
Abstract
This article investigates the consensus tracking control problem of the leader–follower spacecraft formation system in the presence of model uncertainties, external disturbances, and actuator saturation, where the relative motion of the leader and the follower need to track a desired time-varying trajectory given in advance. First, the six-degree-of-freedom relative-coupled translational and rotational dynamics models are derived using the exponential coordinates on the Lie group SE(3). Then, a fast terminal sliding mode control law is proposed to guarantee the tracking control objective come true in finite time robust against all the aforementioned drawbacks. As a stepping stone, an extended state observer is designed to estimate and compensate the total composed disturbances of the system, and it is proved that the estimate errors can converge to a really small neighborhood of the origin in finite time. Based on the observer information, a less-conservative modified controller is furthermore developed to eliminate the chattering caused by the signum function. The stability of the closed-loop system is shown by theoretical analysis. Finally, the validity of the proposed schemes is illustrated through numerical simulations.
Introduction
In recent years, spacecraft formation flying (SFF) as a key technology for realizing many important space missions, such as spacecraft rendezvous and docking, monitoring of the Earth and its surrounding atmosphere, deep space imaging and exploration, space-based interferometry, stereo-imaging, and terrain mapping, has received wide attention.1–4 Since the functionality of a large complex spacecraft can be achieved by the SFF system which consists of multiple simpler distributed ones, the system robustness, control accuracy, flexibility in configuration, and mission cost have all been improved.5–7 In Scharf et al., 8 a survey on the field of SFF was given by dividing the previous synchronization control schemes into five architectures with leader–follower (LF) included. As one of the basic schemes, the developed control schemes on LF have been applied in many aerospace missions. Traditionally, the translational and rotational motion for spacecraft are controlled independently without considering their coupling, which leads to poor control results. In order to meet the requirements of aerospace missions with high control accuracy, taking spacecraft rendezvous and docking for example, the follower is required to finish large angular maneuver and complicated translational maneuver with respect to the leader simultaneously, while high control accuracy needs to be satisfied, a six-degree-of-freedom (6-DOF) model taking the relative translational motion, rotational motion, and their coupling into consideration is required.
The 6-DOF relative-coupled dynamics for SFF system described by the exponential coordinates on the Lie group SE(3), which is the set of positions and orientations of the spacecraft moving in three-dimensional (3D) Euclidean space, as a useful mathematical tool has received increasing attention as in Lee and colleagues7,9 and Nazari et al. 10 However, structured and unstructured uncertainties haven’t been considered in these papers, which can’t be ignored due to external environment disturbances or fuel consuming or components/payloads releasing. That is to say, the controllers designed in these papers have poor robustness. Meanwhile, the controllers designed in Lee and colleagues7,9 could only guarantee asymptotical convergence of the system states, which means that the control objectives will realize when time tends to infinity, and the consensus problem was solved by a local stability controller in Nazari et al. 10
Terminal sliding mode control (TSMC) proposed in Yu et al. 11 for rigid robotic manipulators could provide finite-time stability in both the reaching phase and the sliding phase, which has been widely studied and explored in the spacecraft control field due to its ability to deal with the external disturbances and model uncertainties, such as finite-time attitude tracking control problem for rigid spacecraft solved in Jin and Sun, 12 finite-time SFF orbit reconfiguration control in Hui and Li, 13 and a terminal sliding mode (TSM)-based observer developed in Xiao et al. 14 to reconstruct all the states of the attitude system in the presence of actuator failures in finite time. However, TSM has two disadvantages of slower convergence than the sliding mode control (SMC) when the system states far away from the equilibrium and the singularity problem. In Liang et al., 15 the above two problems were solved properly; a fast terminal sliding mode (FTSM) without singularity was proposed to guarantee robust decentralized attitude control for spacecraft formation. But, the designed controller had a chattering issue since a positive definite constant matrix with a signum function was used to deal with the total system disturbances.
When taking actual system into consideration, due to physical limitations on actuator, controller output saturation can’t be ignored since it can reduce the performance of the closed-loop system. Dealing with this phenomenon, the nonlinearity of the system model will be more complicated leading the chattering issue worse. Recently, combining disturbance observer (DO) with TSMC has shown good control performance and could robust against complicated disturbances, while the chattering problem has been solved well in Wei and Guo 16 and Chen et al. 17 Among the DO methods, extended state observer (ESO) is an effective way; by considering the system composed disturbances as an extended state of the system, all the states including the extended one can be estimated by the ESO in finite time with high accuracy. 18 In Zhai and Xia, 19 the control objective was achieved in finite time by introducing a switching-technique-based error observer into the design framework, and further an adaptive finite-time controller with an anti-windup compensator and the error observer was developed to achieve finite-time tracking in Zhai and Xia. 20 High-order sliding mode (HOSM) technique moves the discontinuous action to the higher derivatives of the system, and compared with other chattering elimination methods, it can not only eliminate the chattering but also increase the accuracy such as observers with finite-time convergence and high accuracy developed in Van et al. 21 and Zou 22 to estimate system states. Meanwhile, an alternative solution to eliminate the couplings in the developed 6-DOF model is output-feedback control design, which has been widely applied such as Wei et al.23,24
Inspired by these facts, this article attempts to design a control scheme on the LF system robust against external disturbances, model uncertainties, and actuator saturation, such that the follower states can converge to the predefined states with respect to the leader in finite time suitable for missions with high accuracy and quick maneuver tracking requirements. The main contributions of this article are as follows:
With consideration of model uncertainties, external disturbances, and actuator saturation, a 6-DOF relative-coupled translational and rotational dynamics models are derived using the exponential coordinates on the Lie group SE(3).
A robust controller with a fast terminal sliding manifold constructed by the exponential coordinates and velocity tracking errors is proposed to guarantee the finite-time stability of the closed-loop system.
An ESO motived by HOSM is designed to estimate the system composed disturbances, based on which a modified controller with less conservation is constructed to eliminate the chattering and enhance control accuracy.
The remainder of this article is organized as follows: in section “Spacecraft modeling and preliminaries,” the mathematical model of a single rigid spacecraft, the relative-coupled dynamics, and some preliminaries which will be used in controller design part are presented; then, the main purpose of this article is given in section “Problem statement.” In section “Controller design and stability analysis,” the main results of this article are given, in which the designed controllers, the ESO, and their stability theoretical analysis are finished. In section “Simulation results,” numerical simulations are presented to prove the effectiveness of the proposed control schemes, followed by conclusions in section “Conclusion.”
Spacecraft modeling and preliminaries
In this article, two Earth-orbiting spacecrafts known as the LF spacecraft formation is considered, both of which are regarded as a rigid body. The follower spacecraft is tasked to keep a specified consensus state consisting of synchronized attitude and predetermined position configuration with respect to the leader one, whose trajectory in a constrained orbital motion is computed offline. In this section, based on the kinematics and dynamics of a single rigid spacecraft, the relative-coupled dynamics of the leader and the follower based on Lie group SE(3) are derived. Meanwhile, some preliminaries are given to finish the theoretical analysis in this article.
Mathematical model of a single rigid spacecraft
Before developing the models, the following coordinate frames will be introduced first as shown in Figure 1. The Earth-centered inertial frame

Definition of the coordinate reference frames.
Let

where

The SE(3) is a Lie group expressed by the semidirect product

can be used to represent the orientation and position of a spacecraft in a compact form. 10 Using this representation, the kinematics equation can be expressed as

where

Let the mass of the spacecraft be

where
Considering the Earth’s oblateness and the coupled relationship between translational and rotational motion,




where
The dynamic equations can be expressed in a compact form as

where

and the adjoint operator

Equations (4) and (11) are the kinematics and dynamics of a single rigid spacecraft on SE(3), respectively.
Relative-coupled dynamics
Next, based on the mathematical model of a single rigid spacecraft, the relative-coupled dynamics between the leader and follower spacecraft will be given.
Let

If the desired configuration of the follower with respect to the leader is

the configuration tracking error would be

Then, the configuration tracking error expressed by exponential coordinates

can be calculated by

where

where

where
The relative velocity of the follower with respect to the leader expressed in the body frame of the follower is

where the adjoint action map defined for

Then, the kinematics in exponential coordinates as given in Brás et al. 26 is

where

where


According to equation (22) and

Substituting equation (11) into equation (26) produces

Then, the relative-coupled dynamics between the follower and the leader can be modeled by equations (24) and (27).
However, considering actual system, the model uncertainties can’t be ignored. Let the actual matrix with moment of inertia matrix and mass be

where
Remark 1
Employing exponential coordinates on the Lie group SE(3), the relative-coupled dynamics between the leader and follower is formed by equations (24) and (28) in a united framework. In equation (24), the existence of
Preliminaries
For the simplicity of expression, throughout this article, the following notations are defined as follows: for a real number

where
In order to facilitate the stability analysis of the controller, the following assumptions and lemmas are presented.
Assumption 1
The composed disturbance of the spacecraft

where
Lemma 1 11
For a continuous positive definite function

then,

where
Lemma 2 12
For a continuous positive definite function

where

Lemma 3
The eigenvalues of matrix
Proof
In Lee et al.,
9

Multiplying both sides of equation (35) by

When
Problem statement
In this research, a LF spacecraft formation is considered. The control objective herein is to design a robust controller against the model uncertainties and external disturbances based on the relative-coupled dynamics equations (24) and (28) by the use of the SMC algorithm, such that the follower trajectory can converge to the reference state with respect to the leader in finite time, and then maintain the certain relative configuration, which can be expressed as
Controller design and stability analysis
In this section, based on the relative-coupled translational and rotational dynamics described by equations (24) and (28), a class of robust terminal SMC laws using the exponential coordinates and relative velocities is proposed to achieve the control objective stated in section “Problem statement.” The proposed control schemes are effective against the composed disturbance of the system, and by employing Lyapunov methods, the convergence of the closed-loop system is proved theoretically.
Finite-time controller synthesis
For the convenience of the following analysis, we put the relative-coupled dynamics equations (24) and (28) together with one equation number

To guarantee the system states converge to the equilibrium in finite time, TSM is first developed. However, its convergence time is longer than that of the conventional SMC when far away from the equilibrium point. To enhance the convergence speed, based on Liang et al., 15 we first propose a FTSM which is designed with the following form

where

Consider a Lyapunov function candidate as

where
Remark 2
In the proposed FTSM manifold equation (38), the sliding surface is defined by configuration errors described by exponential coordinates
Theorem 1
Consider the spacecraft system governed by equation (37), and based on the fast terminal sliding surface equation (38), if Assumption 1

where

Proof
Consider the following Lyapunov function candidate

calculating the derivative of

Then, substituting control law (41) into equation (44), we have
where
Remark 3
Because of the term
Remark 4
Due to physical limitations on actuator, special attention should be paid to actuator saturation, then the actual output of the controller acts on the system can be expressed as

Then, we have
Remark 5
To eliminate the chattering phenomenon caused by the signum function in equation (41), the saturation function is employed to replace

where
Although by introducing the saturation function, the chattering can be eliminated in a certain degree, in equation (42) we know that only when
ESO-based controller design
First, a coordinate transformation is defined as

with

where
Based on the finite-time observer in Zou, 22 an ESO is designed in the form of

where
Define the observer errors as

Theorem 2
Consider the system described by equation (50) in combination with the ESO equation (51). Give the initial estimation of

where
Proof
By extending the ideas of Moreno and Osorio, 28 we candidate the following Lyapunov function

which can be written as

where

Thus, we have

where
Taking the derivative of

With the definitions in equation (54), after some algebraic manipulation, we have

Using

From equation (57), we know that

Let

Then, using Lemma 2, we know that
Based on the disturbance estimates of ESO, the control law equation (41) can be modified as

Remark 6
The stability proof process of the modified control law equation (63) is the same as equations (43)–(45), which is omitted here. But, we should notice that the constraint for

It is important to mention that from equation (53), if we select suitable ESO gains
The overall structure of the LF system with the proposed ESO-based controller in this research can be illustrated in Figure 2. The trajectory tracking errors
Choosing suitable
are satisfied and then we can conclude that the proposed ESO-based controller in this article has strong robustness and disturbance-rejection ability to make our control objective come true in poor environment conditions.

Structure of the ESO-based control system.
Simulation results
In this section, to verify the effectiveness and performance of the proposed ESO in equation (51) and the trajectory tracking control scheme in equation (63), numerical simulations are presented for a LF system with the leader specified to follow a circle orbit with a 400-km orbit altitude, and its body-fixed frame is always perfectly aligned with the orbit frame. The initial configuration and velocity of the virtual leader are expressed in

where the displacements are in kilometers, the translational velocities are in kilometers per second, and the angular velocities are in radians per second.
In the simulations, the nominal parts of the mass and inertia matrix of the leader and the follower are assumed to be identical and are chosen the same as 3

Thus, we have
The formation flying mission is the desired relative position of the follower spacecraft with respect to the leader
Initially, the follower is assumed to be performing a different flying task, with its initial states which are given as follows: the relative position of the follower in the body-fixed frame of the leader is

The time-varying bounded disturbances
In order to make our control objective come true in finite time with fine performance, the parameters of the observer equation (51) and the controller equation (63) are presented in Table 1. The numerical simulations are performed using the MATLAB software over
Control parameters for numerical simulation.

ESO: extended state observer.
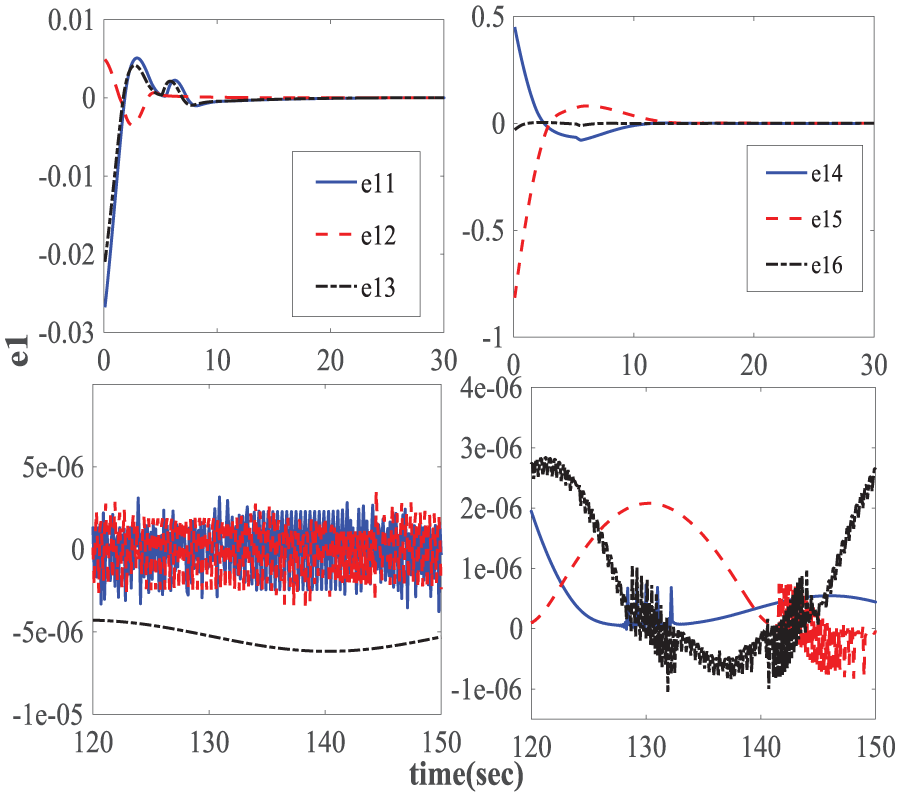
Time response of the observer errors

Time response of the observer errors

Time response of the attitude tracking errors with respect to the leader.

Time response of the angular velocity tracking errors.

Time response of the position tracking errors with respect to desired relative position.

Time response of the translational velocity tracking errors.

Control torques.

Control forces.
Figures 3 and 4 show time response of the observer errors obtained from the ESO in equation (51).
Figure 5 shows the time response of the attitude tracking errors in terms of the exponential coordinates with respect to the leader, and the angular velocity tracking errors with respect to the leader expressed in the follower’s body-fixed frame are shown in Figure 6. It can be seen that under the bounded control torques in Figure 9, the follower can track the leader’s attitude and angular velocity with a settling time less than 25 s as shown in the upper parts of these figures. Since the lower parts of these figures present the steady response, we know that the desired high tracking accuracy is achieved with the attitude tracking errors less than
Figures 7 and 8 show the time response of the relative position and translational velocity tracking errors of the follower with respect to the leader, with position tracking errors expressed by the exponential coordinates and velocity tracking errors expressed in the follower’s body-fixed frame. It can been seen that under the bounded control forces in Figure 10, the tracking errors fall to the tolerance within 100 s with the position tracking errors in steady-state less than
Figures 9 and 10 show the control torques and forces acting on the follower, respectively. Initially, large control torques and forces are required to drive the follower to the desired configuration with respect to the leader quickly. Once the consensus has been achieved, only less control energy is required to compensate the total composed disturbances and then the ideal relative configuration will be guaranteed. In these two figures, we see that the large chattering due to the use of the signum function was eliminated using the modified controller equation (63).
By the above analysis of the simulation results in Figures 3–10, we conclude that the proposed extended observer-based finite-time controller equation (63) with the control parameters in Table 1 can guarantee the ESO errors converge to a really small region with zero included, and the follower spacecraft tracks the ideal relative configuration with respect to the leader in finite time in the presence of external disturbances and model uncertainties, while meeting the constraints on the actuator output. To the best of the authors’ knowledge, it’s the first study to develop a finite-time controller based on the 6-DOF model described by Lie group SE(3) considering all the above drawbacks. While, compared with the existing literature, the chattering phenomenon has been eliminated in the novel ESO, which means the control scheme proposed in this research provides the theoretical basis for spacecraft formation control system design in practice.
Conclusion
In this article, we solved the dynamical synchronization tracking control problem of a LF system, based on the 6-DOF relative-coupled dynamics derived on Lie group SE(3) in the presence of model uncertainties, external disturbances, and input saturation. A FTSM surface was designed based on the derived relative-coupled dynamics, and then a robust control scheme was proposed to guarantee the follower tracks the relative configuration with respect to the leader in finite time. To eliminate the chattering phenomenon and reduce the conservation of the controller, a modified robust control law incorporated with the ESO was proposed. The finite-time stability of all the proposed schemes was guaranteed by Lyapunov methods. The simulation results with fine performance illustrated the effectiveness of the proposed controllers. However, communication delays are not considered in this article, based on the ideas in Wei et al.,29–31 developing the relative dynamics model via Markov jump systems and extending the result to the model will be the authors’ future work.
Footnotes
Acknowledgements
The authors thank the reviewers and the editor for their useful and constructive suggestions that helped to substantially improve the quality of this paper.
Academic Editor: Hamid Karimi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (61603115, 91438202, and 61273096), the China Postdoctoral Science Foundation funded project (2015M81455), and the Heilongjiang Postdoctoral Fund (LBH-Z15085).