
Abstract
In this article, an adaptive proportional–integral–derivative–type neural network constrained control method based on radial basis function neural network model identifier is presented for automatic parking system. In the design process of the control method, the parameters of proportional–integral–derivative–type neural network controller can be adjusted online using the Jacobian information (the sensitivity of system output with respect to its input) of the controlled system. In this way, the proposed method will have a better adaptability. Meanwhile, we design a novel dynamic anti-windup compensation unit to solve the magnitude saturation and rate constraint problems of automatic parking system. The stability analysis based on Lyapunov function is given to prove the convergence of the proposed control algorithm. The final simulation results for automatic parking system show the effectiveness of the proposed method.
Introduction
Automatic parking system is a kind of intelligent parking assist system, which can make the vehicle automatically enter the parking space quickly and safely. It can identify the parking space by the ultrasonic sensor.1,2 Then, the automatic parking system generates the corresponding parking trajectory according to the relative position of the vehicle and the parking space. Finally, automatic parking controller automatically adjusts the steering wheel to complete the parking process. 3
Compared with the manual parking process, automatic parking system has the advantages of simple operation, short parking time, and high safety. It successfully improves the intelligent level of the vehicle.4–6 In our daily life, the quantity of four-wheeled vehicles is reaching very large numbers. It causes the serious parking problems. Therefore, there are a lot of researches on automatic parking system.
In Liang et al., 7 a fuzzy control scheme is designed by adopting the fuzzy rules from the experience of driver parking. Its experimental results verify the feasibility of the scheme for automatic parking system. In Yang et al., 8 the variable universe adaptive fuzzy control scheme is proposed for automatic truck parking system. The authors verified the applicability of the proposed scheme through the simulation experiments. In Lin et al., 9 the automatic parking system is designed on the basis of multi-dimension fuzzy controllers. The proposed control scheme has good simulation results. However, the control rule base of fuzzy control scheme is complicated which can cause the redundancy between the rules. The kinematic model of vehicle can be established according to the distribution of parking space. Then, the automatic parking path tracking controller is designed to complete the tracking of the parking path. 10 A self-organizing adaptive algorithm is proposed in Huang and Lin 11 and Huang and Lee, 12 which can make the automatic parking system have better robustness according to the simulation results. But there are some difficulties to put the simulation into practice. In Hou et al. 13 and Yan et al., 14 a model-free adaptive control (MFAC) algorithm is proposed for automatic car parking system. In the design process of the MFAC method, the model information of vehicle is not required to know which makes the proposed algorithm have a good adaptability to different types of vehicles. And the MFAC algorithm for automatic parking process is verified by the simulation experiment.
Neural network has strong ability of nonlinear fitting, self learning, and memory. At present, it has been applied in many fields due to the high robustness, such as signal processing, medicine, control system, pattern recognition, speech recognition, and much more areas. In Yang et al., 22 the adaptive radial basis function (RBF) neural network–enhanced controller is designed for the Baxter robot to achieve good control performance at dynamic level. Moreover, the authors improve the adaptive neural network by adopting the error transformation technique. And the proposed neural network control method has been verified by comparative experiments. In Yang et al., 23 the authors propose a novel neural control method by introducing the switching mechanism into the adaptive neural network controller to guarantee the global stability of closed-loop system. Moreover, the experiments on a robot show the effectiveness of proposed neural controller. Many theory analysis and applications verify the superiority of the neural network.15–18,24
In this article, we propose an adaptive proportional–integral–derivative (PID)-type neural network constrained control method based on RBF for automatic parking system. The Jacobian information obtained from the results of RBF online identification can be used to adjust the parameters of PID-type neural network controller adaptively. In order to solve the problems of magnitude saturation and rate constraint, we design a dynamic anti-windup compensation unit to keep the control input in a safe range. After dynamic compensation, the control input is also consistent with the actual situation in automatic parking process. Finally, the simulation results for automatic parking system are given to verify the effectiveness of the proposed adaptive constrained control method.
Automatic parking process problem description
There are three types of parking in our daily life (refer to Figure 1), including parallel parking, vertical parking, and oblique parking. This article focuses on the research of parallel parking system because the parallel parking is the most common situation. 19
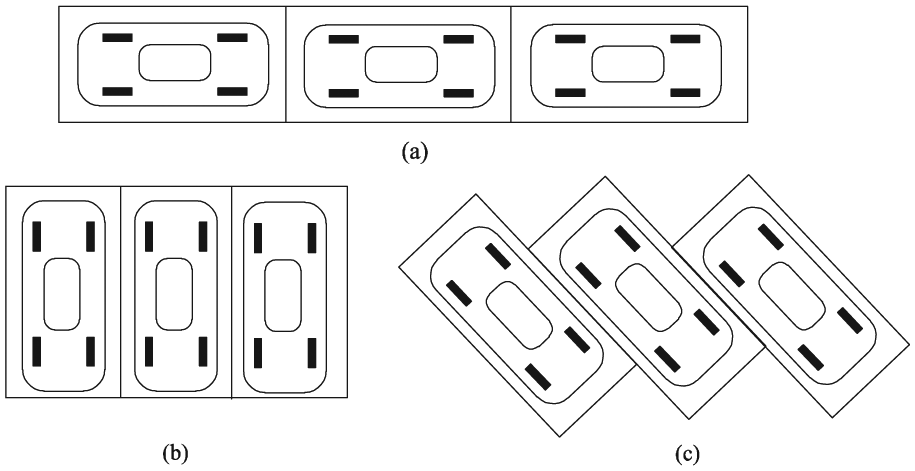
Types of parking: (a) parallel parking, (b) vertical parking, and (c) oblique parking.
Parking space detecting
The precondition of vehicle automatic parking is the detection of the parking space. In general, the automatic parking space detecting system is mainly composed of the ultrasonic sensors which are arranged on the side of the vehicle body. Here, we show the schematic diagram of the detecting process of parallel parking space as Figure 2. There are vehicles parked in the front and rear of the parking space. When the vehicle is moving forward for searching the parking space, the distance information can be detected by the ultrasonic sensor. If the sensor passes through the edge of vehicle body, the distance that detected by the sensor will change from

Detecting process of parallel parking space.
Path planning
Path planning is one of the main strategies for automatic parking system. Based on the known parameters such as

Path planning of parallel automatic parking process.
From the figure, we obtain the coordinates of



where
Kinematic model of four-wheeled vehicle
The four-wheeled vehicle model is shown in Figure 4. Generally, in the process of backing the car, the vehicle velocity is lower than 5 km/h, which ensures that the sideslip does not occur. Based on this precondition, we can obtain the kinematic model of four-wheeled vehicle as follows 20

in which

in which
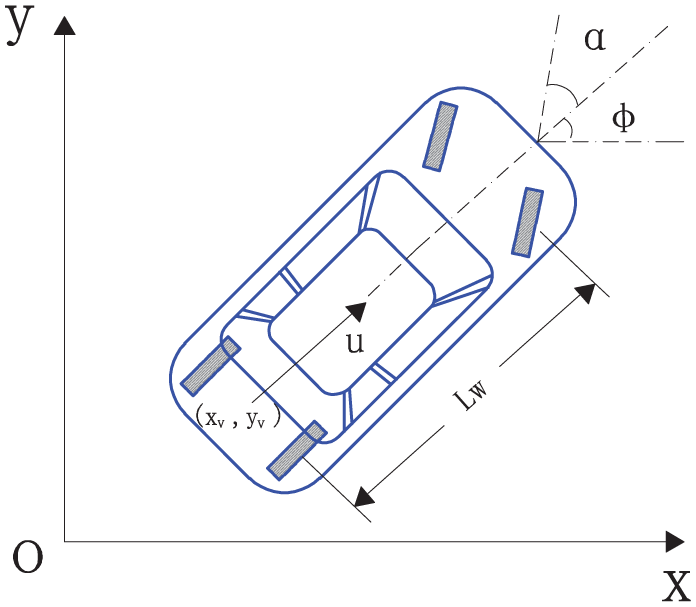
Four-wheeled vehicle model.
In the actual parking process, the control input

Main results
In this section, we propose an adaptive neural network constrained control algorithm based on RBF for automatic parking system. Main contributions consist of three parts: (1) RBF neural network for automatic parking identification, (2) put forward an adaptive PID-type neural network constrained control method via anti-windup scheme, and (3) stability analysis of PID neural network based on Lyapunov function.
RBF neural network for identification
RBF neural network is a kind of three-layer feedforward network which has the advantage of fast learning speed. It can avoid local minimum problem because the mapping of the hidden layer space to the output layer space is linear. The RBF network structure is shown in Figure 5.

The structure of RBF neural network.
In the structure of RBF network,

in which

Define the performance index function of identification network as

We obtain the iterative algorithms of output weight vectors, node base width parameters, and node center using the gradient descent method





where

Adaptive PID-type neural network constrained controller design
We choose the algorithm of the typical PID controller as follows

where

where
Consider the three-phase inputs of PID controller are

Therefore, the PID controller can be rewritten as follows
where
In order to ensure that the control input of automatic parking system is maintained in an acceptable range, we design an adaptive constrained controller as follows according to the constraint conditions (6)
where

We define the output of the first layer of the neural network and the output of the controller, respectively, as follows

where

Therefore, we can get the derivative of above equation

In order to obtain the parameters updating law of PID neural network, we define the performance index function as follows

Then, the parameters of PID neural network can be adjusted by adopting the gradient descent method, and adjustment rules are as follows

where
Stability analysis of PID-type neural network
In view of equation (26), we can obtain

where parameter
Theorem
Define

The tracking error convergence can be guaranteed.
Proof
The discrete time Lyapunov function is defined as follows

Then, equation (29) can be transformed into the following form
where

In view of

Finally, we obtain
To show a clear idea of the proposed adaptive neural network constrained control method based on RBF model identifier design procedures, we give a block diagram in Figure 6.

The block diagram of proposed scheme design procedures.
Simulation results
In this section, the simulation of automatic parking process is given to verify the effectiveness of the proposed adaptive neural network constrained control algorithm. The basic parameters (refer to Table 1) of parking space and Mercedes-Benz E-400 are selected for the simulation study.
Basic parameters of Mercedes-Benz E-400.

As for the model identifier, six basis functions are used in RBF neural network. We choose the momentum factor and learning rate as



The initial values of PID-type neural network parameters

The response curves of PID-type neural network controller parameters and weight parameters estimation are shown in Figures 7 and 8, respectively. From Figures 7 and 8, we observe that the proposed method can tune the coefficients of PID-type controller adaptively to obtain good control effect. The Jacobian information of the controlled system and the anti-windup compensation signal

Response curves of PID parameters.
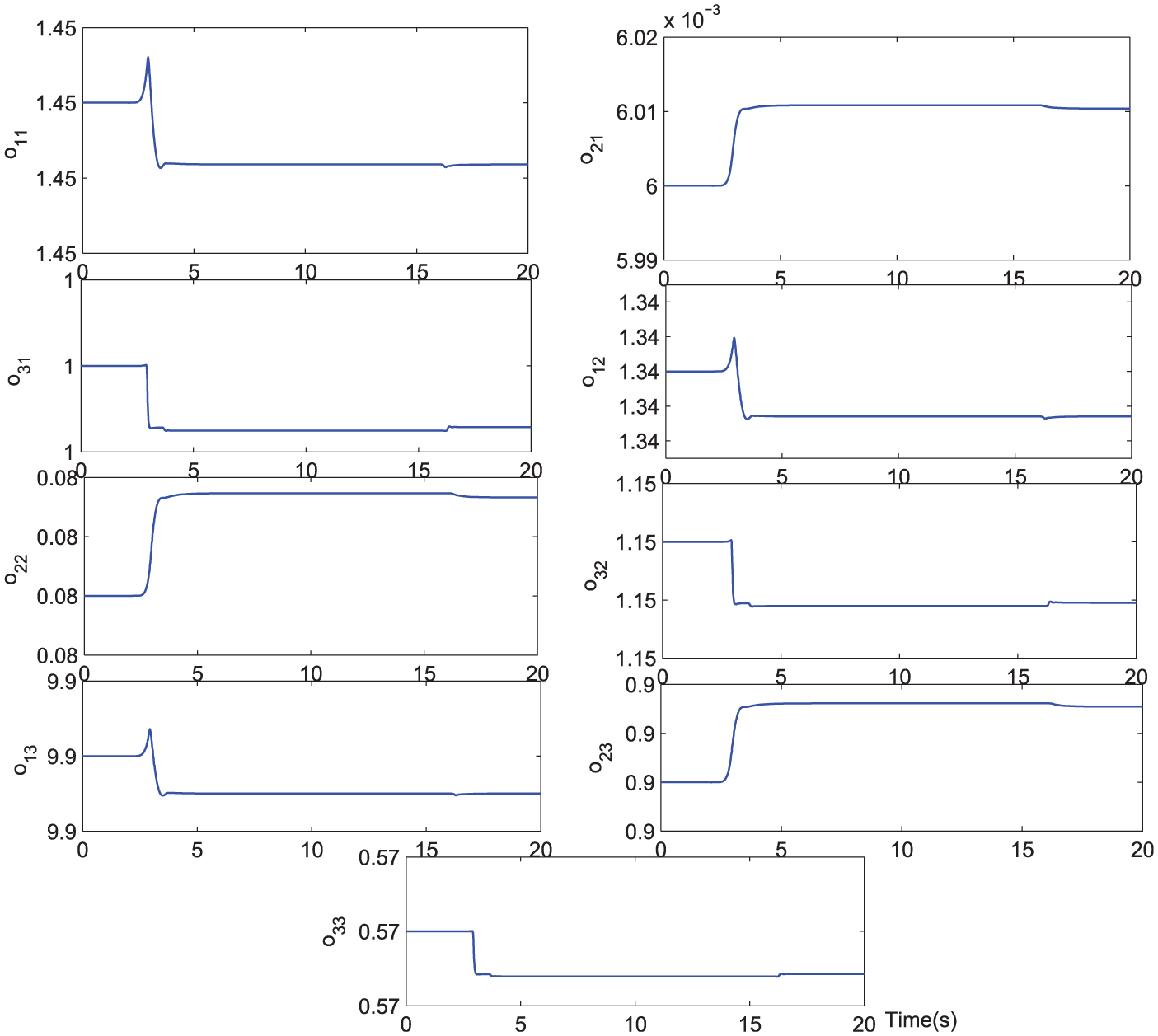
Response curves of weight parameters estimation.
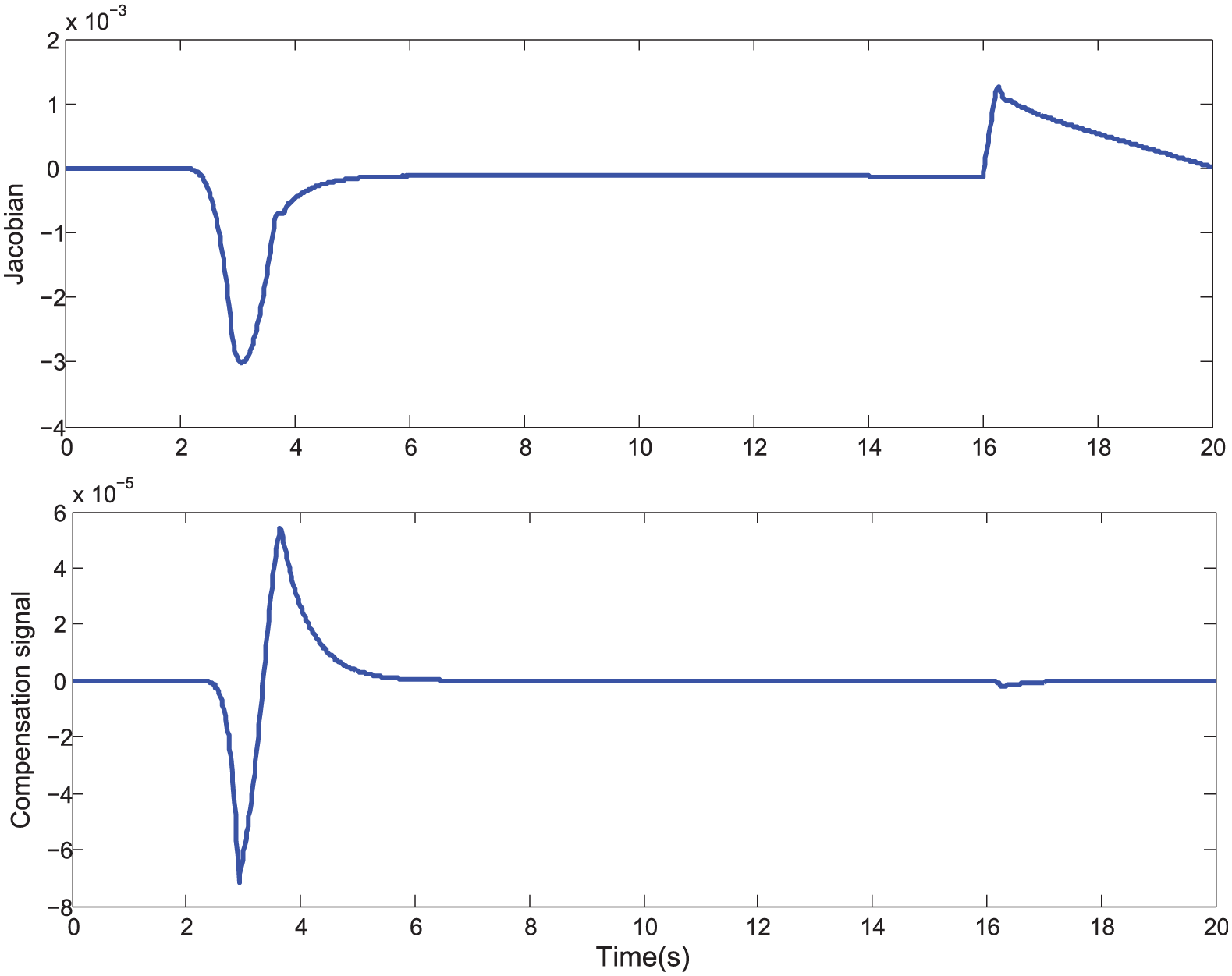
Jacobian information and compensation signal
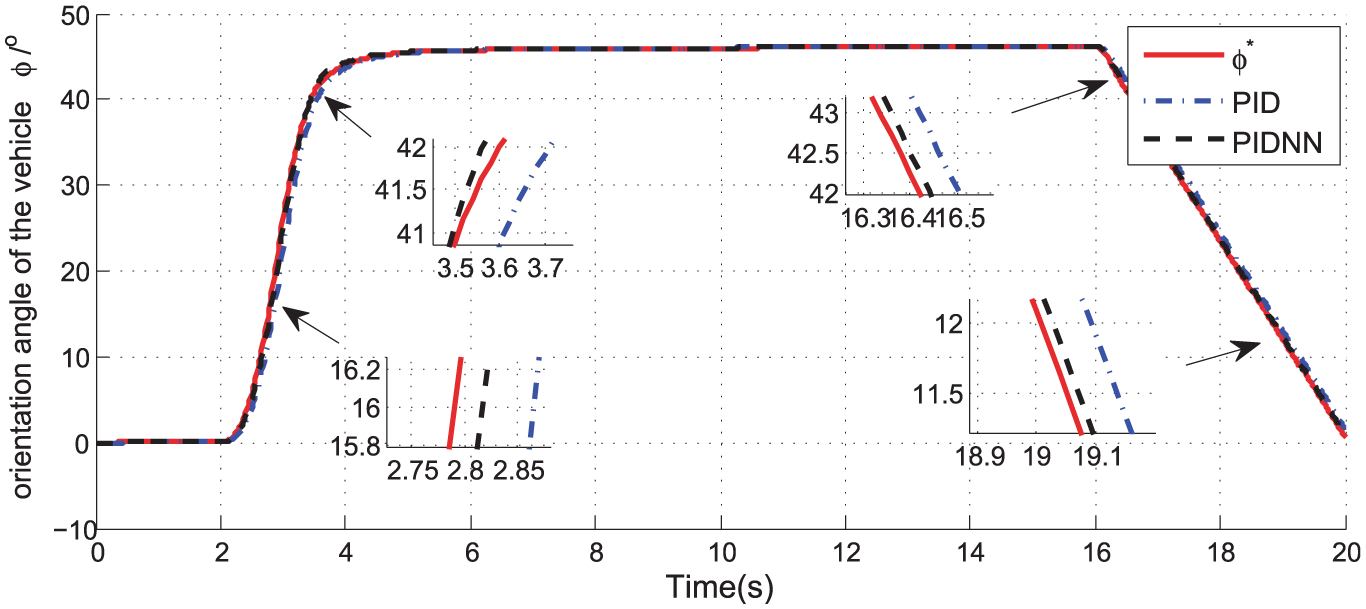
The orientation angle of the vehicle.

The steering angle of the automatic parking process.
Conclusion
In this article, an adaptive PID-type neural network constrained control method based on RBF model identifier is proposed for automatic parking system. The proposed method realizes the online identification of the automatic parking kinematic model by adopting the RBF neural network. Then, the Jacobian information of controlled system can be obtained for online parameters adjustment of the PID neural network controller. In order to solve the problems of magnitude saturation and rate constraint for automatic parking system, we design a dynamic anti-windup compensation unit to keep the control input in a safe range. Theoretically, the proposed method has good control performance due to the characteristic of inherently nonlinear time-varying. And it deserves to be mentioned that the proposed control method for automatic parking system is particularly effective in the case of inaccurate system model. The final simulation results have proved the better control effect and superiority of the proposed method. In the future work, the adaptive constrained nonlinear control approach for multi-input multi-output (MIMO) nonlinear system is the focus of our research.
Footnotes
Acknowledgements
The authors sincerely thank the editor and all the anonymous reviewers for their valuable comments and suggestions.
Academic Editor: Chenguang Yang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (61503156, 61403161, and 51405198) and the Fundamental Research Funds for the Central Universities (JUSRP11562, JUSRP51406A, NJ20150011) and National Key Research and Development Program (2016YFD0400300) and the Science and Technology Funds for Jiangsu China (BY2015019-24).