
Abstract
Self-reconfiguration of modular self-reconfigurable robots is a fundamental function that can be used as part of higher-level functionality. Interaction with the environment is a key factor affecting the self-reconfiguration process of modular robots. In this article, a modeling framework that makes it possible to simulate and visualize the interactions at the level of decentralized modules will be introduced. The framework extends the formalism of Lindenmayer systems (L-systems) with constructs needed to model robotic information exchanged between decentralized modules and their surrounding environments. Both the construction of target configurations and environmental sensitive adaption can be handled by extending L-system symbols and reproduction rules. The proposed method is illustrated with simulations capturing the development of branching structures while adapting to environmental obstacles.
Keywords
Introduction
Modular self-reconfigurable (MSR) robotic systems 1,2 are consist of multi independent working modules. The MSR robots are designed for exploring unknown environments, such as rescue and space missions, where environmental information are not accessible to robots in previous. The interaction with environments and self-reconfiguring global structure stand a very important role in adapting to new emergent missions and environments.
The hardware architectures of modules lie in lattice architecture, 3 –5 mobile architecture, 6 –9 chain architecture, 10 –12 hybrid architecture, 13 –17 and Freeform architecture. 18 Besides the difference in moving ability and computer expression from architecture, each module is a complete robot with on-board battery, sensing, computing, and moving ability. MSR robots provide a unique advantage over traditional robotic technologies in this term of reconfigurability.
Choosing a proper control method for self-reconfiguration patterns of MSR robots is important for further complex functions. Previous studies about self-reconfiguration can be classified into three categories: centralized control for optimal reconfiguration, 19 absolutely distributed emergent reconfiguration, 20,21 and the global-centralized and local decentralized control. 22 –26 Based on these studies, we may understand how MSR robots reconfigure and are affected by the global planning and local interaction among modules. Previous work about distributed self-reconfiguration in obstacle environments 20,21 let the result structure emerge depending on the local interaction without global planning. However, the convergence of self-reconfiguration to the desired configuration is important in some cases. For the reason of conflict between convergence and environmental adaption of reconfiguration process, L-systems 27 are introduced in this article to make it possible to interact with environments and converge to predefined structure. L-systems have proven to be a convergent 28 and practical method 29 for distributed self-reconfiguration of modular robots.
The purpose of this article is to provide the first step to introduce environmental factors/influence of the literature on self-reconfiguration of modular robots by modeling the self-reconfiguration in obstacle environments. While L-systems describing organizational logic for self-reconfiguration, parametric reproduction rules 30,31 serve additional functions for adaption in environmental influencing conditions.
While distributed self-reconfiguration using L-systems is convergent to predefined topology in obstacle free environments. 28 This work introduces parametric L-system for environmentally sensitive self-reconfiguration by capturing the impact of local environmental characteristics on robotic segment development. 32 –34 An essential component of the mathematical theory of L-systems is their discrete character. 35 L-systems describe global development of an organism in terms of local rules. The original L-system formalism also makes it possible to use parametric reproduction rules, which capture interactions between robotic conditions and environmental influence.
The rewriting strategy of L-systems composes different kinds of biological organisms by repeating predefined segments. This property is related to the fact that the self-reconfiguration process is a self-organized and distributed process whose activity is scalable to module numbers by adding new segments according to reproduction rules. For this character, the reconfiguration process of MSR robotic can have good properties of self-similarity and scalability to module numbers.
The sensible ability of independent modules to external environments permits the endowment of the self-reconfiguration process with a certain degree of adaption to environmental conditions during self-reconfiguration. This relies on the distributed sensing of independent modules in the system. Configuration descriptions can be structured so as to let the self-reconfiguration process discriminate between environmental signals by decentralized modules, and symbol interpretations that can direct the self-reconfiguration with environmental influence.
The paper is organized as follows. First, a framework based on L-systems for environmental sensitive self-reconfiguration are shown theoretically in detail. We recall some basics on L-systems show how the interpretation of L-systems can be extended to handle reconfiguration in obstacle environments. Then, the overall performance of the proposed strategy is evaluated by simulations. Finally, this article is concluded and future work are discussed.
Method
Robotic system
The sliding-cube model (SCM) 36 has been a convergent module for rapid verification of theories. As shown in Figure 1, each SCM has a local coordinate system with box shape structure. An SCM module can move on the surface of other modules in convex transition and linear transition.
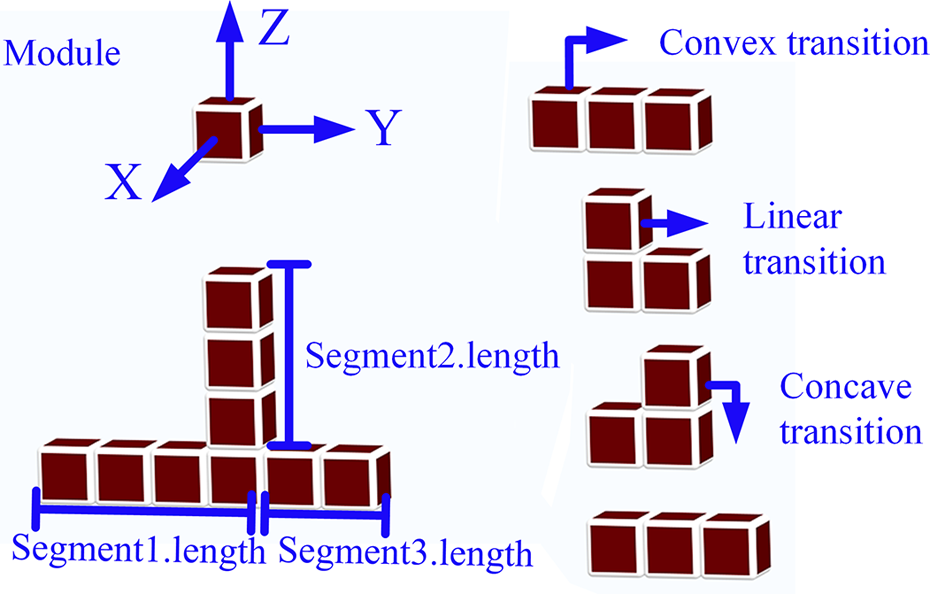
Robotic structure and basic motion of modules.
The robotic structure of SCM modules turns out to have branching character with connected segments in diverse relative orientations. The topology of robotic structures can be described by length of segments and their relative connecting orientations. Then the self-reconfiguration of module robots means rearrange the connecting ways of modules and relative orientations of segments. The branching character benefits the use of L-systems in topological description.
Research framework
This study focuses on the application of parametric L-systems to environmental sensitive self-reconfiguration of MSR robots. For the high ability of describing complex structures with simple symbols, L-systems can construct target configurations for decentralized self-reconfiguration of MSR robots. As shown in Figure 2, we combine configuration description by L-systems and self-organization of distributed sensing modules.

The framework of environmental sensitive self-reconfiguration.
This work takes L-systems for constructing target configurations and directs the reconfiguration process with the interaction of environment. L-systems capture two fundamental mechanisms that describe the target configuration and lead reconfiguration process with the interaction of the environment by decentralized modules.
L-systems and graphical interpretation
L-systems are a mathematical formalism that was proposed by Lindenmayer 37 as a foundation for an axiomatic theory of development. It is a formal grammar that was initially conceived as theory of plant growth. L-systems have high ability to describe complex forms of plants with relatively few simple rules. The basic idea is to define complex objects by successively replacing parts of a simple initial object using a set of rewriting rulers or productions. 38
A L-system is a parallel string rewriting system. The rewriting starts from an initial string, called the Axiom, and using a set of rules. Reproduction rules, in the style of equation (1), specify how the symbols in the Predecessor will be replaced by strings in Successor. A simple L-system with two reproduction rules is shown in equation (2)


The L-system starts with the axiom “F” and iteratively rewrites the string using production rules. On each generation, the result is extended by adding the underlined substring G0: F G1: F G2: F[-FF] G3: F[-FF]FF
To produce visible L-system graphics, an interpretation based on the concept of Turtle Graphics is used widely. Many books can find the explanation of turtle interpretation.
39,40
Here, we just review the basic idea briefly. First, moving commands are given to each L-system symbol. A commonly used definition for two-dimensional movement is illustrated as follows: F : To move forward a step of a unit distance along the turtle’s heading direction; + : To turn left by an angle α; – : To turn right by an angle α; [ : To push the current state onto a pushdown stack; ] : To pop a state from the stack and make it the current state.
Second, suppose a turtle is sitting on a sheet of paper at the beginning of the interpretation. It can move as commanded by L-system symbols and leave a trail along the movement. Figure 3 is the graphical interpretation result to Generation5 of the L-system in equation (2).

Graphical interpretation of the L-system in equation (2) with α = π/2.
L-systems have been used successfully for creating complex structures due to its expression power and the existence of algorithms for its automatic generation. 41 –43 But they are not directly applicable to self-reconfiguration of MSR robots. Because the modules cannot generate new ones at the neighboring space. For implementation reasons, the interpreted L-systems must be extended to MSR robots in both symbols and reproduction rules.
Parametric symbols for robotic structure
As robotic structures exist in three-dimensional (3D) lattice environments, L-system symbols and the turtle interpretation need to be extended. For describing 3D movement, the triple of (H, L, U) denotes turtles’ moving orientation. As shown in Figure 4, they keep the relative relationship H × L = U. For accessible describing definitions, symbols are used for all six orientations, which are H (Head) opposite B (Back), L (Left) opposite R (Right), U (Up) opposite D (Down).

Some simple L-system symbols and the corresponding robotic structure.
To describe the robotic structure with linearly connected modules, the length parameter is added to L-system symbols to describe structures with segments in different length. For example, the symbol F(s) will direct the turtle move forward through s modules, along the
Extended turtle interpretation
Although robotic modules cannot generate new ones in the developing direction, they can attract other modules to the front of growing to simulate the cell division of natures. Through continually attracting modules to needed positions and attach them, modular robots complete the self-reconfiguration process in the development style of plant growth. For example, the growing process in Figure 5, the continual movement of Module2 and Module3 contributes to self-reconfiguration of the whole robot.

A simple reconfiguration process of robot structure in the growth style.
With the surface locomotion simulating the cellular growth of natural cells, turtle interpretation can be extended to the self-reconfiguration of modular robots. From the state of modules point of view, modules translate through three kinds of state during the turtle interpretation: mobile module, turtle module, and structure module.
As shown in Figure 6, all modules start with the mobile state, which means that each module can move randomly as needed. The turtle, in interpretation of robotic structures, as a module state translates between connected modules. The module, with turtle in, is a turtle module and does moving search work as turtles in graphical interpretation. When it needs a module at the neighboring position in moving direction, it will attract mobile modules through gradient information. 28 For attracting mobile modules and giving local directions for decentralized modules, the gradient attraction has been widely used. 23,24,28,44 Modules in all states take part in the translation of gradient information. Mobile modules move limbing gradient to the neighboring position of turtle modules. The newly attached mobile module receives L-systems symbols from turtle module and changes state to a turtle module.

State translation of decentralized module during the self-reconfiguration process.
In case 1 in Figure 6, a mobile module changes state of the turtle module when it receives turtle state from a neighboring turtle module. In case 2 in Figure 6, a turtle module changes state of the structure module when its all neighboring conditions satisfy the symbols description of inner L-system symbols. Structure modules are modules needed for the global structure and will not move anymore.
Parametric reproduction rules for environmental interaction
The main difference of this work from the early implementation lies in the consideration of obstacles. As shown in equation (3), productions are modified to include numerical conditions that must be satisfied in order for the production to be applied. The introduction of parametric reproduction rules makes use of the numerical attributes of modules in the selection of an appropriate production.

During the self-reconfiguration, decentralized modules handle the rewriting work separately. Through describing environmental requirements in the condition of reproduction rules, the influence of local environments can be taken for the rewriting and interpretation work of decentralized modules.
The model of a self-reconfiguration in obstacle environments includes two components: a topological description expressed using an L-system and the relevant aspects of the environment. The technique for incorporating environmental factors into the reconfiguration process by L-systems depends on the distributed modules dealing with local environmental information independently and on time.
The turtle module with parameter symbol
The turtle module can avoid collision by stopping the development of the current segment. This article takes the second choice by stopping the following development through using rule 1 in equation (4). This rule stops the development of segment by setting the length parameter zeros, that is l = 0.

For the use of environmentally sensitive production rules, the robot is allowed to interact with its environment during the self-reconfiguration process through the local interaction of decentralized modules. Modules should consider both its external and internal conditions. Then the following algorithm is implemented in each module. Repeat Step 1: Interpret internal symbols requirements and collect external environmental information. Step 2: Interact reconfiguration work according to the L-system rules while considering both internal and external conditions. Until done
Simulations
Function of parametric symbols
L-system symbols are extended to 3D lattice environment and contain the length parameter. This extension benefits the construction of robotic structures in symbol description. The successful symbol interpretation is the foundation of the proposed method for distributed self-reconfiguration. Simulations are done to illustrate the function of parametric symbols in directing the development of robotic segments. The simulation environment is built using Microsoft Robotics Developer Studio (MRDS) using C# programming language on a PC computer. The Decentralized Software Services of MRDS match with the distributed nature of modular robots.
As shown in Figures 7 and 8, a robot system consisting of eight SCM 36 modules reconfigure to different structures by interpreting given symbols.

Self-reconfiguration by interpreting parametric symbols L(3)H(3)U(2).
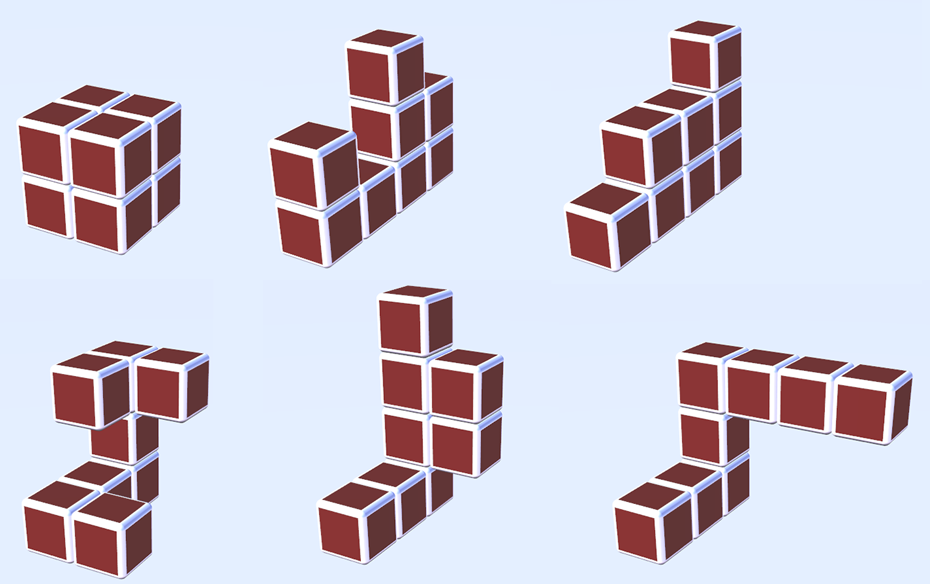
Self-reconfiguration by interpreting parametric symbols L(3)U(2)H(3).
The successful reconfigurations verify the function of designed parametric L-system symbols. Result structures differ greatly by adjusting given symbols slightly. This variability shows the high constructing ability of the proposed method using L-systems.
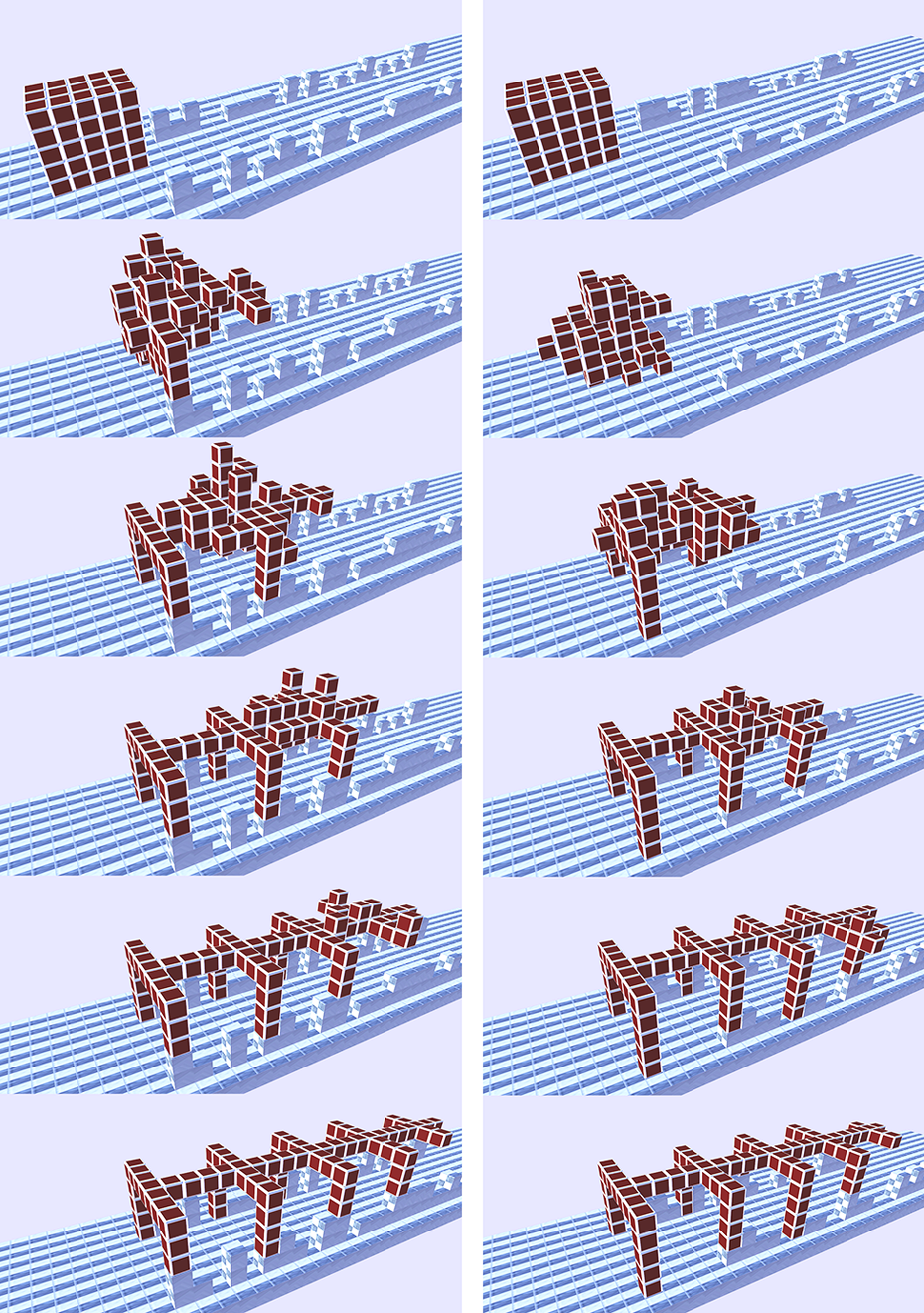
To illustrate the bracket character for branching structure and rewriting strategy for reproducing segments in constructing global structures, a L-system for branching structure is designed in equation (5). Reproduction rules, Rule2 and Rule3, repeat described segments at each rewriting work

Robots, with increasing number of modules (20 modules, 75 modules, and 120 modules), reconfigure from initial lattice structure by interpreting the L-system in equation (5). Those reconfiguration processes are shown in Figure 9. While the successful developing process, reconfiguration results turn out to be self-similar by continually repeating described segments as the increase of module numbers.

Self-reconfiguration by interpreting the L-system in equation (5).
Function of parametric reproduction rule
To illustrate the function of environmental sensitive reproduction rules, the parametric rule in equation (4) is added to the L-system in equation (5). The new L-system contains two structure extension rules and one environmental interaction rule, as shown in the following

Obstacles are generated randomly in each simulation and the height is random in each point. No obstacle information is available to the robot system. Modules interact with local environments using the Rule3 in equation (6). As shown in Figure 10, robotic structures during the reconfiguration process adapt to touching obstacle in a local sense.
Self-reconfiguration in obstacle environments using the L-system in equation (6).
Adaption to obstacle environments
The design of parametric reproduction rules makes it possible for modular robot to interact with the external environment through local sensing of distributed modules. The existence or not of obstacles influence reconfiguration result in the level of distributed modules. This simplifies the design of environmental interaction strategy for decentralized modules. A module only needs to consider neighboring environments in sensible range and does motion planning in limited conditions. Multi simulations with randomly generated obstacles are did. As shown in Figure 11, all reconfiguration results show the adaption to the unknown uneven ground and keep the desired organizing principle described by the first two rules in equation (6).
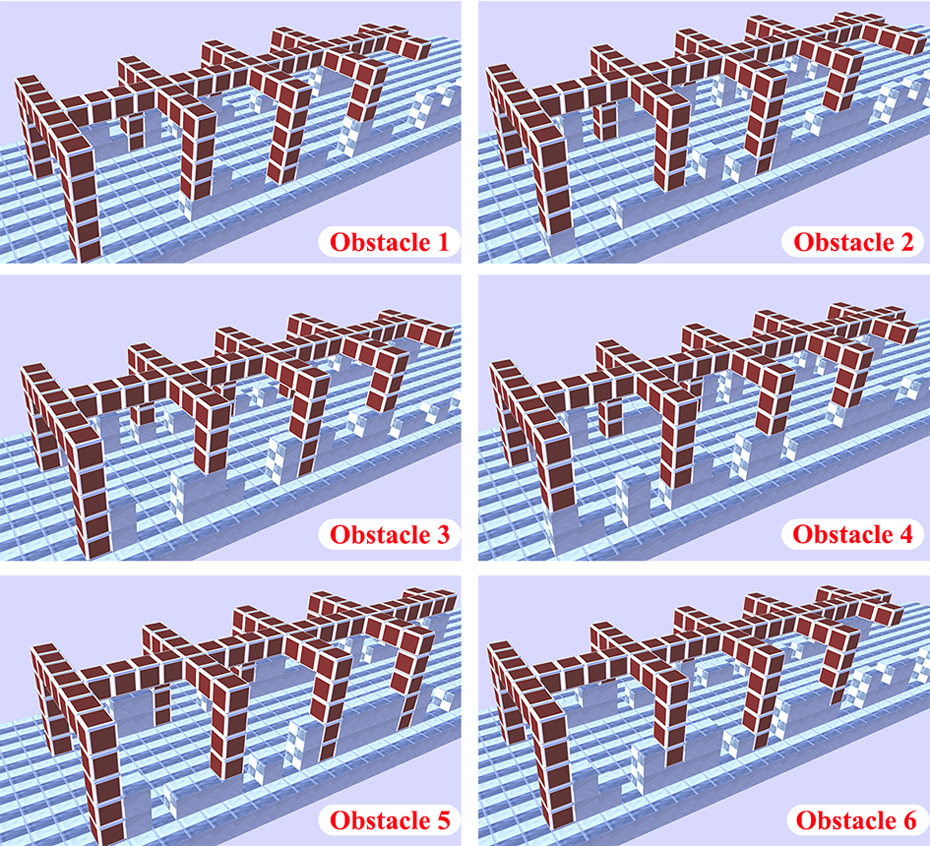
The adaption of self-reconfiguration to different obstacle conditions.
The introduction of L-systems brings the convergence of distributed self-reconfiguration. This character is important for reconfiguring to predefined structure and adapting to surrounding environments at the same time. The convergence of self-reconfiguration in obstacle free environments has been proven in our previous work. 28 Quantitative results in Figure 12 show the state of convergence and parallel moving modules during self-reconfiguration in different obstacle environments in Figure 11. Reconfigurations in different obstacle environments show the similar convergent process. For the decentralized nature of modular robots and the proposed control method, reconfigurations also have the similar state of parallel moving modules.

The convergence of self-reconfiguration and parallel moving of decentralized modules.
Discussions
Although L-systems have the high ability to describe complex structures, the inference problem 45 –47 of L-systems has long been an open problem. In the same target structure, there may exist different corresponding symbols. Distributed self-reconfiguration by the proposed method also face this problem. As shown in Figure 13, interpretations of both strings L(3)[H(3)]U(2) and L(3)[U(2)]H(3) lead to the same result structure. This raises the problem of how to design reproduction rules and symbols to capture a given robotic structure.

Self-reconfiguration by interpreting parametric symbols L(3)[U(2)]H(3) or symbols L(3)[H(3)]U(2).
The parametric rules introduce a rule-based way for distributed modules to interact with the environments through the local sensing and decentralized motion of independent modules. The reaction strategies in this article are primary to a potential value for MSR robots. Although L-systems have high ability to describe a variety of reaction strategies, for example, the climbing phenomenon in plants can be used for generating grasping structures of unknown objects in robots. This article just introduces the way of environmental influence on self-reconfiguration process. Both the simulation example and the current system are focused on verifying the influencing strategy. Future work will take specific reaction strategies according to missions and environments at hand.
Simulations are based on the independent movement of lattice-based modules. For future implementation, they need to be verified on the lattice-based hardware platforms in the future work. The sensing and moving ability of independent modules are those key factors that might impact the hardware implementations.
Conclusions
The distributed self-reconfiguration of MSR robots has long been an open problem. From the decentralized nature by multi independent agents point of view, the self-reconfiguration process of MSR robots is similar to the self-organization of swarm robots and the emergent process of cellular robots. But choosing an appropriate mechanism for controlling the distributed self-reconfiguration is more difficult when considering environmental influence and constraints for relative movement of independent modules. To solve this challenging problem, principles the govern plant growth is translated into bio-inspired algorithm that can exhibit comparable self-organizing behaviors in MSR robots.
For the high ability to model plant growth, L-systems are extended to control the distributed self-reconfiguration of MSR robots. The idea of using L-systems shed a new light to the distributed self-reconfiguration. Both L-system symbols and rewriting rules are extended to contain different parameters according to the distributed nature of robotic modules. Extended parametric reproduction rules make robots environmental sensible through local sensing of independent modules. Self-reconfiguration by the proposed method shows environmentally sensitive and self-adaption during the emergent process of global structures. Reconfiguration results, keep organizing principles defined by L-systems and adapts to external environments.
The approach presented in this article can be the starting point for further research from both theoretical and practical side, enriching each other with ideas from MSR robots and from L-systems. Such open research lines involve new developments in the application of the well-established theoretical framework of L-systems for the abstract representation of robots (and hence a deeper understanding of the theoretical possibilities) and also, from the practical side, the development of new abilities of physical robots inspired in the local relative position of the modules and the local encapsulation of the information. The high ability of describing complex structures of L-system provides a novelty way for constructing target configurations in symbol rewriting.
The research method proposed in this article is not limited to one specific kind of self-reconfigurable robot. There is no information regarding the geometry, the actual shape and size of the modules, or their position in space. Only how the modules should be arranged is regulated. So this method can be implemented in other modular robotic systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (grant nos. U1713201 and 61673137).