
Abstract
This article presents sliding mode–based robust tracking control for a redundant wheeled drive system, which is designed for energy saving and fail safe motion. Wheeled mobile robots are widely used in different applications such as a wheelchair and an automated guided vehicle because of their loading capability, low mechanical complexity, and simple engineering design. In addition, using wheeled mobile robots is an effective way to enhance the quality of life for elderly and disabled people to promote their independence and to extend their activities. Wheeled mobile robots are generally operated using embedded batteries, which determine the operating time. Therefore, saving energy motion is a significant requirement to extend the operation time. The dynamics of a redundant wheeled drive system is described. Distribution control and sliding mode control for wheeled mobile robots are proposed, and its stability is guaranteed based on the Lyapunov stability theory. Finally, the robustness and effectiveness of the proposed method are demonstrated experimentally, providing superior results to conventional state feedback control and robust tracking in the real environment with less energy.
Keywords
Introduction
Wheeled mobile robots (WMRs) can be used in many different fields; civil and military applications such as search and exploration, guidance, rescue, hazard detection, surveillance and transportation tasks.1,2 Recently, many control strategies have been considered to research the tracking control problem of WMRs.3–10 Xin et al. 4 proposed robust adaptive tracking control of WMRs. Chen et al. 6 proposed adaptive tracking control for a class of nonlinear stochastic system. Yang et al. 8 proposed a robust tracking control based on extended state observer. An adaptive tracking controller for a nonholonomic mobile robot with unknown parameters has been proposed. 10 Many control schemes are potentially useful for tracking control of WMRs such as dynamic surface control and disturbance observer based on fuzzy control.11–14 However, the effectiveness of all controllers is shown only by simulation and the energy saving is not analyzed theoretically nor experimentally.
As a robust control approach, the sliding mode control (SMC) of WMRs is recently receiving increasing attention. The advantages of using SMC are fast response, good transient and robustness against system uncertainty and external disturbance.15–21 Jorge et al. 15 proposed SMC that exploits a property named differential flatness of the kinematics of nonholonomic systems. Shim et al. 16 proposed SMC in which unicycle-like robots converge to a reference trajectory with bounded errors of position and velocity. Aguilar et al. 17 used a path-following feedback controller with sliding mode which is robust to localization and curvature estimation errors for a car-like robot. Other control approaches such as adaptive control based on neural network for WMRs are proposed in recent years.3,22,23 However, energy saving is not considered in those control strategies.
Furthermore, WMRs are widely used in ports, agriculture, and other different engineering fields because of their loading capability, relative low mechanical complexity, and simple engineering design. In addition, using WMRs is an effective way to enhance the quality of life for elderly and disabled people to promote their independence and extend their activities.24,25 In fact, energy consumption is considered as one of the important problems currently faced in the field of robotics, in particular, WMRs. In the last few decades, many scientific researches have been conducted for energy saving in mobile robots.26–32 There exist hardware approaches by reducing weights of components and changing actuators, improving the efficiency of motor power supply. Robust and optimal energy control has become prevailing approaches that are implemented in robot drivers to save consumed energy. 30 Ueno et al. 31 proposed a differential drive steer system with energy saving for an omni-directional mobile robot. However, improvement of energy consumption is not analyzed theoretically nor experimentally. Mohamed et al. 33 established a new wheeled device with a redundant drive system to continue its motion safely even when one of motors breaks down for some reasons. However, robustness of the control system for the practical use is not considered.
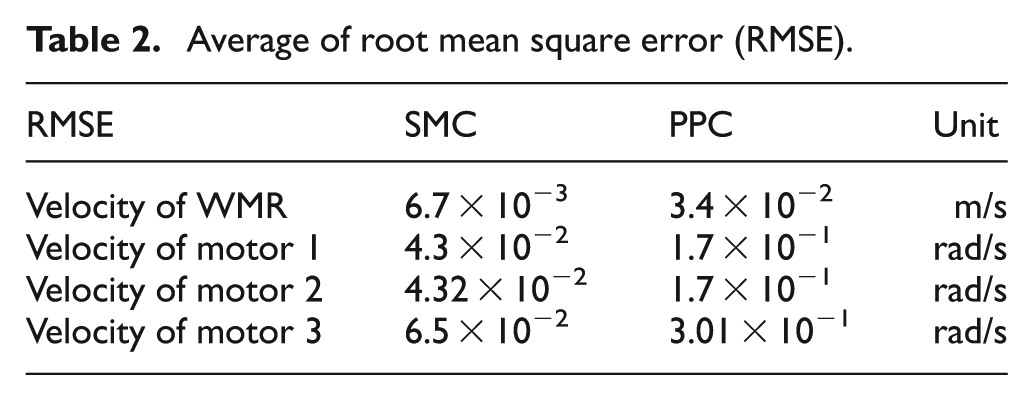
The main contribution of this study is therefore to enhance tracking performance and conservation of energy in motor drivers of the WMRs using SMC with suitable sliding surfaces. In addition, the proposed design of WMR provides secure motion for disabled and aged people who use wheeled mobility to support their self-movement. According to the distribution controller presented in our previous article, comparative study with pole placement control (PPC) was conducted. Computer simulations are performed to verify the effectiveness of the proposed method, and there is no significant difference between the SMC and PPC approaches. In experiments, SMC provides a viable and effective method with strong robustness better than PPC. Experimental results show that the SMC approach improves the robustness performance of tracking in the real environment with less energy than PPC.
This article is organized as follows. Section “Modeling of redundant drive system” presents dynamics system structure. Distribution controller and application of SMC are included in section “Controller design and stability analysis.” Section “Simulation results” presents the simulation results. Section “Experiments” presents the experimental results. Section “Energy evaluation” presents the energy consumption. Section “Conclusion” provides concluding remarks and future work.
Modeling of redundant drive system
Dynamics system structure
This article considers a redundant wheeled drive system shown in Figures 1 and 2. 34 The system has two drive wheels with three motors and two planetary gears, which have high transmission efficiency and durability for high power. As shown in Figure 1, motors 1 and 2 are connected to right and left wheels through each planetary gear. Motor 3 is connected to both right and left planetary gears, and it supplies power for both wheels. Planetary gears consist of a planetary carrier and an outer gear that revolve around a sun gear. The sun gear connects to motor 3, the outer gear connects to motors 1 and 2, and the planetary carrier connects to each wheel. In this study, we do not consider any actuator constraint.

Redundant wheeled drive system.

Experimental device (rear side).
Dynamics model
Motion of the WMR is schematically shown in Figure 3. The proposed model includes a planetary gear property. A WMR is a plate body which has two identical driving rear wheels that are controlled by three independent actuators and two caster front wheels that are used for motion stability. In this study, it is assumed that the slipping of wheels can be ignored. The dynamics of the mobile robot is given by


where

Two-wheeled mobile robot.
The relationship between the linear velocity of the WMR

where

where M is the 3 × 3 inertia matrix, C is the 3 × 3 viscous friction matrix, and G is the 3 × 3 control input matrix, as follows


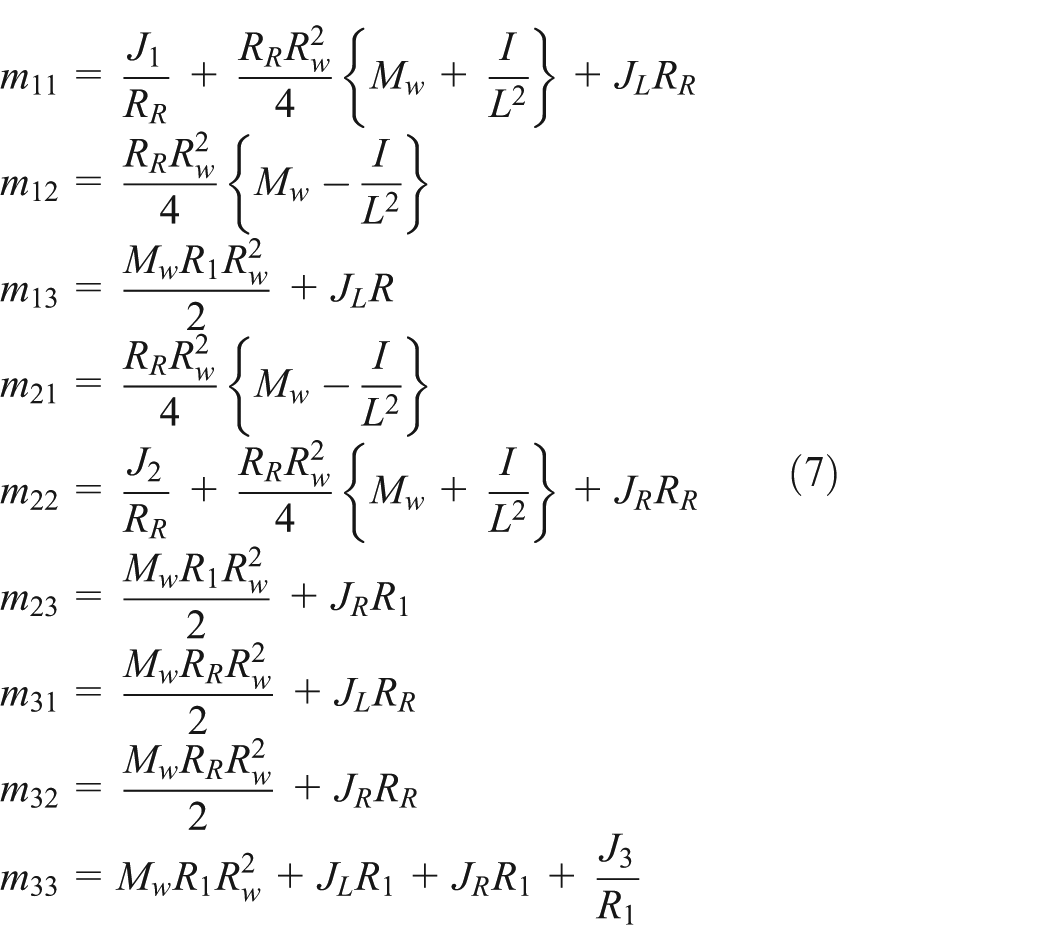



where
Controller design and stability analysis
Distribution controller
In this study, we assume a WMR like personal mobility such as an electrical wheelchair. The reference translational speed

By substituting equation (3) into equation (11), we obtain angular velocity

From Mohamed et al.,
34
we have the equation of motion of the angular velocities

When
Application of SMC
The tracking control problem can be achieved by keeping the system trajectory on the sliding surface. The sliding surface for the ith motor is chosen as follows 35


where
Substituting equation (15) into equation (14) leads to

where

where K = diag{k1,…,k3} and

The sign(.) in equation (17) is a switching function which causes discontinuity in control signal and produces chattering that should be avoided practically. This chattering can be eliminated by smoothing the control discontinuity in a thin boundary layer, neighboring the sliding surface. 35 The sign(.) function is replaced by saturation function, sat(.) as follows

where
In order to prove the stability of the proposed system, we consider the Lyapunov function candidate as follows

Differentiating equation (20) with respect to time

By applying equations (4) and (16) to equation (21), we have

Considering the control law in equation (17), we have

which guarantees the stability.
Simulation results
To verify the effectiveness, the proposed controller is compared with a typical PPC by computer simulation. This study considers only smooth trajectories. We used an S-shaped velocity profile as a reference translation velocity of the WMR. 34 Parameters of the experimental system are as follows: Mw = 46.0 kg, I = 0.625 kg m2, Rw = 0.165 m, L =0.275 m, J1 = J2 = 0.149 × 10−1kg m2, J3 = 0.181 ×10−2 kg m2, JL = JR = 0.034 kg m2,C1 = C2 =0.268 ×10−1 N m s/rad, C3 = 0.102 × 10−1 N m s/rad, CL =0.713 ×10−2 N m s/rad, CR = 0.584 ×10−2 N m s/rad, d = 3, and R = 3.
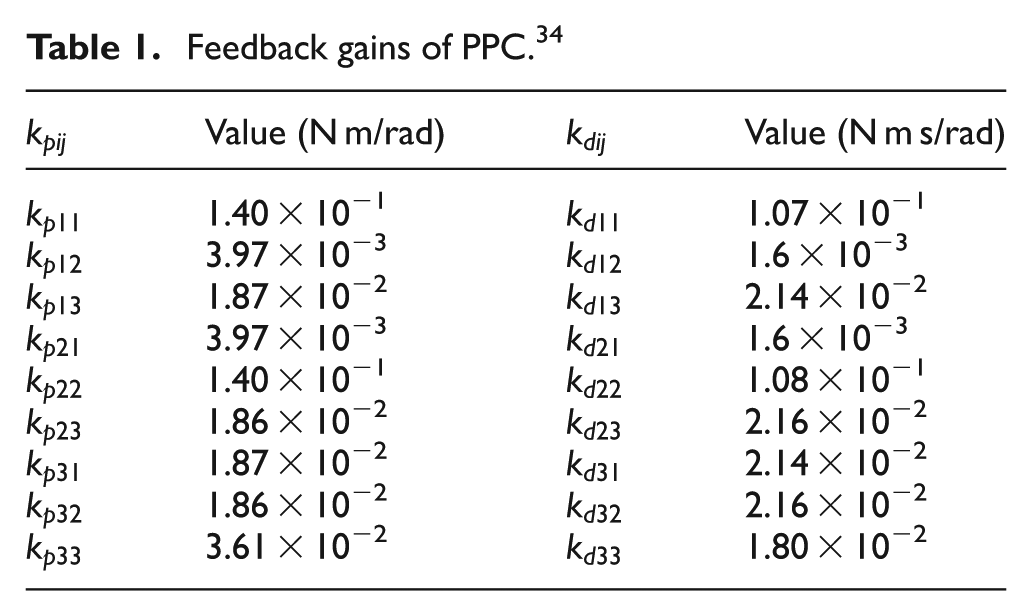
The feedback gains of PPC used in the simulation are shown in Table 1,
34
which are obtained by poles at −2, −2, −3 [1/s]. The SMC parameters are tuned to achieve the best results and are obtained as follows (units are omitted): K = diag{0.05, 0.05, 0.05}, λ = diag{12, 12, 12}, and
Feedback gains of PPC. 34

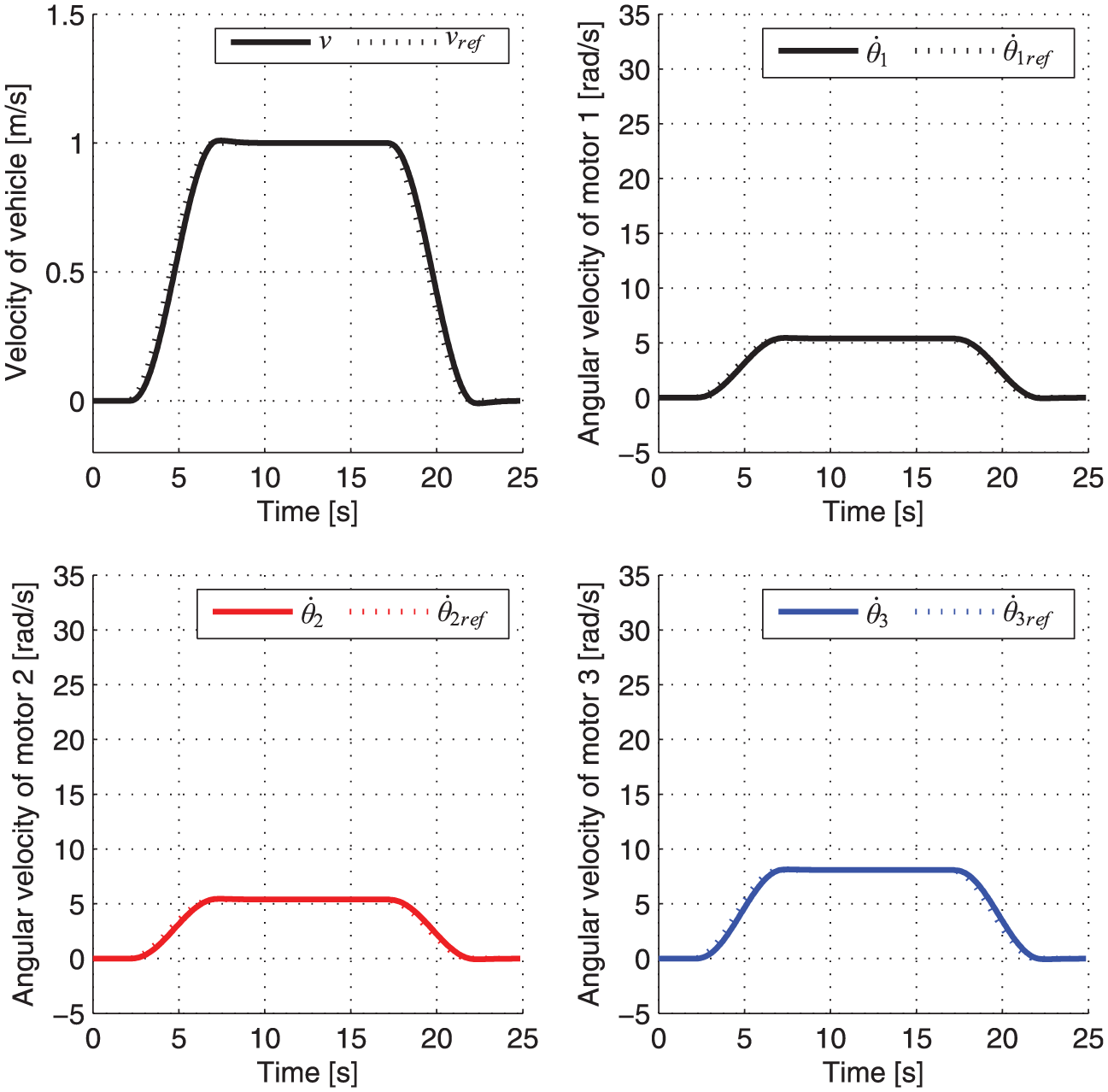
Simulation results with SMC (d = 3).
Simulation results with PPC (d = 3).

Simulation results with SMC (d = 3); control input of all motors. Same profile is obtained for

Simulation results with PPC (d = 3); control input of all motors. Same profile is obtained for

Simulation result with SMC depicted in Figure 4.

Simulation result with PPC depicted in Figure 5.
Average of root mean square error (RMSE).
Experiments
In this work, we design an experimental test bed as shown in Figure 2. The proposed controller was experimentally verified and compared with PPC. The control law in equation (17) is implemented using C# language on a laptop PC (OS: Windows 8.1, CPU: 2.3 GHz) with sampling time of 50 ms. In addition, two optical encoders whose resolution is 0.352°/count are attached to motors 1 and 2, and an optical encoder whose resolution is 0.18°/count is attached to motor 3 to measure angular velocities of motors. A pulse counter board with two channels of 24-bit up/down counters and a DA board with 16-bit resolution are used. Motor drivers are also used in a current control mode, by which electric current is supplied proportional to the voltage commanded from the laptop PC to each motor. The control parameter values of PPC and SMC in the experiment are the same with those in simulation. Figures 10–12 show the experimental results of the translational velocity of the WMR and velocity of each motor with SMC and PPC, respectively.

Experimental result with SMC.

Experimental result with SMC (sat(.)).

Experimental result with PPC.
The tracking performance of a redundant wheeled drive system is improved using SMC as shown in Figures 10–12. Figures 13–15 show experimental results of the control input of each motor corresponding to Figures 10–12, respectively. The chattering in the control input as shown in Figure 10 can be eliminated by replacing the sign(.) function by saturation function, sat(.), as shown in Figure 14. Tracking error resulting from both control approaches in the experiment is shown in Figures 16–18. It can be seen that the SMC approach achieves smaller tracking errors than PPC. To verify the repeatability of SMC approach, the same experiments that were performed in Figures 10–15 were repeated five times and the mean value of the tracking error magnitude was compared with PPC approach as shown in Figure 19. It can be seen that the SMC approach reduced the mean value of the tracking error magnitude, and it provides robust tracking control in the real environment.

Experimental result with SMC; control input of all motors.

Experimental result with SMC (sat(.)); control input of all motors.

Experimental result with PPC; control input of all motors.

Experimental result with SMC depicted in Figure 10.

Experimental result with SMC (sat(.)) depicted in Figure 11.

Experimental result with PPC depicted in Figure 12.

Experimental result. Mean tracking error magnitude.
The circular motion was obtained by the SMC of the WMR on a circle with a radius of 2 m, and the same S-curve velocity profile with the linear motion for tangential velocity, 34 as shown in Figures 20 and 21. This trajectory is considered for energy comparison in the next section.

Experimental result for circular motion with SMC.

Experimental result for linear and angular velocity for circular motion depicted in Figure 20.
Energy evaluation
Mobile robots are operated using embedded batteries, and hence, energy saving is studied to increase the operation time. Energy required for the motors is obtained by the following equation 33

where E is the total energy consumption. Figures 22 and 23 show simulation results of total energy consumed in all motors for various values of d using SMC and PPC for linear and circular motion, respectively. We can see that in the simulation, SMC and PPC approaches have the almost same energy consumption. In addition, in both cases,
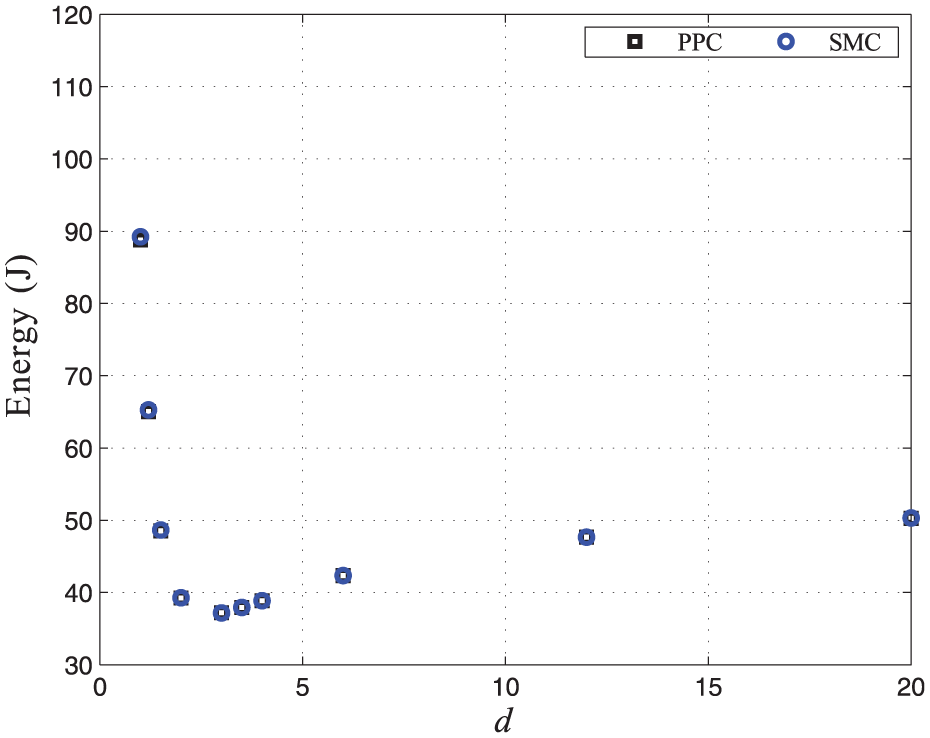
Simulation result total energy consumption for linear motion.

Simulation result total energy consumption for circular motion.
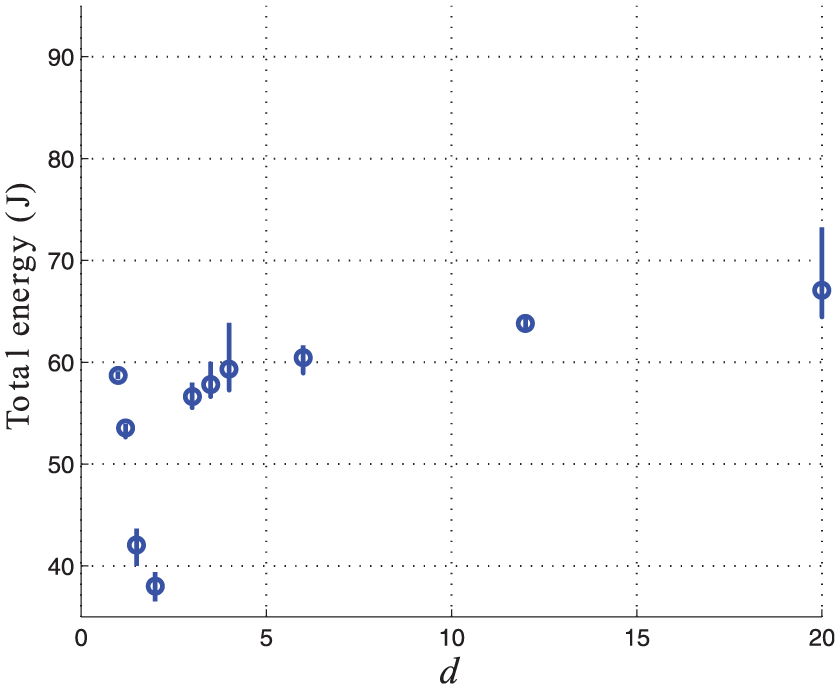
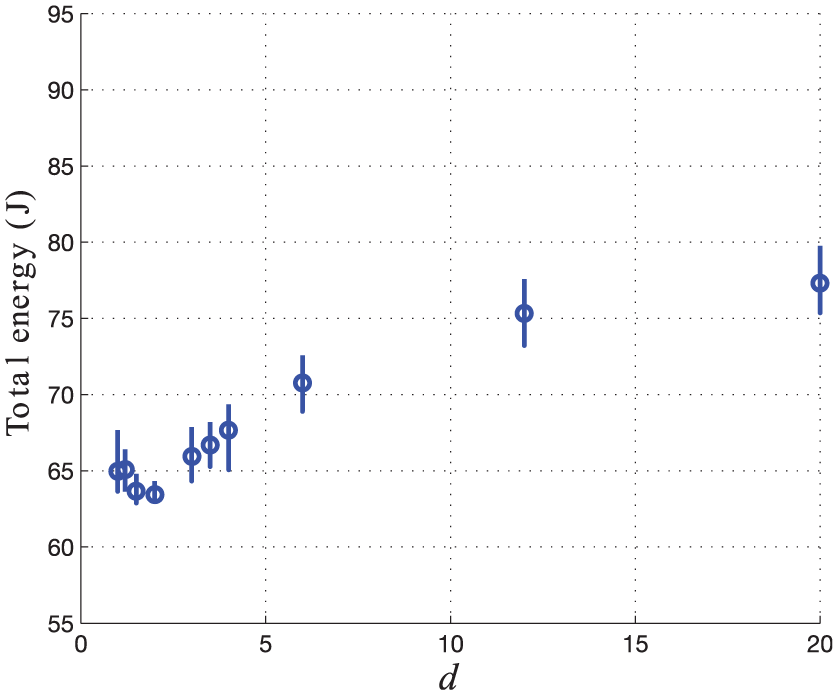
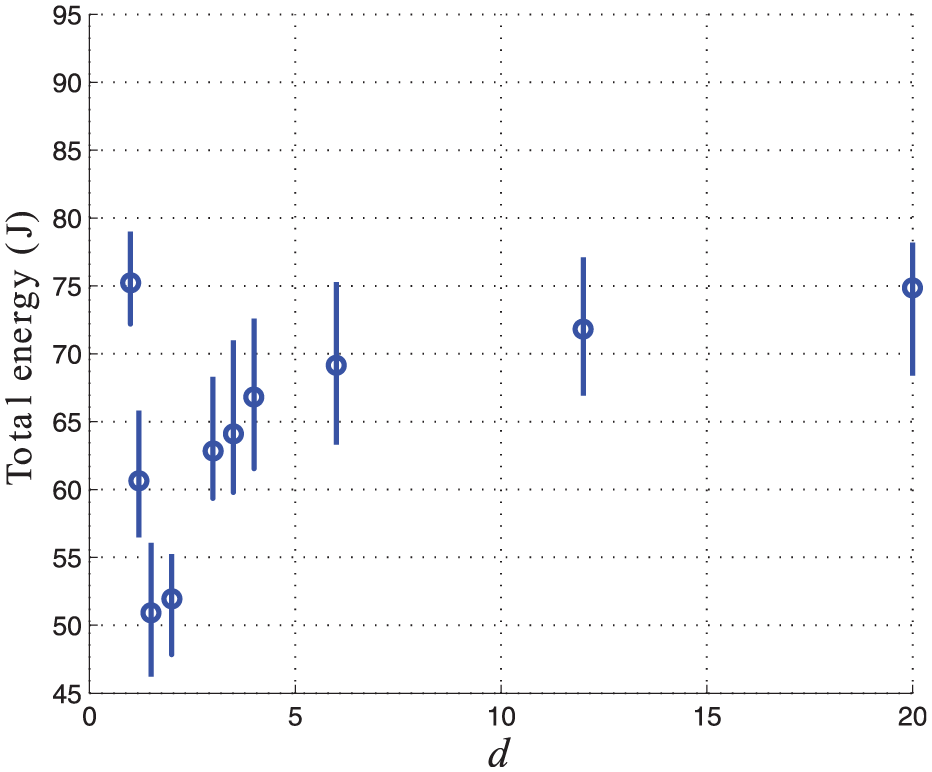
The practicability was verified by conducting five times experiments with the same condition. Figures 24–26 show the total energy consumed in all motors for various values of d for linear motion using SMC and PPC, respectively. The minimum mean energy required was 50.08 J using SMC (

Experimental result with SMC; total energy consumption for linear motion.
Experimental result with SMC (sat(.)); total energy consumption for linear motion.
Experimental result with PPC; total energy consumption for linear motion.
Experimental result with SMC; total energy consumption for circular motion.

Experimental result with PPC; total energy consumption for circular motion.
From the viewpoint of the tracking performance and consumed energy in simulation and experiment, the SMC approach is more effective only in the real case with disturbance. Equation (17) consists of three parts, first part is feed forward control which gives better tracking, the second part is position and velocity feedback control that is similar as PPC, and the last part guarantees the robustness. These control terms have good effect for tracking performance without increasing energy consumption.
Conclusion
In this article, we consider robust tracking and energy saving control for a redundant wheeled drive system using SMC. According to the distribution controller presented in our previous paper (design of a redundant wheeled drive system for energy saving and fail safe motion), comparative study with PPC was conducted. Computer simulations are performed to verify the effectiveness of the proposed method, and there is no significant difference between the SMC and PPC approaches. The effectiveness and reliability of the proposed method are evaluated by multiple times experiments in real environment with disturbance. Experimental results show that the SMC provides robust tracking performance with less energy. Future work will consider to find optimal value of a fixed ratio d. Experiments on rough terrain and public road with large distance will also be studied.
Footnotes
Academic Editor: Bin Xu
Author note
Author Shuaiby Mohamed is also an IEEE member.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.