
Abstract
In this article, the attitude control problem of a new-designed aerial trees-pruning robot is addressed. During the tree cutting process, the aerial trees-pruning robot will be disturbed by unknown external disturbances. At the same time, the model uncertainties will also affect the attitude controller. To overcome the above problems, an attitude controller is designed with a nonsingular fast terminal sliding mode method. First, the extended state observer is designed to estimate the modeling uncertainties and unknown disturbances. Then, the extended state observer-based nonsingular fast terminal sliding mode controller can make the tracking error of the attitude converge to zero in a finite time. Finally, a control allocation matrix switching strategy is proposed to solve the problem of the change of the aerial robot model in the cutting process. The final simulation and experimental results show that the extended state observer-based nonsingular fast terminal sliding mode controller designed in this article has good attitude control performance and can effectively overcome the modeling uncertainties and unknown disturbances. The attitude controller and control allocation matrix switching strategy ensure that the attitude angles of the aerial robot can quickly track the reference signals.
Keywords
Introduction
Currently, the tree barrier cleanup tasks, near the high-voltage lines, are almost conducted by man with simple tools. 1,2 Moreover, the tree barrier cleanup task, especially in complex environments, has brought great challenges to staff who are responsible for the tree barrier cleanup. Therefore, this is still a tough problem that power companies have been trying to solve.
Some aerial trees-pruning robots-based solutions have been proposed to address this problem. Molina and Hirai designed a multirotor helicopter equipped with skew-gripper to prune the tree branch with a circular saw. 3 Azami et al. designed an aerial robot with hanging cutter designed to prune trees near the power lines. 4 However, most of these aerial robots usually suffer from low efficiency and short duration. To solve the above problems, an aerial tree-pruning robot that has a new structure is designed and introduced in this article. The new-designed aerial trees-pruning robot equipped with saw cutter can cut out the branches near the power line. Moreover, the aerial trees-pruning robot is suitable for implementing fast-cleaning in the way of “shaved head” from the side to the inside branches. At the same time, the aerial trees-pruning robot can be competent for more complex and changeable terrain. Its high mobility and flight stability also ensure the efficiency and safety of tree barrier clearing.
The corresponding control method for the new-designed aerial trees-pruning robot is another contribution of our work. The aerial trees-pruning robot needs to carry different types of tools when performing different tree barrier cleaning tasks which result in the uncertainty of the body’s inertia. Furthermore, the contact between the aerial robot and the trees during the cutting operation causes the dynamic model parameters of the aerial robot to change. To accomplish the predetermined task of tree barrier cleaning, it is necessary to solve the attitude stabilization control problem. In the past decades, with the rapid development of sensing technology and mechatronics technology, great progress has been made in the research and development of attitude stabilization control for aerial robots. Moreover, various control methods have been developed for the attitude stability and control of the aerial robot. The control algorithm based on machine learning 5,6 is difficult to use in complex unknown environments because it relies on repetitive training.
The main advantage of the linear quadratic regulator (LQR) method 7 –9 is that the optimal control input is obtained from the full-state feedback of the system by solving the Riccati equation. However, for the general system, it is difficult to obtain the analytical solution of the Riccati equation. At the same time, the LQR method has higher requirements on the accuracy of the system model and the control performance of the parameter uncertain system is poor, which limits the application of the LQR method in practice. Therefore, in practical engineering applications, control algorithms such as classical proportional–integral–derivative (PID) controller, 4,10 integral backstepping controller, 11 and sliding mode 12,13 still play an important role.
The controller, which is designed by classical methods such as PID, has the disadvantage of poor robustness when the system model deviates from the equilibrium point or has a strong external disturbance, the control performance will not be guaranteed. At the same time, the change of model parameters will lead to the deterioration of the controller performance, so the controller must be adjusted to meet the performance requirements of the controller under different model parameters. Considering the uncertainty of the inertia matrix and the external disturbance caused by contact operation, the above methods are difficult to meet the control requirements of the aerial trees-pruning robot.
Sliding mode control makes the state of the system slide on the sliding mode surface and eventually reaches the equilibrium point by changing the internal feedback control structure of the system. 14,15 It has strong robustness to the uncertainty of model parameters, model errors, and external disturbances. However, ordinary sliding mode controllers cannot make the system state error converge to zero in finite time, 16 so some scholars proposed the fast terminal sliding mode (FTSM) controller. FTSM has the advantage of finite-time convergence and has good robustness to model errors and external disturbances. 17,18 However, when the system state is close to the equilibrium state, the output of FTSM controller is singular.
In this article, to solve these challenging problems mentioned above, an extended state observer (ESO)-based nonsingular fast terminal sliding mode (NFTSM) method is used to design the attitude controller. The NFTSM controller can make the system state converge quickly in a finite time and avoid the singular problem of control output. The ESO can be used to estimate modeling uncertainties and disturbances and compensate for the output of the controller. The experimental results show that the controller designed in this article has better control effect than the traditional controller.
This article is organized as follows. Firstly, the kinematics and dynamics model of the aerial trees-pruning robot is derived based on the Euler–Newton formulation. Meanwhile, a new method is presented to determine the relationship between the yaw control torque generated by the main rotors and the culvert thrusters. Then, the attitude controller is designed by using the ESO-based NFTSM method. Moreover, the dynamics model and control allocation strategy are addressed for aerial trees-pruning robot during the cutting operation. Finally, the effectiveness of the attitude controller and control allocation strategy is verified by simulation and experiment.
The kinematics and dynamics model of the aerial trees-pruning robot
In this article, the aerial trees-pruning robot can be modeled as a rigid body with six degrees of freedom, linear translation along the inertial
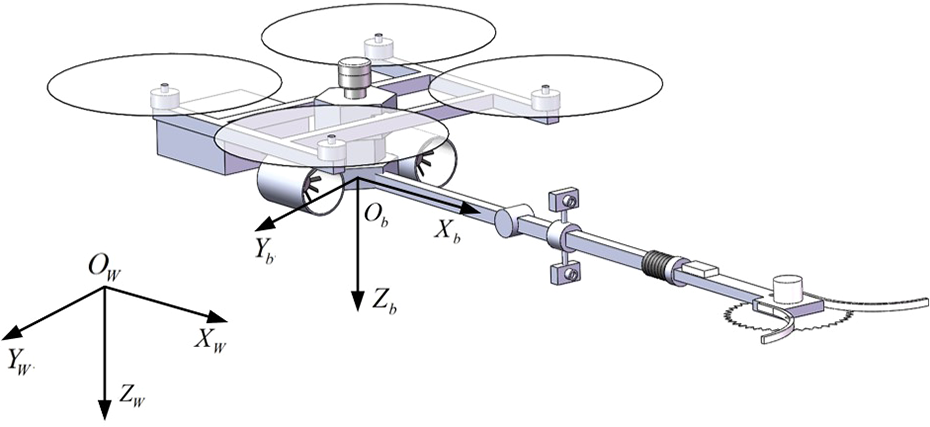
Inertial reference frame and body reference frame.
The aerial trees-pruning robot equipped with a cutter arm and a double-saw blade is designed for tree barrier cleaning. The culvert thrusters are symmetrically mounted on both sides of the aerial trees-pruning robot to provide horizontal thrust.
According to Newton’s second law, the linear kinematic model of the aerial robot described by the positional and velocity differential equations 19 is given as follows

Specifically,

where s and c indicate sin and cos, respectively. The roll angle of the aerial robot is signed as ϕ, the pitch angle is marked as θ, and the yaw angle is denoted as ψ

where f represents the total lift generated by the four rotors in the body reference system,

f dl and f dr indicate the thrust provided by the left and right culvert thruster, respectively. Then

According to the work of Baranek et al., 20 the aerial robot dynamic model obtained by Newton’s Euler equation is as follows

where
Considering that this article mainly studies the state of small-angle and low-speed flight of the aerial robot,


In this work,
And

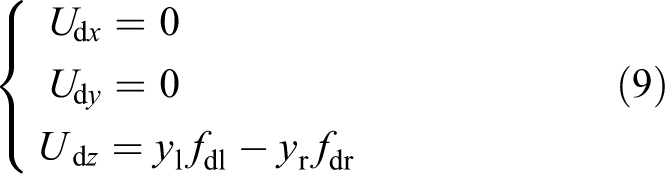
Equation (10) is the control allocation matrix of the culvert thrusters, and the thrust of the left and right culvert thruster can be determined by the expected forward thrust f d and the desired control torque U dz of yaw channel.
The aerial robot is driven by multiple motors and rotors. Rotor speed determines the total lift force and torques of the aerial robot. For the “X” arrangement of the aerial robot developed in this article, its dynamic layout 21 is shown in Figure 2.

The dynamic layout of the aerial robot.
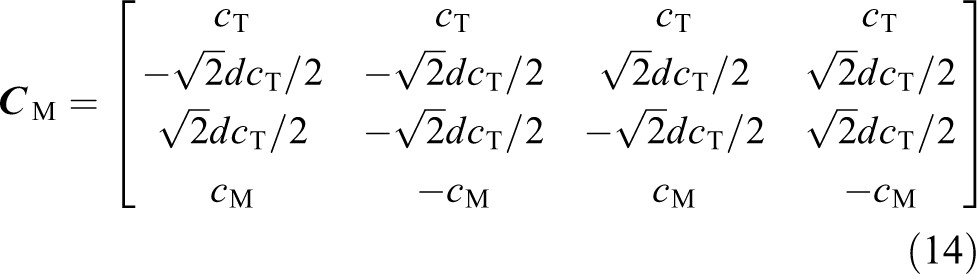
Rotors 1 and 3 rotate counterclockwise, and rotors 2 and 4 rotate clockwise. The total lift force generated by the four rotors is calculated as follows

The total torques generated by the four rotors are given as follows

where
Moreover, the control allocation relation can be expressed by the following equation

where
According to equation (7), both the culvert thruster and the main rotor are involved in the attitude control of the yaw channel. Therefore, the desired control torques generated by the attitude controller of the yaw channel should be allocated to these two actuators. This article uses the following method (i.e. formula (15)) to determine the relationship between the yaw control torque generated by the main rotors and the culvert thrusters
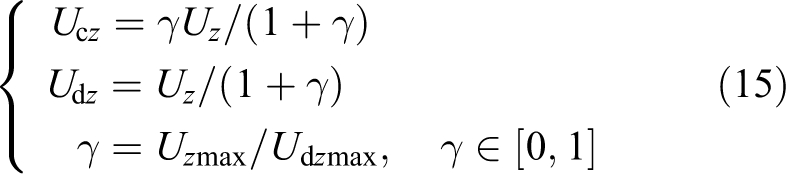
where γ represents the proportional coefficient, which is determined by the maximum yaw control torque
Attitude controller design
Different from the general unmanned aerial vehicles (UAVs), the aerial trees-pruning robot carries different workloads each time it works, which will cause the change of mass and inertia of the aerial robot. Meanwhile, the influence of external disturbance on attitude control cannot be ignored. Accordingly, the modeling uncertainties and unknown disturbances must be taken into account. In this section, an NFTSM method is used to design the attitude controller, and the ESO is constructed to estimate the modeling uncertainties and unknown disturbances in real time.
The ESO
Considering the change of inertia and external disturbances of the aerial trees-pruning robot when performing different tasks, the change of inertia matrix

Then, the pitch subsystem can be rewritten as

where

By considering the boundedness of attitude angular velocity, the change of inertia and external disturbances, assuming that
Let

Then, the nonlinear ESO is designed as follows
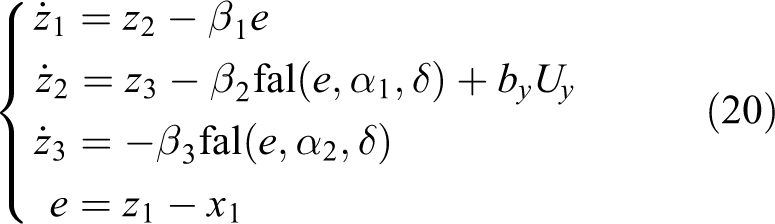
where e is the estimation error of the pitch subsystem.

The convergence of ESO (20) is proved by using the method of the self-stable region in the study by Yang et al.
24
In this study, the modeling uncertainties and unknown disturbances are defined as the lumped disturbances. ESO is designed to estimate system states and lumped disturbances and to compensate the attitude controller in real time.
NFTSM controller design
In this section, the NFTSM attitude controller based on ESO is designed, and to design an NFTSM controller, the following lemma will be used.
Lemma 1
Consider the following form of a nonlinear dynamical system 25

where for every



Then, the origin is a finite time stable equilibrium. Moreover,

For pitch subsystem (17), the NFTSM surface can be designed as follows

where

where
For the NFTSM surface (27),


When the system state is near to the equilibrium point,


Therefore, the proposed NFTSM strategy can achieve that the global tracking errors converge to zero quickly.
Theorem 1
The NFTSM surface designed according to equation (27) ensures that the system state error on it can converge to zero in a finite time.
Proof
A Lyapunov function candidate can be chosen as follows

Whose derivative is

When the system error variables are on the sliding mode surface



Then

where
In this article, the following form of exponential approach law is used to design the sliding mode controller

This approach law consists of two parts,
According to the exponential approach law and the dynamic model of pitch subsystem, the NFTSM controller can be designed as follows

where
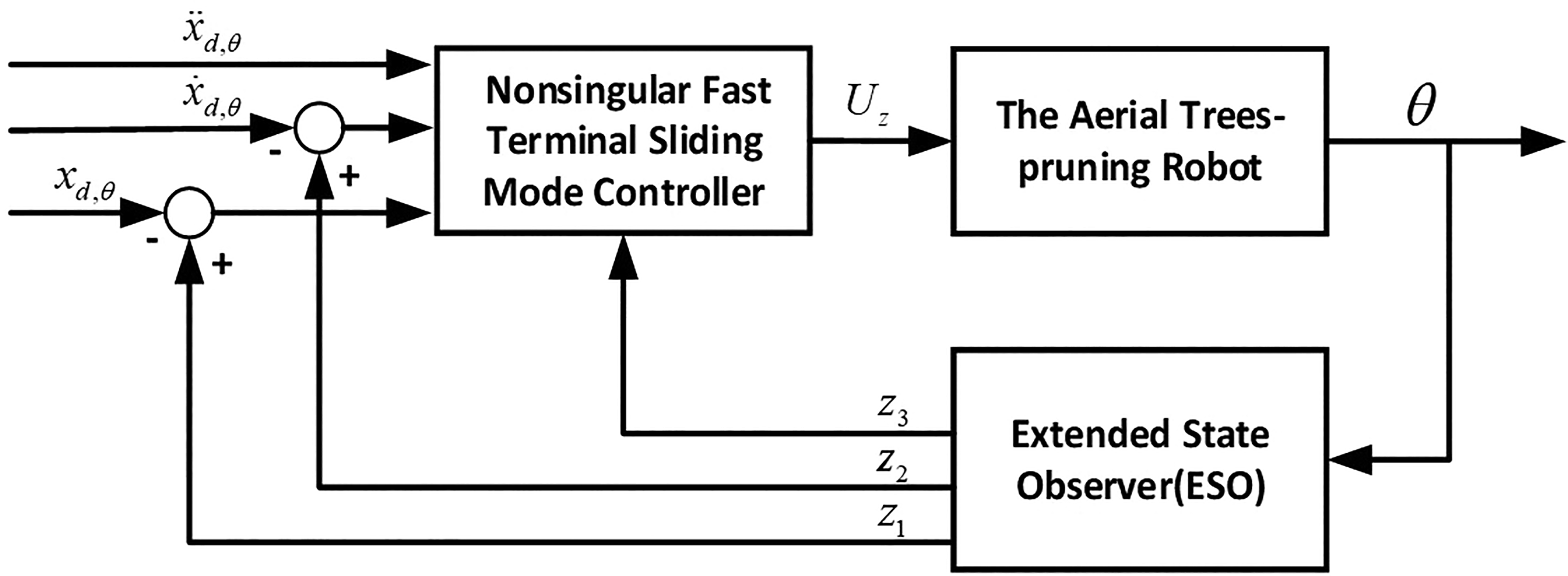
The block diagram of the pitch subsystem controller.
Theorem 2
When the control input of the pitch subsystem satisfies equation (40), the state of the system will converge to the NFTSM surface in a finite time, and further, the state errors of the system will converge to zero in a finite time.
Proof
Considering the following Lyapunov function candidate

Whose derivative is

From equation (19), it follows that

where
The same design process can be used to design NFTSM control laws for roll subsystem and yaw subsystem, to realize the triaxial attitude stability control of the aerial robot.
The cutting operation
As shown in Figure 4, the aerial robot carries a cutter arm to fly to the top of the tree and cut the upper branches. During the cutting process, the culvert thrusters provide the required thrust for the cutter, and the four rotors keep the body in a horizontal state.

The cutting operation diagram of the aerial tree-pruning robot.
The control allocation switching strategy
During the cutting operation, the aerial robot contacts with trees, which is equivalent to imposing external constraints on the aerial robot. At this time, the original dynamic model and control allocation strategy is changed. If the control allocation strategy is not adjusted and the attitude controller is sensitive to the change of model parameters, the aerial robot will lose stability or even crash. During the cutting operation, the following assumptions are proposed: The influence of bending branches on the aerial robot during cutting is ignored. During the cutting process, the attitude of the aerial robot only changes in a small range.
Assumption (1) makes contact between the aerial robot and the tree equivalent to rigid body contact, which simplifies the subsequent analysis. Assumption (2) guarantees that the attitude angle of the aerial robot will not change in a wide range during the cutting process, which is particularly important. In practical testing, too large attitude angle change in the cutting process will lead to the cutter stuck and even the aerial robot out of control.
Then, during the cutting process, the aerial robot and the tree can be equivalent to a universal joint connection, and the rotation center of the aerial robot is transferred from the body’s center of gravity to the contact point OT
between the saw blade and the tree. A new attitude reference coordinate system

where l is the projection of the distance between the center of rotor 1 and the contact point OT
on
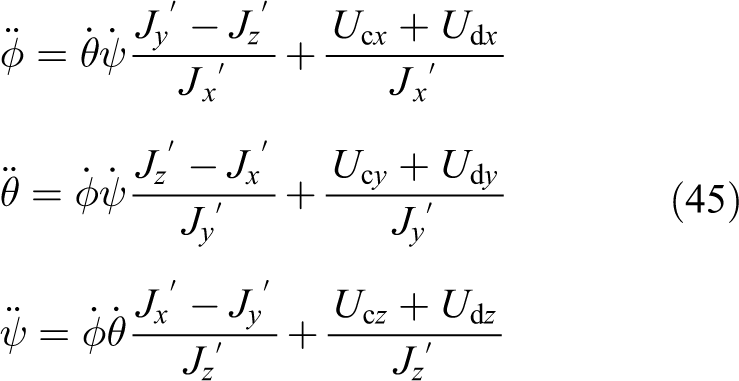
where
The disturbances caused by the cutting process
This section will introduce the structure of the cutter and analyze the disturbances caused by the cutting process. The cutter designed in this article is shown in Figure 5. The device equipped with a base, a DC brushless motor installed at the front end of the base, and a circular saw blade driven by the motor located below the base.

The structure of the cutter.
From the top view, the circular saw blade rotates counterclockwise during the cutting process.
In Figure 6, Fx represents the main cutting force and Fy denotes the reaction force of the branch to the aerial robot. Because Fy passes through the aerial robot’s center of mass, it does not affect the aerial robot’s attitude, so only the disturbance caused by Fx is considered.

The cutting operation diagram of the cutter.
The disturbance torque

where
Then

where Fx can be calculated according to the following formula 26

where V 0 indicates the volume of branches cut by the saw blade per unit time, Pc is the cutting power, K and v are cutting force and linear velocity of saw blade, respectively.
And

Simulation results and analysis
To verify the effectiveness of the attitude controller designed in this article, the simulation experiments of the ESO-based NFTSM controller and model predictive controller (MPC) are carried out. The specific parameters of the aerial robot are selected as

In Figure 7, the reference signals are given as

The attitude tracking trajectories of the MPC and NFTSM controller without disturbances. MPC: model predictive controller; NFTSM: nonsingular fast terminal sliding mode.
As can be seen from Figures 7 and 8, when tracking the constant signal, both NFTSM controller and MPC can quickly track the reference signal without overshoot. Meanwhile, when tracking periodic signals, the tracking error of the NFTSM controller is smaller than that of the MPC, and the control bandwidth of the former is larger than that of the latter.

The attitude tracking errors of the MPC and NFTSM controller without disturbances. MPC: model predictive controller; NFTSM: nonsingular fast terminal sliding mode
In Figure 9, the disturbance torque

The attitude tracking trajectories of the MPC and NFTSM controller with disturbances. MPC: model predictive controller; NFTSM: nonsingular fast terminal sliding mode.
In this simulation, the disturbance torque
In Figures 9 to 12, it can be seen that ESO can accurately observe the current states and estimate unknown disturbances in real time. Compared with the MPC, the NFTSM controller based on ESO has better ability to suppress disturbances and can make the state errors of the system converge to zero in a finite time.

The attitude tracking errors of the MPC and NFTSM controller with disturbances. MPC: model predictive controller; NFTSM: nonsingular fast terminal sliding mode.
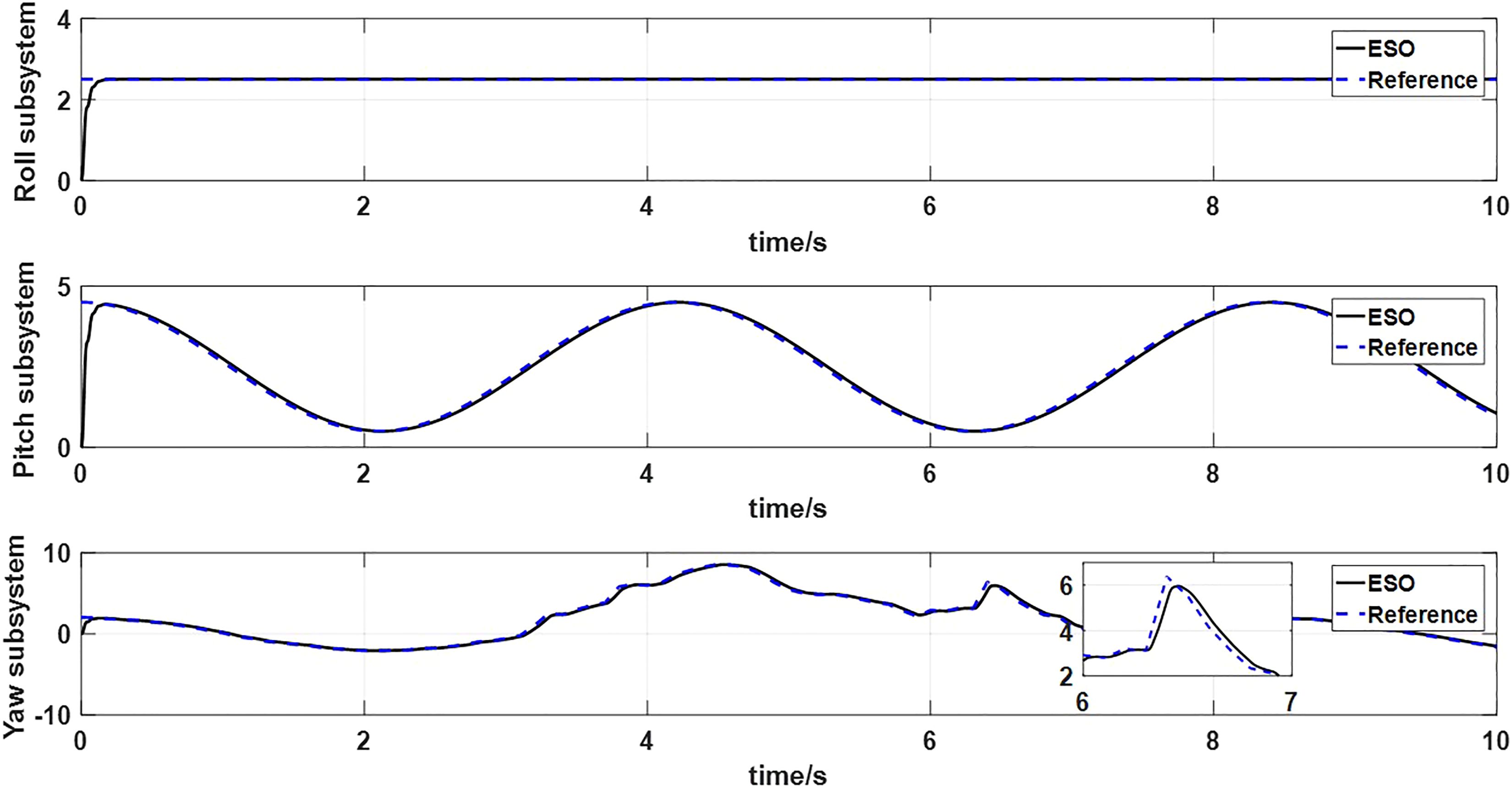
ESO tracking trajectories of disturbances. ESO: extended state observer.

ESO tracking errors of reference signals. ESO: extended state observer.
Experiment
The aerial trees-pruning robot equipped with flight control unit based on STM32F427 microprocessor. The onboard sensor module consists of a nine degrees of freedom (9-DOF) IMU unit, an ultrasonic sensor, a barometer, and a GPS module. There is a wireless module for two-way communication with the ground station and the onboard data recorder. The cutter arm is mounted directly in the front of the aerial robot. The flight control code is based on the open source work of PX4 and can be written by using C/C++ language.
The performance test of attitude controller
To test the performance of the attitude controller, the attitude tracking experiment is carried out. The control effect is shown in Figure 13.
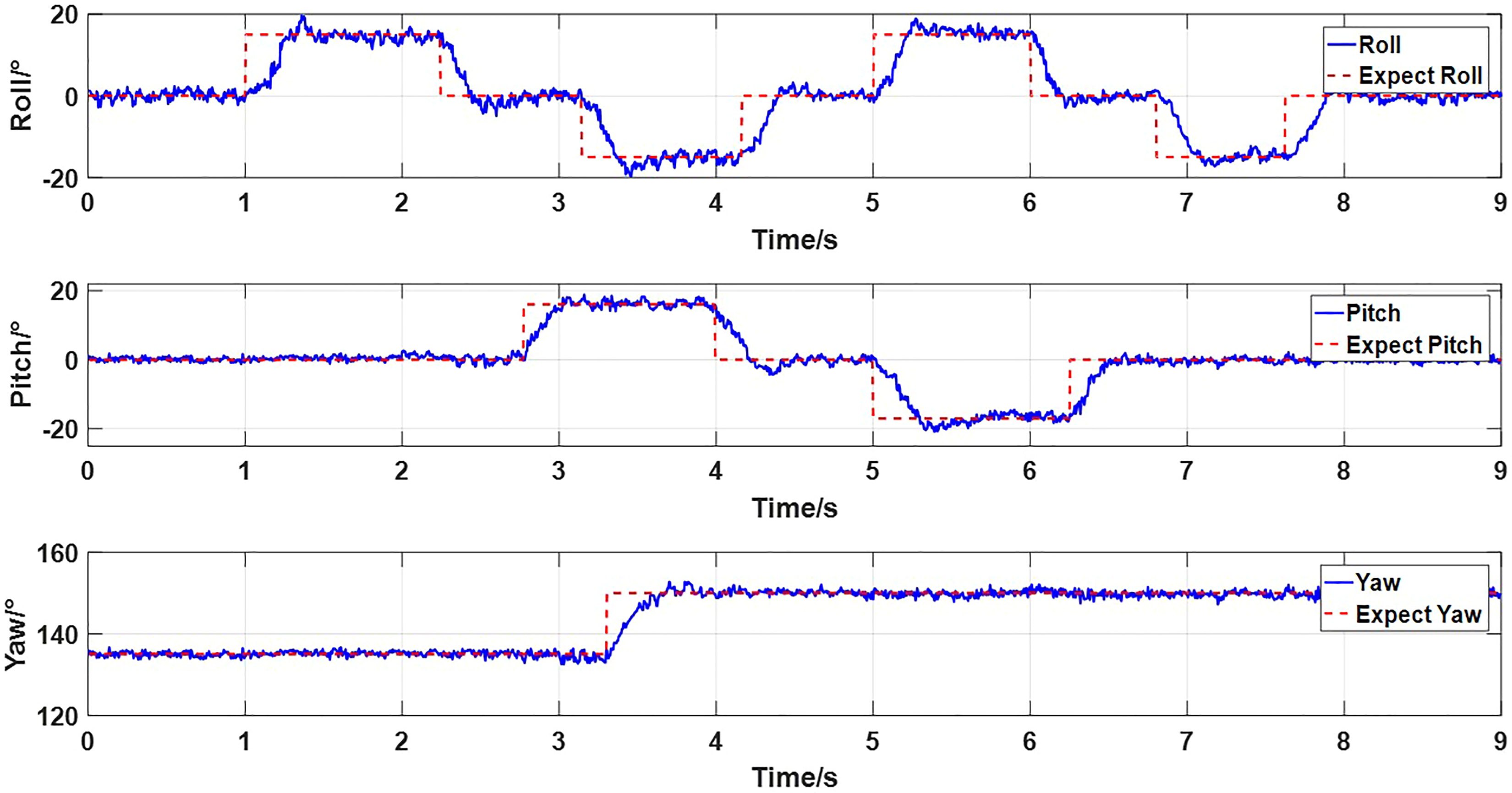
The attitude tracking experiment.
It can be seen that the attitude controller enables the aerial robot to track the expect attitude angle quickly, and the attitude tracking error can converge to near zero in a finite time.
The experiment of cutting tree branches
Many experiments have been done to verify the effectiveness of the aerial trees-pruning robot. And all experiments consist of the following four suboperations: Manually control the aerial trees-pruning robot to fly near the target branches. Open the cutter and culvert thruster to make the aerial robot move slowly at a speed of about 3 cm/s. Cutting branches and keeping attitude stable. Close the culvert thruster and manually control the aerial trees-pruning robot to fly to the next target branches.
The experiment showed that the aerial trees-pruning robot cut branches successfully below 4.5 cm in diameter. The longest flying time from the starting point to the moment of cutting completion was about 1 min, in spite of the aerial trees-pruning robot was commanded manually. This proves that there is no need to fly a long time to complete the trees-pruning task, which is important for saving energy. At the same time, it only takes about 1.5 s to cut branches with a diameter of 4.5 cm, which indicates that the aerial trees-pruning robot is quite efficient. Figure 14 shows the cutting sequence.

Cutting sequence. (a) The aerial robot is flying to the target branches. (b) Open the cutter and culvert thruster to make the aerial robot move slowly. (c) Cutting branches and keeping attitude stable. (d) After cutting, the aerial robot flies to the next target branches.
It is important that during the cutting process, the aerial trees-pruning robot should not advance too fast, or it may cause the cutter to get stuck or even the aerial robot to lose control. After many experiments, it is concluded that the forward speed of about 3 cm/s is safe and efficient. And to prevent the cutter from being stuck, the change of the attitude in the whole cutting process needs to be as small as possible. Therefore, the desired attitude angle is set as follows:
The control results are shown in Figure 14, which corresponds to the (b) and (c) suboperations in Figure 15. The aerial robot from 0 s to 2.2 s is in the forward flight state. The 2.2 s aerial robot touches the tree and begins to cut. It can be seen that the attitude angle oscillates when the aerial robot is entering (2.2–3.1 s) and exiting the cutting state (3.8–5 s), while the attitude angle remains stable during the cutting operation (3.1–3.8 s). This is because the sensor used to detect whether the saw is working has the time lag, and the switching of the control allocation matrix is not real time. The ESO-based NFTSM controller can effectively overcome the external disturbances and the uncertainties caused by the aerial robot dynamics model change. The attitude controller and control allocation matrix switching strategy ensure that the attitude angles of the aerial robot can quickly track the reference signals.
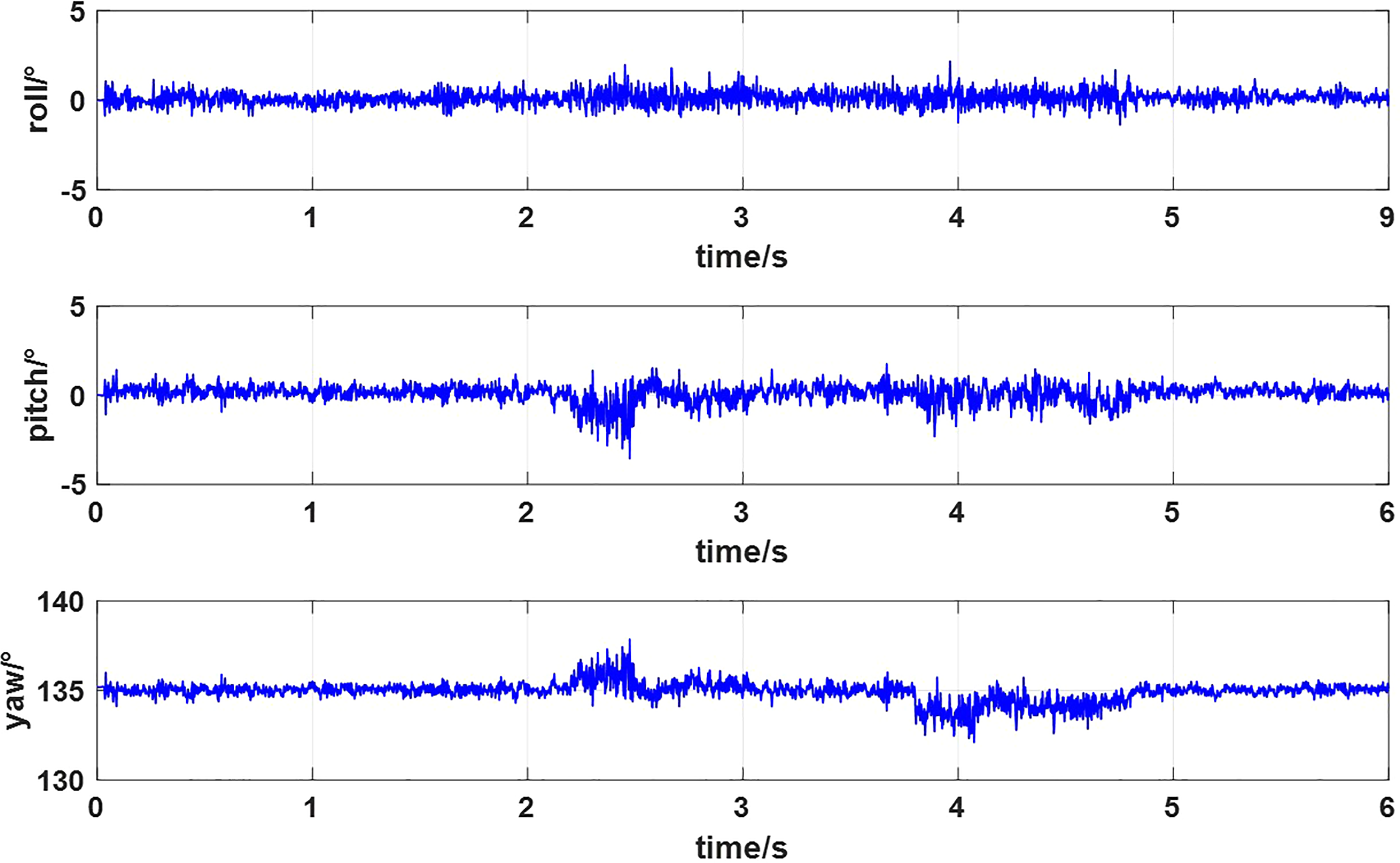
Attitude data in the cutting state.
Conclusion
In this article, an effective attitude controller and control allocation strategy for the aerial trees-pruning robot are designed. To overcome the uncertainties of the inertial matrix and unknown disturbances, the attitude controller is designed by using the NFTSM method and the ESO. Moreover, a control allocation switching strategy is proposed to solve the problem of dynamic model change of aerial robot in cutting operation. Finally, the attitude control and control allocation switching strategy are implemented on the aerial robot. The experimental results show that the ESO-based NFTSM controller and the control allocation switching strategy designed in this paper can realize the effective attitude control of the aerial robot during the cutting operation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Science and Technology Projects of China Southern Power Grid Co. Ltd. under grant 066600KK52170074, in part by the Key Laboratory Projects of Aeronautical Science Foundation of China under grant 20162852031, in part by A Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions, in part by the National Key R&D Plan under grant 2017YFE0113200, in part by the Foreign Science and Technology Cooperation Projects under grant 1604b0602018.