
Abstract
This paper focuses on fast terminal sliding mode fault-tolerant control for a class of n-order nonlinear systems. Firstly, when the actuator fault occurs, the extended state observer (ESO) is used to estimate the lumped uncertainty and its derivative of the system, so that the fault boundary is not needed to know. The convergence of ESO is proved theoretically. Secondly, a new type of fast terminal sliding surface is designed to achieve global fast convergence, non-singular control law and chattering reduction, and the Lyapunov stability criterion is used to prove that the system states converge to the origin of the sliding mode surface in finite time, which ensures the stability of the closed-loop system. Finally, the effectiveness and superiority of the proposed algorithm are verified by two simulation experiments of different order systems.
Keywords
Introduction
Nowadays, with the rapid development of science and technology, people have designed more and more complex high-precision systems, hoping that they can replace people to perform more complex and dangerous tasks. However, due to the complexity of the operating environment and the various devices of the instrument itself, the system is likely to fail in the process of performing the task, so as to fail to complete the specified task, and even cause huge losses. In order to ensure that the fault of the system will not affect the execution of the task, fault-tolerant control emerges. The purpose of fault-tolerant control is to maintain the closed-loop stability of the system and meet certain performance indicators when the systems sensors, actuators or components fail, so as to complete the pre-specified tasks. 1 Under such background and requirements, fault-tolerant control has developed rapidly in recent years and has become one of the research hotspots in control discipline.2–4
In general, fault-tolerant control is divided into two categories: passive fault-tolerant control (PFTC) and active fault-tolerant control (AFTC). PFTC is developed from robust control, which does not require fault detection and diagnosis (FDD) module. When a fault occurs, it does not need to change the control law, and is insensitive to the fault by relying on the robustness of the system. 5 Although the design of this method is simple, it needs to know some prior knowledge of the fault, and the controller design is too conservative. Correspondingly, AFTC requires the FDD module to provide fault information, and then achieve the purpose of fault tolerance by adjusting the control law or controller structure. 6 Obviously, for nonlinear systems with multiple uncertain factors, AFTC is more flexible and can achieve better control effects. 7
After years of development, fault-tolerant control has integrated many advanced control methods, such as adaptive control,8,9 neural network control, 10 fuzzy control, 11 sliding mode control, 12 and so on. Among them, sliding mode control is widely used in fault-tolerant control of various systems because of its robustness to system uncertainty and insensitivity to system parameter perturbation. A passive sliding mode fault-tolerant control method for the quadrotor UAV is proposed in Merheb et al. 13 However, it needs to know the fault boundary, so its application is limited in practice. Yang et al. 14 proposes an adaptive sliding mode fault-tolerant control for uncertain time-delay systems, it adjusts the control gain through the adaptive law, so as to ensure the stability of the system when a fault occurs. For fault-tolerant control of the manipulator, a time-delay observer is used to detect faults. 15 However, the observer error threshold needs to be set manually, which depends on the operator’s experience. In Pan et al., 16 an adaptive backstepping control is used for fault-tolerant compensation control of the active suspension system. It can achieve arbitrarily small tracking error in the presence of nonlinear actuators with random failures.
In recent years, terminal sliding mode has become a hot research issue in sliding mode control. By selecting a nonlinear sliding mode surface, the system state error can reach the equilibrium point in a finite time, and it has faster response speed, higher accuracy and better robustness compared with the traditional sliding mode surface. 17 However, in the traditional terminal sliding mode control, when the system state error is close to zero, the convergence rate of terminal sliding mode is slower than that of linear sliding mode, so the convergence time is not globally optimal. For this reason, Pan et al. 18 proposed the global fast terminal sliding mode control to achieve the whole-process optimization of the convergence time. Due to the chattering problem of terminal sliding mode control, the adaptive high-order terminal sliding mode control is adopted in Ahmed et al., 19 and the switching function is incorporated into the derivative of the control law, which significantly reduces the chattering. However, due to the singularity of the control law caused by the traditional terminal sliding surface, Divandari et al. 20 uses the full-order terminal sliding surface, so as to avoid the singularity of the control law.
However, most of the above fault-tolerant control algorithms only apply to second-order systems, while they are not applicable or difficult to apply to higher-order systems. 21 In practical application, it is not accurate to describe many systems only by second-order systems. Therefore, there needs to study fault-tolerant control methods for higher-order systems to solve problems in practical applications. In Asl et al., 22 Asl RM et al. proposed an integral terminal sliding mode control method for n-order systems, which improved the application scope of the control algorithm.
According to the author’s knowledge, there are few researches on terminal sliding mode fault-tolerant control of high-order systems, which can achieve global fast convergence, non-singularity and chattering suppression at the same time. Inspired by the above work, this paper proposes a fast terminal sliding mode control method for a class of n-order nonlinear systems which can be described by equation (1), such as quadrotor UAV, 13 manipulator, 22 servo-hydraulic system, 22 etc. Compared with the existing work, the contributions of this paper are as follows:
The ESO is used to estimate the lumped uncertainty and its derivative of the system, so as to realize the compensation of the lumped uncertainty, including the fault terms. It is not necessary to know the fault boundary in advance, nor to set the error threshold of the observer, which improves the practicability of the fault-tolerant algorithm.
A new fast terminal sliding mode surface is designed, which combines the characteristics of high-order terminal sliding mode surface and full-order terminal sliding mode surface. The global convergence process is faster than that of the linear sliding surface, and the singularity is limited to the first derivative of the control signal to avoid the singularity of the control signal. In addition, the switching term is added to the derivative of control law, which greatly reduces the chattering.
The controller is designed for the n-order system, which makes it applicable to many systems in real life and expands the application scenarios of the control method.
The rest of this paper is as follows: the second part describes the system and some preliminary knowledge. In the third part, the ESO and the fast terminal sliding mode controller were designed as well as providing the stability analysis. The fourth part provides simulation experiments of two different order systems to prove the validity of the algorithm. Finally, in the fifth part, some conclusions of this study are given.
Problem statement
Consider the following nonlinear system of order n with actuator fault:
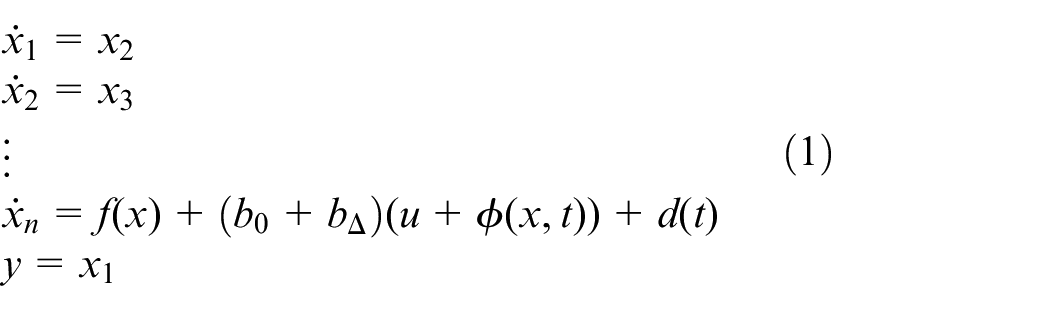
Where
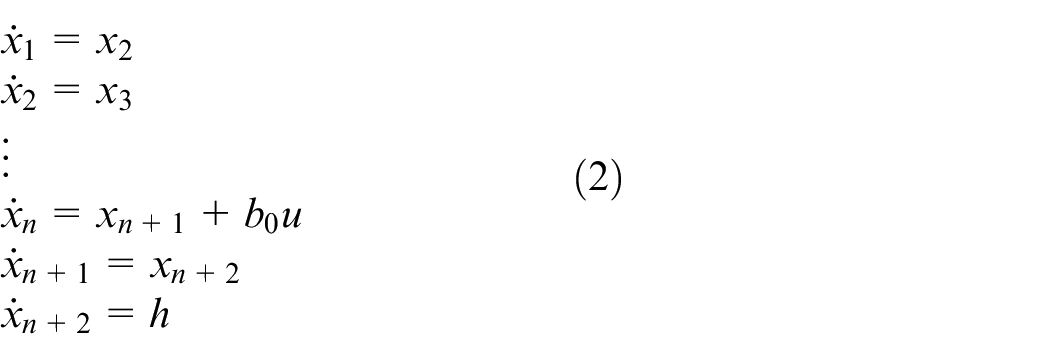
Under assumption 1, equation (1) can be rewritten as follows:

Then, for any given

This study proposes an observer-based fast terminal sliding mode fault-tolerant scheme for a class of nonlinear systems with actuator faults and unknown states. An ESO is proposed to estimate unknown states, which is the basis of the design of controller. And a novel fast terminal sliding mode controller is designed to achieve global fast convergence, avoid the singularity and suppress the chattering of the control law. Figure 1 shows the control diagram.
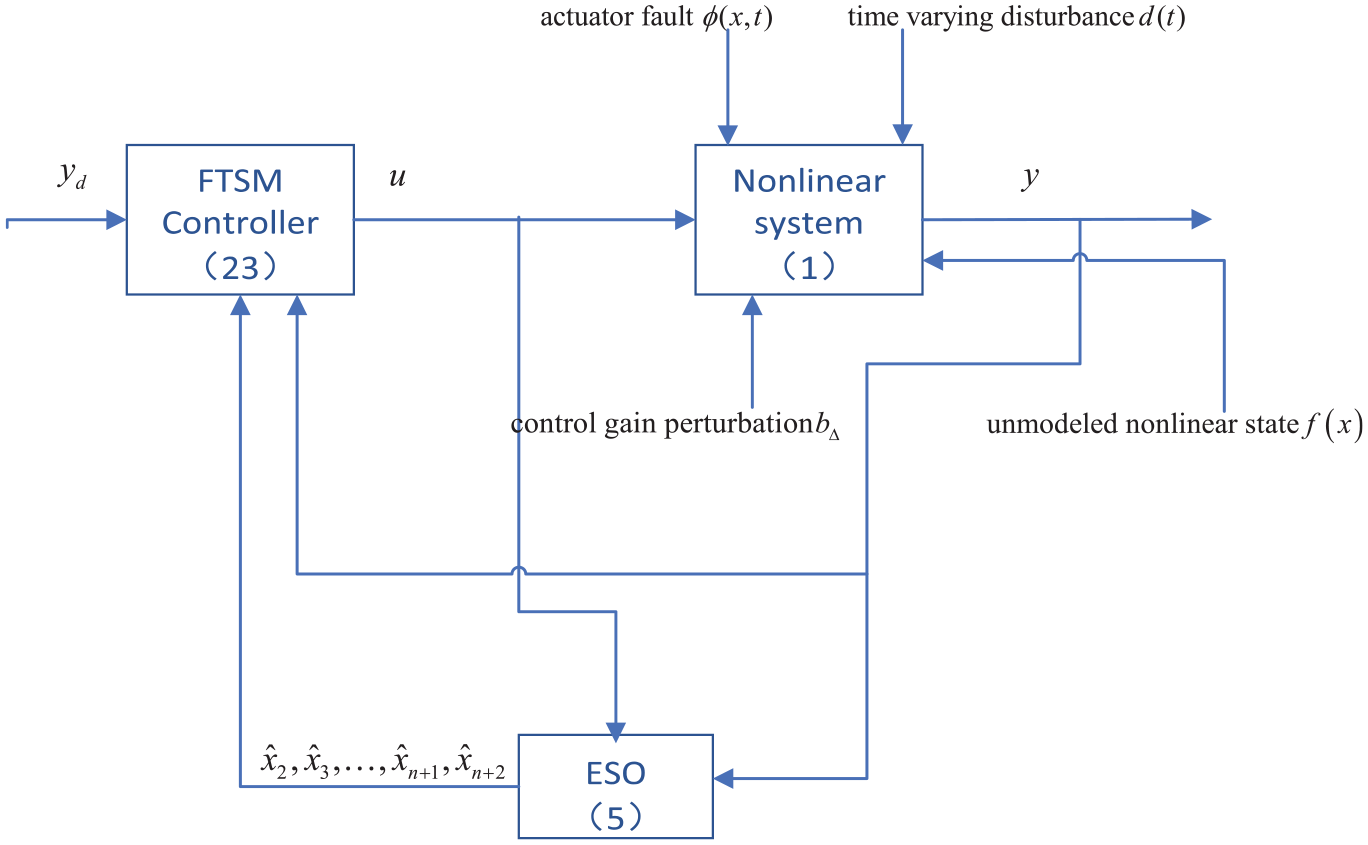
Proposed control scheme diagram.
Main works
Design and convergence analysis of ESO
For system (2), in order to estimate the states of the system which cannot be obtained from the output and the extended state defined by Assumption 1, inspired by Pan et al., 24 an ESO is designed as follows:
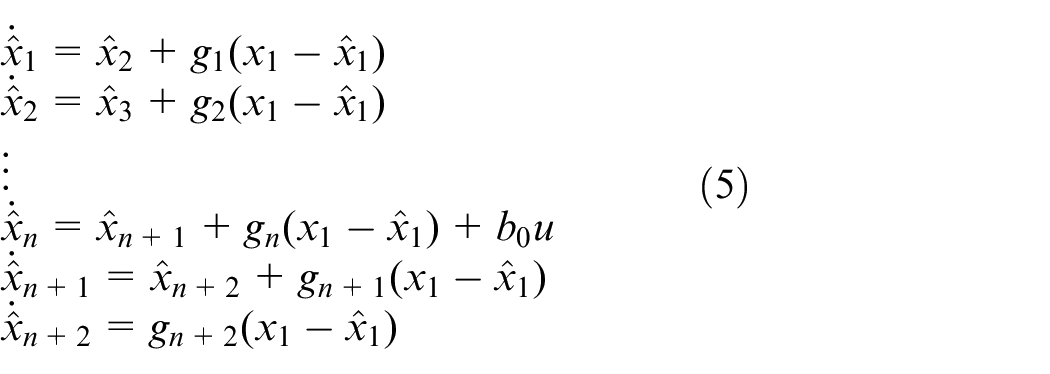
Where

with

Where

where

for all

denote
For

From (10) we get

So

Where

Let

for

Where
Fast terminal sliding mode control
For system (1), define the following error variable and its derivatives:
Let

Where

Define
The fault-tolerant control law is designed as follows

Where
Take the derivative of equation (20) and consider (22), (24), we get

Substitute (23) into (25), we obtain

Differentiating

Where
Simulation results and discussion
In this section, we first take the Qdrone quadrotor UAV developed by Canada’s Quanser company as the research object.
26
Qdrone has six degrees of freedom variables, including position variable
Where
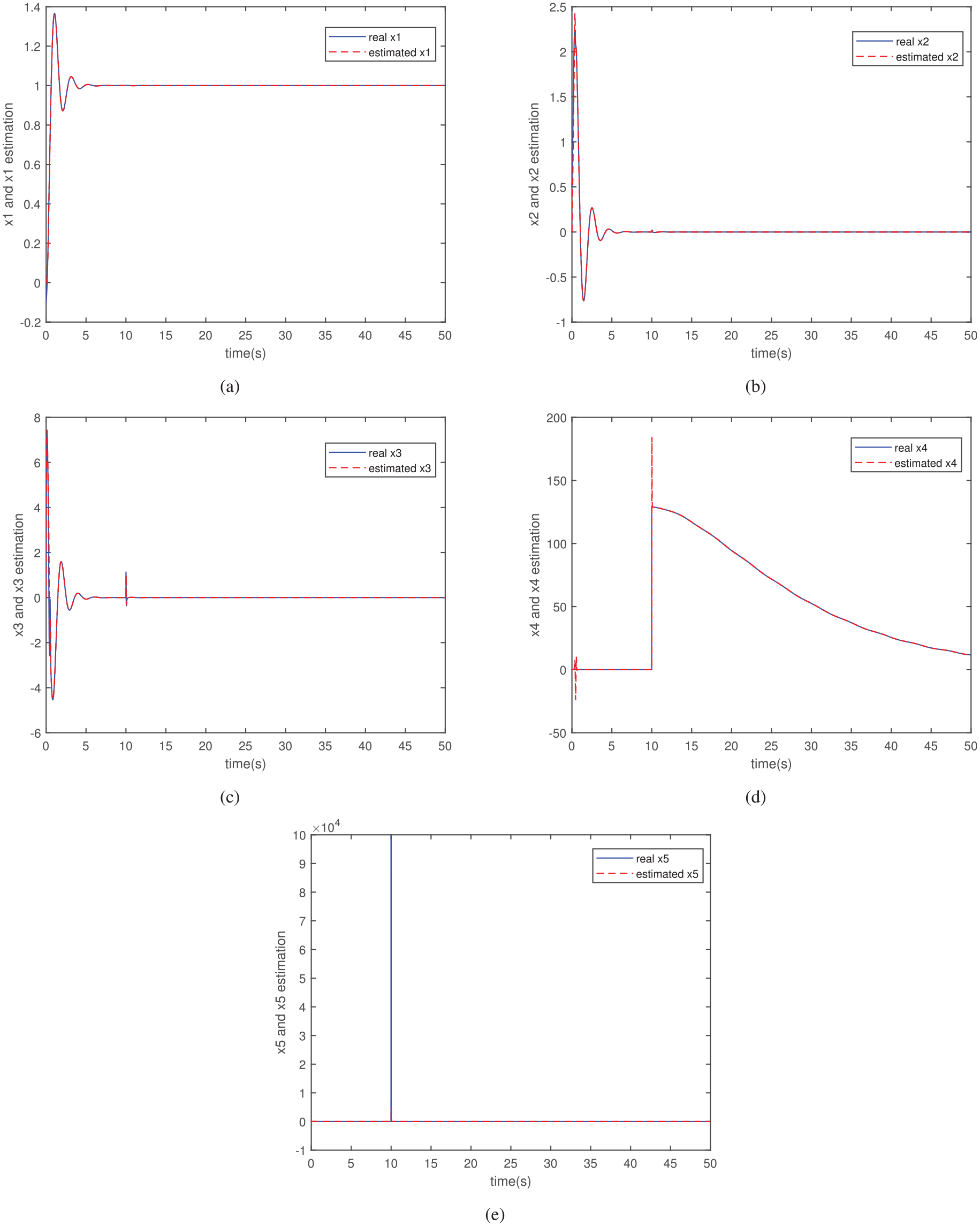
Firstly, the estimation effect of ESO for position, velocity, lumped uncertainty and its derivative is verified. The simulation results are shown in Figure 2.
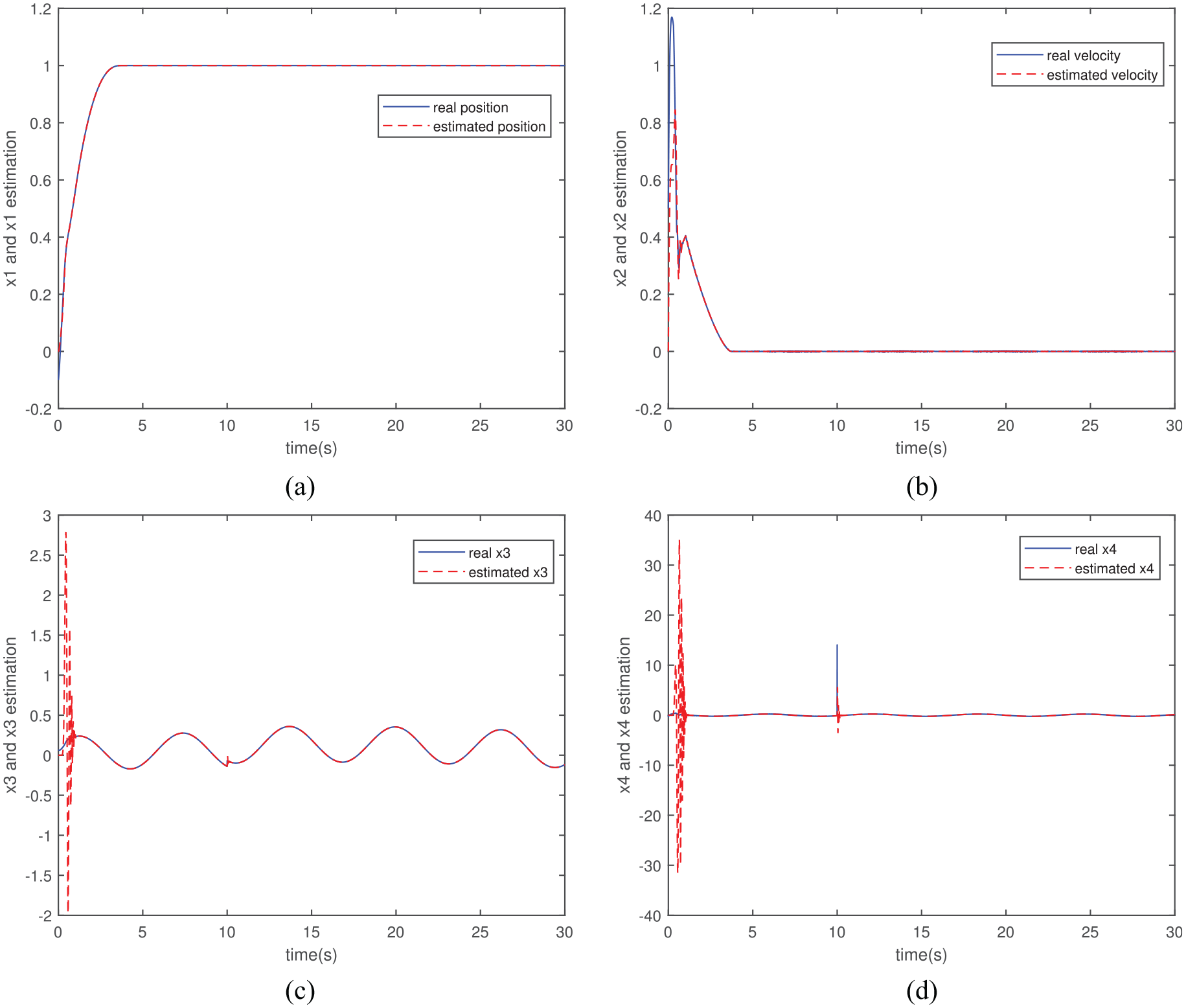
Estimation effect of ESO.
From Figure 2, it can be seen that the estimation values of the position, velocity, lumped uncertainty and its derivative of the system fit the real value rapidly. The velocity, lumped uncertainty and its derivative of the UAV can be estimated accurately only by the measured position information output. Besides, formula (18) is used to reduce the peak problem caused by the initial value error of the observer. When the fault occurs at t = 10 s, the lumped uncertainty and its derivative have changed greatly, ESO can also quickly and accurately estimate the lumped uncertainty and its derivative after the fault term is added, so as to avoid the control performance reduction due to the fault detection being not timely.
Integrate the information estimated by ESO into fault-tolerant control law, and to highlight the superiority of this algorithm, the proposed method is compared with an integral terminal sliding mode fault-tolerant control (ITSMC) in Asl et al.,
22
the parameters of the controller are properly selected as
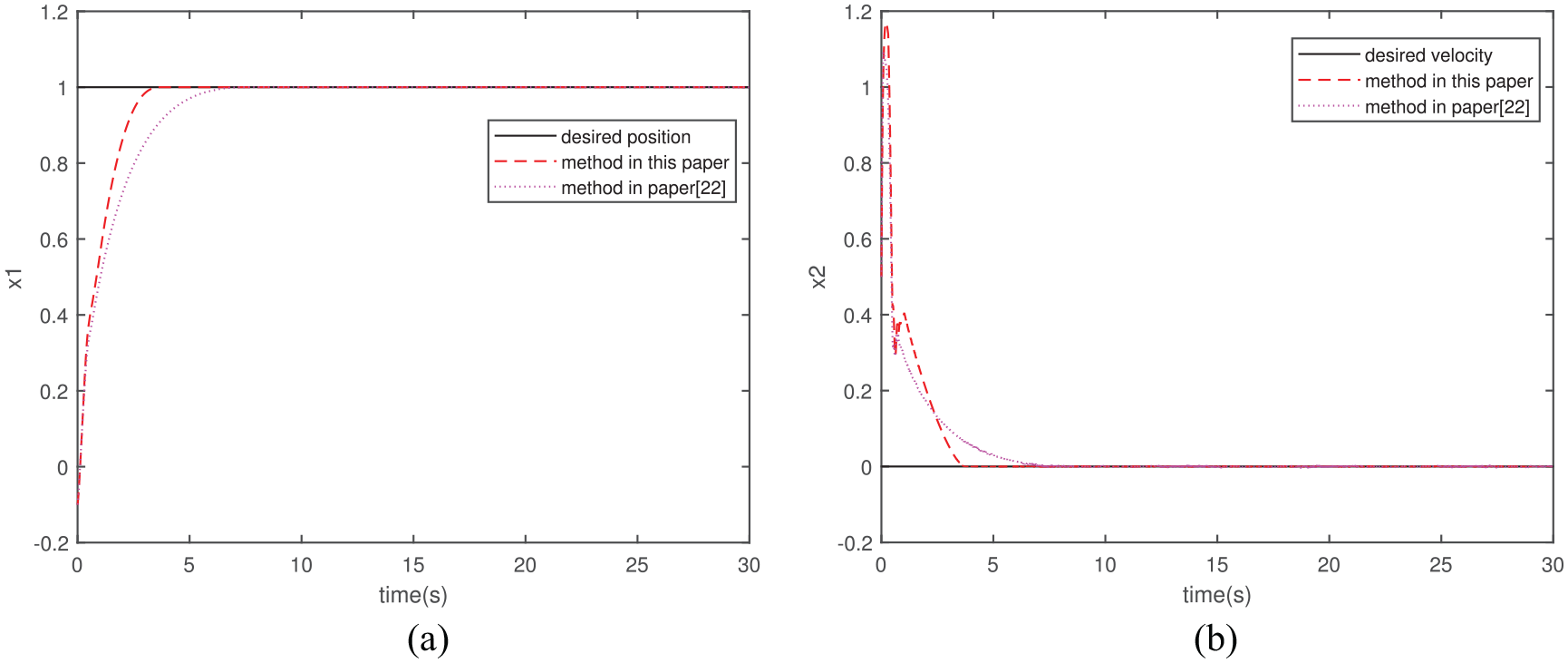
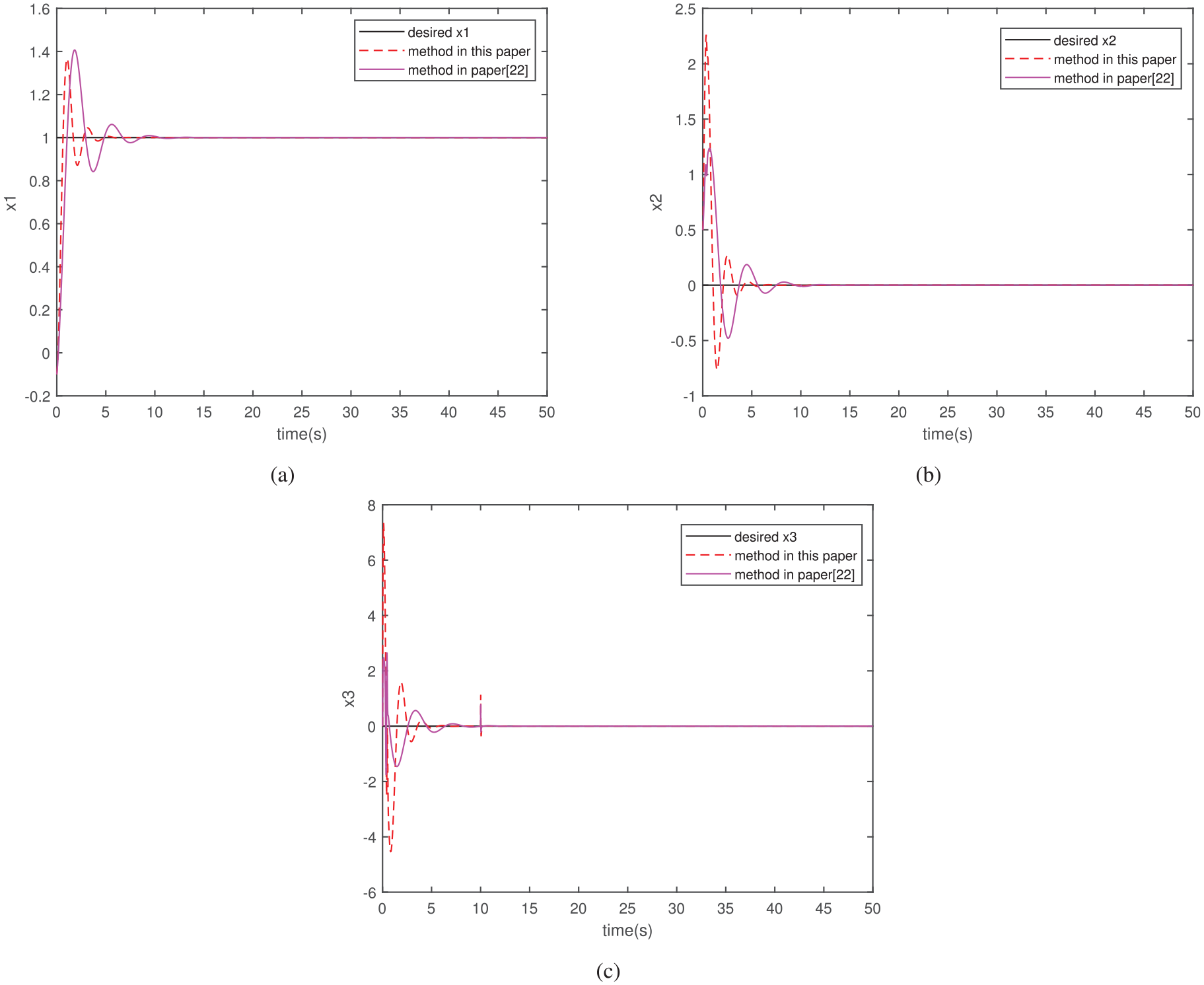
State trajectory
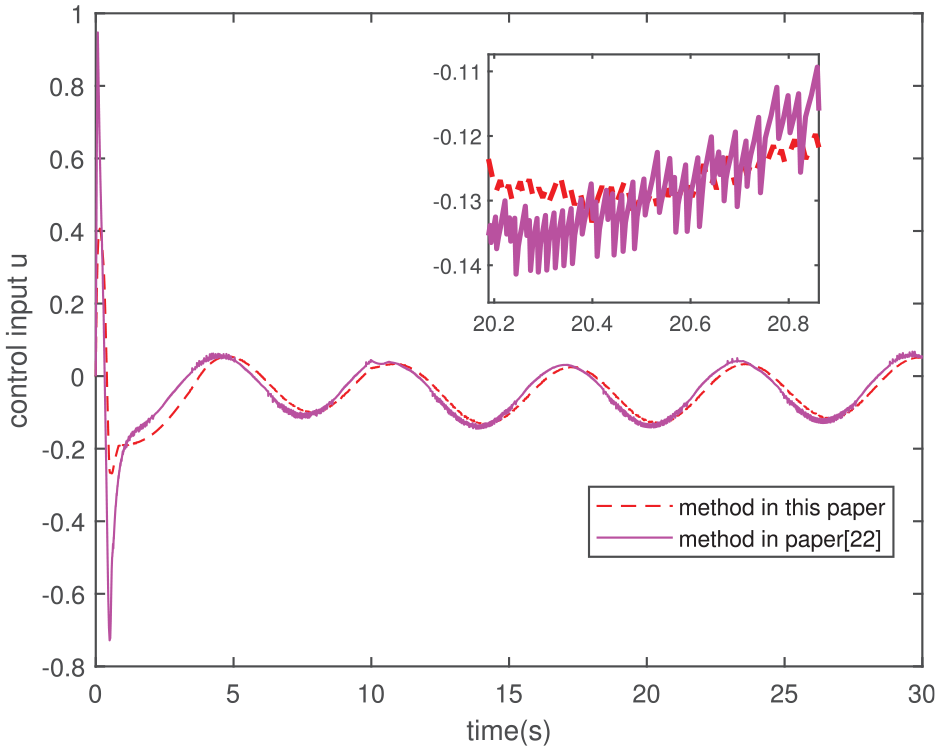
Control input u.
Performance comparison of two methods for second-order UAV system.
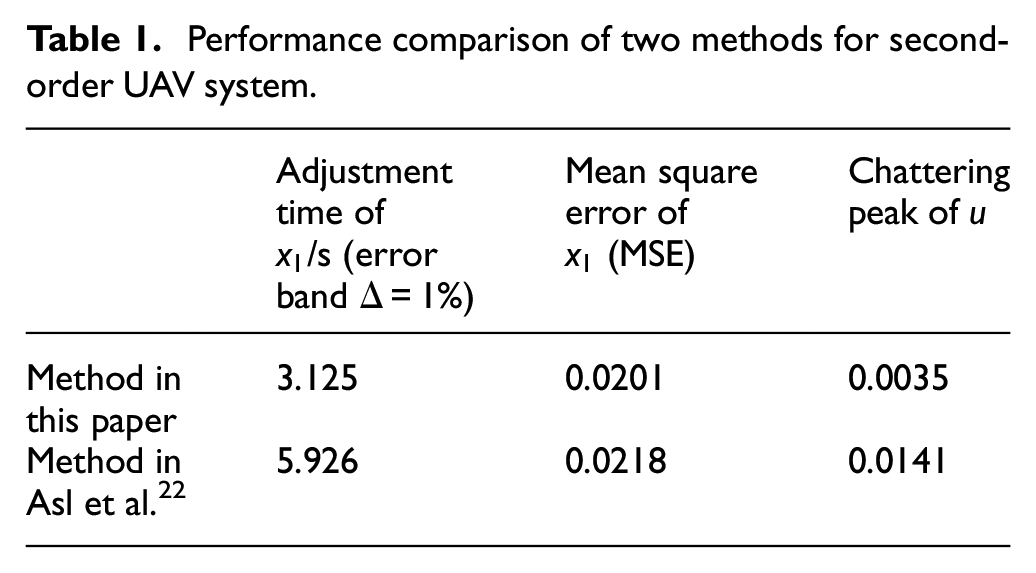
In the X-direction position tracking in Figure 3(a), both of the two algorithms can achieve the convergence of position error in finite time, even in the case of a sudden failure in t = 10 s. However, because the sliding surface designed in this paper is global fast convergence, compared with the algorithm in Asl et al., 22 the system response is faster and the position signal can be tracked more quickly and more accurately, as can be seen from adjustment time and MSE in Table 1. In Figure 3(b), the method designed in this paper makes the actual speed converge to zero in a shorter time, which shows that our method is superior in rapidity. It can be seen that the proposed method is more robust to unmodeled state, gain perturbation, time-varying disturbance and fault term.
In Figure 4, the chattering of the control law in this paper is 75% lower than that of the Asl et al., 22 and the control curve is smoother. This is mainly because the switching term in the control law is included in the first derivative of the control signal, and ESO accurately estimates the lumped uncertainty and its derivative before and after the fault, so the control signal can more accurately compensate the nonlinear term, control gain perturbation, disturbance and fault. Thus, the system state can be kept in the desired position stably, so as to reduce the chattering of the control law and improve the control quality.
To prove the applicability of the proposed algorithm for higher-order systems, the following third-order Genesio chaotic system 27 is considered:

Where
Estimation performance of ESO.
State trajectory
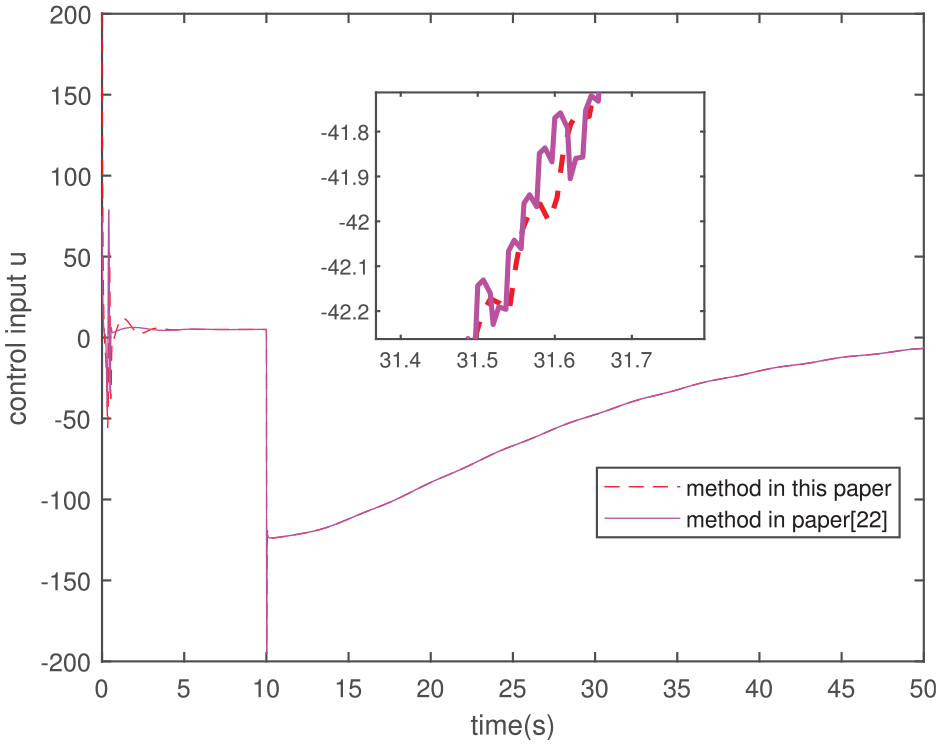
Control input u.
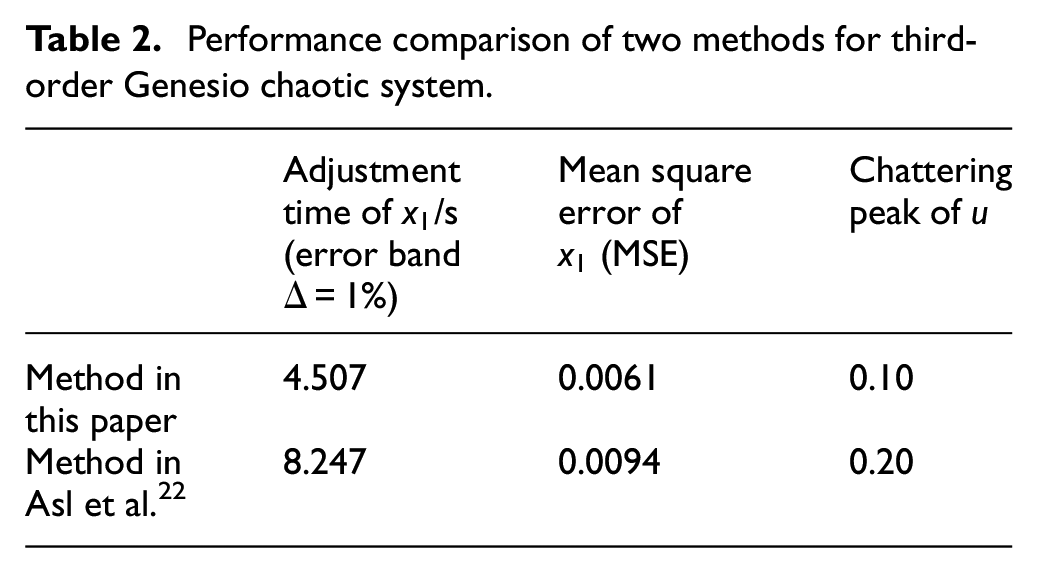
Performance comparison of two methods for third-order Genesio chaotic system.
As can be seen from Figure 5, for the third-order system, the designed observer can still accurately estimate the state variables
After obtaining the state estimation values, the control law (23) is applied to the system (29) to obtain the system state trajectory and control signal, as shown in Figures 6 and 7.
In Figure 6, the state trajectories of both methods can tend to the expected value in a limited time, and even after the fault, the final stability will not be affected. Compared with ITSMC, the adjustment time of
Conclusion
In this paper, a fast terminal sliding mode fault-tolerant control is proposed for a class of nonlinear n-order systems. Considering that the passive fault-tolerant control needs to know the fault boundary and the time-delay observer needs to set the fault detection threshold artificially, this paper uses extended state observer to estimate the lumped uncertainty and its derivative, without obtaining the fault bound in advance, nor setting the threshold of fault detection, which improves the usability of the algorithm. In addition, a fast terminal sliding mode controller is designed to ensure the whole process’s fast convergence, non-singularity and chattering suppression. Finally, the system considered in this paper is n-order, so it is applicable to many practical systems, the application of the control algorithm is extended. The simulation results of the second-order UAV system and the third-order Genesio chaotic system prove the effectiveness and superiority of the proposed algorithm. In the future, we will carry out physical experiments to verify the performance of the controller. Besides, considering both actuator fault and sensor fault is also one of the future research directions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Science Key Lab Fund Project (6142605200402), the National Natural Science Foundation of China (61922042) and the Fundamental Research Funds for the Central Universities (NJ2020004).