
Abstract
The optimization design of a robot was usually conducted by the sequential design, which, however, neglected the interactive impacts of different disciplines. To address this shortage, this article presents a design multidisciplinary optimization procedure for a 2-degree-of-freedom robot. In the proposed design optimization, four disciplines are involved, which are composed of kinematics, dynamics, structure, and control. The coupling relationship among the four disciplines is analyzed based on variable sensitivity analysis. A collaborative optimization is proposed to obtain the optimum values of the system-level optimization. With the method of a genetic algorithm, the individual discipline optimization is executed to obtain the subsystem optimum values. The optimized 2-degree-of-freedom robot is able to synthesize an optimum function value and simultaneously shows a good satisfaction to the requirement of all constraints. The structural analysis results demonstrate that the multidisciplinary design optimization is successfully applied to the multi-degree-of-freedom robot design and provides a beneficial reference for the design of more complicated mechanical system.
Keywords
Introduction
Recently, the increasing demand of high-performance machines brought bigger challenges to the system’s design and optimization. In a normal design procedure, several disciplines are involved, which are the interdisciplinary couplings, the multiple objectives, a large design variable space, and a significant number of design constraints. 1 Multidisciplinary design optimization (MDO) can be described as a methodology for the design of systems where the interaction between several disciplines must be considered, and where the designer is free to significantly affect the system performance in more than one discipline, 2 MDO has attracted great interests of many scholars in the aerospace industry.3–9 Based on an MDO framework, Stelmack et al. 10 designed an aircraft brake assembly. Design improvement was achieved by a practical number of system realizations. A multilevel MDO process was constructed and implemented with a hierarchical system. The results showed how a complex tool set was assembled in order to optimize a large civil air liner wing for weight, drag, and cost. 11 The preliminary wing design of a low-speed, long-endurance unmanned aerial vehicle (UAV) was formulated as a two-step optimization problem. Numerical results showed that several useful Pareto optimal designs existed for the preliminary design of UAV wing. 12 Pilcher et al. 13 developed an MDO strategy for the preliminary design of a small utility class aircraft wing. Apart from the application in the field of aerospace, the MDO also attracted many scholars in other research areas, especially the mechanical design. He and McPhee 14 applied a multidisciplinary optimization method to the design of mechatronic vehicles with active suspensions. A computationally efficient numerical procedure was developed for multidisciplinary optimization of railway wheels. 15 Chen and Yang 16 proposed MDO procedure to synthesize optimum mechanisms with commercial software MSC/NASERAN and MSC/ADMS. Two mechanism design problems were presented to test the proposed method. Diez et al. 17 developed a multidisciplinary robust formulation for ship design. Tong et al. 18 investigated multidisciplinary optimization design of bridge crane. The framework of multidisciplinary optimization for bridge crane was proposed considering metal structure level, transmission design level, and electrical system design level. Joly et al. 19 studied MDO of a compact highly loaded fan. The use of MDO for dynamic system design was reviewed, and related efforts were discussed, and a vision for fully integrated design approaches was presented. 20 Cheng et al. 21 considered the mutual interaction of hydrostatics and structure disciplines involved in the design of hydrostatic rotary tables, and a sensitivity-based multidisciplinary optimal design procedure of a hydrostatic rotary table was proposed. Because MDO has excellent performance in dealing with complex systems in many research fields, this article attempts to apply this method to design a 2-degree-of-freedom (DOF) robot.
In this article, the MDO idea is used to design a 2-DOF robot. This article is organized as follows: In section “Multidisciplinary models of the 2-DOF robot,” the four optimization models of the 2-DOF robot are given, including models of the kinematics, dynamics, structure, and control. Coupling relationships among the four disciplines are analyzed, and the collaborative optimization is executed based on sensitivity analysis in section “Sensitivity analysis and collaborative optimization of the 2-DOF robot.” The results of MDO of the 2-DOF robot are shown in section “MDO results based on the collaborative optimization and the genetic algorithm.” In section “Structural analysis of the 2-DOF robot,” structural analysis of the 2-DOF robot is executed to demonstrate the MDO results. Section “Conclusion” shows the research conclusions.
Multidisciplinary models of the 2-DOF robot
A planar 2-DOF robot is shown in Figure 1. 22 Based on the design requirements, four disciplines are involved in the optimization design of the 2-DOF robot.

Design parameters of the 2-DOF robot.
Optimization model of the kinematics
The working region of the robot is shown in Figure 2. The origin of kinematic coordinate is chosen as the base point, and the work region of the robot is described by a series of points. Based on the desired points, the objective function of kinematics is to minimize the accessible region area of the robot. The optimization model of kinematics is as follows:
Find:


where

The accessible region of the 2-DOF robot.
Optimization model of the dynamics
In the view of saving energy, the objective function of dynamics is to minimize the sum of maximum driving moment of the links. Optimization model of dynamics can be expressed by
Find:


where
Optimization model of the structural design
In order to satisfy the requirements of deformation and strength, the objective function of structural mechanics is to minimize the deformation of the end of links. Optimization model of structural design is as follows:
Find:

where




where
Optimization model of the control
Using proportional–derivative (PD) controller, the objective of control is to minimize the error between the response and the input of the system. The optimization model of the control is written as follows:
Find:


where
Sensitivity analysis and collaborative optimization of the 2-DOF robot
Analysis of coupling relationship of four disciplines
A decoupling method of MDO based on sensitivity analysis is proposed. According to the judgment criteria of the degree of coupling, the coupling variables are divided into three grades, including the strong coupling variables, the medium coupling variables, and the weak coupling variables. They are distributed to different disciplines to obtain their optimum values. The details of variable classification are shown in Figure 3.
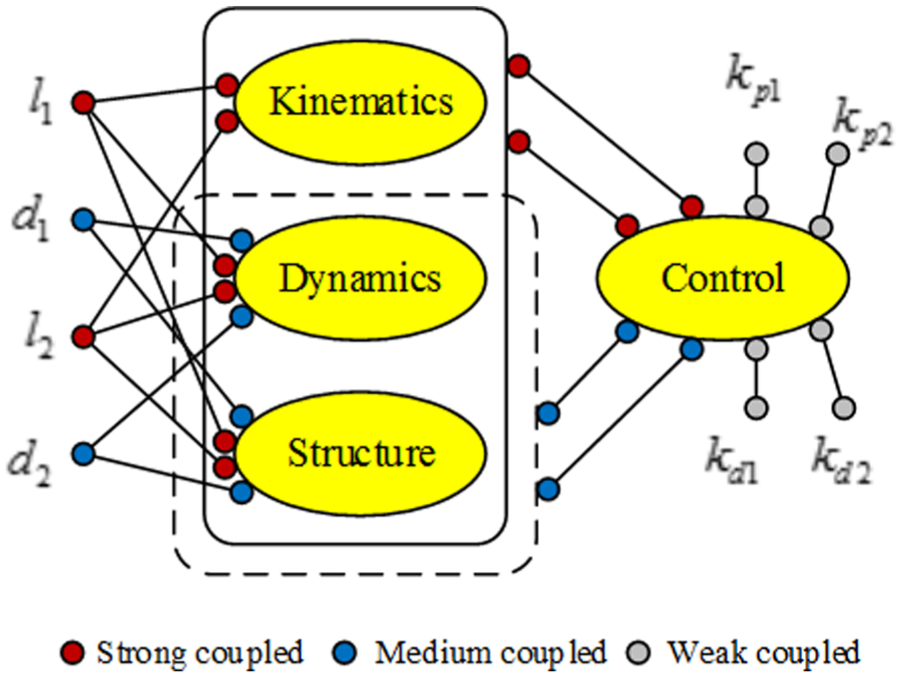
Coupling relationship of design parameters.
Implementation of the collaborative optimization
Collaborative optimization is a design architecture specifically created for large-scale distributed-analysis applications. In this approach, a problem is decomposed into a user-defined number of subspace optimization problems that are driven toward interdisciplinary compatibility and the appropriate solution by a system-level coordination process. 23
The problem is usually decomposed into the system-level optimization and the subspace optimization. Through the subspace optimization, each group is given control over its own set of local design variables and is charged by satisfying its own domain-specific constraints. The objective of each subspace optimizer is to agree upon the values of the interdisciplinary variables with the other groups. A system-level optimizer is employed to coordinate this process while minimizing the overall objective. 24 The advantages of the collaborative optimization architecture are as follows: (1) modification of codes or explicit integration into an automated computing framework may not be required, (2) sub-problems can be optimized by the best-suited method, (3) sub-problems can be added or modified with relative ease, and (4) a large number of variables can be efficiently accommodated. 25
Based on the idea of collaborative optimization, the optimization process is divided into three levels which include the system optimization and the subsystem optimization. According to the coupling degree of disciplines, the flowchart of the collaborative optimization is presented in Figure 4.

Computation flow chart of the 2-DOF robot.
MDO results based on the collaborative optimization and the genetic algorithm
There are three levels during the MDO of the 2-DOF robot. The collaborative optimization is used to coordinate system variables of the different disciplines. Genetic algorithm (GA) is used to execute the optimization of three disciplines, including the kinematics, dynamics, and structure. The parameters of GA are shown in Table 1.
Values of GA parameters.

Collaborative optimization of the kinematics, dynamics, and structure
At the first level, three disciplines of the kinematics, dynamics, and structure are coordinated to obtain the coordination variables’ values of

The iterative process of

The iterative process of

The iterative process of

The iterative process of the collaborative objective function.
Collaborative optimization of the dynamics and structure
At the second level, the dynamics and structure are coordinated. The iterative processes of two disciplines are, respectively, shown in Figures 9 and 10. The iterative process of the collaborative objective function is shown in Figure 11.

The iterative process of

The iterative process of

The iterative process of the collaborative objective function.
The optimization of the control discipline
The third level mainly involves the optimization of control parameters. The iterative process of control parameters is shown in Figure 12. The iterative process of the control objective function is shown in Figure 13.
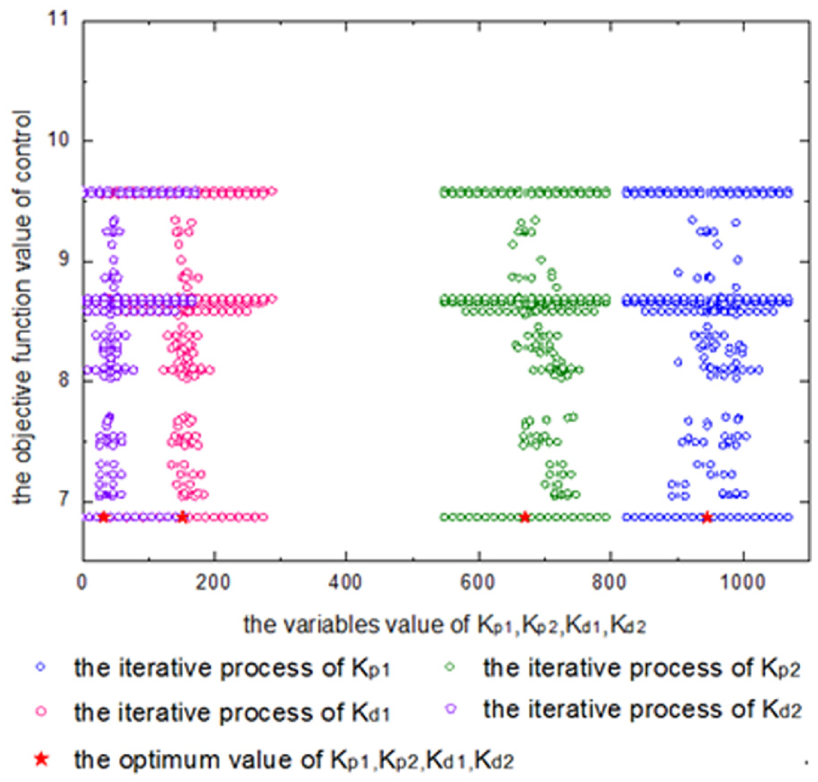
The iterative process of the control parameters.

The iterative process of the control function.
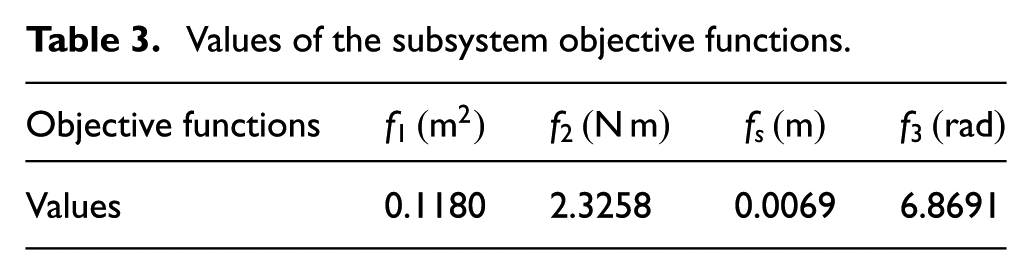
The optimum values of variables are illustrated in Table 2. The optimum values of the objective functions are shown in Table 3.
Values of the design variables.

Values of the subsystem objective functions.
Structural analysis of the 2-DOF robot
In order to verify the validation of the multidisciplinary design optimization results, the structural analyses are executed based on the software ANSYS. The analysis results are shown in Figures 14–16. Figure 14 shows the results of stress analysis, including the stress distribution and the maximum stress point of the 2-DOF robot. The maximum value of the stress is 5.1773 MPa, which is far less than the yield limit of the material.

The stress distribution of the 2-DOF robot: (a) the global stress analysis and (b) the maximum stress point.

The strain distribution of the 2-DOF robot: (a) the global strained analysis and (b) the maximum strain point.

The maximum displacement variation of the 2-DOF robot.
Figure 15 shows the results of the strained analysis, including the strained distribution and the maximum strained point of the 2-DOF robot. The maximum value of the strain is 3.104e−5. Figure 16 shows the maximum displacement point of the 2-DOF robot. The maximum value of displacement is 1.3533 mm, which is satisfied by the design requirements.
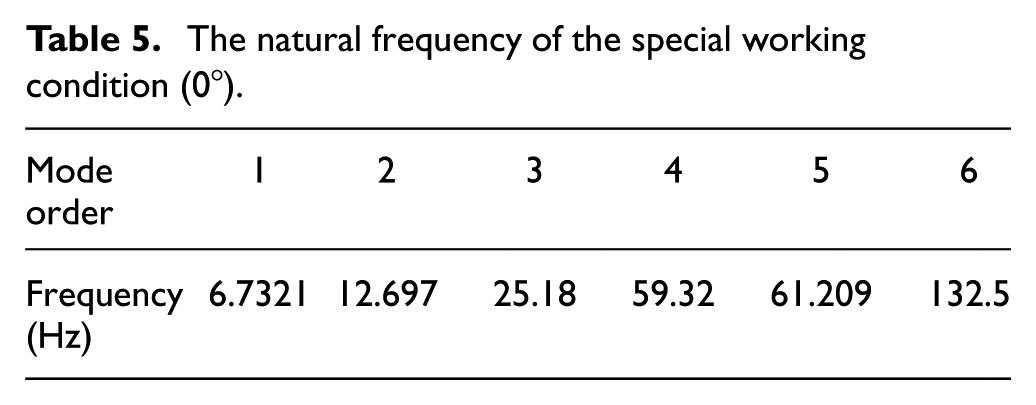
When the natural frequency of the working robot is nearly equal to the frequency of the outside force, the resonance phenomenon will occur, the dynamic stiffness of the structure will reach the least value, the deformation is easy to appear, and the deformation under dynamic loads is several times or dozens of times the static deformation. According to solving the modal analysis, the natural frequencies of the structure can be determined, and the working resonance can be avoided. The typical working condition results of the natural frequencies are shown in Table 4. Figure 17 shows the first six modes of the 2-DOF robot. From the analysis results, it can be concluded that the arm bends downward in the first three modes and the fifth mode and bends upward in the fourth mode and the sixth mode. From the vibration mode shape, the first mode and the second mode belong to the first bending, the third mode and the fourth mode belong to the second bending, and the fifth mode and the sixth mode belong to the third bending. Due to the symmetry of the structure, the third mode is similar to the fourth mode. There are two special working conditions when the angles between two arms are
The natural frequency of typical working condition.


The mode shape analysis of the 2-DOF robot: (a) the first mode shape, (b) the second mode shape, (c) the third mode shape, (d) the fourth mode shape, (e) the fifth mode shape, and (f) the sixth mode shape when the angle value of two arms is between 0° and 90°.
The natural frequency of the special working condition (

The mode shape analysis of the 2-DOF robot: (a) the first mode shape, (b) the second mode shape, (c) the third mode shape, (d) the fourth mode shape, (e) the fifth mode shape, and (f) the sixth mode shape when the angle value of two arms is 0°.
The natural frequency of the special working condition (
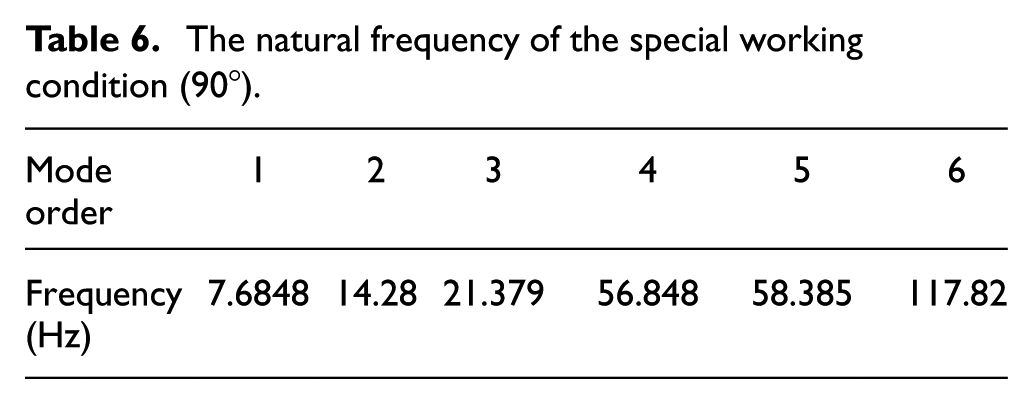

The mode shape analysis of the 2-DOF robot: (a) the first mode shape, (b) the second mode shape, (c) the third mode shape, (d) the fourth mode shape, (e) the fifth mode shape, and (f) the sixth mode shape when the angle value of two arms is 90°.
Conclusion
In this article, the multidisciplinary optimization design of a 2-DOF robot is studied involving four disciplines which are the kinematics, dynamics, structure, and control. Based on the design requirements, the optimization models are built up. Sensitivity analyses of variables are used to analyze the coupling relationship of four disciplines. The MDO process is divided to three levels. Through collaborative optimization and GA, the optimizations of the system and subsystem are executed. The structural analysis is executed to demonstrate the optimization results. The numerical results indicate that MDO can be successfully applied to deal with the complex robot system. The research can provide a new design idea for more complicated mechanical system design, such as machine tool, automobile, and high-speed train system.
Footnotes
Academic Editor: José Tenreiro Machado
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 51405401).