the head tension of the crawler can be calculated accurately by the mathematical models, which is important for evaluating safety of the crawler falling operations.

The relationship between the cable tension and the well depth.
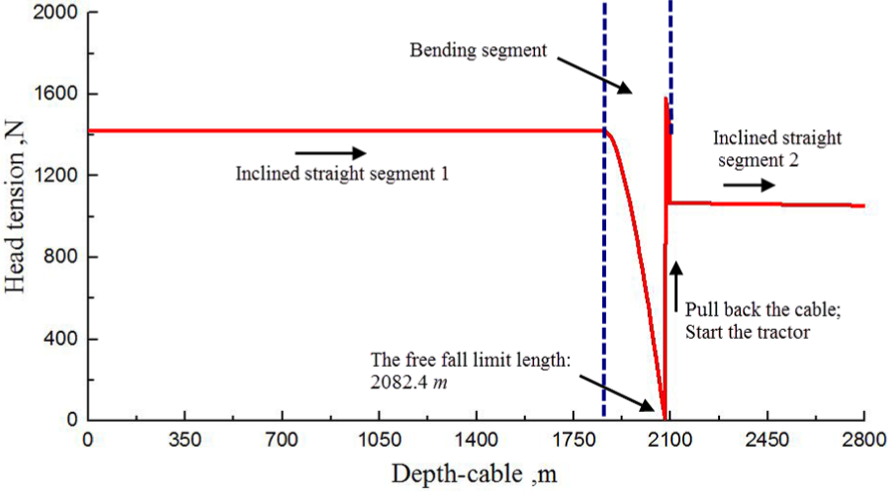
The relationship between the cable head tension of the tractor and the well depth.
Conclusion
The mathematical models of the ground cable tension and the crawler cable head tension are established by mechanics analysis. By comparing the test data and the theoretical calculation results of the cable tension, the calculation error is less than 7.3%, and the free fall limit depth of the calculation result is in agreement with the results of the experiment. These results indicate that the theoretical calculation model is valid and can be effectively used for predicting the ground cable tension during the falling process of the crawler.
Footnotes
Handling Editor: Xiaotun Qiu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.