
Abstract
In this article, a novel data-driven constrained control scheme is proposed for automatic parking systems. The design of the proposed scheme only depends on the steering angle and the orientation angle of the car, and it does not involve any model information of the car. Therefore, the proposed scheme-based automatic parking system is applicable to different kinds of cars. In order to further reduce the desired trajectory coordinate tracking errors, a coordinates compensation algorithm is also proposed. In the design procedure of the controller, a novel dynamic anti-windup compensator is used to deal with the change magnitude and rate saturations of automatic parking control input. It is theoretically proven that all the signals in the closed-loop system are uniformly ultimately bounded based on Lyapunov stability analysis method. Finally, a simulation comparison among the proposed scheme with coordinates compensation and Proportion Integration Differentiation (PID) control algorithm is given. It is shown that the proposed scheme with coordinates compensation has smaller tracking errors and more rapid responses than PID scheme.
Keywords
Introduction
Nowadays, with the fast development of science and technology and increase of people’s living standard, the number of cars is increasing very fast. The space of car parking significantly reduced, and traffic accidents are particularly prone to happen when backing the car for these drivers who have less experience. The university of Michigan study shows that manual parking is one of the important reasons why the driver is easy to cause the traffic accident. 1 Thus, the automatic parking problem has become a hot research topic.
Automatic parking system can avoid parking accident. It uses the sensor technology, computer technology, and automatic control technology to accurately perceive the parking environment and planning a optimal parking path and then lead the vehicle to the target by controlling the vehicle automatically complete the path tracking. 2 Parking types include parallel parking, vertical parking, and oblique parking, as shown in Figure 1. Parallel parking is most common in our daily life, so the parallel automatic parking system has become a hot spot of current research. 3,4 Therefore, the work of this article is to study the parallel parking.
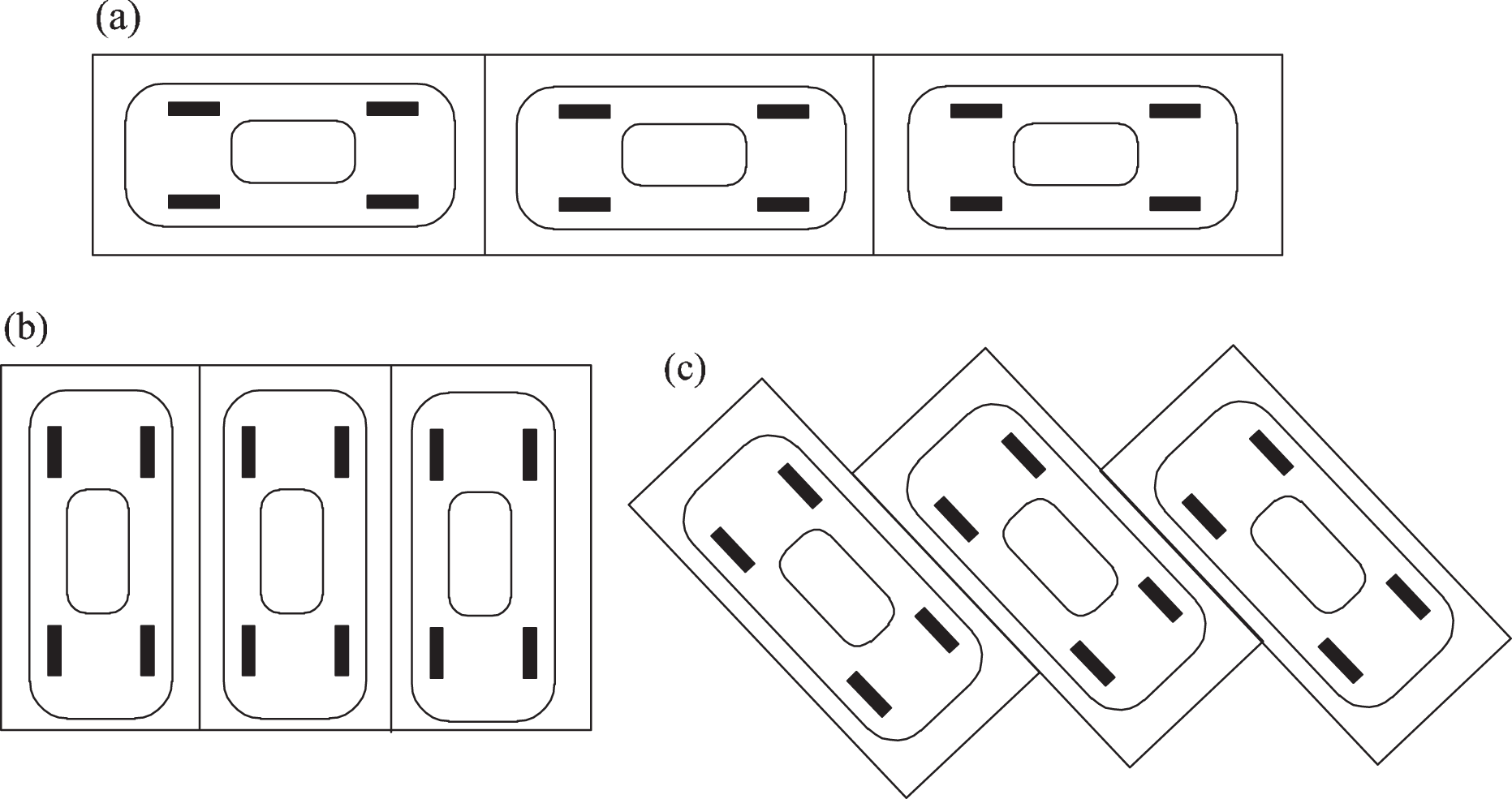
Classification of parking: (a) parallel parking, (b) vertical parking, and oblique parking.
Parallel parking consists of three procedures 5 : (1) parking space detection, (2) path planning, and (3) path tracking. Once drivers choose the automatic parking mode, the width and length of the parking space are detected by ultrasonic sensors mounted on the side of the car. When the drivers stop a car at the beginning position, environmental geometry and target position are calculated automatically from the sensor information. Then, a target parking trajectory is created by the automatic parking controller and the car is guided into the target parking space by controlling the electronic power steering. 6
Four-wheeled vehicle is the most commonly used in our daily life. Its dynamics model can be transformated into nonholonomic chained system, 7 and the corresponding control algorithm can be designed based on the nonholonomic chained system. But the automatic parking process has the characteristics of nonlinearity, time variation, multivariable, and so on. It is difficult to establish an accurate model of the nonholonomic chained system. Even if the model is established, the corresponding control algorithm is very complex and the computation is very large. So it is difficult to popularize this method. In the study by Chen et al., 8 the fuzzy-Proportion Integration Differentiation (PID) controller is designed for automatic car parking system, the front wheel angle is the output of the controller, and the speed error is the input of the controller. In the study by Liang et al., 9 the automatic parking system is designed based on the fuzzy controller by adopting fuzzy control algorithm. The vehicle coordinate position error and the orientation angle of the car error are the output of the controller, and the front wheel angle is the input of the controller. Different fuzzy logic controllers are designed for different parking situations in the study by Li et al., 10 and the experimental verification is done on the car robot that on the basis of field programmable gate array. In the study by Baturone et al., 11 the fuzzy controller is designed by adopting the position coordinate of the car, the direction of the vehicle body, vehicle speed, and trajectory curvature as inputs, and the marching direction, vehicle speed, and the target curvature size as outputs. The experiment is done on a car robot. In the study by Heinen et al., 12 the authors proposed a control method based on neural network by adopting the position coordinate of the car, the orientation angle of the car as the input of artificial neural network, and the vehicle speed and the front wheel angle as the output of artificial neural network. The authors realized the virtual process of automatic parking in the simulation software. But there are many types of cars on the market. For each new type of the car, the parameters of PID controller need to be adjusted, the fuzzy control rules should be reformulated, and the neural network control need to be retrained. Hence, the automatic parking system established by the above algorithm is poor in portability.
The data-driven control methods have been applied in several fields. 13 –16 Model-free adaptive control (MFAC), one of the data-driven control methods, was put forward by Hou. In MFAC, combined with a innovative concept named pseudo partial derivative (PPD), an equivalent dynamic linearization data model is developed. First, it takes the place of the general discrete time nonlinear system at each current operating point. Next, the estimation of PPD is only conducted online through the input/output (I/O) data from the controlled system. Eventually, the controller is designed. At present, the MFAC method has been successfully applied in the fields of smart grid, chemical industry, welding process, wind power generation, urban expressway, artificial heart rate regulation, and so on. 17 –23 Theoretical analysis, simulation, and practical application show that the MFAC method is simple and practical, small computational burden, and strong robustness; it can deal with the control problem of unknown nonlinear time-varying systems. 24
In this article, we propose a novel data-driven constrained control scheme with coordinates compensation for automatic parking system. The proposed scheme consists of constrained control algorithm, parameter estimation algorithm, parameter reset algorithm, and coordinates compensation algorithm. The design of the control scheme is only based on the I/O data of the automatic parking system, which does not include the vehicle model information. Therefore, the proposed scheme is applicable to different vehicle types. The proposed scheme gets a better control effect by adopting the coordinates compensation algorithm. Because the control input is subject to change magnitude and rate constraints, a novel dynamic anti-windup compensator is used to deal with the saturation problem. The simulation results have verified the superiority of the proposed constrained control scheme.
Problem formulation for automatic parking process
Parking space detection
The diagram of parking space detection is shown in Figure 2. There are ultrasonic probes on the vehicle. The ultrasonic probes in the front and rear of the vehicle are used to ensure parking safety. The ultrasonic probes mounted on the side of the vehicle are used to detect the parking space. Start the automatic parking system when the vehicle is ready to pull over, and the system detects the distance information by the ultrasonic probes mounted on the side of the vehicle . If there is a vehicle parked at the roadside, the distance detected by the ultrasonic probe mounted on the right side of the vehicle is d1, otherwise, the detection distance is d2. If there is a parking space, we can get the dashed-dotted line pulse as shown in Figure 2. According to the vehicle speed and pulse duration, the length of parking spaces Lp can be obtained. If Lp is greater than the minimal available length of parking space L p min, the parking space is identified as available. Otherwise, the vehicle will continue to move forward to find other available parking spaces. After finding the available parking spaces, the systems enter the stage of path planning.

Diagram of parking space detection.
Path planning
The path planning of parallel parking consists of the following procedures. The given parameters are the vehicle width Wc, the vehicle length Lc, and the length of parking space Lp (refer to Figure 3). Make a circle O1 at the center of (0, R1) and with a radius of R1. This circle is tangent to the x-axis at the origin O. Make a circle O2 at the center of the corner O2 and with a radius of


Path planning of automatic parking.
where ΔS is the safe distance between the two cars.
Draw the common tangent
From this diagram, the angle α of line



where d is the lateral distance between the two vehicles as shown in Figure 3.
Based on Figure 3, the minimal length of parking space

where

Path tracking
Let us consider the four-wheeled car shown in Figure 4. Obey the assumption that sideslip does not happen, the state space equation of four-wheeled car
25,26
is obtained as


Vehicle model.
where (x, y) is the coordinate of the center of the rear wheel axle, L denotes the wheel base, θ is the orientation angle of the car, and v and β are the vehicle speed and the steering angle, respectively.
In the practical application, equation (7) is usually transformed into the following discrete model

where T denotes sampling time.
In addition, the input β(k) of the vehicle cannot change too fast within a small time interval. So the control input is subject to change magnitude and rate constraints as following

Based on the state space equation of four-wheeled car, the coordinate of the car (x,y) is determined by the orientation angle θ of the car with little change in the parking speed. Therefore, ensure the coincidence of the coordinate of the car and target trajectory by controlling the steering angle β to control the orientation angle θ of the car is the control objective of automatic parking system.
Main results
In this section, we will put forward a novel data-driven constrained control scheme with coordinates compensation for automatic car parking system. Major contributions in the following works are (1) an unknown PPD estimation algorithm, (2) proposed a data-driven constrained control algorithm via anti-windup scheme, and (3) the coordinates compensation algorithm of the target orientation angle of the car.
PPD parameter estimation algorithm
First of all, the nonlinear system of automatic parking can be transformed into the following dynamic linearization data model

where θ and β are defined as the orientation angle of the car and the steering angle, respectively. Parameters ϕ1 and ϕ2 are called PPD.

where

where
Therefore, by taking into account equations (11) and (12), the estimation dynamic error of output can be given by

where

The gain

where μ is a positive constant; hence,

In view of equations (13) and (14) and condition

where H is given by

and I2 denotes the
Theorem 1
The equilibrium
Proof
Consider the Lyapunov function

where λ and P are positive constants and P is calculated by

where

Noticed that
In order to make the parameter estimation, law (14) have a stronger capability in tracking time-varying parameter, a reset algorithm which 13 should be considered is as follows

where ς is a small positive constant and
A data-driven constrained control algorithm and stability analysis
On the basis of the observer (12), the data-driven unconstrained control algorithm is computed as

where

where T denotes the sampling time, and
Because of the dynamic constraints in the close-loop control system, an anti-windup compensator is designed to adapt to the target orientation angle of the car

where κ lies in unit circle. Therefore, the controller (19) can be redescribed as

Observer tracking error is defined as
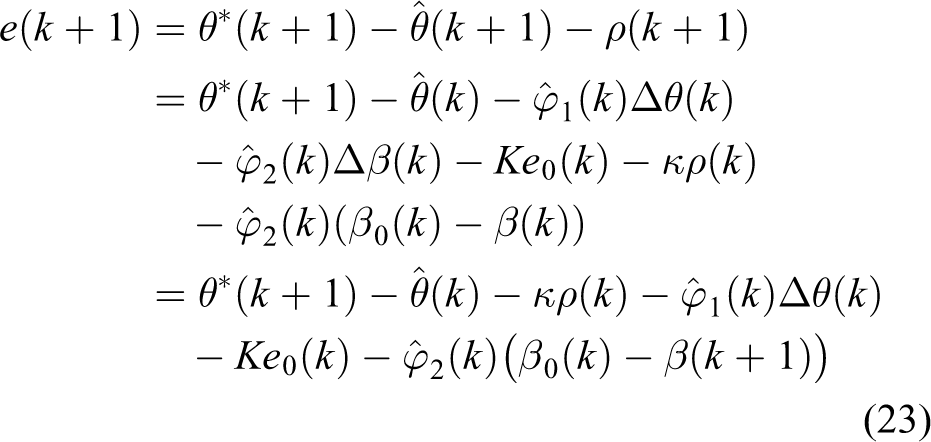
Substituting equation (22) into equation (23), we obtain

The convergence and tracking performance analysis for data-driven constrained control law (20) and (22) are shown in theorem 2.
Theorem 2
For given
where

Proof
Considering the absolute value of equation (24), it turns into

Considering a Lyapunov function as

Since
Corollary
Based on the controller (20) and (22), together with the observer (12) and adaptive laws (14), we can ensure that the system tracking error
Proof
Since

Considering the absolute value and limiting on both sides of eqaution (26), we obtain

Hence the tracking error
The controller (22) can be divided into two parts: feedback control and feedforward control, which is described as

where
Feedback control:

Feedforward control:
Hence, we obtain the novel data-driven constrained control scheme of automatic parking system that consists of eqautions (14), (18), (20), and (22).
The compensation algorithm of the target orientation angle of the car
In the actual control process, there often exists tracking error between the actual orientation angle of the car and the target orientation angle of the car. Hence, there will exist steady-state error between the actual parking trajectory and the target trajectory. In order to eliminate the steady-state error, we will propose a coordinates compensation algorithm for automatic car parking systems. The data-driven constrained controller corrects the steering angle according to the difference between the target orientation angle of the car and the current orientation angle of the car.
The compensation theory of the target orientation angle of the car is shown in Figure 5. Backing a car from point E to point F. The solid curve EF denotes the target trajectory and the dashed-dotted line EP(k) denotes the actual parking trajectory. Point P(k) and point

The compensation theory of the target orientation angle of the car.
From Figure 5, we know that the actual position of car has separated from the target trajectory. Hence, we propose the compensation algorithm of the target orientation angle of the car as the following

where ψ is a positive adjustable parameter, used to adjust the intensity of compensation.

where
Hence, we obtain the novel data-driven constrained control algorithm with coordinates compensation as the following






In order to give a clear idea of the comprehensive proposed novel data-driven constrained control system design procedure for automatic parking, we provide a flowchart as shown in Figure 6.
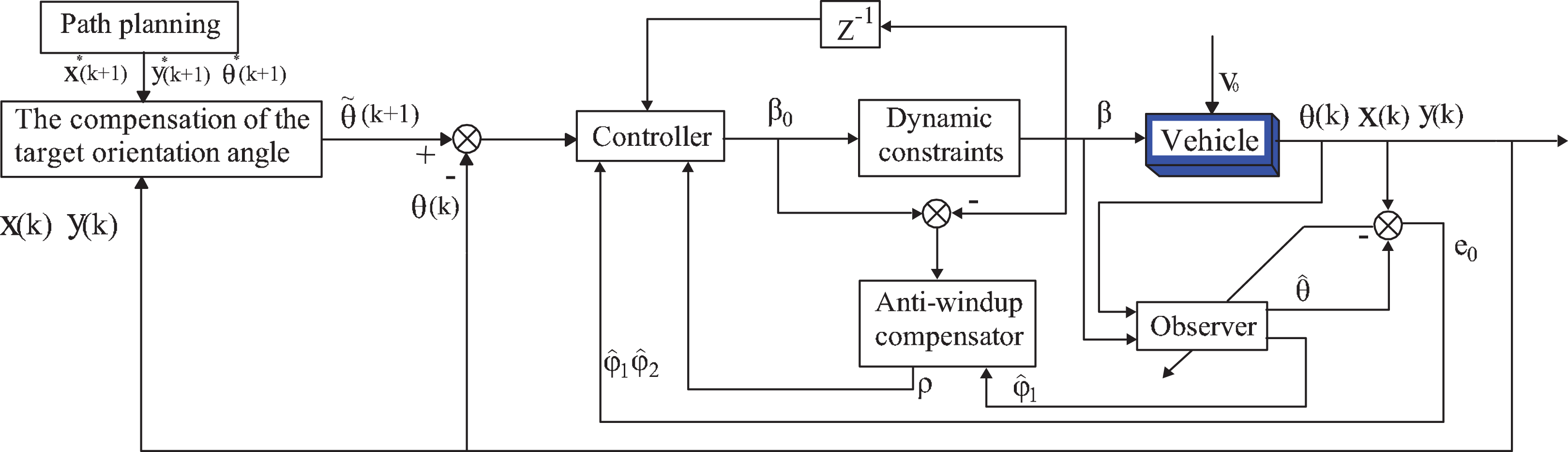
Flowchart of the novel data-driven constrained control system design procedure for automatic parking.
Simulation results
In order to verify the superiority of the novel data-driven constrained control scheme with coordinates compensation, a simulation comparison among the proposed constrained control scheme with coordinates compensation and PID control scheme is given for different two cars with constant parking speed. PID controller adopts the position control algorithm as the following

where
Here, we choose the optimal PID parameters by taking into account the two car models, after repeated simulation test, and considering the principle of rapidity and small overshoot. Parameter settings of the two algorithms are
The simulation consists of two parts: (1) automatic parking simulation of FAW Volkswagen CC (FAW-VW CC) and (2) automatic parking simulation of Audi A6L.
Automatic parking simulation results of FAW-VW CC
The basic parameters of FAW-VW CC and parking space are shown in Table 1. We should try to avoid the car steering wheel at the maximum rotation angle to protect the vehicle performance, therefore, the R1 is chosen as follows
Basic parameters of FAW-VW CC.
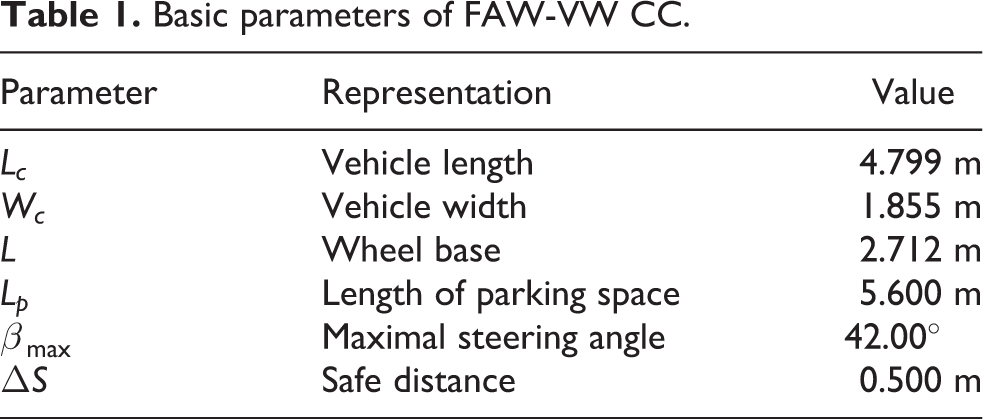

The automatic parking simulation results of FAW-VW CC with constant parking speed (v = 1.5 km/h) are shown in Figures 7 to 14.

The orientation angle of the car of FAW-VW CC automatic parking.

The steering angle of FAW-VW CC automatic parking.

Tracking error of x-axis.

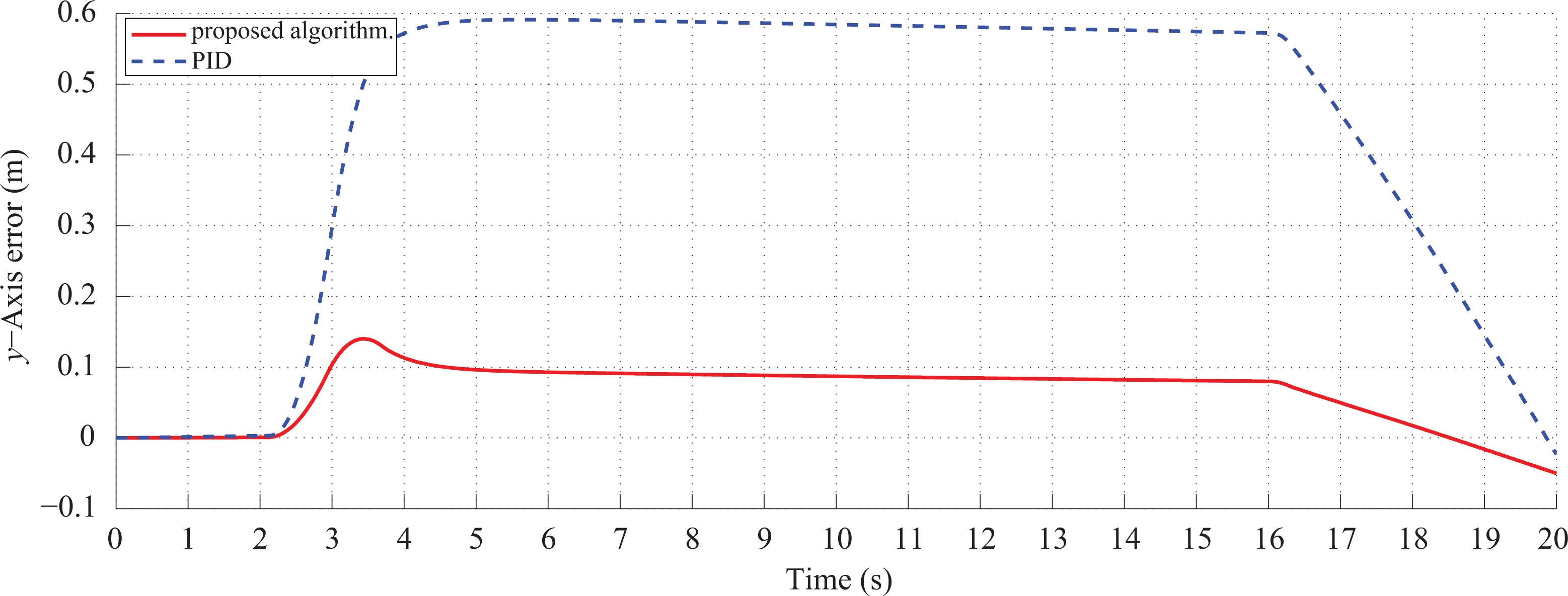
Tracking error of y-axis.
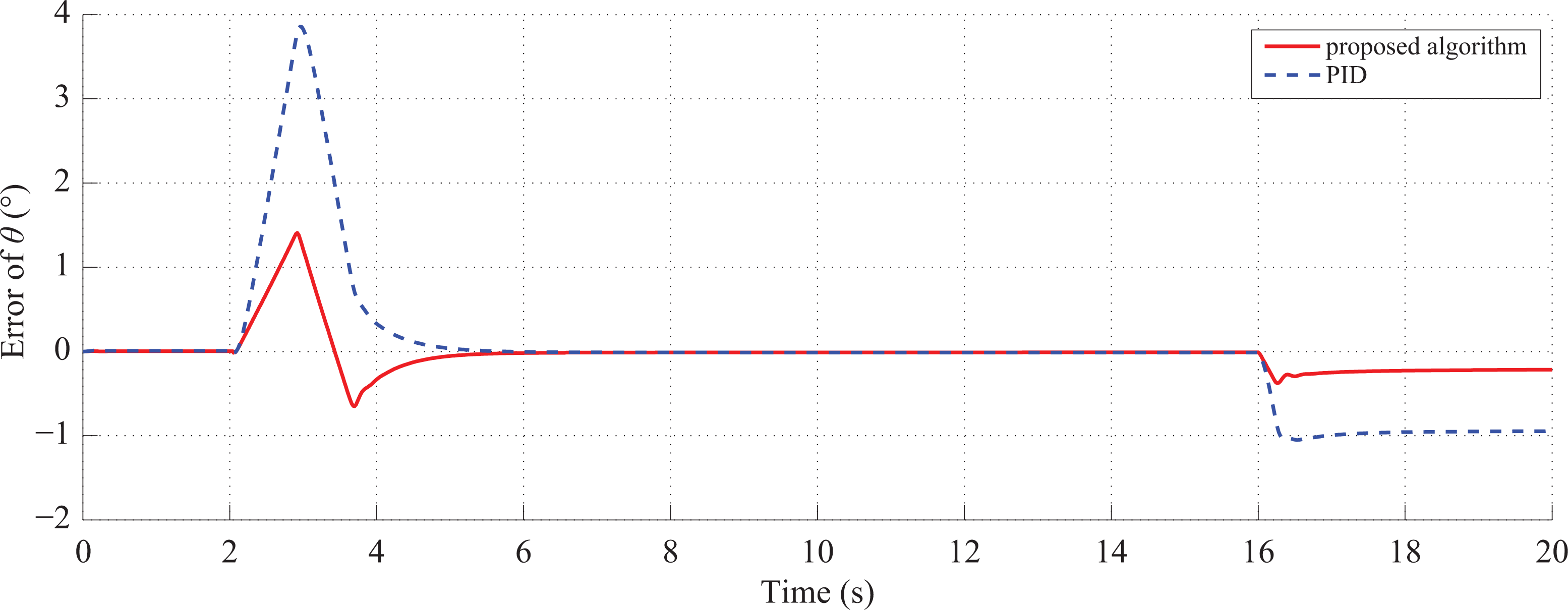
Tracking error of orientation angle of the car.

Compensation signal.
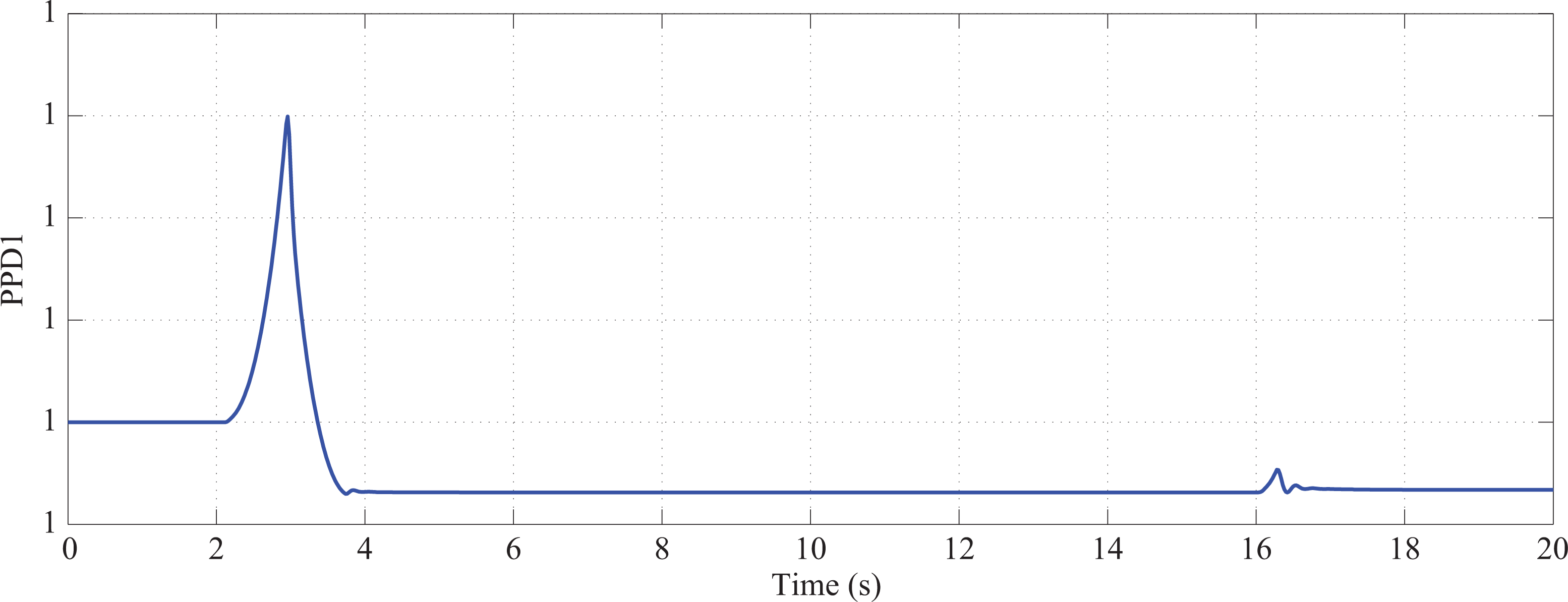
PPD1 parameter estimation. PPD: pseudo partial derivative.
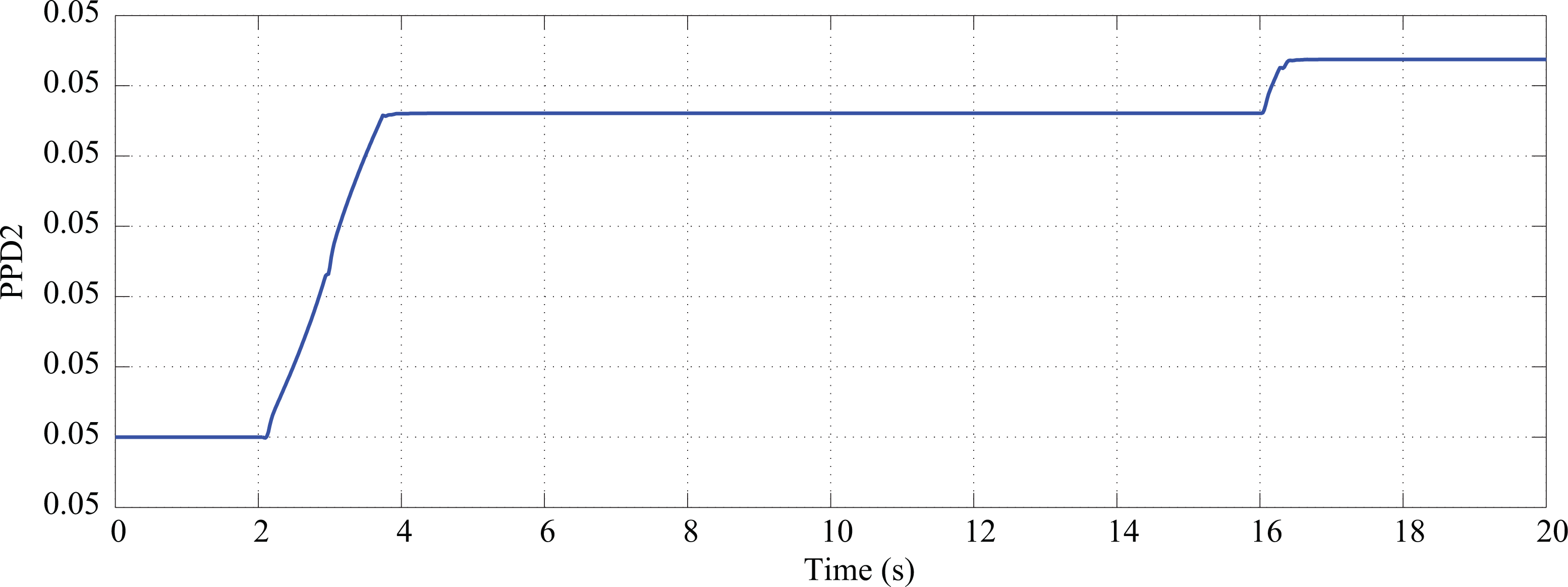
PPD2 parameter estimation. PPD: pseudo partial derivative.
From Figure 7, we observe that the two schemes can both achieve the tracking of the target orientation angle of the car in the automatic parking process. By the local amplification as shown in Figure 7, it can be seen that the tracking effect of the novel data-driven constrained control scheme with coordinates compensation is obviously better than PID control scheme.
From Figure 8, we observe that the steering angle of the two schemes is consistent with the change of the orientation angle of the car in the automatic parking process. The front wheels of the two schemes are not swinging back and forth, which makes the parking process smooth.
The parking error comparisons of FAW-VW are shown in Figures 9 to 11. From these figures, we can see clearly that the tracking error of the novel data-driven constrained control scheme with coordinates compensation is smaller than PID control scheme. The parking error comparisons verified the validity of the coordinates compensation algorithm. The anti-windup compensation signal
Automatic parking simulation results of Audi A6L
The basic parameters of Audi A6L and parking space are shown in Table 2. R1 is same as equation (37).
Basic parameters of Audi A6L.

The automatic parking simulation results of Audi A6L with constant parking speed (v = 1.5 km/h) are shown in Figures 15 to 22. From the simulation comparisons, we observe that the novel data-driven constrained control scheme with coordinates compensation has smaller tracking errors and faster response speed than PID scheme.

The orientation angle of the car of Audi A6L automatic parking.

The steering angle of Audi A6L automatic parking.

Tracking error of x-axis.
Tracking error of y-axis.

Tracking error of orientation angle of the car.

Compensation signal.

PPD1 parameter estimation. PPD: pseudo partial derivative.

PPD2 parameter estimation. PPD: pseudo partial derivative.
Conclusion
A novel data-driven constrained control scheme is proposed for automatic car parking systems. The design of the proposed scheme only depends on the steering angle and the orientation angle of the car, and it does not involve any model information of the car. A coordinates compensation algorithm is also proposed, which reduces the tracking errors of proposed scheme. A dynamic constraints unit with anti-windup compensator is designed to accommodate the reference trajectory
Footnotes
Acknowledgements
The authors sincerely thank the editor and all the anonymous reviewers for their valuable comments and suggestions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (61503156, 61403161, and 51405198) and the Fundamental Research Funds for the Central Universities (JUSRP11562 and NJ20150011).