
Abstract
The road of a greenhouse is both damp and narrow, and there are both ground obstacles and space obstacles in a greenhouse, which easily cause the instability problem for a four-wheel independent driving greenhouse spraying mobile robot turning in the greenhouse. In order to improve the steering performance of the greenhouse spraying mobile robot, based on the characteristics that each wheel torque of the robot can be separately controlled, the dynamic model of the four-wheel independent steering system is firstly established using D’Alembert’s principle and choosing the sideslip angle and the yaw velocity as the state variables. Then, based on the theory of sliding mode control, a dynamic sliding mode control strategy with exponential approaching rate is proposed by adopting the sideslip angle and the yaw velocity as the joint control variables in order to make the sideslip angles be in the stable range and make the yaw velocity track the desired value well. Finally, the simulation of the steering performance is performed using MATLAB/Simulink. The control response curves of the yaw velocity and the sideslip angle of the robot’s mass center in a step input and in a sinusoidal input are obtained, respectively. It is shown from the simulation results that compared with the feedforward–feedback control method, the proposed dynamic sliding mode control strategy based on the established dynamic model is effective to improve the turning control stability of the mobile robot for greenhouse spraying. The experiment results further verify the feasibility of the proposed turning control strategy.
Introduction
A four-wheel independent driving mobile robot has a high degree of flexibility when working in the small space of the greenhouse. 1 –5 However, the greenhouse is damp and narrow, also the ground is wet and uneven, which will easily cause the understeer or oversteer, and this will not only result in respray or leak spray but also even lead to the overturning of the whole robot which will cause serious damage to the plants in the greenhouse and the robots themselves when the greenhouse spraying mobile robot is in the corner. Therefore, it is necessary to consider the turning control problems when a four-wheel independent driving mobile robot is working in the environment of a greenhouse, which is called steering stability problems.
The steering stability of the mobile robot is affected by the sideslip angle and the yaw velocity. The sideslip angle of a mobile robot reflects the trajectory tracking performance. It represents that the real trajectory and the desired trajectory of the mobile robot are basically the same when the sideslip angle is close to zero. The stability of the mobile robot can be described by the yaw velocity of the robot. The yaw velocity also reflects the turning ability and the stability of the robot when it is turning. 6 Consequently, the turning motion control problem is considered from the sideslip angle and yaw velocity of the mobile robot.
Currently, the turning motion control of mobile robot is mainly based on the error control of feedback theory. 7 This control method is easy to design and implement, but the parameter uncertainty and external disturbance of the mobile robot are not considered. It is often difficult for the mobile robot to maintain a stable working performance in a changing working environment. But the related research about the steering stability control of a wheeled mobile robot is rarely reported at present. The control strategies of the steering stability for electric vehicle mainly include the feedback control, 8 the fuzzy control, 9,10 the feedforward–feedback control, 11 and so on. Above studies are all talking about the electric vehicle, which are not related to the control of the interaction forces between the wheels and the ground. However, for the mobile robot working in the greenhouse, the performance of driving and steering is closely related to the interaction forces between the wheels and the ground. Therefore, the control strategies mentioned above couldn’t be applied to the mobile robot in a greenhouse.
To solve the problem of steering stability control for a greenhouse spraying mobile robot, firstly, a dynamic model of the four-wheel independent steering system is established using D’Alembert’s principle, in which taking the sideslip angle and the yaw velocity as the state variables. Since the dynamic sliding mode controller has a good dynamic performance and strong robustness to effectively solve the control issues of the nonlinear system, a dynamic exponential-reaching sliding mode control strategy based on the errors between the expected values and the actual values of the mobile robot yaw velocity and sideslip angle is proposed by applying the sliding mode control method. 12,13 In conclusion, the proposed control method made the greenhouse spraying mobile robot sideslip angle to zero and the yaw velocity track the expected values with high performance, which effectively improves the steering stability of the mobile robot.
Mobile robot kinematic and dynamic analysis
Kinematic model of four-wheel individual driving mobile robot
The prototype of four-wheel independent driving greenhouse spraying mobile robot is shown in Figure 1.

The prototype of greenhouse spraying mobile robot.
For the convenience of kinematic analysis, the four-wheel independent driving mobile robot can be simplified into a platform of two wheels that takes the center line of front and rear wheels as axis. The pose description of the mobile robot is shown in Figure 2, in which M(x,y) represents the position of the mobile robot center point, θ represents the angle between the forward direction of the mobile robot and the X-axis (the counterclockwise direction is positive), 2r is the diameter of the drive wheel, 2b is the width of the robot, and


The pose description of the mobile robot.
where
Considering the tracking of desired pose


The trajectory tracking model of the mobile robot.
where
Dynamic model of four-wheel individual driving mobile robot
The coordinate system established for a greenhouse spraying mobile robot is shown in Figure 4,
13
in which

The coordinate system of the mobile robot.
According to D’Alembert’s principle, considering the structural rigidness of the four-wheel mobile robot, we can establish the dynamic model of the four-wheel mobile robot formula without considering the skewing movement as equations (3) to (5)



The formulas of (3) to (5) collectively provide the dynamic model of the four-wheel individual driving mobile robot greenhouse sprayer, in which m represents the total mass of the mobile robot in kilogram,
Dynamic model of four-wheel independent steering
Here is the establishment of dynamics model of the four-wheel independent driving greenhouse spraying mobile robot with the status variables of the yawing velocity and sliding angle of the mass center.
With the relatively small radial velocity

Therefore,

in which ay represents the absolute acceleration of the robot’s mass center on the axle of C − yR.
By substituting formula (7) into formulas (4) and (5), considering the mobile robot in greenhouse spraying operation, because of the job’s need, the steering angle δ of the wheel and the resulting sideslip angle of the mass center are rather small, so we can suppose cosδi ≈ 1 and sinδi ≈ 0, and then, we have
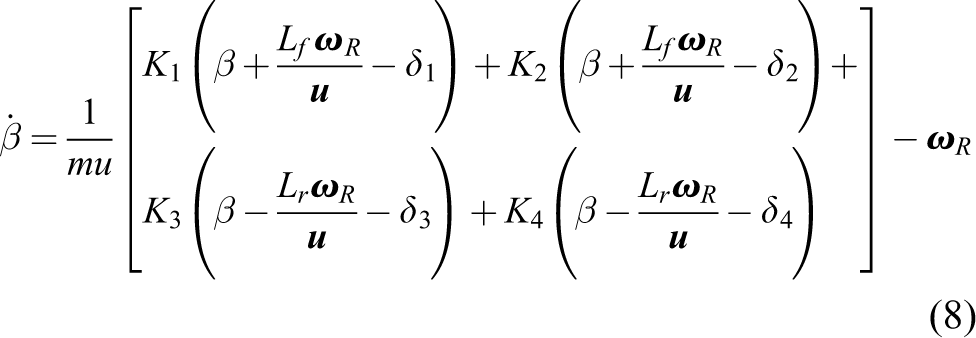
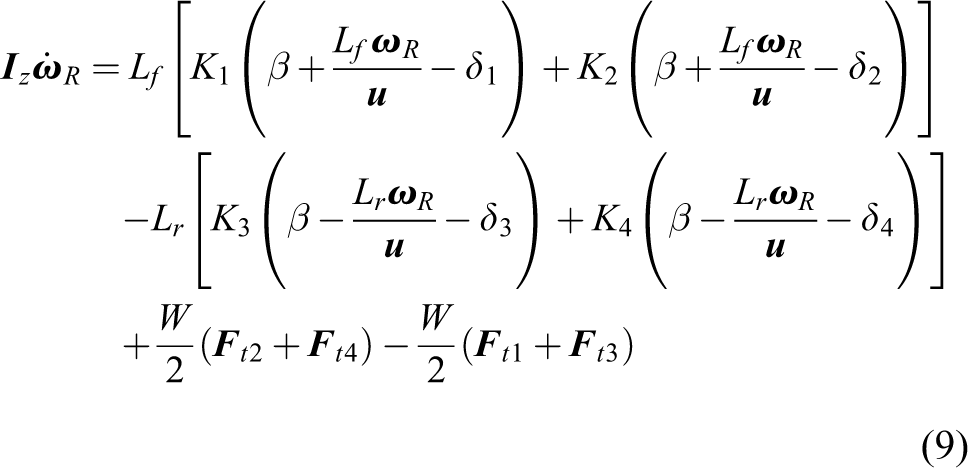
Thus, the systematic dynamic model of the robot is established by formulas (8) and (9) with the sideslip angle and yawing velocity of its mass center as the status variables, in which Ki is the coefficient of the wheel mobile robot side force and the sideslip angle which can be achieved by simulating the side force and the sideslip angle linearly,
Ideal model of the mobile robot
Trajectory tracing is an easy task for the ideal mobile robot in motion with the expected ideal sideslip angle of its mass center being zero, which means the steady sideslip angle of the spraying greenhouse robot should be zero in ideal state, and then the expected value model of sideslip angle and yaw velocity of the mobile robot are


in which

k21, k31, and k41 reflect the geometrical relationship between the steering angles of the four wheels which can be derived from Figure 2.
The response of the model in formulas (10) and (11) appears to be a second-order system, which will increase the complexity of the control system when adopted as the ideal sliding velocity response. Instead, we can simplify the response model into a first-order system to acquire the differential formula of the sideslip angle and the yaw velocity of the mass center of the robot at the ideal state:


Control system design of the mobile robot
The typical greenhouse mobile robots are those with prominent nonlinearity and operated under the environment of highly uncertain external disturbances, which can hardly be properly coped by traditional control methods like factored moment or feedback control. 14 This article proposes a new control strategy for the steering motion of the greenhouse robot with independently steering wheels based on the sliding model control, and the block diagram of the control system is shown in Figure 5.

Dynamic sliding mode control block diagram of the mobile robot.
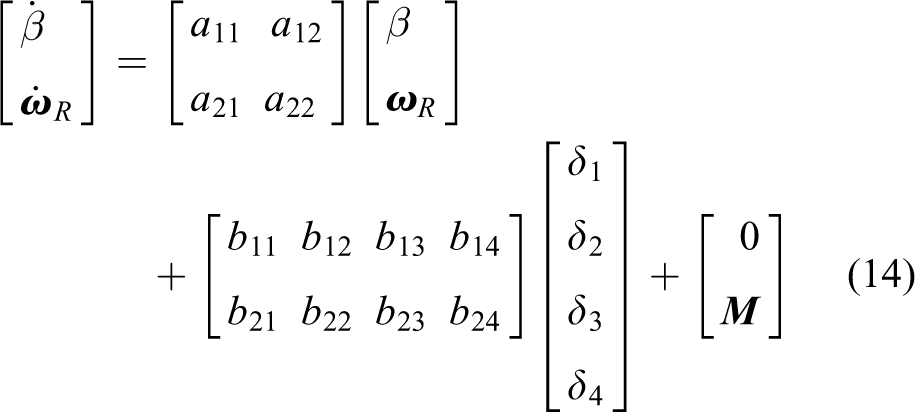
In this article, the system status variable of the mobile robot is
Controlled variable is
Design of sliding mode surface
The system status error is defined as follows

in which

Switching surface of the designed sliding mode is

in which c is the finite proportion coefficient and
Design of sliding mode controller
The movement of the sliding mode is completed in two stages, that is, the approaching movement and the sliding model movement. The former describes the movement of the system from its initial status at random toward the transforming surface. Any system reaching the transforming surface within the limited time is capable of moving to the sliding model movement stage without any limitations of its specific movement trajectory, while the approaching performance of the system can be improved by simply adjusting the reaching law. 15,16 The control strategy based on the exponential-reaching law is not only capable of improving the speed property of the system by reducing the time for the reaching movement but also helping to improve the steadiness of the system in motion by keeping the system moving at a relatively low speed when reaching the transforming surface. The process of approaching in the system is a gradual process in the case of the simple exponential reaching, in which the timely reaching cannot be guaranteed. Therefore, a uniform-speed reaching item is added into the scenario, as shown in formula (18), with s approximating 0, and the reaching speed as ε instead of 0, in order to make sure the motor point of the system reaches the transforming surface at the limited period of time.

in which

According to the obtained dynamic system model of the sideslip angle and yaw velocity, differential equations that compare the expected value introduce formulas (8), (9) and (12), and (13) into formula (16) deviation equation


By introducing formula (20) and(21) into (19), we have
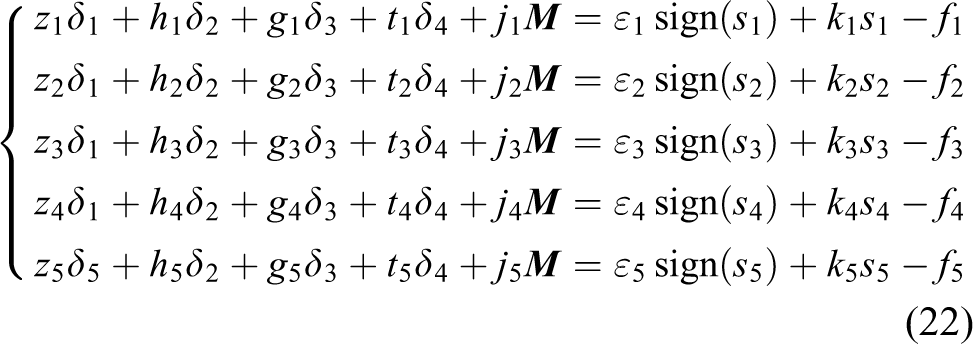
in which
From which the controlled variables,

in which

Driving force distribution of the four-wheel mobile robot
During the course of sliding mode control, the motion controller outputs the variations required for the yawing moment, making the actual values of the yaw velocity and the sideslip angle approximate the expected values. Especially in the case of the four-wheel mobile robot in unstable status, the robot could maintain stable via the yawing moment control. Yet, the yawing moment

Along with the yawing moment of the four-wheel mobile by the driving force

The distribution of the driving force should be made in the way that both the requirements on the yawing moment and that on the acceleration performance of the robot should be taken into consideration. With the air drag neglected for the greenhouse spraying robot, we have

The driving force of the wheel is limited by the adhesive force of the wheel when the robot is in motion in order to prevent the trackslip

where
The driving and braking forces of the robot wheel can be calculated by formulas (26) and (27), which are subject to the linear superposition to work out the distributed driving forces on each wheel accommodating inequality (28).
Simulation and experiment results
Simulation results
Abovementioned methods are demonstrated by means of simulations in MATLAB/Simulink. Simulation experiments are respectively carried out on the steering stability of the four-wheel greenhouse spraying robot on the conditions of the exponential-reaching sliding mode control and the feedforward–feedback control to demonstrate the effectiveness of the dynamic control strategy presented in this article.
The block diagram of feedforward–feedback control of greenhouse spraying mobile robot is shown in Figure 6.

Feedforward–feedback control block diagram of the mobile robot.
Figure 6 shows the feedforward–feedback controller using proportional control, which is based on sideslip angle and yaw velocity deflection, and the ratio coefficient is optimized by simulation and the optimal value is 278. The feedforward controller is designed based on inverse dynamics model of a mobile robot.
In the experiments, the robot is driven forward at constant speed. The simulation parameters are shown in Table 1.
Simulation parameters.

The speed of the mobile robot in the simulation experiments is 2 m/s and a steering signal is an input after 1 s. The step response curves of the robot’s mass-center sideslip angle and yawing velocity when the input of steering angle is 0.2 rad are presented in Figure 7. Comparison is made between the exponential-reaching sliding mode control and the feedforward control on the mass-center sideslip angle response and yaw velocity response of the ideal model of the four-wheel mobile robot in this figure. In feedforward control mode, the yaw velocity of the robot is finally stabilized after a short time of 0.23 s, with the steady-state error of 0.1 rad/s against the expected level, and the steady-state error of the mass-center sideslip angle is 0.2 rad against that of the ideal model; while in the sliding mode control mode, the yaw velocity of the robot regains stability after 0.13 s, with the steady-state error of only 0.1 rad/s against that of the ideal model, and the steady-state error of the mass-center sideslip angle is only 0.03 rad against that of the ideal model.
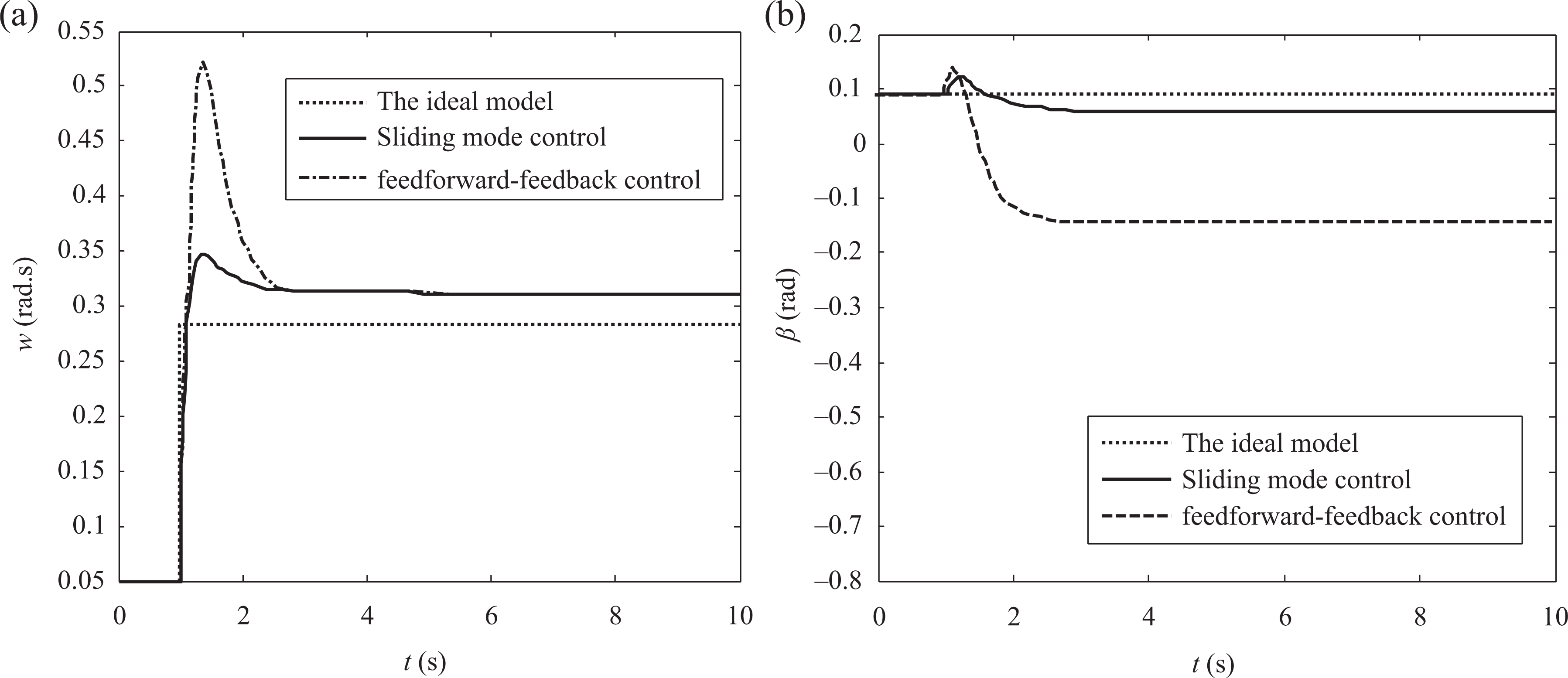
The control responses of the yaw velocity and the sideslip angle in a step input. (a) The control responses of the yaw velocity in a step input. (b) The control responses of the sideslip angle in a step input.
The instant center and steering radius of the robot in steering motions change from time to time, thus it is infeasible to demonstrate the performance of the steering control strategy by simply inputting a fixed step signal. Instead in this article, based on the method of automobile control stability assessment specified by the ISO standards, this strategy is analyzed with the sine steering input. The robot in simulation moves forward at 2 m/s, then receives a 0.1 rad sine steering signal 3 s later. The responses of the mass-center sideslip angle and the yaw velocity of the robot to the sine steering input are presented in Figure 8. We can see that the maximum error of the yaw velocity against the expected level in the front-feed control is 0.14 rad/s, and the maximum error of the mass-center sideslip angle β against the expected level is 0.05 rad from this figure; while in the exponential-reaching sliding mode control, such errors are merely 0.01 rad/s (approaching the expected level of 0.18 rad/s) and 0.03 rad, showing a significant improvement on the moving stability of the robot in steering motions compared with the feedforward control.
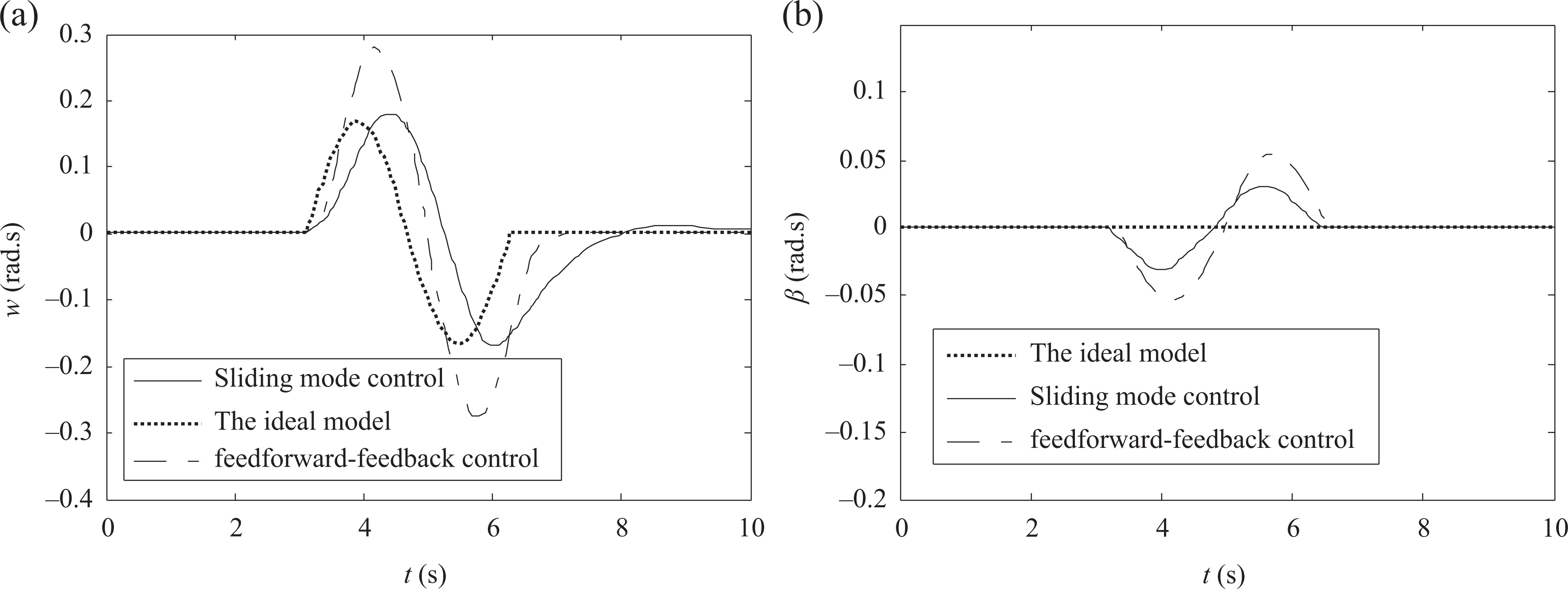
The control responses of the yaw velocity and the sideslip angle in a sinusoidal input. (a) The control responses of the yaw velocity in a sinusoidal input. (b) The control responses of the sideslip angle in a sinusoidal input.
Experiment results
The weight, length, width, and height of the prototype of the mobile robot are, respectively, 32 kg, 0.485 m, 0.485 m, and 0.43 m. The control system mainly includes the host computer ThinkPad X220, the single-chip microcomputer ATxmega64A3, DC motors, and the encoders. The motion subsystem consists of four parts: walking support chassis, power energy unit and interface unit, sensory system unit, and control system unit and peripheral loading unit. The proposed dynamic exponential-reaching sliding mode control strategy was realized through VC++ software programming. The experiment was carried out in the greenhouse of Jiangsu University.
The desired trajectory of mobile robots is shown in Figure 9. The real-time state of motion experiment at each moment is shown in Figure 10. By using the proposed dynamic exponential-reaching sliding mode control strategy, the mobile robots firstly moved in a straight line in 3.64 s. After that, the mobile robots turned right-angled successfully. In the experiment, the mobile robots maintained a good stability and precise tracking capability without understeer or oversteer. The experimental results show that the proposed dynamic exponential-reaching sliding mode control strategy can be applied to steering motion control of a mobile robot for greenhouse spraying effectively.

The desired trajectory of turning control of mobile robot.
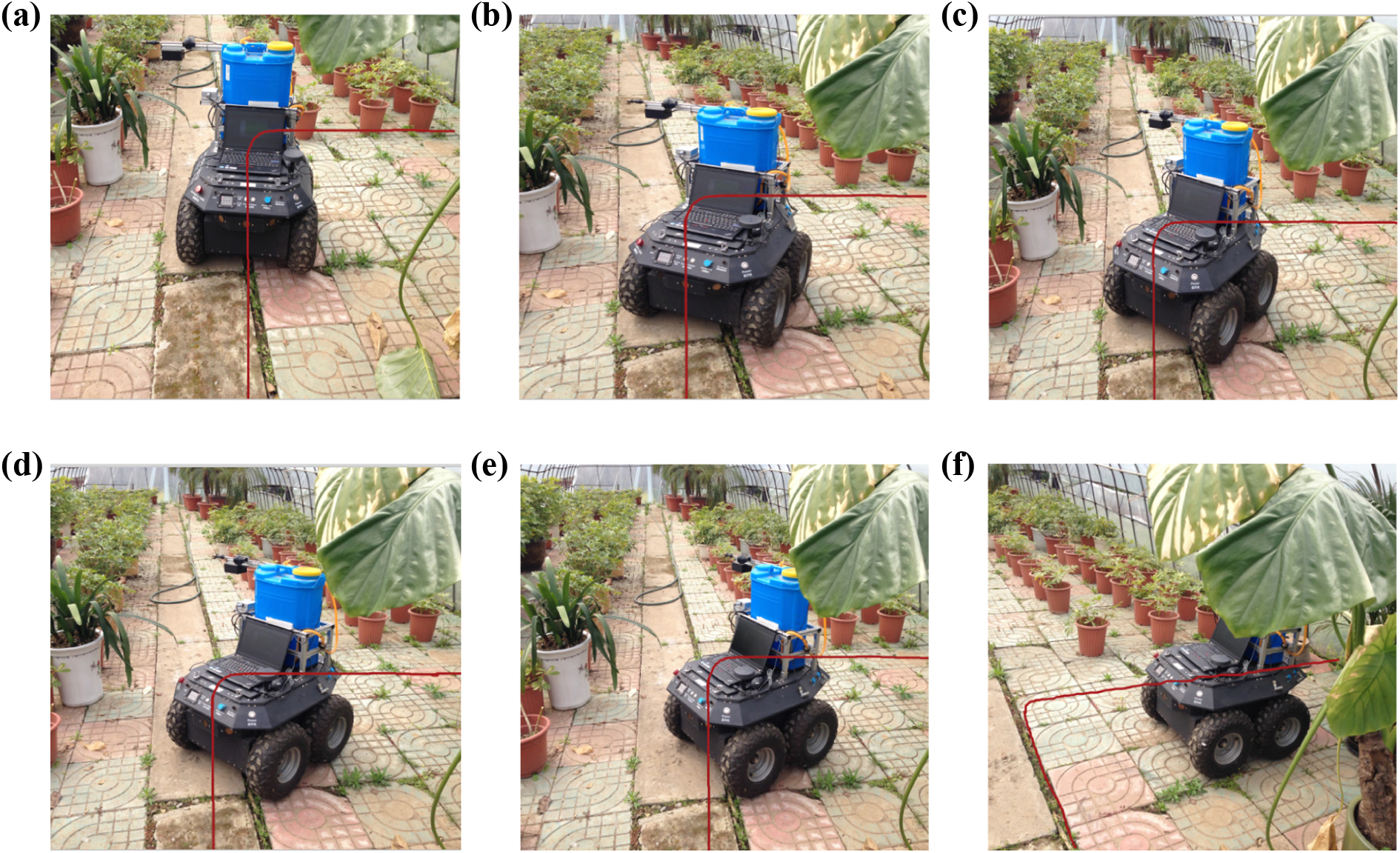
Greenhouse turning tests of mobile robot. (a) t = 3.64 s. (b) t = 4.04 s. (c) t = 4.24 s. (d) t = 4.30 s. (e) t = 4.40 s. (f) t = 4.50 s.
Conclusion
This research focuses on how to improve the turning control stability of a four-wheel independent driving greenhouse spraying mobile robot turning in the greenhouse.
The main research and innovative work are as follows: For the problem of the steering control of the four-wheel independently driven greenhouse spraying mobile robot, the dynamic model of four-wheel independent steering and the expected motion model of sideslip angle and yaw velocity of the mobile robot are established using D’Alembert’s principle. A dynamic exponential-reaching sliding mode control strategy is proposed by taking the mass-center sideslip angle and the yaw velocity of the robot as the state controlled variables of the control system. Simulation experiments are respectively carried out on the steering stability of the four-wheel greenhouse spraying mobile robot on the conditions of the feedforward–feedback control and the exponential-reaching sliding mode control. The simulation results show that the dynamic exponential-reaching sliding mode control can control the mass-center sideslip angle and the yaw velocity of the robot in steering motions more effectively, generate the transient and steady responses better, and improve the steering stability of the mobile robot. The proposed control strategy is realized through VC++ software programming, and the steering motion experiment is carried out in the greenhouse. The experimental results further verify the feasibility of the proposed exponential-reaching dynamic sliding mode control strategy, and it can be applied to steering motion control of a mobile robot for greenhouse spraying more effectively and also lays a foundation for the precise spraying of a mobile robot in the greenhouse.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (grant no 51375210) and the Priority Academic Program Development of Jiangsu Higher Education Institutions and Science and Technology Program of Jingkou, Zhenjiang, China (grant no jkGY2013002).