
Abstract
Because of the increasing complexity in engineering systems, multidisciplinary design optimization has attracted increasing attention. High computational expense and organizational complexity are two main challenges of multidisciplinary design optimization. To address these challenges, the hierarchical control method of complex systems is developed in this study. Hierarchical control method is a powerful way which has been utilized widely in the control and coordination of large-scale complex systems. Here, a hierarchical control method–based coupling relationship coordination algorithm is proposed to solve multidisciplinary design optimization problems. Coupling relationship coordination algorithm decouples the involved disciplines of a complex system and then optimizes each discipline objective at sub-system level. Coupling relationship coordination algorithm can maintain the consistency of interaction information (or in other words, sharing design variables and coupling design variables) in different disciplines by introducing control parameters. The control parameters are assigned by the coordinator at system level. A mechanical structure multidisciplinary design optimization problem is solved to illustrate the details of the proposed approach.
Keywords
Introduction
Modern design methods for complex engineering systems have obtained increasing attention to achieve relatively better design solutions recently.1–7 There are usually many different sub-systems (or in other words, disciplines) in a complex system. It is critical to transform an engineering optimization problem into its corresponding mathematical model. If the formulation in mathematical model is improper, it may result in unacceptable design solutions. Traditional design optimization methods can solve the corresponding design problems of sub-systems individually. However, it is generally difficult for the traditional design optimization methods to find the optimal solutions of whole system.8–10 Thus, more advantageous design strategies are necessary and should be developed.
Multidisciplinary design optimization (MDO) is powerful to satisfy the above requirements. The definition of MDO can be depicted as one strategy for the arrangement of large-scale organization in which the high dimension of interactive information between coupling components motivates designers to manipulate input information in different sub-systems simultaneously.11–13 In MDO, a system optimization problem can be divided into some small-scale sub-problems design problems. A coordination strategy is utilized to drive all design variables in sub-problems toward the solutions which are also optimal for original system optimization problem. It will be more convenient to organize different small-scale discipline models and provide necessary communication if a complex system can be divided into many sub-systems. Hence, decomposing large-scale systems facilitates the concurrent design in modern engineering.14,15
Many hierarchical and nonhierarchical manners have been proposed to address issues of MDO. For nonhierarchical manners, such as multiple-discipline-feasible method, necessary iterations are conducted to satisfy that multidisciplinary analysis (MDA) problems can be solved successfully. 16 In the all-at-once method, feasibility can be guaranteed if optimization convergence is obtained. 17 The individual discipline feasible approach can keep the feasibility of individual discipline analysis during the whole optimization process. Furthermore, the multidisciplinary feasibility (MDF) of complex systems can be satisfied when the convergence of MDO problems is obtained. 18 The concurrent subspace optimization (CSSO) method uses global sensitivity equations to assign different disciplinary design optimization problems to the corresponding professional design team. Global coordination modules are required in CSSO to keep the MDF of MDO. 19 For hierarchical manner, bi-level integrated system synthesis connects system and sub-system objectives using global sensitivity equation (GSE). Thus, MDO solutions can be obtained by solving discipline design optimization problems. 20 In the analytical target cascading (ATC) method, all target value of top level variables are propagated to appropriate format for different disciplines in a consistent way. 21 The collaborative optimization (CO) method minimizes the deviations between target value from system level and response value from sub-system level using compatibility constraints.22–29
In this study, a coupling relationship coordination algorithm (CRCA) is integrated into the framework of MDO based on large-scale systems control and coordination strategy. In CRCA, whole system is divided into several sub-systems (disciplines) along discipline boundaries. The system-level coordinator provides initial values of control parameters as the optimization parameters of discipline optimization problems. Then, the solutions of different discipline optimization problems can be obtained and provided to system-level coordinator for updating control parameters. After that, all updated control parameters are provided to each discipline optimization problems again to minimize differences between interaction variables from different disciplines. Compared with the existing MDO methods, CRCA allows that the system coordinator can just focus on updating the control parameters to maintain the interdisciplinary consistency at system level. This process treats the design variables as design parameters and does not be involved in the objective optimization directly. At the same time, discipline optimizers can focus on optimizing the sub-system objectives in each discipline independently. During CRCA process, all control parameters are treated as design parameters and do not affect the other disciplines’ optimization processes mutually.
The rest of this study is organized as follows. The MDO problem is introduced in section “The MDO problem.” Meanwhile, MDF and CO are also briefly reviewed as comparison methods. The details of proposed approach are given in section “CRCA for MDO problem,” including the formulation and the procedure. In section “Test example,” a design problem of speed reducer is utilized to illustrate the application of proposed method. Conclusions are given in section “Conclusion.”
The MDO problem
In a complex system, there is more than one sub-system (discipline). The outputs of a discipline may be the inputs of other disciplines. As shown in Figure 1, in a multidisciplinary system, there are many coupling sub-systems. These coupling sub-systems can be depicted by discipline analysis. An interacting sub-system not only has a certain degree of disciplinary autonomy but also depends on other sub-systems because of sharing variables and coupling variables.
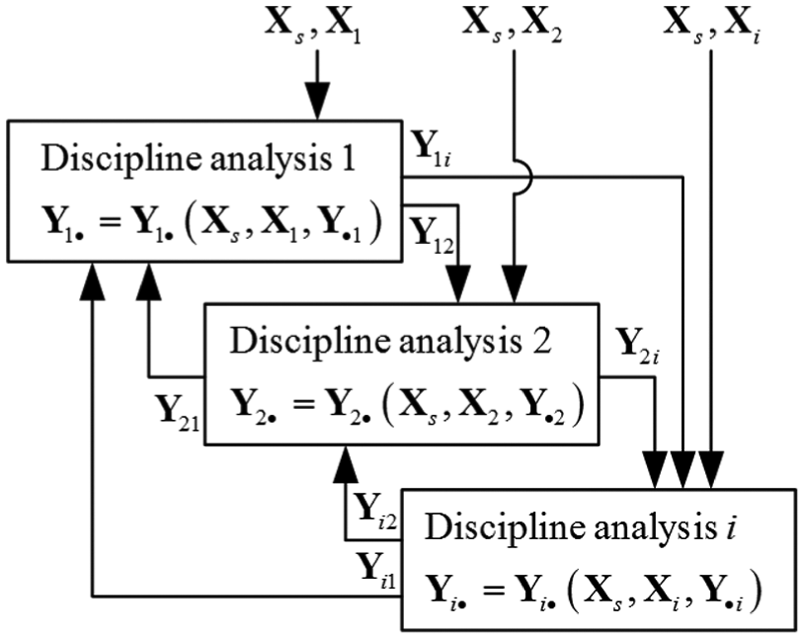
MDO discipline decomposition.
Correspondingly, in this study, the formulation of an MDO problem is given as
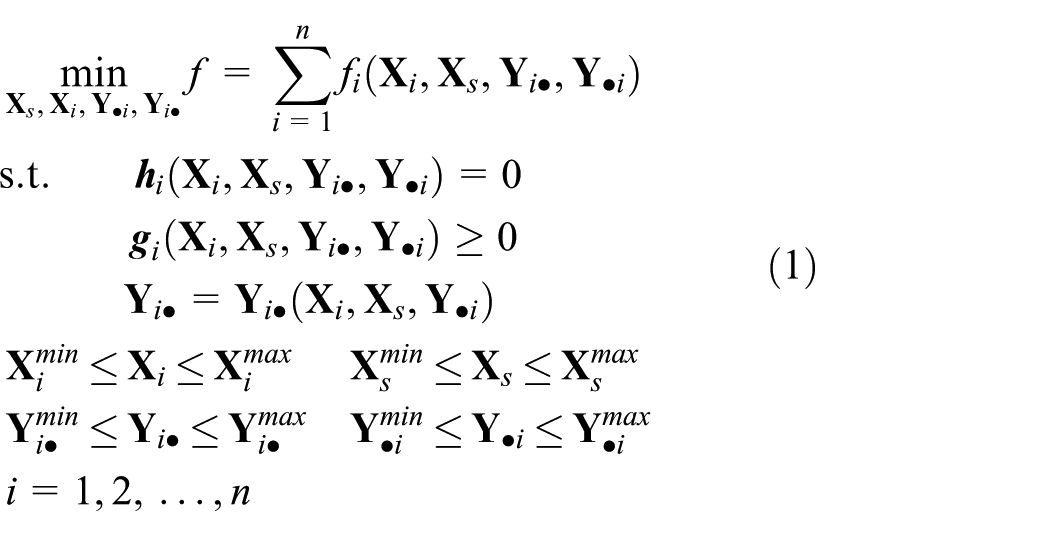
where
The review of MDF
MDF is a classic MDO approach, which is also one of the variable reduction methods. When using MDF to solve the optimization problem in equation (1), a nonlinear programming is required and introduced. The analysis for multidisciplinary system is considered as a black box. Meanwhile, all design information is treated as independent input. Thus, there is no need to change the formulation of equation (1). In this way, MDO problems can be considered as nonlinear design problems.
18
In each iteration of optimization, as shown in Figure 2, design variables are chosen as inputs of MDA. MDA usually represents the state equations

The structure of MDF strategy.
MDF could be an efficient method to obtain accurate results when solving a simple problem. In each iteration of optimization, MDF can be maintained by MDA. However, it is usually difficult or impractical to utilize MDF because of the high complexity of engineering systems. First, the difficulty of analysis integration may result in heavy calculation burden for MDF. Second, MDA should be performed by computing derivatives in each iteration, if finite-difference derivatives are introduced. Moreover, the MDF algorithm is sensitive to the fixed-point iteration and the convergence of MDA, which may be detrimental to the robustness of MDF. 30
The review of CO
There is a two-level structure in CO method. Compatibility constraints J exist at the system level and sub-system level, respectively. The compatibility constraints are used to coordinate the balance of coupling information between different disciplines. The responsibilities of analysis and design are assigned to every discipline. As shown in Figure 3, all disciplines are communicated by a system-level coordination routine. Specific discipline information does not have to be communicated with other disciplines. To assure that all discipline constraints can be satisfied in each local group, discipline information is allowed to disagree with other disciplines during discipline design process. All discipline objectives are to minimize the interdisciplinary discrepancies. The coordination optimizer at system level guarantees the discrepancies can vanish. More specifically, target values of

The structure of CO strategy.
There are many advantages of CO. 31 In CO, compatibility constraints are utilized instead of MDA to satisfy the requirement of MDF at system level. Consequently, the discipline autonomy regarding optimization and analysis can be enjoyed in CO. The process of discipline analysis can also be conducted in parallel. Furthermore, CO can take advantage of different discipline analysis software to obtain MDF during the whole optimization process. However, it will be hard for CO to produce Karush-Kuhn-Tucker (KKT) points if very high nonlinear constraints are introduced. It is because that the number of compatibility constraints in CO is equal to coupling dimensions. Consequently, it will be suitable for CO to solve the MDO problems which have small number of interaction variables. Furthermore, the objective and constraints of original optimization problem must be assigned into system level and sub-system level, respectively. Thus, although every discipline optimization process can enjoy autonomy, explicit discipline objectives do not exist in each discipline optimization problem. Meanwhile, there are also no general constraints at system level.
CRCA for MDO problem
The original purpose of CRCA is to present the theory of control and coordination in large-scale complex systems. Its convergence condition is also proved by Findeisen et al. 32 Here, CRCA is introduced to solve MDO problems. In MDO problems, as shown in Figure 1, in order to realize the decoupling among different disciplines, a large-scale engineering system can be divided into some disciplines according to discipline boundaries. In this study, the ith discipline analysis is illustrated in Figure 4.

The ith discipline analysis.
In Figure 4, the discipline coupling consistency requirements can be considered as coupling equations

It should be noted that, for discipline i, the coupling input

Herein, we introduce control parameters
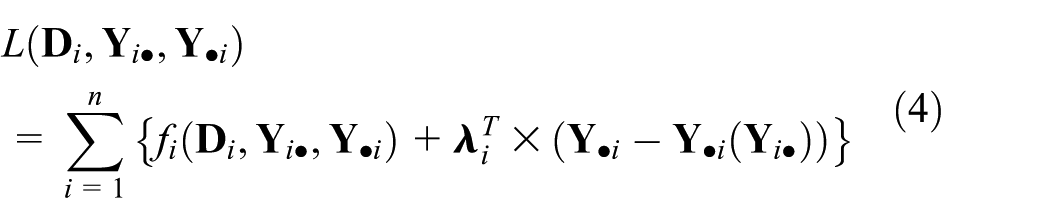
Obviously, the Lagrange formulation of system objective function could be equal to system objective function when all coupling equations are satisfied. Based on the discipline decomposition, equation (4) can be decomposed into several sub-Lagrange functions for different disciplines


In equations (5) and (6), the ith Lagrange formulation is the function of discipline inputs

The best value of control parameters which meet the requirements of coupling equations can be found by system coordination. In this study, this process is stated as an optimization problem

Based on the Lagrange duality theorem, the optimization in equation (3) will be equivalent to the Lagrange dual optimization in equation (9), if there is a saddlepoint for equation (4)

Note that the derivative of

If
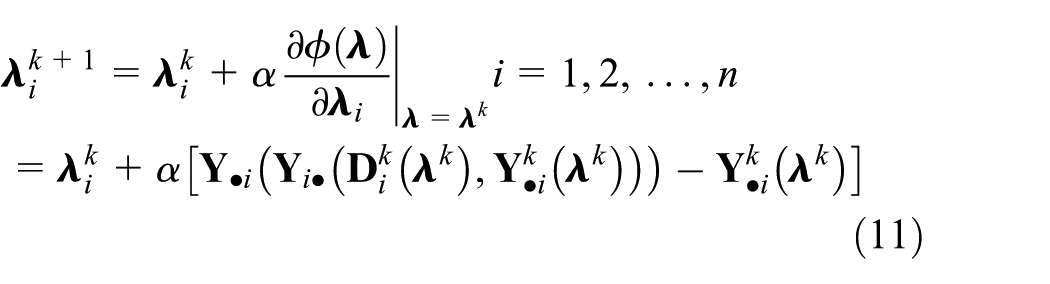
where
Step 1. Set initial values for control parameters
Step 2. Assign control parameters
Step 3. Calculate
Step 4. Check the convergence. If objective does not change drastically and
Step 5. Obtain the new control parameters
Step 6. End the procedure. Obtain the optimum solutions

The two-level optimization structure of the CRCA strategy.

The flowchart of CRCA.
Test example
The speed reducer design example is derived from the National Aeronautics and Space Administration (NASA) MDO evaluation examples which are shown in Figure 7. 33 In this study, it is an MDO problem consisting of the bearing-shaft group 1 (discipline 1) and the bearing-shaft group 2 (discipline 2). The solutions obtained by CRCA are compared with the solutions obtained by CO and MDF, respectively. All optimization processes are conducted with MATLAB™ software.

The speed reducer design problem.
Table 1 shows the details of the design information. In this study, minimizing the speed reducer volume is chosen as the objective of this MDO problem. Correspondingly, minimizing the volume of the bearing-shaft group 1 and the bearing-shaft group 2 is chosen as the discipline objective. The original problem is modified into an MDO problem as shown in Figure 8. Detailed statements are provided in equations (12)–(14).
The details of design information.


The MDO problem of speed reducer design.
Discipline 1 optimization problem

Discipline 2 optimization problem

where
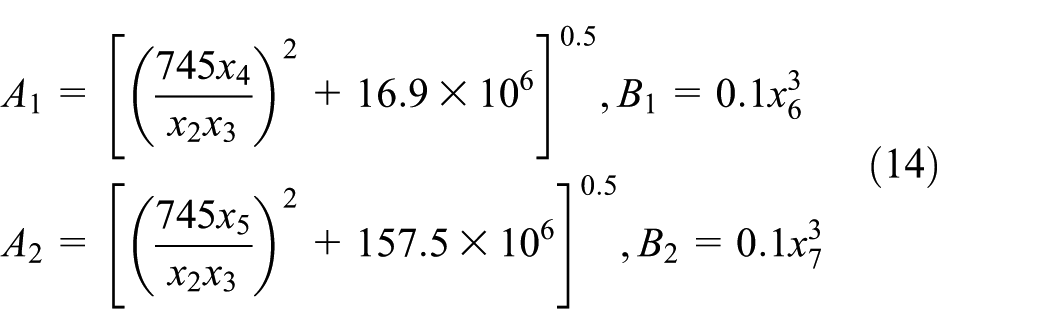
Herein, sharing variables
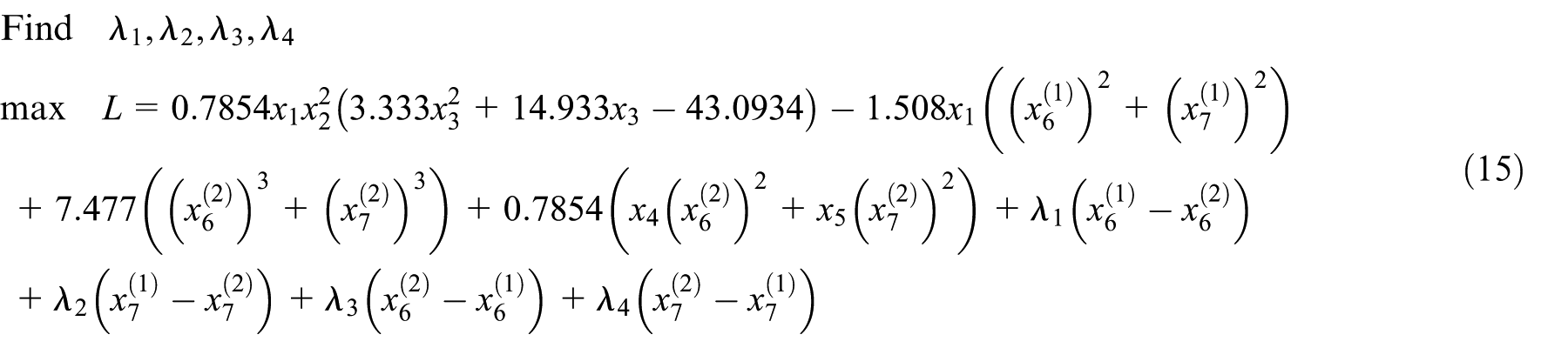
More specially, for the CRCA approach, this MDO problem is modified into a coordination problem and two discipline design problems. Using CRCA, we change equality constraints
1. The system coordination optimization problem
2a. Optimization problem for discipline 1

2b. Optimization problem for discipline 2
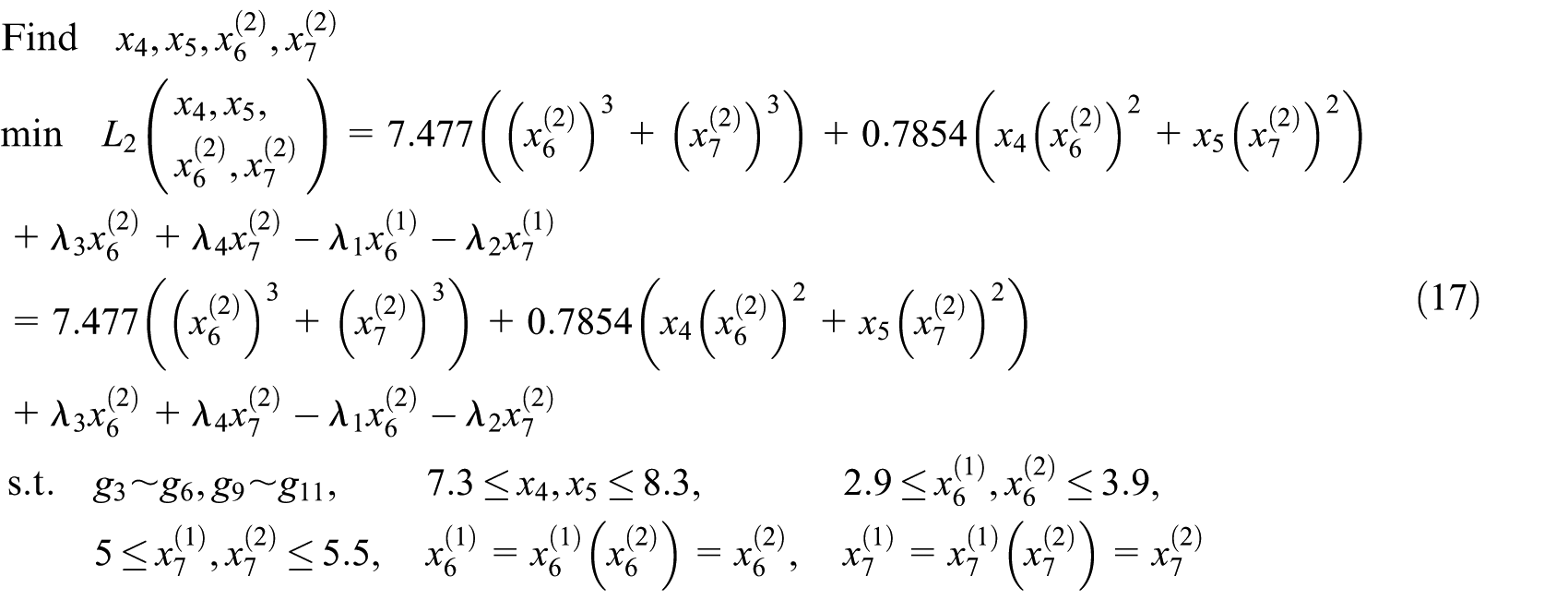
where

The application of CRCA approach in the test example.
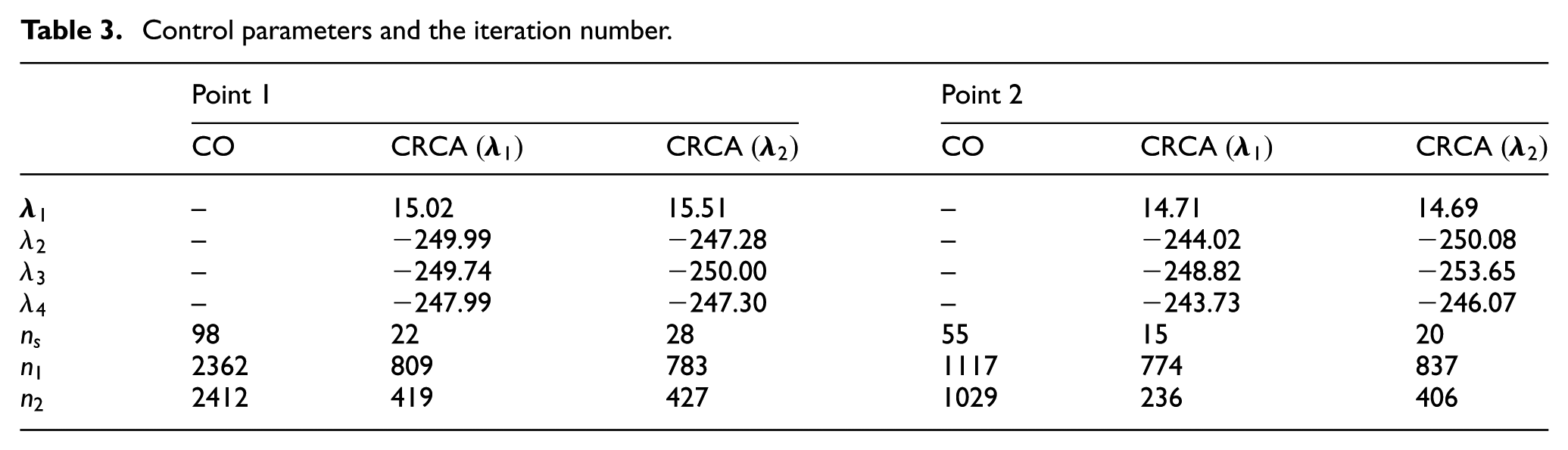
Here, the MDO problem is solved at two different initial points: point 1 (2.65, 0.63, 18, 6.80, 6.400, 3.00, 5.099) and point 2 (3.50, 0.70, 17, 7.30, 7.715, 3.35, 5.287), respectively.
Initial control parameters are


The results are compared with solutions obtained by different MDO methods, which are shown in Tables 2 and 3.
Design solutions from different MDO methods.
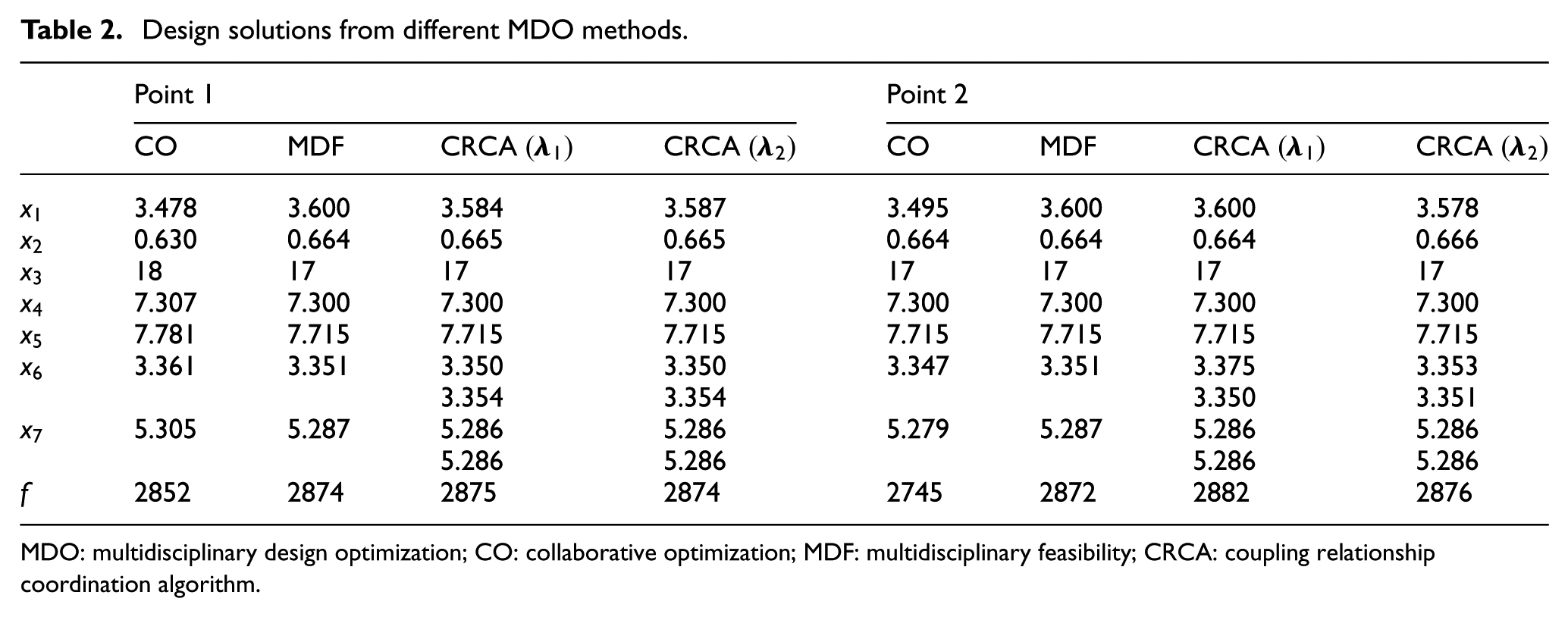
MDO: multidisciplinary design optimization; CO: collaborative optimization; MDF: multidisciplinary feasibility; CRCA: coupling relationship coordination algorithm.
Control parameters and the iteration number.
Conclusion
In this study, a control and coordination method of large-scale systems is introduced into MDO and the corresponding formulation of CRCA is proposed. The application of CRCA into MDO has several advantages including: (1) enjoying less transferred variables and parameters between coupling disciplines; (2) removing the MDA of complex engineering systems; (3) employing professional experts and discipline software for different discipline optimization problems; and (4) providing a parallelized analysis and design strategy, which is more suited for modern discipline distribution. An example is utilized to illustrate the application of CRCA in MDO.
Footnotes
Academic Editor: Yongming Liu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China (grant no. 51605047), the China Postdoctoral Science Foundation (grant no. 2016M602687), and the Fundamental Research Funds for the Central Universities of China (grant no. ZYGX 2015KYQD045).