
Abstract
Dual-arm cooperating manipulators subject to a certain constraint brought about by the desired trajectory and geometric constraint show high nonlinearity and coupling in their dynamic characteristic. Therefore, it is hard to build dynamical equation with traditional Lagrange equation. The Udwadia–Kalaba equation presents a new idea of dynamic modeling of multi-body systems. However, the dynamic modeling of the unconstrained systems still depends on the traditional Lagrange equation and is quite tedious for dual-arm cooperating manipulators. A generalized dynamical equation of multi-link planar manipulators is thus presented and proven to make modeling conveniently. The constraint relationship is established from a new perspective, and the dynamical equation of dual-arm cooperating manipulator subject to the desired trajectory is acquired with the Udwadia–Kalaba equation. The simple approach overcomes the disadvantage of obtaining dynamical equation from traditional Lagrange equation by Lagrange multiplier. The simulation results of varying law of the joint angles and the motion path of the bar prove that the dynamical equation established by this method conforms to reality.
Introduction
In the field of industrial robotics, the coordinated and collaborative operation of multi-robot performing more complicated and burdensome task instead of human is an irreversible trend. The dual-arm cooperating manipulator (DACM) is a typical example in the multi-robot field. For industrial manipulators, the accurate kinematic and dynamical model is the basis for completing all kinds of tasks. Compared with mature kinematic modeling, the dynamical modeling, especially the manipulator subject to a certain constraint brought about by a desired trajectory, shows high nonlinearity and coupling in its dynamic characteristic. Therefore, it is an important basis for realizing high-quality motion control to establish mathematical model that can describe the dynamic characteristics of this system.
At present, most scholars pay attention to the control algorithm of DACM. Only a few focus on the dynamical modeling problem. When two robotic manipulators hold an object, they create a closed kinematic chain with redundant actuation. This closed-chain system poses the problem of how to reflect the constraint relationship in the dynamic equation. The traditional Lagrange multiplier method was utilized to deal with dynamical modeling of DACM. 1 The object and manipulator dynamics were established, respectively, and the two dynamics equations were combined by the acting force between the object and the end-effectors. 2 The disadvantage of the Lagrange multiplier method is that it relies on special approaches to determine the multipliers. Finding multipliers to obtain the explicit equations of motion for systems that have large numbers of degrees of freedom and a series of non-integrable constraints is often difficult. Therefore, eliminating the Lagrange multiplier is considered. A general computational scheme of the inverse dynamics of the closed-link mechanisms which is based on d’Alembert’s principle but without computing the Lagrange multiplier was proposed. 3 The scheme is computationally efficient compared to the conventional method, while the choice of the cut joints of the closed kinematic loops depends on the redundancy of the actuators. 4 Kane 5 proposed a general method to obtain the dynamical system’s equation of motion that originates from Gibbs and Appell’s quasi-coordinates. The equation of motion for the unconstrained planar dual-arm space robot was derived with Kane’s equation. 6 By inserting the constraint equations in terms of accelerations into the equations of motion for the unconstrained system, the reduced-order equations for the constrained system, which contain only independent motion variables, were obtained. Kane’s equation applies to holonomic and nonholonomic constraints and does not involve the Lagrange multiplier. However, Kane’s method has its disadvantage. It requires a suitable choice of problem-specific generalized speeds that relies largely on experience. Thus, partial velocities largely depend on a specific system. In addition, Kane’s equation is not a general closed-form dynamic equation.
Gibbs–Appell equations require a felicitous choice of problem-specific quasi-coordinates in dealing with systems with a large number of degrees of freedom and many non-integrable constraints. Compared to the Lagrange multiplier method, there is no need to determine the multiplier which is often very difficult to obtain for systems having a large number of degrees of freedom and many non-integrable constraints. Also, if using the formulations offered by Gibbs–Appell equations and Kane’s equation, proper quasi-coordinates will be required, but there is no such problem using the Udwadia–Kalaba approach.
It is well known that it is impossible to create a new fundamental principle for the theory of motion and equilibrium of discrete dynamical systems. In 1996, Firdaus Udwadia of the University of Southern California came up with a new multi-body dynamical modeling method called the Udwadia–Kalaba equation. This method can establish dynamical equations subject to holonomic and nonholonomic constraints in a relatively simple way. With this dynamical equation, the analytical expression of constraint force without Lagrange multiplier can be obtained; this is a significance breakthrough in the field of analytical mechanics.7–16 However, to date, this method has not been given much attention, and its main application is limited to dynamical modeling and control research of satellite systems. It has seldom been utilized in the field of robotics. A parallel robot dynamical model and a machine fish dynamical model were established through this method.17,18 A simple industrial robot subject to constraint dynamical model was established based on the Udwadia–Kalaba approach. 19 However, the generalized dynamical equation of multi-link manipulators was not established. So it is difficult to obtain the unconstraint dynamical equation of DACM.
The modeling process of the Udwadia–Kalaba equation involves three steps. First, in terms of the generalized coordinates, the unconstrained dynamical system whose equations of motion can be expressed with the traditional Lagrange method is considered. Second, the constraint equations are formed. Third, the additional generalized forces of constraint are imposed on the system. Specifically, the force resulting from the presence of constraints is added to the unconstrained system’s force.
The rest of this article is organized as follows. First, the Udwadia–Kalaba equation is briefly introduced. Second, the general equations of motion of n-link planar manipulators are presented and proven. They can be utilized to establish the dynamical equation of the unconstrained system conveniently. Third, the geometric constraint relationship is obtained from a new perspective. The motion path of the gripped object and the geometric constraint relationship are regarded as external constraint of DACM, and the dynamical equation is obtained based on the Udwadia–Kalaba equation. Finally, the numerical simulations are performed to demonstrate the efficacy of this method.
Udwadia–Kalaba equation
The general form of the dynamical equation of an industrial manipulator without constraint can be expressed as

in which
The unconstrained system is subjected to the

These

in which

in which

in which
The dynamical equation of the constraint to the multi-body mechanical system is shown as the following general form

Dynamic modeling of n-link planar manipulators
Review of partial derivative of a matrix with respect to a vector
Several basic concepts of matrix calculus should be reviewed to understand the following proof.
Theorem 1
When matrix

Theorem 2
When matrix

in which
General equations of n-link planar manipulators
As shown in Figure 1, it is a schematic of n-link planar manipulators. The system generalized coordinate is

Sketch map of n-link planar manipulator.
Result
The dynamical equation of n-link planar manipulators can be obtained as

in which the elements,

The elements,

The elements,

Proof
The equation of motion for the unconstrained multi-body systems using Lagrange method is given as 21

The kinetic energy

The

in which
The coordinates

Differentiating equation (18) with respect to time once yields
Thus,

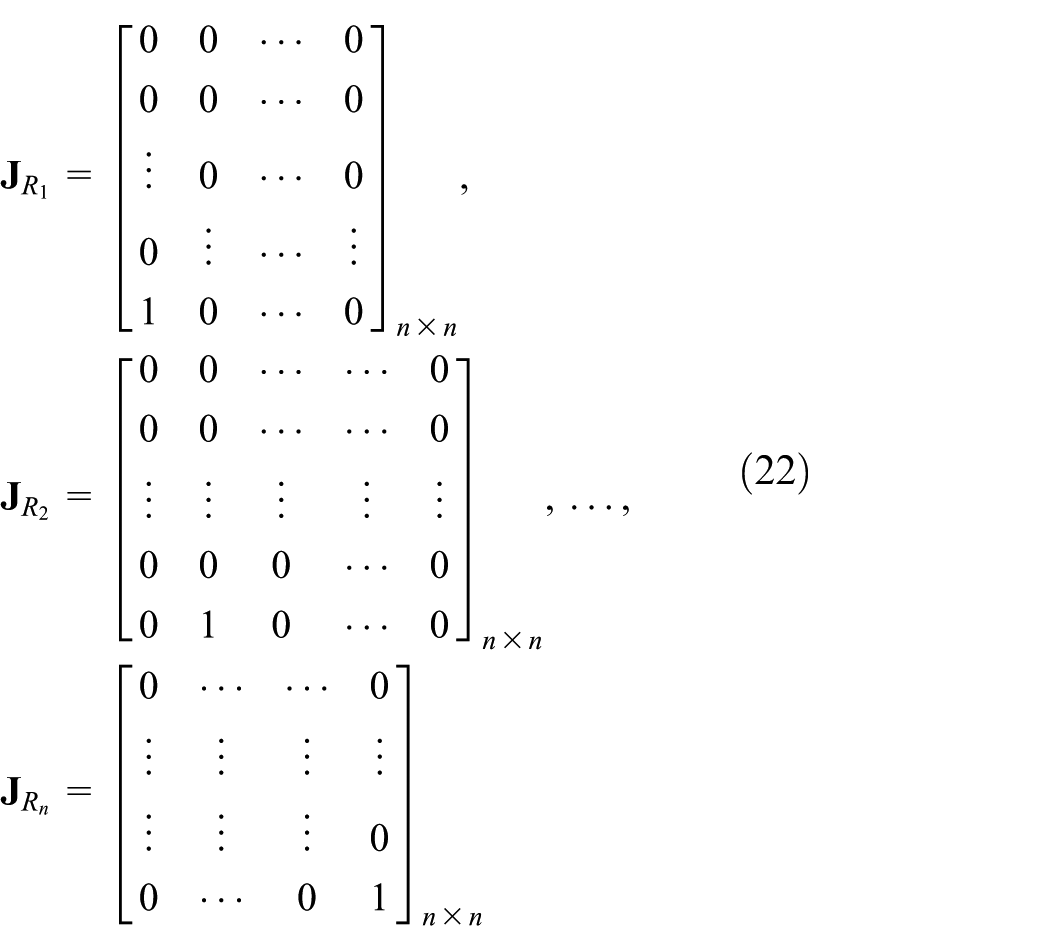
The angular velocity of links may be expressed as

Thus,
Substituting equations (20) and (22) into equation (17) yields equations (10) and (11).
Using equations (7) and (8), the partial derivative of the kinetic energy

in which

Substituting equations (24) and (25) into equation (23) yields


The partial derivative of the kinetic energy

The potential energy

The partial derivative of the potential energy
Substituting equations (27) and (28) into equation (15) yields

Thus, the following equation can be obtained as

in which



in which
Substituting equations (33)–(35) into equation (32) yields

Dynamic modeling and simulation of DACM
Dynamic modeling on manipulator without constraint
As shown in Figure 2, it is a schematic of two three-link robot manipulators carrying a bar.

Sketch map of DACM carrying a bar.

Sketch map of the relationship between the bar and the end-effectors.
As shown in Figure 2, the lengths of each link are assumed to be

in which
Then, the following dynamic equation is obtained, which is of the form

Given that the constraints have not been considered thus far,

Dynamics modeling subject to constraint
A generalized constraint relationship is proposed, namely, the left end-effector always points to the right end-effector. That is, the vector

in which

Then equation (40) is rewritten as

Hence

Because of

in which

Substituting equation (45) into equation (44) yields

According to the corresponding result of the numerator and denominator, we can get


Differentiating equation (47), equation (48) with respect to time twice results in

in which


The trajectory constraint of the bar is summarized as

in which
As shown in Figure 2, the following equation is also obtained

Differentiating equation (51) with respect to time twice

Differentiating equation (49) with respect to time twice

According to equations (52) and (53), the following constraint equation can be obtained as

in which


The following constraint equations are obtained, which are of the form of equation (3)

Then, the additional torques for the system to satisfy the given trajectory are explicitly determined by

in which
Finally, dynamic equation of the DACM is obtained as

Result and simulation analysis
It is assumed that the initial configuration are

Sketch map of the initial configuration of DACM carrying a bar.
The theoretical curve of the joint angles can be obtained by solving equations (47), (48), (50), and (51). It can be regarded as the reference curve for the following study. Figure 5 presents the joint angles at each joint of the robotic system, in which
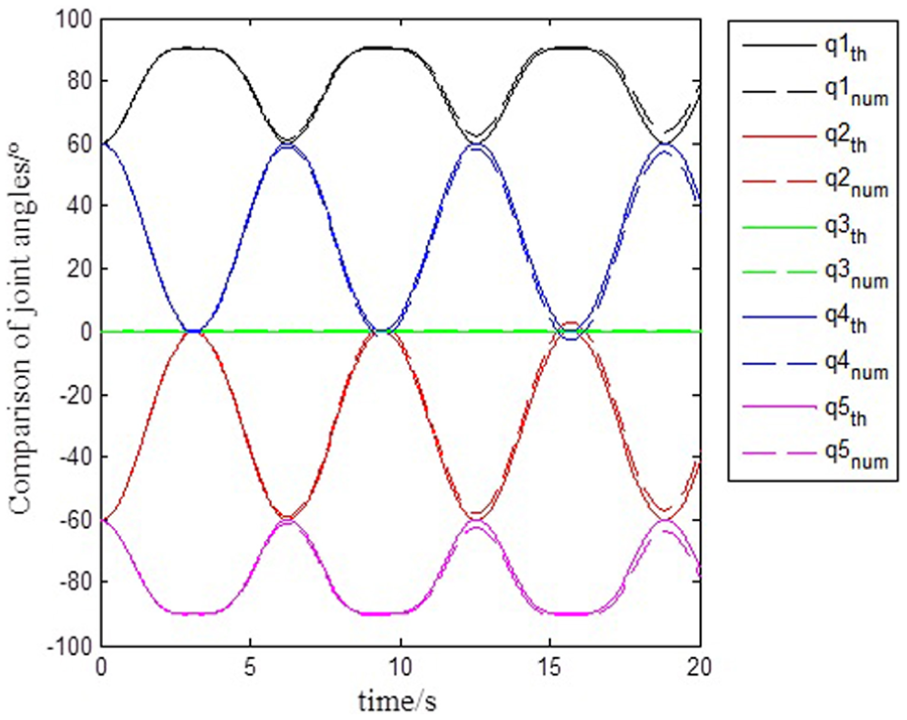
Sketch map of the joint angles.
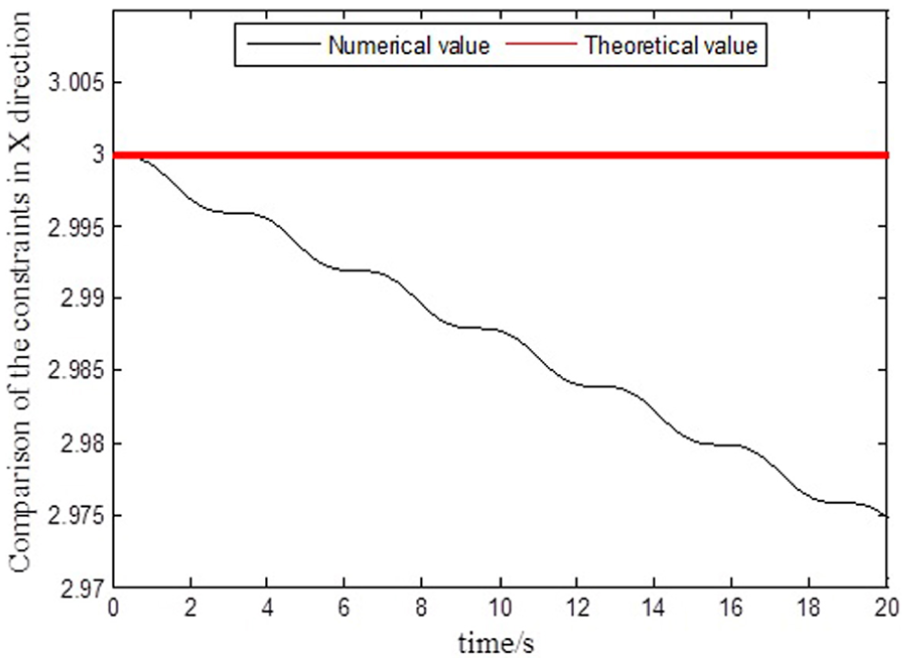
Comparison of the geometric constraint in the X-direction.
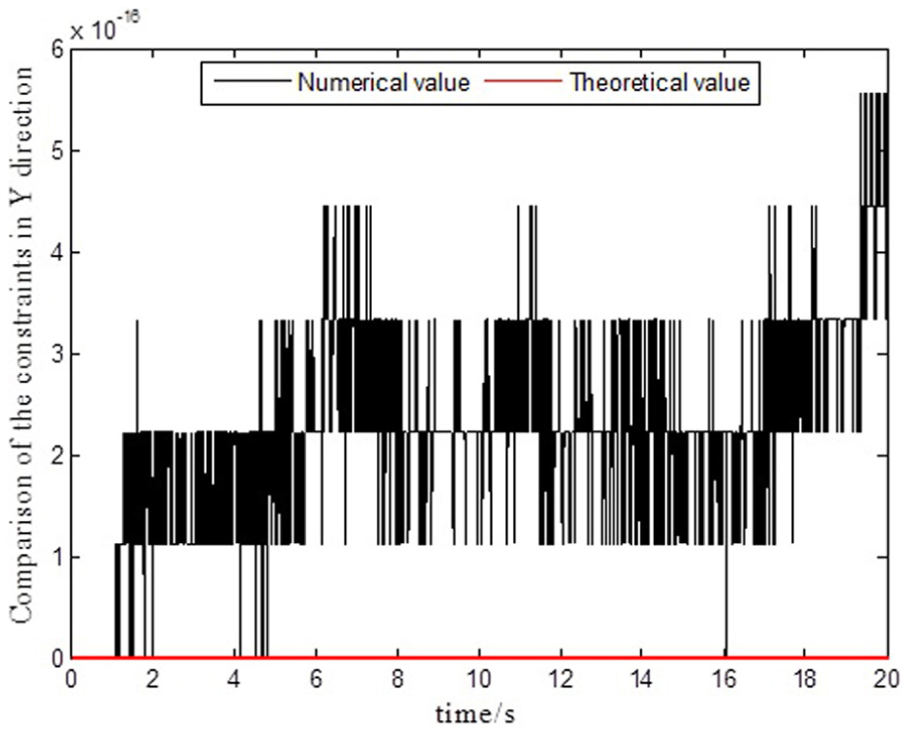
Comparison of the geometric constraint in the Y-direction.

Comparison of the trajectory constraint in the X-direction.

Comparison of the trajectory constraint in the Y-direction.
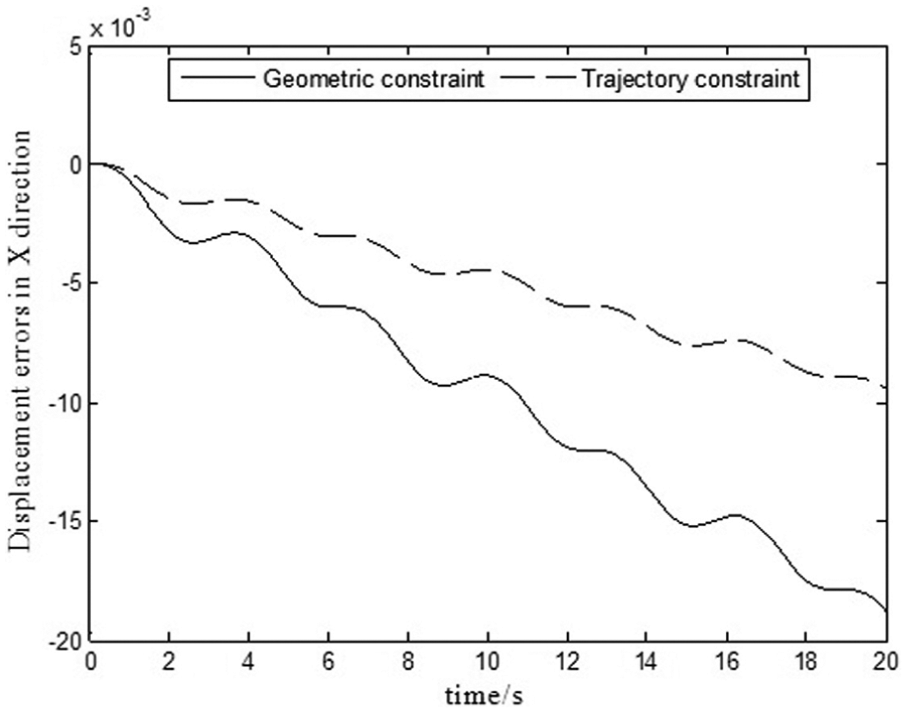
Displacement errors in the X-direction.
The DACM have six joints and every joint has one actuator. However, the system dynamic equation is obtained using five generalized coordinates and the degree of freedom of DACM is 3. That is to say, the servo control of the coordinated robot is actually a redundantly actuated problem. The additional torques

Then, the joint torques can be obtained as

in which the superscript + represents the Moore–Penrose generalized inverse.

Sketch map of the additional torque.

Sketch map of the joint torque.
Conclusion and future work
With the aim of dynamic modeling of DACM, this study establishes the dynamic equation based on the Udwadia–Kalaba equation. The research process results in several conclusions as follows:
The general dynamic equations of n-link planar manipulators are presented and proven to establish the dynamic equations of the unconstrained DACM.
The nature of the constraint is revealed by a generalized constraint relationship, and the analytical formula is obtained. The geometric constraint of the DACM and the trajectory of the bar are regarded as the external constraint of the system, and the constraint relationship of the system is integrated into the dynamic equation dexterously based on the idea of the Udwadia–Kalaba equation. The simple app-roach overcomes the disadvantage of obtaining dynamical equation from traditional Lagrange equation by Lagrange multiplier effectively.
The numerical simulation results prove that the dynamical equation established by this method conforms to reality largely. However, the simulation is executed on the condition which the initial condition satisfies the constrained equation, then the next research direction is the dynamics modeling of DACM which the initial condition does not satisfy the constrained equation and the error reduction of the dynamic modeling.
Footnotes
Academic Editor: Antonio Mendes Lopes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.