
Abstract
Modeling and controlling self-reconfiguration of modular robots is still a challenging problem in the field of distributed control. The two main constrains are the design of target shapes and the absence of global state for decentralized modules. We present a new way for those two problems inspired from the developmental process of plant growth. As a mathematical theory of plant development, L-systems capture the essence of growth process. We extend L-systems to the self-reconfiguration process of modules robots. Target configurations will be described in a string of symbols, and robotic structures capture fractal characters through the rewriting function. Extended graphical interpretation of L-system symbols can generate module-level predictions about robotic global states. Simulations of different self-reconfiguration processes illustrate the proposed method.
Keywords
Introduction
Modular self-reconfigurable (MSR) 1 robots consist of multirobotic modules, which themselves are completely independent working robots. An MSR robot is a nonlinear dynamical system inspired by multicellular organisms. 2 Independent working modules are similar to cells in ontogeny of natural body, and this cellular self-reconfiguration process is planning a sequence of actions for trillions of modules.
Self-reconfiguration, 3 as the most central activity of MSR robots, is the process of transforming an MSR robot from an initial shape to a desired configuration through a set of primitive and module-level actions. Modeling and controlling the self-reconfiguration process is difficult, due to the diversity and various scales of available motion strategies.
As the centralized control model has been proven to be NP problem, 4 it is no longer fit for the robotic system with numerous bodies. Decentralized control models show great potential by letting global behavior emerge from the interpretation of inner independently working modules.
Many decentralized algorithms have been developed to achieve the adjustment of global configuration. While existing work demonstrated the potential of distributed control method, there are still risks, including the design of target configurations and how global state can be translated to local information for distributed modules.
There are few works for constructing global structures for self-reconfiguration of modular robots. Some self-reconfiguration work takes predefined three-dimensional (3D) shapes directly.4–6 The manual design relies greatly on the experience of designers and requires great effort for a thoughtful result. Designed structures always target at specific environments or tasks.
There are absolutely decentralized algorithms without predefined configurations.7–11 The configuration emerges along with the interaction with surroundings or tasks at hand. Although the robustness of the method is high match with the distributed nature of modular robots, the self-organizing process can hardly converge to effective configurations. And in some cases, it is the configuration that is of great concern.
Human engineers copy natural fractals for inspiration to build successful devices, including stretchable electronics, 12 and cancer research. 13 Multibody systems also show fractal properties. Robots for limbs in several levels show great function. We also focus on describing branching configurations of modular robots.
We introduce Lindenmayer systems (L-systems)14,15 to construct target configurations for their high ability to describe branching structures. One of the important characteristics of L-systems is that only a small amount of information is required to represent very complex objects.16,17 Using suitably designed L-system algorithms, it is possible to design the L-system production rules that will create a particular class of structures. Such L-systems for climbing plants can be implemented to construct grasping structures for unknown objects of robotic structures, and the heliotropism, a form of phototropism in which flowers move to point toward the sun, can be used to lead the direction of robots’ self-reconfigure.
Distributed modules face a basic conflict between the limited capacity of obtaining information and the requirement for global state. Communications of modules in decentralized system are limited to directly neighboring modules, and no global broadcast is available. For convergence to predefined targets, global-oriented information is needed by distributed modules. Stoy and coworkers18,19 take a high-level centralized translation of the global configuration to executable rules running distributedly on independent modules. This global-centralized to local-decentralized control model has been widely used.20–23 While allowing large collections of independent modules to form determinate shapes, local rules in each module must be adjusted for each new global structure, which increases the burden of communication and is not practical for physical modules working in real word.
From the point of view of existing work, the fundamental problem of distributed self-reconfiguration is to give local moving modules the global sense about target configurations. 24 An L-system is a string-rewriting grammar that is coupled with a graphical interpretation. 25 The system can be used to churn out a plethora of finite strings that give rise (through the graphical interpretation) to one-, two-dimensional, and 3D images. We extended the graphical interpretation to self-reconfiguration of modular robots, which can generate module-level predictions about global state. Robotic systems with this extended interpretation are fit for any global shapes described by L-system using symbols with predefined interpreting meaning.
The major differences between our approach and those of other researchers are summarized below:
The proposed algorithm describes target structure in a string of symbols for the distributed self-reconfiguration of modular robots. The introduction of L-systems contributes to a high ability to describe nongeometry structures. Robotic configurations are described in a simple string of L-system symbols. Structure description is scalable to module numbers. Reconfiguration results are self-similar and adaptive to adjustment of inner parameters.
Extended turtle interpretation gives decentralized modules the global sense through local communication. The extended turtle interpretation of L-system symbols can generate module-level predictions about global state to decentralized modules. This strategy is practical for the localization problem in decentralized control and multibody systems.
The remainder of this article is organized as follows: In section “L-systems,” we give a basic introduction about L-systems and choose a proper rewriting strategy for implementation on modular robots. Section “Structure interpretation of modular robots” demonstrates the extension of L-systems in robotic self-reconfiguration. Simulations are described to illustrate the function of the proposed method in simulations. Then, we discuss those imported problems in self-reconfiguration by introducing L-systems.
L-systems
Modules in multibody system
In our demonstrations, a robotic module is represented as a sliding cubic model (SCM). 26 This model has been widely used in research for rapid verification of new methods and simulation environments. As shown in Figure 1, each model is a cube with six same connecting faces. It can achieve concave, linear, and convex translation along the surface of other modules, which are ideal movements of lattice-type modular robots.

The sliding cubic module (SCM) used for modeling robotic development in this article.
Robotic structures have branching character consisting of connected limbs. Each limb is a linear structure by connected modules. As shown in Figure 2, when representing each robotic limb with a graphical line, robotic configuration has a corresponding computer graphical description. For the high ability to describe nongeometry structures, L-systems are introduced to construct graphical description for robotic systems.

Graphical description of robotic structures.
This work focuses on modeling and controlling robots with fractal characters by introducing L-systems. We suppose modules have the ability to move climbing gradient. 27 Many research work has shown great ability to move along gradient attraction, including by cellular automata6,28 and reinforcement learning. 29
Mathematics of L-system fractals
L-systems14,15 are a mathematical theory for development of branching graphics and plant structures. The central concept of L-systems is that of rewriting, which is essentially a technique for defining complex objects by successively replacing parts of a simple initial object using a set of rewriting rules or productions.
The difference of rewriting system in L-systems and Chomsky grammars30,31 lies in the method of applying productions. In Chomsky grammars, productions are applied sequentially, whereas in L-systems, they are applied in parallel and simultaneously by replacing all letters in a given word. This difference reflects the biological motivation of L-systems, with parallel rewriting intends to capture distributed nature of decentralized robotic systems, where many independent modules work simultaneously and in parallel.
The symbol rewriting takes an initial string of characters called the axiom. On every generation, each predecessor symbol in production rules is replaced by the successor string. Consider the simple rewriting process in equation (1), from the axiomF, each letter F will be replaced by

Graphical interpretation
L-systems are usually coupled with graphical interpretation for modeling plant development. When associating a certain moving command for each symbol, a string produced by L-systems is considered to be a sequence of commands for a turtle moving. Turtle interpretation32,33 is a popular graphical interface for L-systems. The interpretation commands of different symbols in equation (1) are the following:
The basic idea about turtle interpretation in one-, two-dimensional, and 3D spaces can be found in many standard books. Just a brief introduction for graphical interpretation is given in the following. As shown in Figure 3, suppose a turtle stand on a sheet of paper facing in a certain direction, which is the initial forward direction. The turtle is trained to move directed by L-system symbols and can draw lines on the moving path. When the string of symbols in Generation 2:

Graphical interpretation of symbols
Structure interpretation of modular robots
Rewriting strategy for robotic structure
Edge rewriting is a technique of extending objects by gradually replacing some inner parts according to rewriting rules. As shown in Figure 4, the graphical interpretation of L-systems in equation (1), in each generation, inner parts of the graph are substituted by new substructures. This kind of replacement is practical in computer graphical interpretation but not in mechanical robots. As robots cannot replace the existing parts with other structures.

Graphical interpretation of the L-system in equation (1).
Instead of replacing inner parts, the idea of Node rewriting appends new parts to the initial object through rewriting. It substitutes new substructure for nodes of the predecessor structure. As shown in equation (2), symbol x is set to be an expatiation note for global development. The graphical interpretation of L-systems by node rewriting is a growing process. Figure 5 presents an interpretation of the L-system in equation (2). Starting from the Axiom, global object develops using reproduction rules and repeatedly adding substructures through interpreting note symbol x


Graphical interpretation of the L-system in equation (2).
Although engineering modules cannot grow and divide like natural cells, they can wander on the surface of other modules. This mechanism can simulate growth in nature. Corresponding to graphics, the global structure develops by attaching new modules at the growing front. Considering the motion style of robotic modules and limb growth pattern, L-systems by node rewriting are practical for robotic reconfiguration.
Extended L-systems for robotics
Robotic structures exist in 3D lattice space, so L-systems and symbol interpretation must be extended to 3D lattice robotic space. To obtain robotic limbs in different lengths, the number of copies of symbol F will represent the number of modules linearly connected for a limb. For example, a limb consisting of n linearly connected modules can be expressed with
The turtle’s orientation in 3D lattice space is represented with three vectors,

The coordinate system of turtles in 3D lattice space.
Instead of the compass direction in computer graphical interpretation, turtles in lattice space move through distributed modules. Then, their orientations are referenced to the local coordinate system of independent modules. Although modules may be connected in various relative directions, the turtle orientation remains consistent throughout the system.
The turtle orientation is unified in different connected modules through local communication. Rotation matrix

Since all rotations in lattice space are



Then, limbs in Figure 2 can be represented by symbols
Robotic structure interpretation
Turtles in lattice-based robots move through connected modules. The module with a turtle in, called turtle module in this article, holds L-system symbols. Similar to the movement in graphical interpretation, turtle modules do the moving search work according to the inner L-system symbols.
Modules have three kinds of states during the interpretation as follows:
Turtle module. Modules with a turtle in and do the moving search work according to the inner L-system symbols;
Structure module. Fixed part of interpretation result structure;
Mobile module. Besides turtle modules and structure modules, other modules in the robotic system that can move along gradient.
Turtle modules are also the gradient source module for local motion of mobile modules. Robotic structures develop through attracting new modules at the growing front. Turtle modules attract mobile modules by generating gradient information. As shown in Figure 7, the turtle module with symbol

Fractal graphics.
Extended turtle interpretation can translate global description by L-systems to module-level predictions in independent modules. The prediction attracts modules to growing front through generating a gradient information. This translation is effective to any description with defined symbols and not exclusive to specific structures.
Branching growth development
For the distributed nature of modules, there is no need to remember the current position and direction of the turtle as in graphical interpretation. New branches begin directly from symbol (by generating a new turtle module and end at the corresponding symbol)

The self-reconfiguration with L-system in equation (7) is given in Figure 8. Self-reconfiguration starts from a randomly selected module, which is the first turtle module in robotic system. Interpreted symbols with

Interpretation to a simple branching structure.
Modules interpreting predecessor symbols (x in equation (7)) do the rewriting work according to the reproduction rules. As shown in Figure 8, the module extends symbols from
Simulations
L-systems provide topological description for robotic configurations. For a robotic system with fixed number of modules, the self-reconfiguration process and reconfiguration results may vary as adjusting parameters of the same L-system.
The L-system in equation (8) is extended from equation (2) by setting the rotation angle


Self-reconfiguration of a robot system with 100 modules using the L-system in equation (8).
L-systems describe a determinate fractal calculus and a principle phenomenon of robotic shape. As shown in Figure 9, reconfiguration results are self-similar by repeating the x appended geometry. When adjusting parameters in the same L-system, reconfiguration results obviously hold similar topology to each other.
Bracketed L-systems can describe branching structures with subbranches connected. As shown in Figure 10, a robot system with 160 modules reconfigure to a flower-shaped structure using the bracketed L-system in equation (9)


A robot with 160 modules self-reconfigure using the L-system in equation (9), with
The scalability of modular robots requires the scalability of structure description methods. Both node rewriting and growth development style contribute to the scalability of proposed global description method. Configuration description adjusts adaptively to robots with different module numbers.
Using the same L-system, along with the increasing of module numbers, reconfiguration results appear to grow as natural plants. As shown in Figure 11, the node rewriting strategy allows robotic structures to develop gradually as the increase in module numbers through growing new subbranches. The setting

Self-reconfiguration results of robots with different module numbers using the L-system in equation (9), with
The rule is an infinite rewriting reproduction, which leads to a continuous self-replicating of described limbs. Each module interpreting rules in node rewriting generates processor symbols for later development of robotic structure. This design of target configuration description is self-suitable to robotic systems with different module numbers.
Discussion
Extended L-systems provide a topology description for target configurations. Complex structures can be expressed by a simple string of symbols. No strategy is used to detect the conflict of different limbs. This may be an important aspect in configuration construction for modular robots.
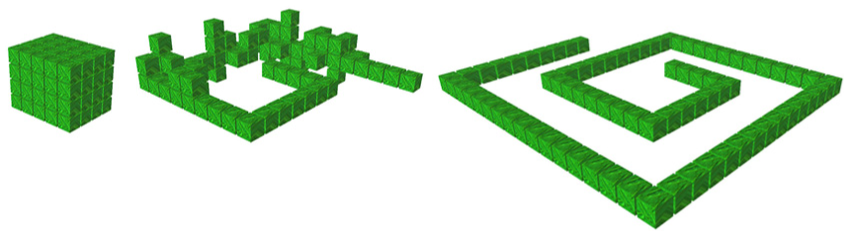
As shown in Figure 12, a robot system with 52 modules reconfigures using the L-system in equation (10). There is no conflict when the module numbers are small. But obvious conflict appears when the number of modules increases to 1000, as shown in Figure 13


Simulation of self-reconfiguration with the L-system in equation (12), with

Simulation of self-reconfiguration with the L-system in equation (12), with
The interpretation can translate global description to module-level information for independent modules. Robotic structure grows under the direction of local predictions from symbol interpretation. But the development process requires a continuous translation of L-system symbols through local communication. This puts critical requirements for local communication between connected modules.
Currently, the gradient attraction has no information about the number of needed modules, or if any module has met the need. This absence leads to abundant modules moving the same turtle module. Those abundant modules have to move back along completed limbs to other areas that need modules. As shown in Figure 7, the turtle module with symbols
The proposed method can describe complex target configurations with simple L-system symbols. As shown in equations (10) and (11), a small adjustment in Rule 2 by adding


Simulation of self-reconfiguration with the L-system in equation (11), with

Simulation of self-reconfiguration using the L-system in equation (12).
Even with small adjustment of inner parameters in the same L-system description, self-reconfiguration results will evolve obviously, as illustrated in Figure 15. Besides the high ability to describe branching structures, the inverse problem34–36 needs more work for finding proper reproduction rules to describe a given structure.
Results
Corresponding to the fractal character of modular robots, L-systems are introduced to construct target configurations for distributed self-reconfiguration. L-systems are extended to provide a topology description for target configurations, which have aroused little attention in distributed research. There is a high match of function between branching plant and robotic structure by connected limbs in several levels. This work also focuses on constructing branching configurations of modular robots.
Graphical interpretation is extended to lattice-based modular robots, which can generate module-level predictions about global state. The conflict between reconfiguration convergence and limited local information of independent modules remains an open problem. According to the L-system symbols, independent modules do the moving search work in accessible neighboring information. Local communication between directly connected modules handles the translation of both L-system symbols between turtle modules and gradient information.
Footnotes
Academic Editor: Praveen Agarwal
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (grant no. 61673137).