
Abstract
This study proposes a novel hierarchical nonlinear proportional-integral fast terminal sliding mode (HNLPIFTSM) control for permanent magnet synchronous motor (PMSM) speed regulation system. A new type of sliding surface called HNLPIFTSM surface, which combines the benefits of a nonlinear proportional-integral (PI) sliding mode surface and a fast terminal sliding mode (FTSM) surface, is proposed to enhance the robustness and improved the dynamic response, whilst preserving the great property of the conventional hierarchical fast terminal sliding mode (HFTSM) control strategy. The proposed HNLPIFTSM surface uses the novel nonlinear PI sliding mode surface as its inner loop and uses the FTSM surface as its outer loop. Meanwhile, an extended state observer (ESO) is used to estimate the uncertain terms of the PMSM speed regulation system. Furthermore, the stability of the closed-loop control system under the ESO and the HNLPIFTSM control strategy is proved by the Lyapunov stability theorem. Finally, the simulations and experimental demonstrations verify the effectiveness and superiorities of our proposed HNLPIFTSM control strategy over the conventional HFTSM control strategy.
Keywords
Introduction
Sliding mode (SM) control strategy is a common robust control method, which was proposed by former Soviet scholars in the 1950s. The sliding mode variable structure control system based on the SM control has strong robustness and anti-interference to uncertain system, and the control strategy is simple and easy to realize, which has been widely in practical applications.1–3
The inherent chattering problem of sliding mode variable structure seriously limits the application of SM control strategy in practical engineering. In the meantime, in the face of complex control problems, it is difficult to achieve efficient control effect by using traditional SM control strategy. Hence, compound SM control methods are effective measures for such requirements. In recent years, in order to improve the control effect of uncertain systems, many scholars have studied various composite SM control strategies, such as fractional order SM control,4,5 adaptive SM control,6–9 passivity-based SM control, 10 mode-free SM control,11,12 fuzzy SM control,13,14 event-triggered SM control,15–17 backstepping SM control, 18 and hierarchical SM control. Since the hierarchical SM control strategy not only eliminates the chattering issue but also increases the control precision of the system. To the best of our knowledge, as a high-order SM control algorithm, the hierarchical SM control strategy has been widely studied by many scholars. Qian et al. 19 proposed a hierarchical SM control for a class of SIMO under-actuated systems. Shao et al. 20 developed a hierarchical SM control strategy with an adaptive disturbance observer was designed for a linear motor positioner. Wang et al. 21 presented a hierarchical SM control strategy with a proportional integral derivative fractional order sliding mode control for cable driven manipulators.
A fast terminal sliding mode (FTSM) control strategy was first proposed by Yu and Man 22 Because of its superior performance, the FTSM control strategy has been widely used in permanent magnet in-wheel motor, 23 nonlinear uncertain mass-spring system, 24 gantry cranes, 25 second-order underactuated systems, 26 and so on. In the conventional approach, the hierarchical SM control strategy was motivated to eliminate the chattering of the conventional SM control strategy. However, since the great properties of both hierarchical SM control strategy and FTSM control strategy, there is a desire to combine the benefits of both to obtain defined finite time convergence, chattering elimination and strong robust simultaneously. Abolvafaei and Ganjefar 27 and Liu et al. 28 combined the FTSM surface with a linear sliding surface is used to design the hierarchical FTSM control strategy. By using the strategy, the advantages of two sliding mode surfaces can be obtained simultaneously. However, the conventional linear sliding mode surface also has the disadvantages of simple and rough signal processing. To overcome the issue, a novel nonlinear PI sliding mode surface is designed in this article.
Gao 29 proposed a linear Extended State Observer (ESO). Because of its simple structure and high estimation efficiency, the linear ESO has been widely used in many applications such as networked multi-axis servo system, 30 networked interconnected motion system, 31 unmanned powered parafoil, 32 three-dimensional elastic wing, 33 and so on.
Permanent magnet synchronous motor (PMSM) speed regulation system is a typical uncertain system due to its own parameter uncertainty and external load disturbance. Recently, PMSM has been widely used in many industrial applications. Meanwhile, the control of PMSM speed regulation system is a challenging task because of the uncertain system. Many scholars have applied many advanced control strategies to the control of the uncertain systems.34–41
Motivated by the above analysis and previous studies, a novel hierarchical nonlinear proportional-integral fast terminal sliding mode (HNLPIFTSM) control strategy is proposed for the PMSM speed regulation system in the present work. A novel type of sliding mode surface called HNLPIFTSM surface, which combines the benefits of the nonlinear proportional-integral (PI) sliding mode surface and the FTSM surface, is proposed to enhance the robustness and improved the dynamic response. The proposed HNLPIFTSM surface uses the nonlinear PI sliding mode surface as its inner loop and uses the FTSM surface as its outer loop. Meanwhile, a linear ESO is used to estimate the uncertain terms of the PMSM speed regulation system. The stability of the closed-loop control system under the linear ESO and HNLPIFTSM control strategy is proved using the Lyapunov stability theory.
Through comparisons with the existing studies, our contributions of this article are further highlighted as follows.
In order to improve the dynamic response speed and anti-disturbance ability, a nonlinear PI sliding mode surface is designed.
The combination of the FTSM surface with the nonlinear PI sliding mode surface is used to design a novel HNLPIFTSM control strategy.
The effectiveness and superiorities of our ESO based the HNLPIFTSM control strategy are proved by the comparative simulations and experimental demonstrations.
The remaining parts of this paper are arranged as:
In Section 2, some important knowledge of the mathematical model of PMSM are briefly presented. Control strategies and stability analysis are given in Section 3. the simulations and experimental demonstrations are shown in Section 4. Finally, Section 5 concludes the study.
Problem description
The torque equation of PMSM is first described as follows: 42

where
When

where

where
The error equation of the PMSM speed regulation system is given as:

where
Control strategies and stability analysis
Control strategies designed
The traditional linear sliding mode surface as the inner loop is selected as:

where
Based on the FTSM control strategy, 22 the following FTSM surface as the outer loop is proposed as:

where
In order to resist the occurrence of uncertain interference, the following reaching law is applied:

where

According to (7), (8), and (9), one can obtain:

By substituting (6) into (10), one has:

By substituting (4) and (5) into (11) gives:

According to (12), the traditional HFTSM control input is defined as:
In this paper, a nonlinear PI sliding mode surface as the inner loop is defined as: 43

where the nonlinear function

where
Combining (7), (8), and (14), we have:
Substituting (4) and (5) into (16) yields:

According to (17), the proposed HNLPIFTSM control input is designed as:

In this subsection, the stability of the proposed HNLPIFTSM control strategy will be discussed.
The Lyapunov function for the proposed HNLPIFTSM control strategy is selected:

By substituting (14) into (7), we can get:

Then, substituting the proposed HNLPIFTSM control input (18) into (20), the following equation can be obtained.

According to (19) and (21), we can get:

According to the Lyapunov criterion, the FTSM surface as the outer loop can reach zero. Then, the FTSM surface satisfies the following condition.

When chosen

where
When the nonlinear PI sliding mode surface reach zero in finite time, the novel nonlinear PI sliding mode surface can be written as:

Let

Then

where
Linear ESO designed
The motion equation of PMSM can be expressed as:

where
Then, the linear ESO was designed as: 29

where
According to the previous studies, 44 the stability of the linear ESO will be discussed.
The linear ESO (29) can be rewritten as:

Equation (30) can be written as:

where


According to (31), (32), and (33), the stability of system can be guaranteed.
So, we can get:

Therefore, the linear ESO exhibits stability.

By substituting (35) into (20), we can obtain:

where
Inspired by previous articles,45,46 the stability of the proposed HNLPIFTSM control strategy with the linear ESO will be discussed. The Lyapunov function for the proposed HNLPIFTSM control with the linear ESO is selected:

Taking derivative of both sides of the equation (37), it can be shown as:

Assumption 1: The following condition is assumed for analysis in the paper.

where
According to (39), we know that
A novel field oriented control (FOC) of the PMSM speed regulation system based on the proposed HNLPIFTSM control strategy (18) with the linear ESO (29) is given in Figure 1.

The block diagram of the PMSM speed regulation system based on the proposed HNLPIFTSM control strategy with the ESO.
Comparative simulations and experimental demonstrations
In order to verify the effectiveness and superiorities of our proposed HNLPIFTSM control strategy over the conventional HFTSM control strategy, the FOC of the PMSM speed regulation system based on different control strategies are constructed in this paper.
Table 1 shows the key parameters of the PMSM in the simulation. The selected parameters of the ESO are given as:
Parameters of the PMSM.

Parameters selected of the traditional HFTSM control strategy.

Parameters selected of the proposed HNLPFTSM control strategy.

The dynamic response of rotational speed is first used for comparison in the simulation. Figures 2 to 5 show the rotational speed response curves under the different control strategies, respectively. To better compare the control performance of various controllers at different speeds, the reference speed is set to 30 and 60 rpm, respectively. Based on different control schemes, the actual speed response of the PMSM without load starting are compared in Figures 2 and 3, respectively. Based on different control schemes, the actual speed response of the PMSM with

(a) Actual speed response under the traditional HFTSM control strategy without load when the reference speed is set at 30 rpm and (b) actual speed response under the traditional HFTSM control strategy without load when the reference speed is set at 60 rpm.

(a) Actual speed response under the proposed HNLPIFTSM control strategy without load when the reference speed is set at 30 rpm and (b) actual speed response under the proposed HNLPIFTSM control strategy without load when the reference speed is set at 60 rpm.

(a) Actual speed response under the traditional HFTSM control strategy with

(a) Actual speed response under the proposed HNLPIFTSM control strategy with
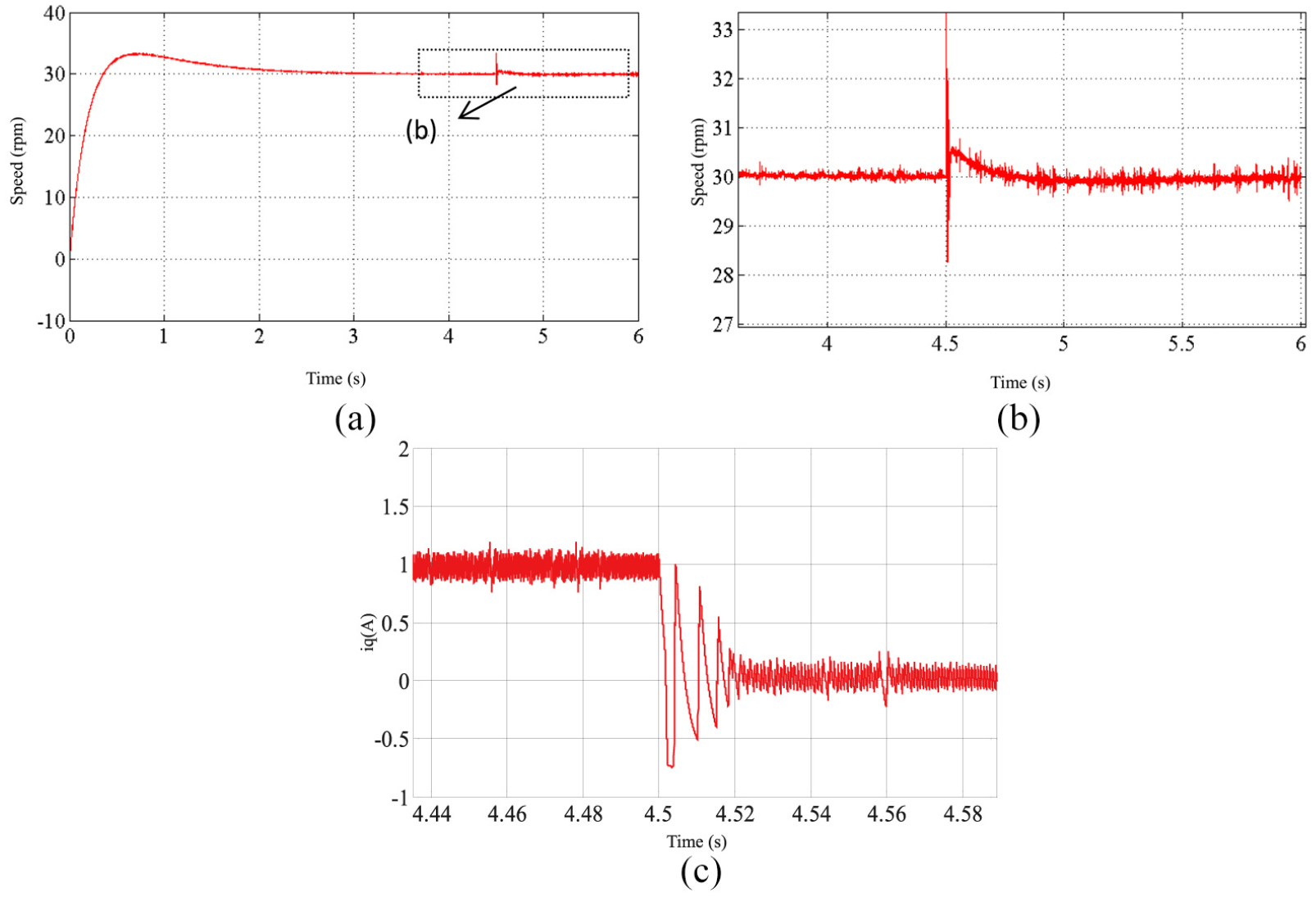
In the following article, an external load with step change is used to demonstrate the anti-disturbance capability of the proposed HNLPIFTSM control strategy. The reference speed is set to 30 rpm. In Figures 6 and 8, the external load suddenly becomes 1

(a) Actual speed response curve under the traditional HFTSM control strategy when sudden increases 1

(a) Actual speed response curve under the proposed HNLPIFTSM control strategy when sudden increases 1
The comparison of robustness under the traditional HFTSM control strategy and the proposed HNLPIFTSM control strategy.

(a) Actual speed response curve under the traditional HFTSM control strategy when sudden decreases of 1

(a) Actual speed response curve under the proposed HNLPIFTSM control strategy when sudden decreases of 1
In this subsection, we will further validate the effectiveness and superiority of our proposed HNLPIFTSM control strategy. A PMSM speed control experimental platform based a cSPACE (Control signal process and control engineering) is used in this paper, which is shown in Figure 10. The cSPACE PMSM speed control experimental platform consists of a SM060R20B30M0AD PMSM, a MY1016 DC Generator, a diver experiment box with TI TMS320F28335 DSP and a Matlab/Simulink software. The key parameters of the proposed HNLPIFTSM control strategy in the experiment are given as:

The PMSM speed control experimental platform based cSPACE.
When the reference speed is set to the same value, the performances of the traditional HFTSM control strategy and the proposed HNLPIFTSM control strategy are showed in Figure 11. It can be seen from Figure 11 that the experimental demonstrations verify the excellent speed tracking performance of the proposed HNLPIFTSM control strategy.
(a) The experimental speed response under the traditional HFTSM control strategy and (b) the experimental speed response under the proposed HNLPIFTSM control strategy.
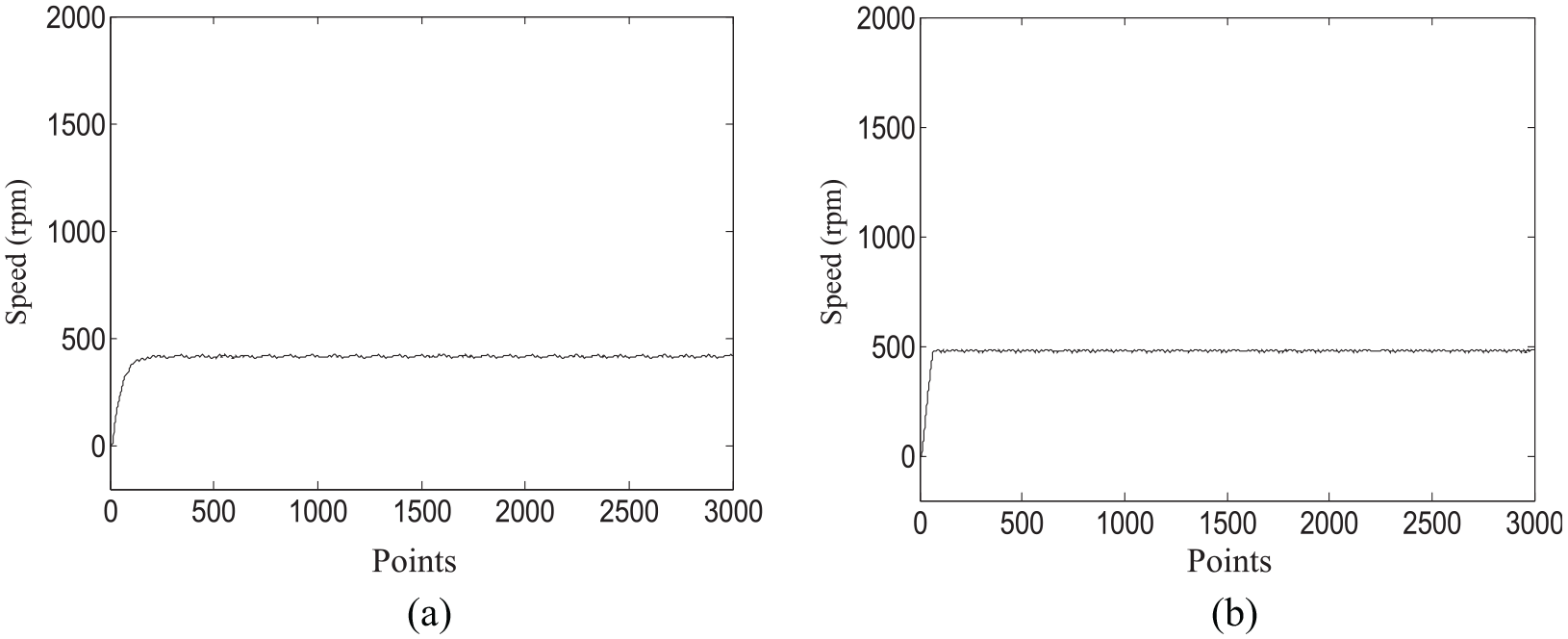
When the reference speed is set to 100 rpm and the external load is changed from no load to load suddenly, the performances of the traditional HFTSM control strategy and the proposed HNLPIFTSM control strategy are showed in Figures 12(a) and 13(a), respectively. When the reference speed is set to 100 rpm and the external load is changed from load to no load suddenly, the performances of the traditional HFTSM control strategy and the proposed HNLPIFTSM control strategy are showed in Figures 12(b) and 13(b), respectively. Such Figures show that the proposed control strategy has the superior kinematics and strong anti-disturbance ability of load disturbance. In summary, the experimental demonstrations verify the excellent speed tracking performance and robustness of the proposed HNLPIFTSM control strategy.

(a) The experimental speed response under the traditional HFTSM control strategy when the external load is changed from no load to load suddenly and (b) the experimental speed response under the traditional HFTSM control strategy when the external load is changed from load to no load suddenly.

(a) The experimental speed response under the proposed HNLPIFTSM control strategy when the external load is changed from no load to load suddenly and (b) the experimental speed response under the proposed HNLPIFTSM control strategy when the external load is changed from load to no load suddenly.
Conclusions and future work
In this paper, we propose a novel ESO based the HNLPIFTSM control strategy to obtain high performance of the PMSM speed regulation system. Firstly, a novel HNLPIFTSM surface is designed, which combines the advantages of the nonlinear PI sliding mode surface and the FTSM surface, is proposed to improved the robustness and the dynamic response, while maintaining the good performance of traditional HFTSM control strategy. The proposed HNLPIFTSM surface uses the nonlinear PI sliding mode surface as its inner loop and uses the FTSM surface as its outer loop. Meanwhile, an ESO is used to estimate the uncertain terms of the speed regulation system. Comparative simulations and experimental demonstrations verify the excellent speed tracking performance and robustness of the proposed strategy.
At present, we only use the control strategy in the middle and low speed control of PMSM. In the future work, we will further complete the application of the proposed HNLPIFTSM control strategy in the control of high speed motor.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China under Grant (no. 61703202), by the Natural Science Foundation of Universities of Anhui Province (no. KJ2020A0692) and by the Building Electrical and Intelligent Professional Excellence Engineer Training Innovation Project (no. 2020zyrc153).