
Abstract
Recently, the ow shop scheduling problem with deteriorating jobs has gained increasing concern from academic communities and industrial areas. The de- teriorating job is that the processing time of the jobs depends on their starting time. Due to the essential complexity of this problem, most studies focus on the two and three stages setting, and there are few studies that have considered a multiple stage setting. In this paper, a multiobjective ow shop deteriorating scheduling problem is considered, where the objectives are to minimize the makespan and the total tardiness, simultaneously. In order to solve it e_ciently, a novel adaptive multipopulation mul- tiobjective genetic algorithm is proposed. In the proposed algorithm, multiple scalar optimization problems of the multiobjective ow shop deteriorating scheduling prob-lem are developed, which will be introduced into the iteration course in multiple stages. An adaptive multipopulation strategy is designed to construct multiple subpopulations to search the optimal solutions of several scalar optimization problems in parallel. In addition, some special strategies, i.e. selection, crossover, mutation and the evolution of external archives are designed to improve the performance of the adaptive multi-population multiobjective genetic algorithm for the investigated multiobjective ow shop deteriorating scheduling problem. Based on a set of test instances on the multiob-jective ow shop deteriorating scheduling problem, simulation experiments are carried out to examine the performance of adaptive multipopulation multiobjective genetic al-gorithm in comparison with several peer multiobjective evolutionary algorithms. The experimental results show that the proposed adaptive multipopulation multiobjective genetic algorithm performs well when solving the multiobjective ow shop deteriorating scheduling problem.
Keywords
Introduction
The production scheduling problem is one of the most well-known and difficult combinational optimization problems since it has widespread application in manufacturing.1–4 In the classical scheduling problems, the processing time of a job is considered to be constant. However, the scheduling problem with this assumption maybe a limit to its application in a real-world case.5,6 Recently, omitting this assumption and considering a variable processing time of a job has attracted many researchers’ interest in the production scheduling field.7–9 Gupta et al. proposed a deteriorating scheduling model where the processing times of jobs depend on their starting time with a polynomial function. 10 This scheduling model has widespread application in the manufacturing and service industries, such as steel-making, clean maintenance and fire fighting.
The flow shop scheduling is one of the most well-known scheduling problems in the engineering manufacturing and academic fields, and it appears in many real-world applications.11–13 Recently, lots of researchers have studied the flow shop deteriorating scheduling problem (FSDSP). Zhao et al. considered a two-machine no-wait flow shop scheduling problem with deteriorating jobs and machine availability constraints, where the actual processing time of each job was a proportional function of its starting time. 14 Zhao et al. considered the chain precedence constraints and proposed a two-machine flow shop scheduling with deteriorating jobs. 15 Lee et al. investigated the two-machine scheduling problem with deteriorating jobs. 16 Wang et al. proposed a three-machine flow shop scheduling problem with a deteriorating effect under the objective of minimizing the makespan. 17
It is noticeable that existing studies on the flow shop deteriorating scheduling problem focus on two or three stages (machines), and there is little research on a multi-stage setting. However, research on the multi-stage flow shop deteriorating scheduling problem is necessary since it has widespread application in manufacturing systems. Mosheiov studied the complexity of the multi-stage flow shop scheduling problem with a deteriorating effect, and demonstrated that this kind of problem is non-deterministic polynomial (NP)-hard. 18 Sun et al. considered the no-wait, no-idle multi-stage flow shop deteriorating scheduling problem with dominating machines under the objective of minimizing the makespan. 19 Lee et al. investigated a multi-stage flow shop scheduling problem with deteriorating effect, where the objective was to minimize the total completion time. 20 Bank et al. applied a particle swarm optimization and simulated annealing algorithms to solve the flow shop scheduling problem with a deteriorating effect, where the objective was to minimize the total tardiness. 21
Since many real-world applications usually involve multiple scheduling criteria, 22 multiobjective flow shop deteriorating scheduling problems (MOFSDSPs) have gained increasing concern. Cheng et al. considered the objectives of minimizing the total completion time and makespan in two-stage flow shop deteriorating scheduling, 23 the constrain method was used to transform it as a single objective optimization problem, where the objective is to minimize the total completion time subject to the makespan. Cheng et al. proposed the two-machine flow shop deteriorating scheduling problem with the objectives of minimizing the completion time and the total flow time, the weighted sum method was used to transform it into one single objective optimization problem. 24 In fact, the major imperfection of the constrain method and the weighted sum method are that the preference information of the decision maker on the optimization problem must be given subjectively in advance.
However, the decision maker is not always experienced enough in real-word engineering manufacturing optimization problems, and it may lead to a great gap between the actual and expected solution. An alternative idea is to get a set of nondominated solutions, which would be provided to the decision maker to choose from. It is more flexible since the decision maker usually prefers one nondominated solution set instead of one solution.
By analyzing the existing studies, we conclude that prior research is mainly focused on the single objective flow shop deteriorating scheduling problem. However, it is difficult to meet the decision makers’ demands when taking multiple criteria into full account in making a schedule decision. Although the multiobjective flow shop scheduling problem has been considered in the work by Cheng et al., they investigated the two-machine setting, and only one optimal solution can be obtained by utilizing their proposed algorithm.23,24 However, in an actual flow shop environment, there are usually multiple machines, and the decision makers want to get a set of optimal solutions to support their production management. In this case, the existing model and algorithm will not be suitable. To handle this, the general MOFSDSP needs to be addressed, and the production process is comprised of multiple machines. Also, in order to better describe a practical flow shop, besides the traditional constraints, e.g. the precedence constraints, the practical perspective, called the deteriorating effect, should be introduced. To do so, this work establishes the MOFSDSP, and its objectives are to minimize the makespan and the total tardiness simultaneously. In addition, a novel adaptive multipopulation multiobjective genetic algorithm (AMP-MOGA) is adopted to solve the proposed model based on its characteristics.
Compared with the existing research, we have three contributions.
The general multiobjective flow shop deteriorating scheduling problem is proposed to better describe the practical scheduling problem. It optimizes the objectives of minimizing the makespan and the total tardiness simultaneously when the decision maker wants to maximize the machine utilization and customers’ satisfactory degree.
To solve the proposed problem, a novel AMP-MOGA is designed, which includes developing the scalar optimization problem, constructing the multipopulation and the evolution of the multipopulation.
Via experiments on some test instances and comparing with the investigated algorithms in the literature, this work validates the effectiveness and feasibility of the proposed algorithm for solving the MOFSDSP.
The reminder of this paper is organized as follows. The ‘Problem formulation’ section is the problem definition in which the formulation and notations are described and a mixed integer programming model is presented. The solution method is proposed in the ‘Proposed algorithm’ section. Simulation experiments are carried out and the analysis on the experimental results are shown in the ‘Experimental studies’ section. The ‘Conclusion and future research’ section gives the conclusion and outlooks the future work.
Problem formulation
The MOFSDSP can be described as follows. n jobs need to be processed on m machines following the same route, and the jobs’ processing time depends on its starting time. The objectives are to minimize the makespan and the total tardiness simultaneously. The first objective is to maximize the machine utilization, while the second objective is to maximize the customers’ satisfactory level. The following assumptions are invoked for the investigated MOFSDSP.
Each machine can process no more than one job at any time, and each job can be processed on only one machine at any time.
Once a job starts to be processed on a machine, the process cannot be interrupted before completion.
The number of jobs and their normal processing times on each machine are deterministic.
All machines are persistently available, and machine breakdown is not allowable.
All jobs are ready for processing at the beginning and have no precedence constraint among them.
The parameters and decision variables are defined as follows.
Based on the above description and defined parameters, the mathematical model for the mOFSDSP can be presented by the following formulas


subject to







where the objectives given by equations (1) and (2) represent minimizing the makespan and minimizing the total tardiness, respectively. The constraint given by equation (3) ensures that each job can be processed on only one machine at any time. The constraint given by equation (4) ensures that each machine can process only one job at any time. The constraint given by equation (5) defines that the actual processing time of the job is a linear function of its starting time. The constraint given by equation (6) states the order relation of different jobs. The constraint given by equation (7) defines the makespan, and the constraint given by equation (8) defines the tardiness of job
According to the three-field notation introduced by Graham,
25
the MOFSDSP can be denoted as
Proposed algorithm
Evolutionary algorithms are stochastic optimization algorithms based on principles of natural selection and genetics which have been utilized to solve many optimization problems,26–29 and it has been accepted as a basic tool for solving the multiobjective optimization problem.30–32,35 The Multiobjective evolutionary algorithm based on decomposition (MOEA/D), proposed by Zhang et al. is a multiobjective evolutionary algorithm based on a decomposition approach, and it transforms the multiobjective optimization problem into a number of scalar optimization problems, of which optimal solutions are also the Pareto optimal solutions of the multiobjective optimization problem. 33
In the MOEA/D, each individual in the population associated with a different scalar optimization problem, and its solution replacement and selection operations are mainly based on the objective value of its corresponding problem. Inspired by the methodology of the MOEA/D, this study proposes an adaptive multipopulation strategy, which can realize the idea of utilizing a subpopulation to search the optimal solution of one scalar optimization problem. In order to balance the exploration and exploitation, the multipopulation would be constructed for the scalar optimization problems at each iteration based on the distribution of populations in the objective space and decision space. In the following, we will describe the AMP-MOGA in detail.
Scalar optimization problems construction method
In fact, a multiobjective optimization problem is composed of many or even infinite scalar optimization problems. For the MOFSDSP, let

With this method, if multiple weight vectors are determined in advance, the MOFSDSP can be transformed into multiple ordinary scalar optimization problems. In order to solve them simultaneously, we can divide the whole population into multiple subpopulations, and each subpopulation solves one scalar optimization problem. In this study, we consider a set of

In the proposed algorithm, all the weight vectors are divided into multiple groups, and each group contains some uniform distributed scalar optimization problems. As shown in Figure 1, there are 10 scalar optimization problems and three groups developed. In the search process, the three groups are introduced by multiple stages to be solved. For the example, the whole search process is divided into three stages. In the first stage, group 1 is introduced as the current solved problem set. If the condition that allows us to introduce the next group is satisfied, then group 2 is added to the current solved problem set, and group 1 and group 2 are all of the current solved problems. Group 3 is added in the same manner. This method can utilize the good individuals found in the last stage and help to construct the higher quality subpopulation for the newly introduced scalar optimization problems.
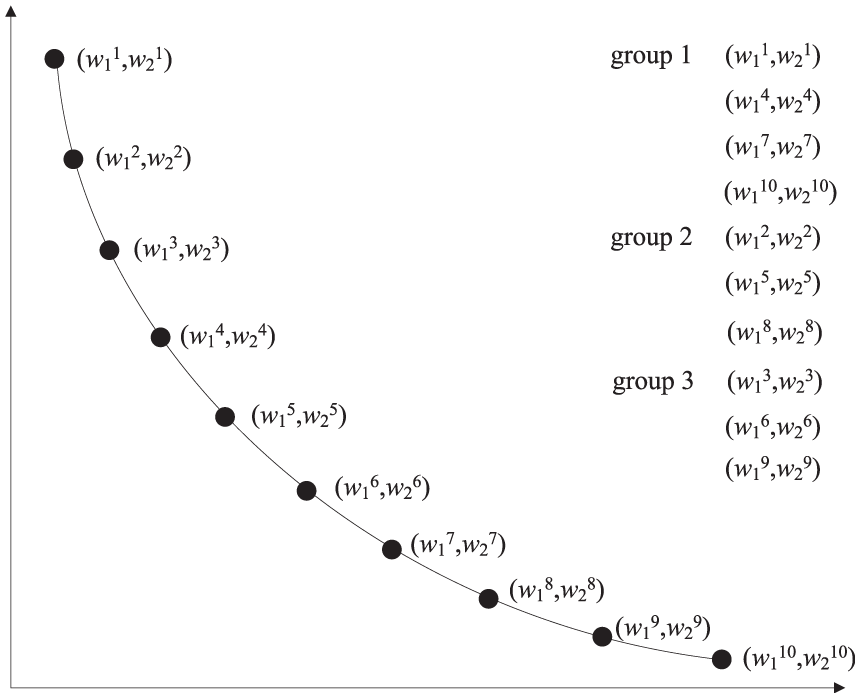
The method of dividing the single objective problems into multiple groups.
Population initialization method
As one of the classical combination optimization problems, an order encoding scheme can represent a feasible and complete scheduling solution. In this study, an order encoding scheme is used, and each individual is defined as a sequence of
Multipopulation construction method
From the above discussion, multiple scalar optimization problems can be constructed by different weight vectors, which will be introduced into the current solved problem set in multiple stages. In order to solve the current solved problem set in parallel, this study proposes an adaptive multipopulation strategy, where multiple subpopulations are constructed for the current solved problems, based on the distribution of population in the objective space and decision space at each iteration. A subpopulation contains the best individual of its scalar optimization problem and similar individuals with this best individual. Therefore, the method of constructing multipopulation can be divided into two steps:
identify the best individuals found for each current solved problem;
select the most similar individuals with the best individuals to construct their corresponding subpopulation.
It is worth noting that each individual only belongs to one subpopulation in the proposed adaptive multipopulation strategy. The method of constructing the multipopulation is shown in Figure 2.

Pseudo-code for constructing the multipopulation.
Due to the characters in the investigated MOFSDSP, the similar degree between two individuals can be measured by the total difference of jobs’ completion time on the last machine, which is shown by equation (13)

where
Genetic operations
In the proposed AMP-MOGA, multiple subpopulations are constructed and evolved to search for the optimal solutions of their corresponding scalar optimization problems in parallel. Each constructed subpopulation would undergo the genetic operations (selection, crossover and mutation) at every generation.
In order to explore the whole of the Pareto front, the information exchange mechanism among the different subpopulations is considered in the selection operation. One of the parent individuals is selected from the current subpopulation, and the other one is selected from the same subpopulation, the other subpopulation or the external archive. After selecting a pair of parent individuals, the order crossover operation is used to produce offspring individuals and the swap mutation scheme is executed upon the offspring individuals.
In order to avoid losing the useful information found in the search process, an external archive is used to store the nondominated solution found. It will be updated by the newly-generated individuals at each generation according to the Pareto rule. If one solution is dominated by any solution in the external archive, it will be discarded. If one solution is nondominated with all the solutions in the external archive, then it will be added to the external archive. If one solution dominates some solutions in the external archive, then it will be added to the external archive and the dominated solutions are deleted. In order to refine and extend the external archive, the genetic operations are also executed to the external archive.
Based on the above description, the framework of the AMP-MOGA in solving the MOFSDSP is shown in Figure 3.
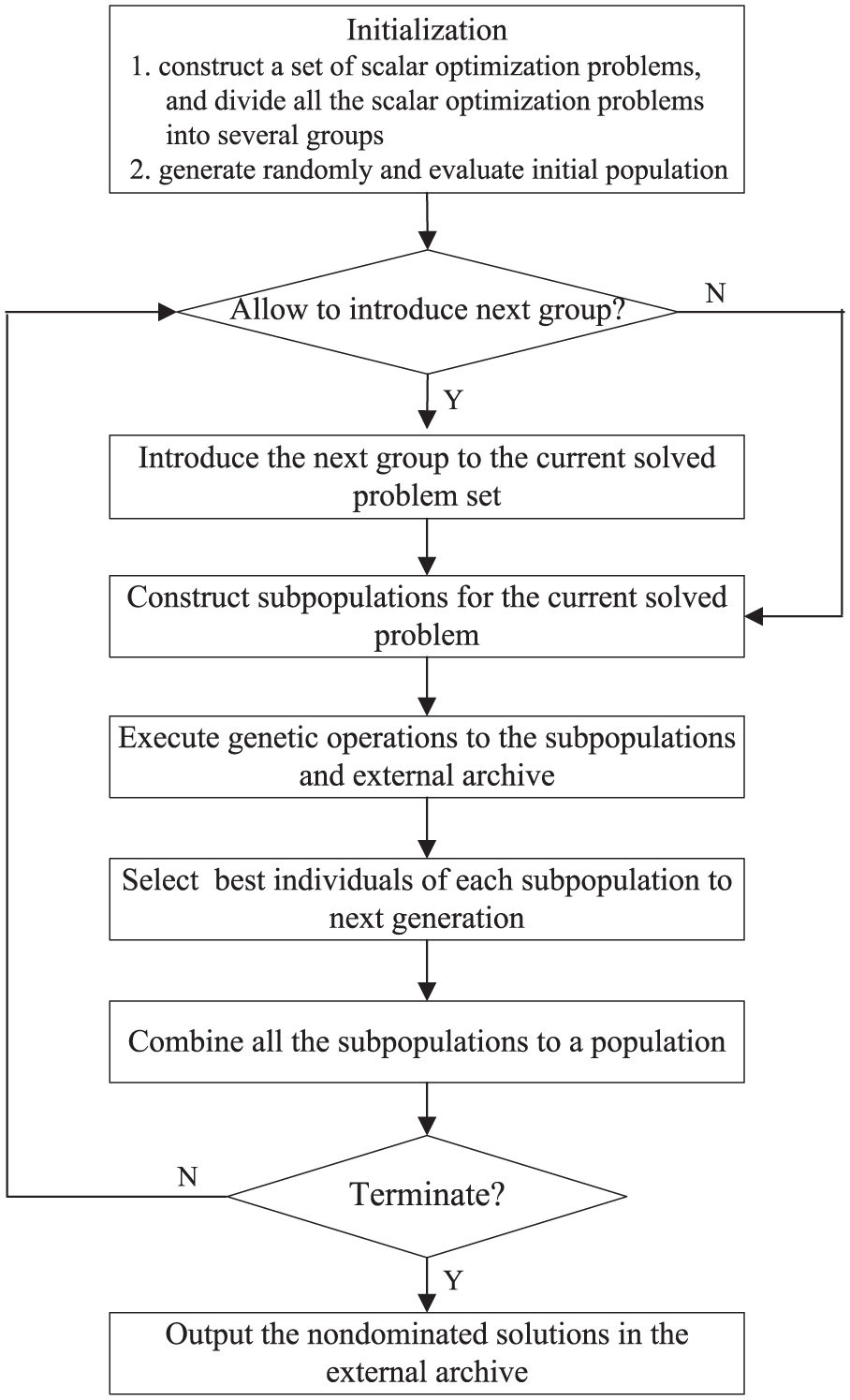
The framework of the AMP-MOGA.
Experimental studies
In this section, the simulation experiments are carried out to examine the performance of the AMP-MOGA in solving the MOFSDSP. Several state-of-the-art algorithms are chosen as the compared algorithms. The involved algorithms include NSGAII which is one of the most classical algorithms, 34 MOEA/D which is the original idea of the AMP-MOGA, 33 and Bi-objective multi-start simulated-annealing (BMSA) which is a novel multiobjective optimization algorithm for solving a multiobjective flow shop scheduling problems. 36
Test instances
Several test instances with different sizes are generated randomly. The number of machines are set to 2, 5 and 10, and the number of jobs are set to 10, 20, 30, 40 and 50, respectively. Therefore, there are in total 15 test instances. The processing times of the jobs on each machine are generated from U[1,20] and the deteriorating coefficient of each job on each machine is generated from U[0,0.3]. The due date of the jobs is generated from U[0,C], where C is the makespan of a solution generated randomly.
Experimental setting
The parameter setting of the AMP-MOGA is as follows. The population size is set to 100. The allowable maximum subpopulation size is set to 10, and the total number of scalar optimization problem is 50. The crossover and mutate probability is set to 1.0 and 0.5, respectively. The total number of function evaluations is taken as the stop condition in all experiments, and it is set to 10,0000. Every 20,000 function evaluations, 10 scalar optimization problems (one group) are introduced. The framework and parameter setting of NSGAII and MOEA/D are referred to in the study by Chang et al., 37 and the parameter setting of BMSA is referred to in its original study.
For all the investigated algorithms for the test problem, 30 independent runs are executed and all experimental results are averaged over 30 runs. In order to compare the experimental results clearly, the
Experimental results and analysis
To have a fair comparison, the following three performance metrics are used to evaluate the performance of the investigated algorithms in our experiments.



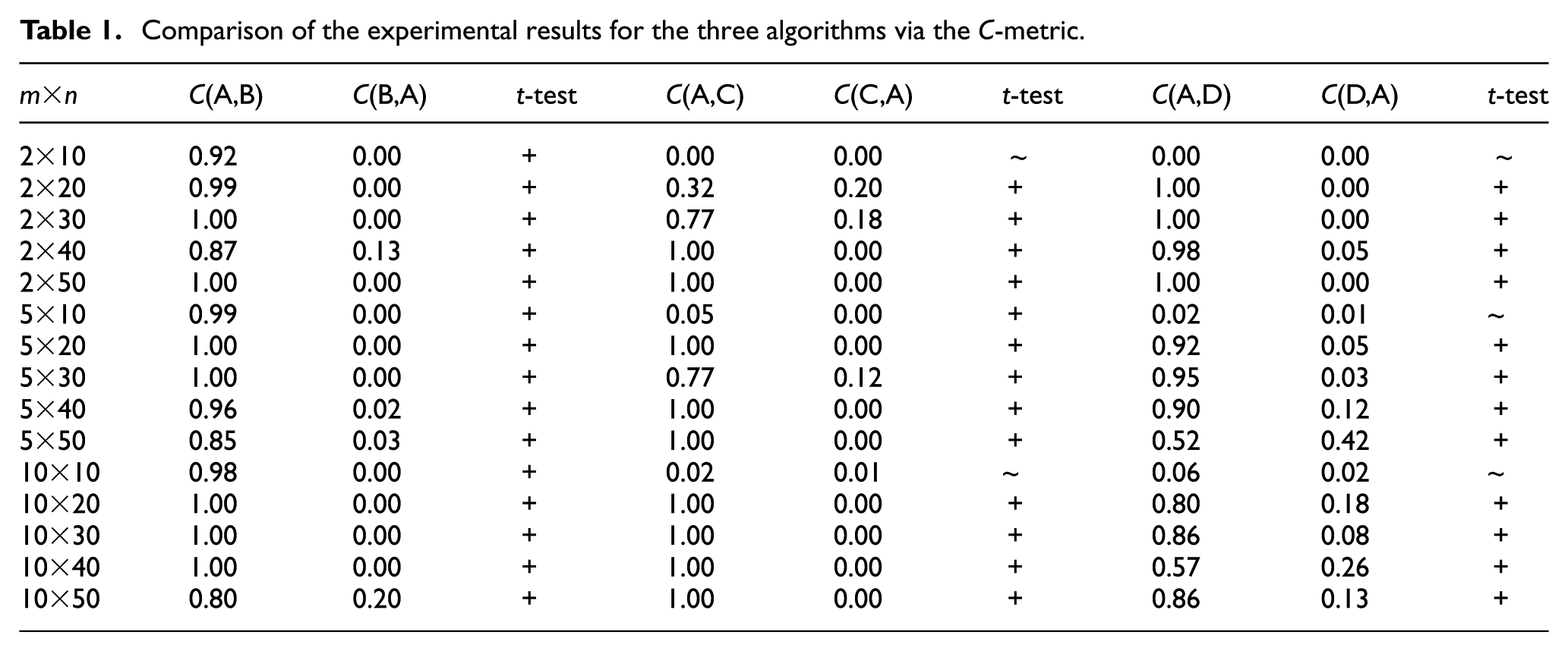
In the following experiments, we will compare the investigated algorithms in the
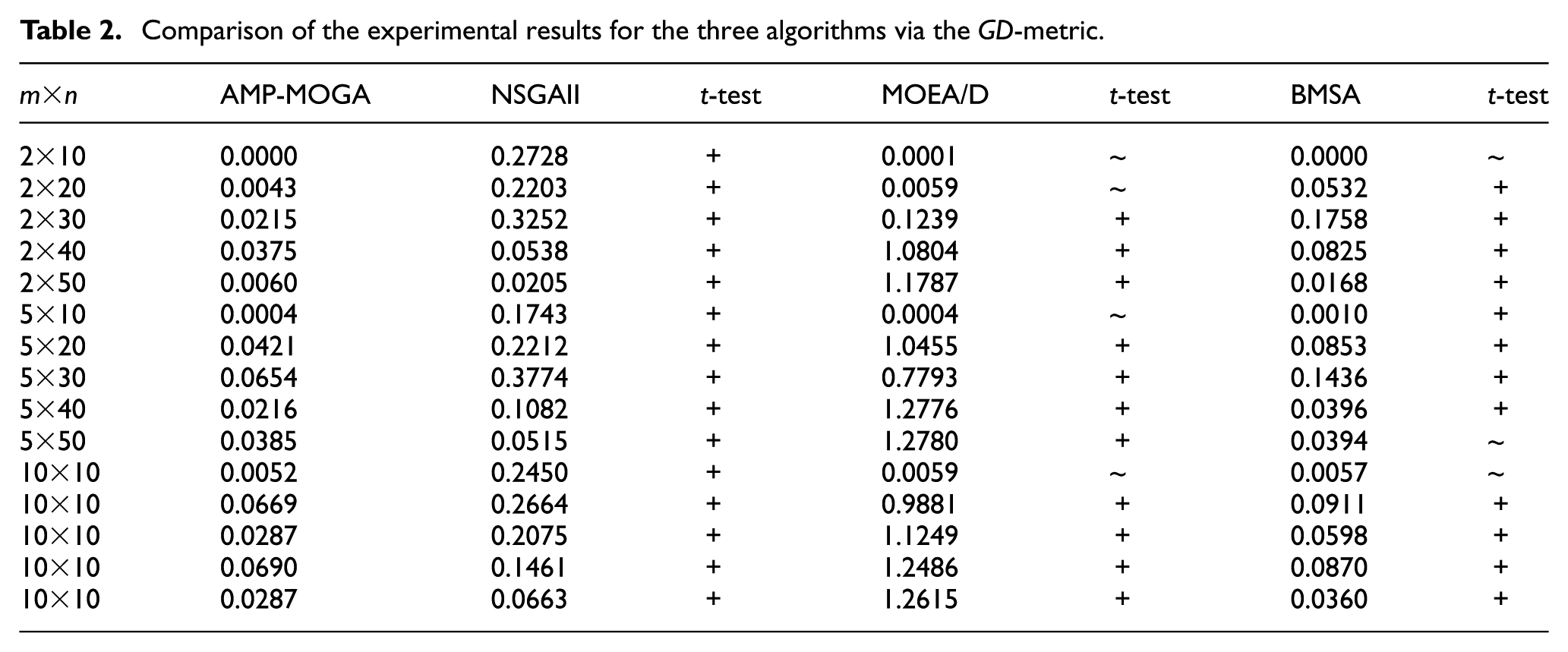
Comparison of the experimental results for the three algorithms via the
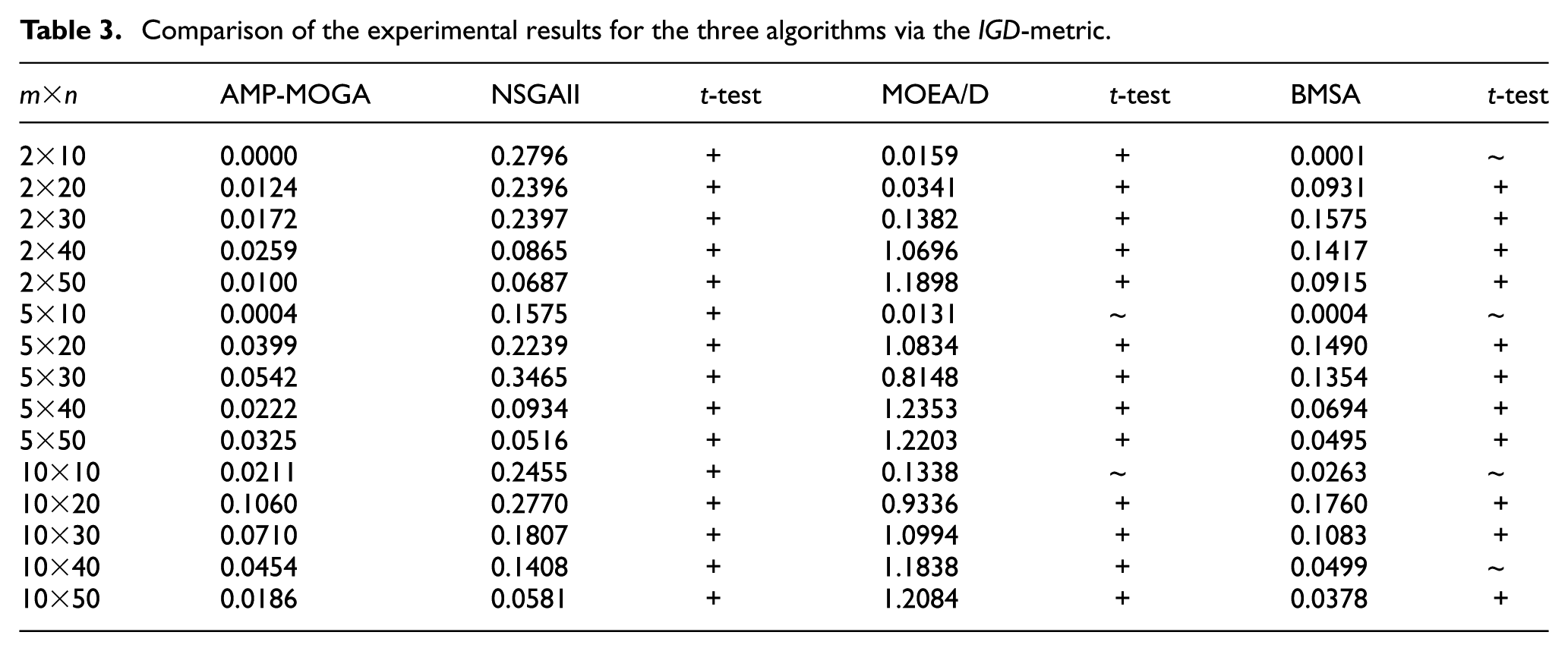
Comparison of the experimental results for the three algorithms via the
Comparison of the experimental results for the three algorithms via the
Firstly, AMP-MOGA always performs better than NSGAII in terms of the three metrics in all the test instances. As shown in Table 1, most values of
Secondly, the AMP-MOGA outperforms MOEA/D significantly in almost all of the test instances, while the AMP-MOGA exhibits the same performance in a few test instances. For example, most values of
Finally, compared with the BMSA, AMP-MOGA also exhibits the superiority in many test instances. The experimental results indicate that the nondominated solutions obtained by the AMP-MOGA can dominate almost all of the solutions obtained by BMSA, and they are much closer to the Pareto front and even the distribution.
In order to illustrate the nondominated solution obtained by the investigated algorithm, two instances are chosen to show the nondominated solution sets obtained by the proposed algorithm and the compared algorithms in Figures 4 and 5. Compared to the compared algorithms, the proposed algorithm can get the nondominated solution set with better approximation and more uniform distribution.
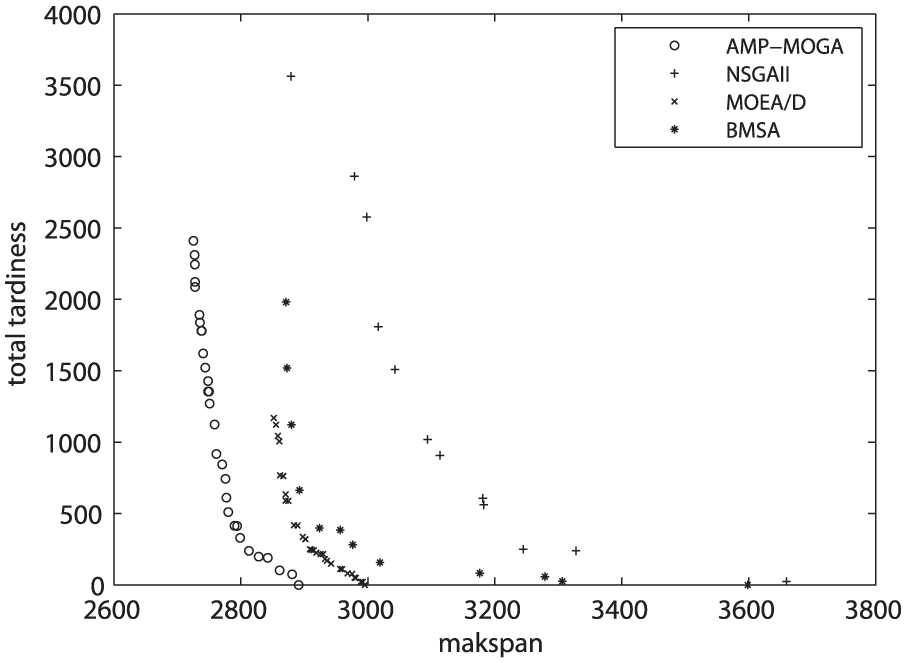
Nondominated solutions obtained by the different algorithms for
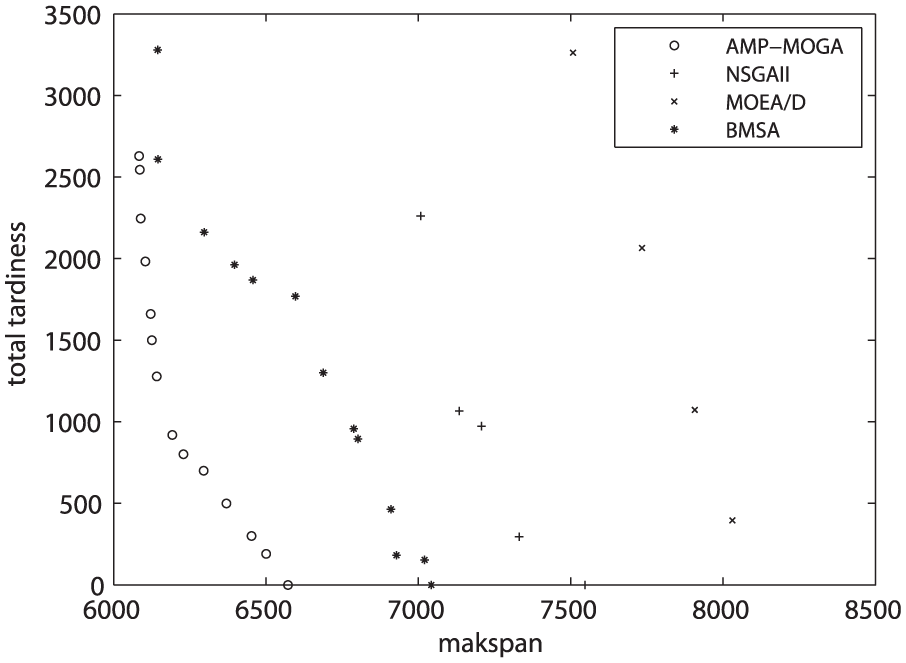
Nondominated solutions obtained by the different algorithms for
Conclusion and future research
This work addresses a general MOFSDSP for the first time, and its goal is to minimize the makespan and the total tardiness simultaneously. In order to solve it, an AMP-MOGA is proposed. Simulation experiments are carried out on some stochastic instances, and the experimental results show that the proposed algorithm can solve the model effectively and efficiently, and can generate an approximated Pareto solution set of a general multiobjective flow shop deteriorating scheduling problem. The proposed algorithm can be used to guide decision makers in making better decisions when the deteriorating effect occurs in a general flow shop, and it can provide a new method to find a good scheduling decision.
For the future work, it is straightforward to research a more complicated and realistic deteriorating scheduling problem, e.g. the hybrid flow shop deterioration scheduling problem. It is also necessary to investigate the uncertainty in the the flow shop deteriorating scheduling problem because the uncertainty usually appears in the manufacturing systems,41,42 e.g. the machine breakdown, job rework and undetermined processing time.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Science Foundation for Distinguished Young Scholars of China (grant numbers 71325002, 61225012); the Major International Joint Research Project of NSFC (grant number 71620107003); the National Nature Science Foundation of China (grant numbers 71671032, 61525302, 61590922); the Fundamental Research Funds for the Central Universities (grant number N160402002); Shandong Provincial Natural Science Foundation, China (grant number ZR2016FP02), Qingdao Postdoctoral Research Project (grant number 2016027).