
Abstract
In biped walking, dynamic balance ability is an important evaluation index. Zero-moment-point-based trajectory control is a common method for biped dynamic walking, but it requires complex control mechanisms that limit its applications. With the help of passive dynamics, the biped walking based on the inverted pendulum model can achieve dynamic walking in a simple way; however, it has no stopping ability, which is necessary for practical use. To solve this problem, this article proposes a footed inverted pendulum model and develops a simple three-part decomposition control algorithm for controlling biped dynamic walking based on the model. In the control algorithm, the biped walking is decomposed into three separate control parts: body posture, body height, and body velocity. Body posture is controlled by the stance hip, body height is controlled by the stance knee, and body velocity is controlled by the stance ankle and swing foot placement simultaneously. A simulation is presented to analyze the foot’s effect on the inverted pendulum model. Two hardware experiments exploring velocity control and balance are described, with the results showing that the biped can achieve dynamic walking with stopping ability by using the simple control algorithm based on the footed inverted pendulum model.
Introduction
Robots that move on two legs are called biped robots. Biped robots fall down easily compared to the wheeled robots, four- or more- legged robots, such that the dynamic balance ability is an important evaluation index for biped walking. A common method for biped dynamic walking is zero moment point (ZMP)-based trajectory control.1–4 According to the published paper, humanoid robots such as those created by the Humanoid Robotics Project, 5 Honda, 6 and the Korea Advanced Institute of Science and Technology 7 utilize ZMP-based trajectory control. However, this method specifies a nominal trajectory about which the system is tightly controlled.8,9 This condition restricts widespread applications of the biped robots and creates a demand for a simpler control algorithm for biped walking.
One extreme simple control method for biped walking is no active control, this motion pattern, proposed by McGeer,10,11 is called “passive dynamic walking.” Garcia et al. 12 used an inverted double pendulum model with one body mass and two leg masses to illustrate passive dynamic walking; one inverted pendulum makes contact with the ground as the stance leg, while the other acts as the swing leg. The stance leg and the swing leg move by the action of gravity and inertia. McGeer 10 and Collins et al. 13 built two-dimensional and three-dimensional passive dynamic walking robots, respectively. These biped robots can walk down a ramp independently, relying only on gravity and inertia. The motion character of the passive dynamic walking robots is its fixed walking parameters determined by mechanical structure, for example, the step period is determined by leg length, ramp slope, and body and leg masses. Passive dynamic walking demonstrates that biped walking can be controlled through simple means. However, passive dynamic walking robots are most commonly used as children’s toys, 14 and they are not applicable in practical settings because they cannot sustain steady walking on level ground. Furthermore, they are highly sensitive to disturbance, 15 these problems raise the question of how to regulate the motion of a passive dynamic walking robot for practical applications.
If active controls are added to a passive dynamic walking robot, its motion pattern is no longer a purely passive dynamic process, although its walking performance improves. Actively controlling the swing foot placement and the stance leg length are two ways to regulate biped motions in practice.16–18 Actively controlling the swing foot placement means that the swing leg’s motion is no longer a passive dynamic process, and actively controlling the stance leg’s length has the same consequences for the stance leg’s radial motion. With these adjustments, only the stance leg’s rotating motion remains a passive dynamic process. Based on this method, the walking robot Ranger created by Bhounsule et al. 15 achieves stable walking with dynamic balance in a relatively simple way. The motion character of walking robot Ranger is its velocity stabilize ability. It increases step length to decelerate when walking faster and increases the stance leg push-off to accelerate when walking slower. However, although the biped based on inverted pendulum model (IPM) can achieve dynamic walking, it is statically unstable; it tends to fall down when standing still. 14 Bionics research demonstrates that human walking is not only balanced by the swing foot touchdown but also balanced by the stance ankle torque. 19 The foot is ignored in the IPM, with the result that the biped cannot stand still and has no stopping ability. If a biped can walk but not stop, or can only stop walking by falling down, it cannot be used in practical applications.
In order to realize the biped dynamic walking with stopping ability in a simple way, this study connected a foot to the end of an inverted pendulum to create the footed inverted pendulum model (FIPM). The connection point between the stance foot and the end of the inverted pendulum is called stance ankle. To avoid tight position controlling of the rotation motion of the FIPM, in this article, the stance ankle is controlled by torque so that the rotating motion of the FIPM will have the compliant character to disturbances. The structure of this article is as follows: the definition and dynamic analysis of the FIPM are detailed in section “The dynamic equations for FIPM,” the establishment of decomposition control algorithm with dynamic balance based on the FIPM is given in section “Control algorithm,” the comparison of the biped motion state different change between the IPM and the FIPM is explained in section “Comparative analysis in phase-plane,” the analyses of the kinematics relation between the FIPM and biped robot is shown in section “Joints control of the biped robot,” and the experiment carried out and verification of the effectiveness of the control algorithm is shown in section “Experiment and results” last.
The dynamic equations for FIPM
Figure 1 shows the FIPM proposed in this article. This model is composed of three parts: a body with mass m and rotational inertia J, a massless telescopic leg, and a massless foot. The leg is connected to foot by rotational joint with torque

The footed inverted pendulum model: (a) overall structure, (b) the force analysis of inverted pendulum part, and (c) the force analysis of foot part.
The defining characteristic of this model is the foot, which can provide a finite ankle torque
In this article, the dynamic equation of the FIPM is deduced by the Lagrangian method according to Figure 1(a) and (b).
The kinetic energy T of the FIPM is represented as follows

The potential energy U of the FIPM is composed of four parts: gravitational potential energy

Then, Lagrange’s function L can be expressed as follows
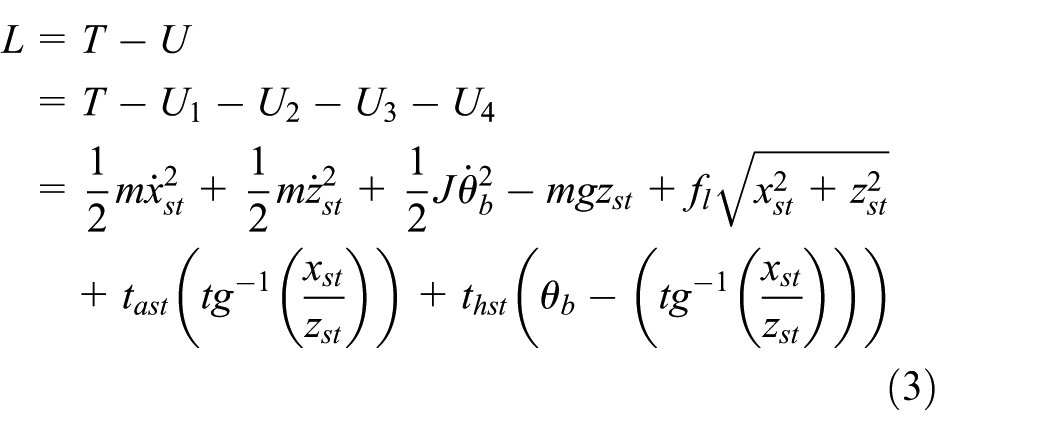
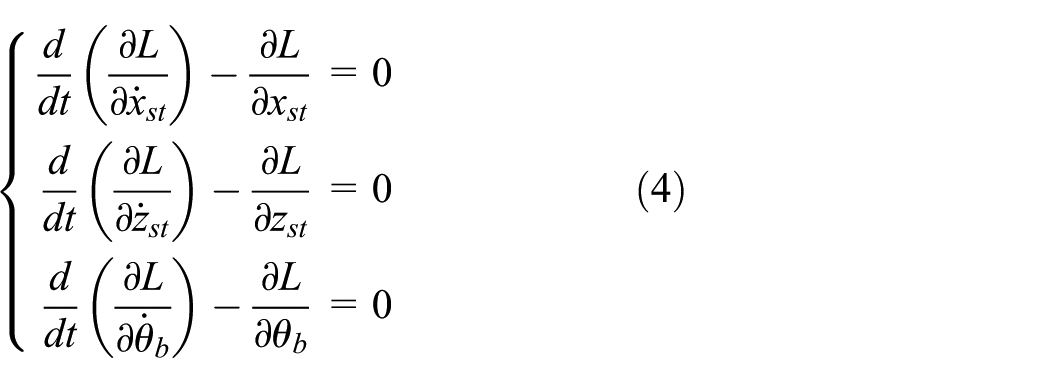
Substitute Lagrange’s function L into Lagrange’s equation of motion as follows
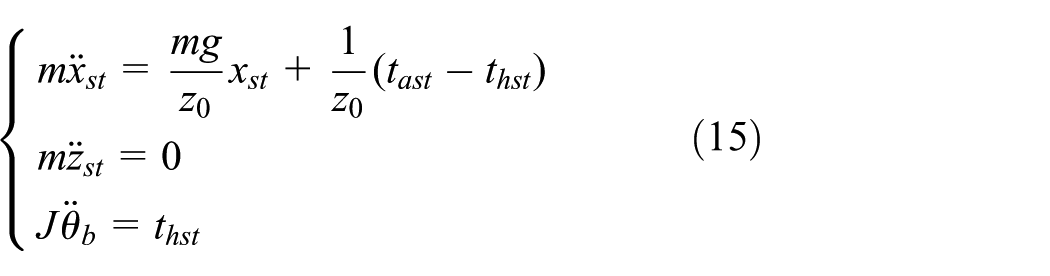
The expression of the FIPM’s dynamic functions is obtained as

From Figure 1(b), we can derive the horizontal and vertical supporting forces

From Figure 1(c), we can establish the torque equilibrium equation about the ZMP

Then, we can obtain the expression of stance foot ZMP position

By substituting the horizontal and vertical supporting forces

In order to guarantee that the foot pad makes contact with the ground, the ZMP position

where
Substituting equation (9) into (10) yields the following

Then, the value range of stance torque

The values of body horizontal acceleration
Control algorithm
Dynamic balance control idea
According to Newton’s second law of motion, force is the reason that an object’s motion changes. Disturbance forces such as an unexpected push from the outside world, an uneven ground, or an active push from itself will inevitably change its body’s motion. Figure 2 shows the relationship between a disturbance force and the FIPM body’s motion states. In this article, the dynamic balance control idea is servoing the body’s motion states within the desired targets in order to balance the disturbance forces. If the body encounters a disturbance force, its motion must change; the control algorithm monitors the body’s motion and corrects it when it deviates from the desired targets, neutralizing the disturbing force. The body’s motion states are controlled across its all freedoms, through the body height
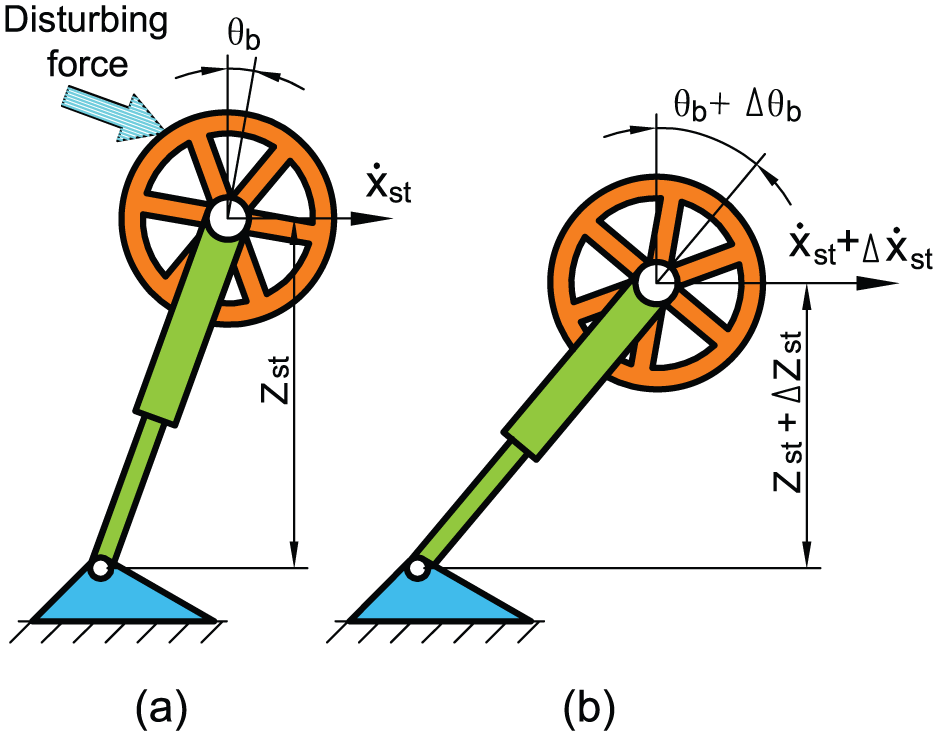
Relationship between disturbing force and body motion states: (a) the model’s motion states just before encountering a disturbing force and (b) the model’s motion states just after encountering a disturbing force.

The corresponding control relation between the legs’ actions and the body motions based on the FIPM.
Servo body height
In Figure 1, the stance leg length

When body height

where
If the body height maintains a constant value
and

Servo body pitch angle
Because


The control block of body pitch
The closed-loop transfer function for controlling body pitch angle

In biped walking, the expected body pitch angle

By setting

The transfer function for controlling body pitch angle is a standard two-order control system; when the damping coefficient
Servo body velocity
Based on the FIPM, the body velocity
Stance ankle torque
The formula for controlling body velocity

Setting

Equation (22) and the ankle torque value range in equation (16) are servo formulas used to control body velocity
Swing foot touchdown position
To establish the equation of the swing foot balance method, some simplifications are necessary. The effect of ankle torque

According to the linear IPM proposed by Kajita and Tani,
20
if the swing foot position

where

Relationship between swing foot position and the body velocity change for linear inverted pendulum model: (a) unchanged, (b) increase, and (c) decrease.
Equations (22) and (24) are combined to servo the body velocity
Step frequency control
In a fixed leg-length inverted pendulum, the swing leg touches down as the body moves downward, and the swing leg lifts off the ground when the body moves upward. In contrast, in the linear IPM, the body height theoretically maintains a constant height

where
When the step frequency

The swing foot’s vertical velocity
Comparative analysis in phase-plane
This section will analyze the foot’s effect in phase-plane. The biped’s passive dynamic motion in the phase-plane is given first, and then compares the biped motion in phase-plane when based on the IPM and the FIPM. The biped based on the IPM can balance disturbance through the swing foot touchdown
The phase-plane
Phase-plane analysis of biped passive dynamic motion
The phase-plane expresses the biped motion process on a plane using body level displacement

Integrating the two sides yields the following

where E is a constant.
Equation (28) is composed of g,

Phase-plane of passively moving biped robot.
Phase-plane analysis of IPM
If a biped’s balance is based on the IPM, swing foot placement

where
Phase-plane analysis of the FIPM
If a biped’s balance is based on the FIPM, both the swing foot placement

where
Comparing balancing abilities in the phase-plane
For the comparative analysis, we simulated both of the models. The energy E is set to zero to begin with, and the control target was keeping the biped stopped over the supporting point. In this process, the biped undergoes three disturbances occurring at point A, D, and O. The disturbance at point A makes the biped’s velocity suddenly increase 0.29 m/s, the disturbance at point F makes the biped’s velocity suddenly increase 0.12 m/s, and the disturbance at point O makes the biped’s velocity suddenly increase 0.08 m/s. Figure 7 shows the biped’s motion process for different models in phase-plane. Figure 7(a) represents the motion phase plot based on the IPM, and Figure 7(b) represents the motion phase plot based on the FIPM.

Biped motion process based on the IPM and FIPM in the phase-plane.
When the biped experiences a large unexpected disturbance at Point A, its velocity suddenly increases about 0.29 m/s, raising the biped’s orbit energy E up to 0.1. Based on the IPM, according to equation (29), the body’s dynamic equation can actively change when the swing leg touches down. The biped moves passively along the curve BC in the orbit energy E = 0.1 before touchdown in Figure 7(a); then the swing leg’s touchdown instantaneously converts the biped’s motion state from point C to point D, and after touchdown, it will again move passively along the orbit energy curve E = 0. Based on the FIPM, according to equation (30), the body’s dynamic equation can actively change not only through swing leg’s touchdown, but also by adjusting stance foot’s ZMP via stance ankle torque
When the biped experiences a smaller unexpected disturbance at Point F, the biped’s velocity suddenly increases about 0.12 m/s, raising the orbit energy E up to 0.03. Based on the IPM, according to equation (29), the biped uses the swing leg’s touchdown for balance, similar to the reaction to a larger disturbance at point A. Based on the FIPM, according to equation (30), the biped’s motion state is adjusted by stance foot ZMP, which converts the biped motion state from point G to point H and converts the biped’s orbit energy E from 0.03 to 0. In this way, the disturbance is balanced by adjusting the stance foot ZMP in single stance phase before the swing leg touches down. When experiencing a smaller disturbance, the biped based on IPM uses the swing foot’s touchdown for balance, while the biped based the FIPM uses only stance ankle’s torque for balance in single leg stance phase. Therefore, the biped based on the FIPM can more quickly balance small disturbances than the biped based on the IPM.
When the biped reaches the critical steady point O, it can fall down forward or backward because of smaller random disturbance. Without a loss of generality, suppose that a small random disturbance causes a sudden increase in the biped’s velocity of 0.08 m/s. The disturbance changes the body’s motion state from point O to point P, and the orbit energy changes from 0 to 0.003. According to equation (29), the biped based on the IPM moves passively along the orbit energy curve E = 0.003 before the swing leg touches down; as shown in Figure 7(a), the swing leg’s touchdown changes the biped’s motion state moving from point Q to R, reducing the orbit energy to just below 0 for guaranteeing the biped motion reverted. Then the biped moves passively along the curve RS at orbit energy E = −0.003 until the swing leg touches down again. The biped will constantly move forward and backward along circle RSTU, moving about 0.2 m in the process. In this situation, the biped based on the IPM cannot remain in the stopping state. The biped based on the FIPM can balance the disturbance by adjusting stance foot ZMP. Although this adjusting process is similar to that based on the IPM, the adjustment by stance foot ZMP occurs instantaneous, more quickly than by swing foot touchdown, such that the biped based on the FIPM can keep stand still. This indicates that the biped based on the FIPM has the ability to stop itself.
Joint control of the biped robot
The previous sections describe the FIPM and its control methods. This section briefly introduces the biped robot, then discusses the forward kinematics and inverse kinematics relationships between the FIPM and the biped robot, and finally describes the joints control of the biped robot.
The biped robot
Figure 8 shows a solid model of the biped robot that weight 65 kg and has a height of 130 cm. The biped is composed of seven parts: one body, two thighs, two calves, and two feet. It has six freedoms: one hip joint, one knee joint, and one ankle joint for each leg. Each joint is driven by a hydraulic servo cylinder with force and displacement sensors. Two foot sensors are used to detect ground contact and one inertial sensor detect the body postures and accelerations. The biped robot performs planar motion with forward and vertical direction displacements and pitch rotation by an auxiliary bracket.

Solid model of the biped robot.
The kinematics relations
Figure 9 shows the relationship between the inverted pendulum model and the biped robot.

Relationship between (a) the inverted pendulum’s COM position and (b) the biped joints’ angles.
Forward kinematics involves deriving the COM position

where
Inverse kinematics involves deriving the joint angle

where
Joint control
The biped has six joints that need to be controlled: two hip joints, two knee joints, and two ankle joints. The hip, knee, and ankle joint of stance leg are called the stance hip, stance knee, and stance ankle. The hip, knee, and ankle joint of swing leg are called the swing hip, swing knee, and swing ankle.
The stance hip controls body pitch angle
The stance knee joint controls body height

where
The stance ankle controls body velocity
Swing hip angle


where

In order to calculate
The torque of the swing ankle is set to zero as follows

Equations (17), (22), and (33)–(36) are used to control the biped robot’s six joints.
Experiment and results
Figure 10 shows the experiment’s control process. The controller reads the sensors’ data including body pitch

Experimental control process.
This section describes two experiments performed according to the same control program. One experiment changed the body expected velocity
Velocity control test
In this experiment, the biped walked along the expected velocity. The body pitch angle

Swing foot position
Figure 12 shows the data resulting from the experiment. The red dashed line stands for the expected value, and the blue solid line stands for the actual value. Figure 12(b) shows the biped’s velocity–time curve, demonstrating that on the whole, the actual body velocity can track the expected body velocity. Figure 12(c) shows the biped height–time curve; the actual body height was about 700 mm, with an error range of 5 mm. Figure 12(d) shows the biped’s pitch angle–time curve. The actual pitch angle has about 0.1 rad error in relation to the expect body pitch angle. The conclusions from Figure 12(b)–(d) can be summarized in one sentence: the body can move at a certain height with a certain body posture. Since the body is a part of robot, this means that the biped can move. Figure 12(a) shows the biped’s displacement–time curve; the displacement tracking error is about 0.1 m, which is acceptable. This experiment demonstrates that the biped can track the expected velocity using our three-decomposition control algorithm based on the FIPM.

Experiment data on velocity control: (a) body moving distance, (b) body velocity, (c) body height, and (d) body pitch angle.
Anti-disturbance test
The dumbbell impulse experiment was used to analyze the biped’s dynamic balance using the control algorithm based on the FIPM. In this experiment, a dumbbell weighting 10 kg is hung just before the biped robot on a 0.85 m length rope. The dumbbell is first pulled up about 30° and then swings down freely because of gravity and hits the biped as it stepping on the ground. Figure 13 shows the time-elapse image sequence over the first 2 s of this experiment.

Time-lapse sequence of the first 2 s.
Figure 14 shows the experimental data. Figure 14(a) shows the velocity–time curve, which indicates that the biped moves backward upon the dumbbell’s impact before returning automatically to its original position. The integrated expression for swing foot velocity in equation (24) stands for the displacement error, giving the biped the ability to correct itself. Figure 14(b) shows the biped’s velocity–time curve. The expected body velocity

Experimental data for anti-disturbance test: (a) body moving distance, (b) body velocity, (c) zero moment point of stance foot, and (d) the position error between two feet.
Disturbance is existed in various other manners besides dumbbell impacting. Hand pushing and foot kicking are common disturbances in our surroundings. Although walking on complex ground can be seen as ground adaptability, it is a disturbance essentially for biped walking because the complex ground will disturb the body motion states finally. For testing anti-disturbance ability enough, the tests including handing pushing, foot kicking, and walking on snow ground and on stone ground are done. The experiment screenshots are shown in Figure 15, and these experiments showed that the biped can balance these disturbances as well as balancing dumbbell impacting.

The rough ground composed by stone and sand: (a) hand push, (b) foot kick, (c) snow ground, and (d) stone ground.
Conclusion
This article proposes a FIPM, in which the biped’s velocity is controlled not only by swing foot placement, but also by stance ankle. A three-decomposition control algorithm for biped walking is created based on the FIPM. The results show that the biped can endure larger disturbances and response quickly to small disturbances, meaning that it has good dynamic balance and stopping ability, which are important requirements for practical use. The control algorithm is simple and performs well, and it can be used to control a biped walking in a less complicated way than existing methods allow.
Footnotes
Academic Editor: Hamid Reza Shaker
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by State Key Laboratory of robotics and systems (Harbin Institute of Technology) under the Grant No. SKLRS201603C, SKLRS201620B.