
Abstract
This study presents a blocking flow shop deteriorating scheduling problem which has a widespread application in manufacturing and service systems. In the investigated problem, there is no buffer between machines, and the actual processing time of jobs on each machine is described as a linear function of their starting time and normal processing time. In order to deal with this problem more efficiently, this study develops a hybrid chemical reaction optimization algorithm, where some special strategies are developed based on the problem characteristics, for example, solution representation, on-wall ineffective collision, decomposition, inter-molecule ineffective collision, and synthesis reactions. In addition, a variable neighborhood search is designed to strengthen the search ability of the chemical reaction optimization algorithm. Computational simulation experiments on a set of instances and performance comparisons are provided. They show that the proposed algorithm is superior to the standard chemical reaction optimization and genetic algorithm, which demonstrates that the proposed algorithm is a promising optimizer for the investigated problem.
Introduction
Flow shop scheduling is one of the most well-known and difficult combination optimization problems,1,2 and it has a widespread application in manufacturing systems, even in service systems.3,4 In recent years, it has gained an increasing concern from operational and industrial communities.5,6 As for the computational complexity, it has been proved that the flow shop scheduling problem with more than two machines is nondeterministic polynomial (NP)-hard in the strong sense. 7 Therefore, the flow shop scheduling problem has been extensively studied in the past few years.8–11
In order to make the scheduling models more suitable for real-world manufacturing systems, Gupta and Gupta 12 investigated a deteriorating scheduling model in a single machine case, where the processing time of jobs was an increasing function of their starting time. Since the deteriorating scheduling model can describe a scheduling problem more comprehensively, it has attracted much attention in manufacturing and service systems. The flow shop deteriorating scheduling problem has been extensively studied in recent years,13–16 and it has been proven to be an NP-hard problem when there are more than two machines. 17 The blocking flow shop scheduling problem is one of the best known branches of the flow shop scheduling problem.18,19 It usually appears in the environment where the processed jobs are kept in the machines because of lack of intermediate storage 20 or storage is not allowed in the manufacturing process due to the technological requirements. 21 In the blocking flow shop scheduling problem, there are no buffers between machines, and the jobs that have been completed processing on a machine has to remain on that machine until the next machine is available. Since the blocking flow shop scheduling problem is important in both academic and engineering applications, great attention has been paid to develop its effective techniques.22–25 However, the blocking flow shop deteriorating scheduling problem has not attracted so much attention in existing studies. Over the past decades, some efforts have been made to the two-machine flow shop deteriorating scheduling problem.26–28 Nevertheless, the existing scheduling model and solution techniques are not suitable for solving the blocking flow shop deteriorating scheduling problem when there are more than two machines in a blocking flow shop environment. Therefore, it is necessary to develop a suitable scheduling model and optimization algorithm to cope with this problem.
Chemical reaction optimization (CRO) algorithm is one of the best known population-based meta-heuristic algorithms.29,30 It mimics the behavior of the molecules in a chemical reaction system microscopically and tries to capture the phenomenon that reactions give products with the lowest energy. Since the CRO is effective and easily implemented, it has gained a wide range of successful applications in vehicle routing problem, 31 job shop scheduling problem, 32 knapsack problem, 33 grid scheduling problem 34 in the past few years. Since the optimization problems we have to deal with become more and more complex, it is necessary to investigate the effective meta-heuristic frameworks to deal with real-world and large-scale optimization problems. Recently, the reasonable combination of two or more meta-heuristic techniques shows the superiority in improving the performance of algorithm, and it plays an important role in solving some optimization problems nowadays. 35 Therefore, this study aims to design a hybrid framework to make the CRO algorithm more powerful to deal with the complexity optimization problem like the investigated blocking flow shop deteriorating scheduling problem in this study.
Motivated by the existing research on the flow shop deteriorating scheduling problem, we can conclude that there are few studies focusing on the blocking flow shop deteriorating scheduling problem with more than two machines. However, there are multiple machines in the real-world situation, for example, in the production of steel, the molten steel undergoes a series of operations such as molding into ingots, unmolding, reheating, soaking, and preliminary rolling. 36 This is a classical blocking production environment due to the production technology and lack of storage capacity between the intermediate machines or work stations. In addition, the jobs in this situation could lose heat energy, and the longer processing time will be needed if they are processed later. In order to describe the practical production process like this situation, this article proposes a blocking flow shop deteriorating scheduling problem, where multiple machines in series are needed to process a set of jobs. A 0-1 mixed integer programming model is built to minimize the maximum completion time, that is, the makespan. In order to address this problem efficiently, a hybrid CRO algorithm is developed, where the solution representation and four elementary reactions are designed based on the problem characteristics. In addition, a variable neighborhood search (VNS) algorithm is designed to strengthen its search ability. Simulation experiments are carried out, and the experimental results demonstrate that the proposed algorithm is more effective than the compared algorithms in coping with this problem.
The rest of this article is organized as follows. The blocking flow shop deteriorating scheduling problem is formulated in section “Problem definition.” The basic idea of standard CRO (SCRO) is introduced in section “Basic idea of SCRO.” Section “Proposed algorithm” describes the proposed algorithm. The simulation experiments are carried out, and the analysis on the experimental results is shown in section “Computation results and comparisons.” Section “Conclusion” gives the conclusion and outlooks the future research.
Problem definition
The blocking flow shop deteriorating scheduling problem can be defined as follows. Each of n jobs from the set








where equation (1) represents that the objective is to minimize the maximum completion time. Constraints (2) and (3) ensure that at any time, each job can be processed on one machine and each machine can process at most one job, and they also ensure that a job is allowed to leave if the next machine is free. Constraint (4) stipulates the order relation of the different jobs. Constraint (5) denotes that the actual processing time of jobs is an increasing linear function of their starting time. Constraint (6) defines the maximum completion time. Constraint (7) demonstrates the range of variables. Constraint (8) represents that the decision variables can take values of 0 or 1.
Basic idea of SCRO
CRO was proposed by Lam and colleagues29,30 in 2010, which simulates the chemical reactions of a set of molecules microscopically and tries to capture the energy in the reaction process. In the following sections, the basic idea of SCRO is described in detail.
Elementary element of CRO
Molecule is an elementary element of CRO, and the molecular structure represents a solution of the investigated optimization problem. A molecule is composed of several atoms, which is characterized by the atom type, that is, bond length, angle, and torsion. The molecules are distinguished by the atoms and the atom type. In the SCRO, each molecule has two kinds of energies, which are called PE (potential energy) and KE (kinetic energy). The PE corresponds to the objective value of a molecule, whereas the KE indicates the ability of a molecule to escape from local optima. Let

Suppose that a new molecule

Elementary reactions of CRO
CRO optimizes a problem by four elementary reactions called on-wall ineffective collision, decomposition, inter-molecular ineffective collision, and synthesis reactions. The new molecules will be generated based on the original molecules in the population by the four reactions. If some condition satisfies, the new molecules are allowed to replace the original molecules. The four elementary reactions are described as follows.
On-wall ineffective collision reaction
The on-wall ineffective collision occurs if a molecule

where

Decomposition reaction
The decomposition is described as the process of hitting the wall. This collision makes the molecule
Situation 1. The condition in which this situation occurs is as follows

The KE of


Situation 2. The condition in which this situation occurs is as follows

The KE of


where

Inter-molecule ineffective collision reaction
The inter-molecule ineffective collision is used to mimic the process of the two molecules

The KE of the two new molecules are calculated as follows


where k is randomly generated from a uniform distribution
Synthesis reaction
The process of the synthesis reaction is that two molecules

The KE of the new molecules is as follows

Proposed algorithm
As it is stated for the SCRO, it utilizes the on-wall ineffective collision, decomposition, inter-molecular ineffective collision, and synthesis reactions to realize the exploration and exploitation to the solution space. In order to strength its search ability, this section develops a hybrid CRO algorithm, where the CRO and VNS are combined, called CRO-VNS. The solution representation, four elementary reactions, and neighborhood structures are presented based on the problem characteristics. Similar to the framework of the SCRO, the PE of a molecule is its objective value. The KE of molecules is calculated as follows: if the condition as formula (9) in on-wall ineffective collision reaction is met, the KE of a new molecule is calculated as formula (10); if the condition as formula (13) in decomposition reaction is met, the KE of two new molecules is calculated as formulas (14) and (15), or formula (16) is met, the formulas (17) and (18) are utilized to calculate the KE of two new molecules; if the condition as formula (20) in inter-molecule ineffective collision reaction is allowed, then the KE of two new molecules is calculated as formulas (21) and (22); if the condition as formula (23) in synthesis reaction is met, the KE of a new molecule is calculated as formula (24). The proposed CRO-VNS is described as follows.
Molecular structure representation
A suitable molecular structure or solution representation can increase the ability to find the optimal solution. In this study, the permutation representation of problem dimensions is used to represent a feasible and complete solution. For example, (3, 2, 1, 4, 5) is a molecular structure, and it represents that five jobs are processed on each machine as 3→2→1→4→5. Based on this representation, a set of molecules or solutions can be randomly generated.
On-wall ineffective collision reaction
In the SCRO, the on-wall ineffective collision is to change the selected molecule by rearranging the molecular structure and to generate a new molecule. In order to make a new molecule different from the previous one, the insert neighborhood and swap neighborhood structures are used. In the insert neighborhood, two positions are selected randomly, and the job in one position is inserted into the other position. While in the swap neighborhood, two positions are randomly generated, and the jobs in the two positions are swapped. If the condition in formula (10) is met, then let the new molecule replace the old one.
Decomposition reaction
The decomposition breaks one molecule into two or more molecules. In this study, the two swaps are utilized as follows: three positions are randomly selected, and the jobs on the three positions are randomly swapped. An example for the decomposition reaction is shown in Figure 1. The jobs 2, 5, and 3 are randomly selected. The molecule

Illustration of the decomposition reaction.
Inter-molecule ineffective collision reaction
The inter-molecule ineffective collision makes two molecules collide, and two new molecules are developed. In this study, the order-based crossover
37
is utilized to generate two new molecules. Figure 2 shows an example. To produce a new molecule

Illustration of inter-molecule ineffective collision.
Synthesis reaction
The synthesis reaction is utilized to combine two molecules into a new molecule. In the proposed CRO-VNS, a distance preserving crossover
38
is applied to retain the valuable information from two molecules. An example for distance preserving crossover is shown in Figure 3. Two molecules

Illustration of synthesis reaction.
VNS
VNS is a meta-heuristic introduced by Mladenović et al. 39 that exploits the idea of neighborhood change, both in the decent to local minima and in the escape from the valleys containing them. It is obvious that the performance of local search method depends on the choice of neighborhood structures. For the blocking flow shop deteriorating scheduling problem in this study, the swap neighborhood and insert neighborhood are utilized. Since the computational resource is usually limited, the VNS is utilized to refine the best solution found at each iteration. The VNS in this study executes as Figure 4, where the numbers “1” and “2” represent the swap neighborhood and insert neighborhood, respectively.
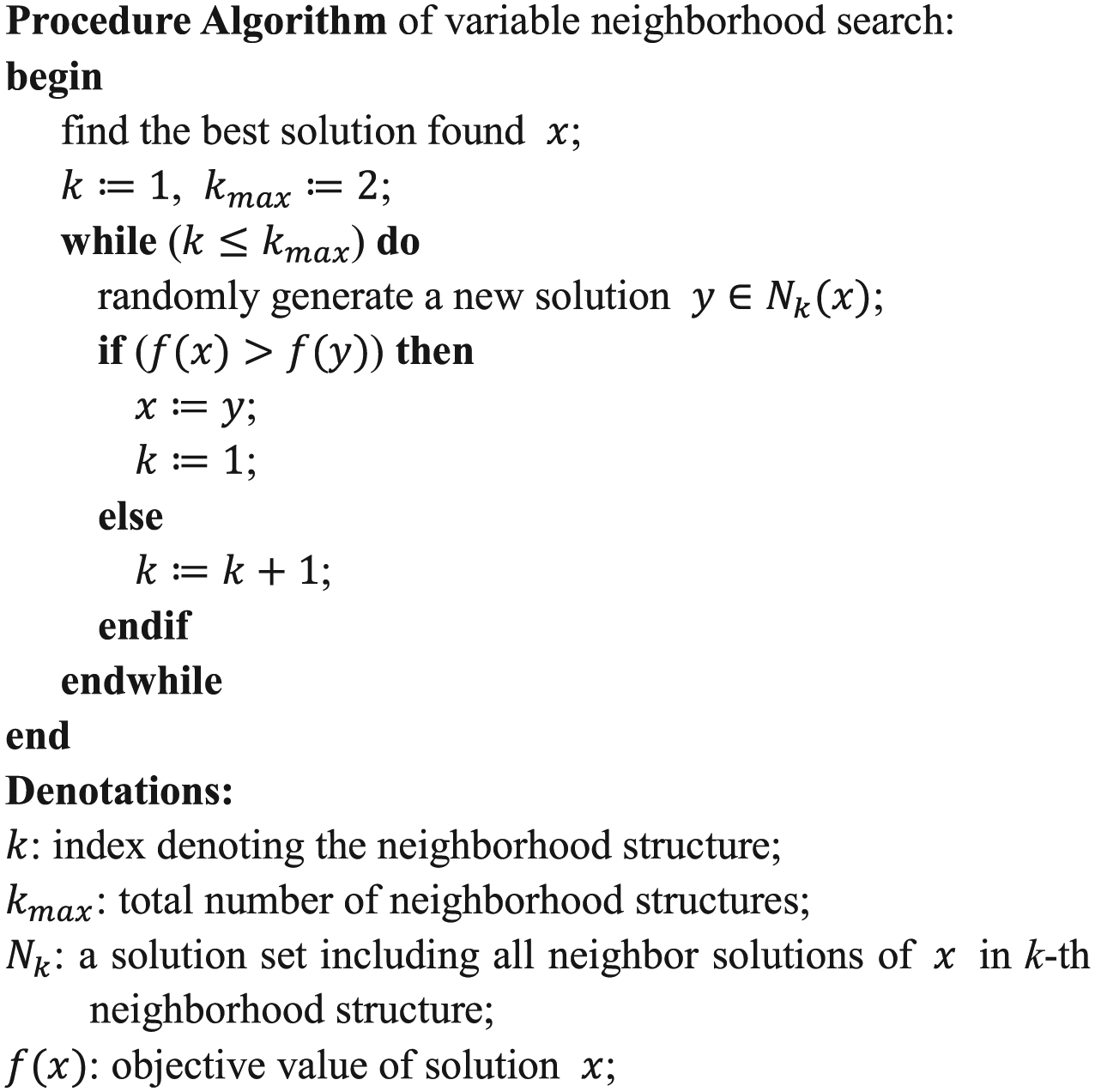
Variable neighborhood search algorithm.
Based on the discussion on the proposed algorithm, we can find that the inter-molecule ineffective collision reaction and synthesis reaction happen between two molecules, and decomposition and on-wall ineffective collision reaction take place in a molecule. The pseudo-code of the proposed CRO-VNS is shown in Figure 5, where the inter-molecule collision condition, inter-molecule ineffective collision condition, and decomposition condition are all algorithm parameters which are defined in section “Computation results and comparisons.” Note that the population P is a set of molecules.

Pseudo-code of the proposed algorithm.
Computation results and comparisons
There are several meta-heuristics based on population which have been successfully applied into the combinatorial optimization problems. The genetic algorithm (GA) is one of the most famous population-based optimization algorithms, and it has been utilized to deal with production scheduling problem, 40 vehicle routing problems, 41 and project scheduling problem. 42 Its strong exploration and exploitation to the solution space motivates us to choose it as a compared algorithm in this study. In addition, the SCRO is also as a compared algorithm to verify the performance of the proposed CRO-VNS.
For the classical flow shop scheduling problem with makespan criterion, Taillard
43
presented a test bed consisting of a total of 120 problems of various sizes. These problems are divided into 12 subsets and each subset consists of 10 instances with the same size. In this study, we choose
The proposed algorithm is coded in C++, and the experiments are executed on a Core-3.3-GHz PC with 2.0-GB memory. To make a fair comparison, the total number of fitness evaluation times is set to

where
The experimental results with the different number of evaluating fitness times are shown in Tables 1–3, respectively.
Computational experimental results of the three algorithms (

CRO-VNS: chemical reaction optimization–variable neighborhood search; SCRO: standard CRO; GA: genetic algorithm.
Computational experimental results of the three algorithms (

CRO-VNS: chemical reaction optimization–variable neighborhood search; SCRO: standard CRO; GA: genetic algorithm.
Computational experimental results of the three algorithms (
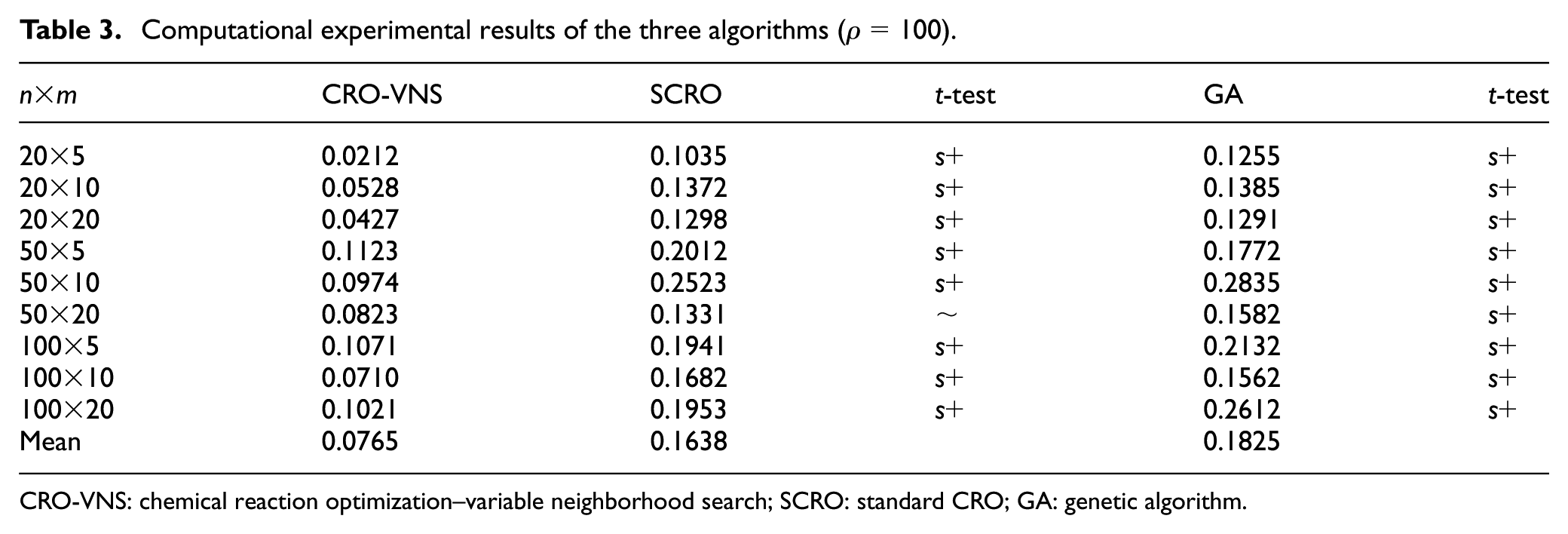
CRO-VNS: chemical reaction optimization–variable neighborhood search; SCRO: standard CRO; GA: genetic algorithm.
Table 1 gives the experimental results with the number of evaluating fitness times 30 mn. It can be seen that the proposed CRO-VNS is the best performer among the three algorithms, and it can obtain the smallest APRE value for all the test instances. The CRO-VNS also has superiority in all the test instances. By observing the results via t-test, we can find that the CRO-VNS is significantly better than SCRO in eight test instances, and significantly better than GA in all the test instances. The experimental results with the total number of evaluating fitness times 50 mn are shown in Table 2. They are also in favor of the CRO-VNS. It can be seen that the CRO-VNS produces the best results than those of the other two algorithms in all the test instances. The results of t-test show that the CRO-VNS are significantly better than SCRO in eight test instances, and significantly better that GA in all the test instances. Table 3 shows the experimental results with the number of evaluating fitness times is 100 mn. It can be found that the CRO-VNS has the best APRE value in all the test instances. The experimental results on t-test indicate that the CRO-VNS performs significantly better than SCRO in eight test instances, and significantly better than GA in all the test instances.
According to the experimental results and analysis, we can find that the CRO-VNS is a promising optimizer in solving the blocking flow shop deteriorating scheduling problem compared with the SCRO and GA. That is to say, the performance of the CRO can be improved by utilizing and combining with the VNS.
Conclusion
This study presents the blocking flow shop deteriorating scheduling problem for the first time. In order to cope with this problem, a hybrid CRO is proposed, where the CRO and VNS are combined to strengthen the search ability. The computational simulation experiments are carried out. The results show that the proposed algorithm is more competitive than the compared algorithms, and it can provide a good decision for the decision-maker when the block and deterioration take place in a flow shop environment.
For the future work, it is interesting to research on the multi-objective design in the case of the blocking and deteriorating flow shop scheduling. It is also necessary to develop more efficient optimization algorithms to deal with this kind of complexity optimization problems like the investigated problem in this study.
Footnotes
Academic Editor: ZhiWu Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the Shandong Provincial Natural Science Foundation, China, under grant no. ZR2016FP02; the Qingdao Postdoctoral Research Project under grant nos 2016027 and 2016012; and the National Natural Science Foundation of China under grant nos 61673228, 51405075, and 21506014.