Reachability graphs can accurately reflect the state information of bounded Petri nets. However, the complexity of reachability graphs generation is exponential, which makes time waste and sometimes the computation may stop midway after a long time due to exhausted memory. Hence, this work presents combinatorics and resource circuit–based method to estimate the number of reachable states for a class of Petri nets–S3PR. First, by combinatorics, an upper bound of reachable states of an S3PR can be calculated. The upper bound is the sum of reachable states and unreachable states. Hence, the next step is to obtain the number of unreachable states. By analysis, it is found that there exists a close relationship between resource circuits and the unreachable states. Therefore, the number of unreachable states of an S3PR can be found by extracting all the resource circuits. Finally, the resulting number of subtracting the number of unreachable states from the upper bound is the expected result. In addition, example calculation and analysis are given to show the effectiveness of the proposed method.
Behavioral permissiveness is a very important criterion to evaluate the performance of a liveness-enforcing supervisor.1–4 Reachability trees (RT) and reachability graphs (RG) are powerful analysis tools to systematically investigate many characteristics of Petri nets, such as boundedness, liveness, and reversibility. For unbounded Petri nets, there exist infinite reachable states. RT5–7 can represent an unbounded Petri net by introducing a special symbol , to represent an infinite component in states. However, there exists the problem of reachability information loss caused by the usage of . RG cannot describe the complete behavior of an unbounded Petri net in a finite structure. However, it can provide complete reachability information for bounded Petri nets. This work mainly refers to S3PR, a class of bounded Petri nets. In an RG, there exist four zones:8 live zone, dangerous zone, bad zone, and deadlock zone. Among them, the state in the live zone is called a good state, which can always reach initial state. The states in the deadlock zone are all deadlocks. Without control, the states in the dangerous zone may reach bad even deadlock states. The states in the bad zone are called bad states, which will inevitably reach deadlock states. A liveness-enforcing supervisor with all good states is what we long for and called optimal supervisor.9–11 The RG of a Petri net is a graph that contains all states of the Petri net and shows the relationship between the states via enabled transitions.
By an RG, a suboptimal or optimal supervisor can always be obtained. The theory of regions is an effective approach, which depends on a complete enumeration of reachable states. It can definitely find an optimal liveness-enforcing supervisor if it exists.12 Uzam and Zhou13,14 use region analysis to an S3PR15 (System of Simple Sequential Processes with Resources) to obtain a nearly maximally permissive control policy. In Zhao and Hou,16 RG is used to synthesize non-blocking supervisor for G-systems by a divide-and-conquer method. It in general can lead to an optimal or a suboptimal liveness-enforcing supervisor. Binary decision diagrams (BDD) can represent large sets of reachable states with small shared data structures and implement the efficient manipulation on those sets. BDD is used by Chen et al.17,18 to represent the state space in order to overcome the state explosion problem.
The above RG-based methods can provide a suboptimal or optimal supervisor. However, the generation of RG is based on transition fire relationship and it contains the process of excluding repetitive states, which implies that it is a calculation with high computational complexity19 and reachability analysis is impossible by using the popular integrated net analyzer (INA)20 to analyze large Petri net models. It usually takes a very long time to complete the reachability analysis. In the worst case, it may stop midway due to insufficient memory.
Consequently, it is necessary to find an approach, with a low computational complexity and independent of generating RG via transition fire relationship, to enumerate the reachable states. The computational complexity of RG-based methods will reduce as the reduction of computational complexity of generating RG. Moreover, in order to avoid the fruitless calculation, it is necessary to predict the outcome before one conducts the state analysis. If the result shows that the state analysis will stop in vain, one would not conduct it. Combinatorics can realize the enumeration in a low computational complexity. By combinatorics, the upper bound of the reachable states and unreachable states of a Petri net can be found, which give us an opportunity to enumerate the reachable states in a low computational complexity. Furthermore, by combinatorics, the number of reserved legal states after adding monitors can be obtained, which is useful for checking the performance of a liveness-enforcing supervisor.
In the work by Hong and Chao,21 a method is proposed to enumerate the reachable states of marked graphs. As a model of flexible manufacturing systems (FMS), an S3PR is more general than a marked graph, and Chao et al.22 propose a method to enumerate reachable states for an S3PR. They obtain the reachable states by analyzing local states and integrating the local states to global states. However, the method only applies to the Kth order S3PR (with a top left side non-sharing resource place) although it can calculate the number of reachable states rapidly.
In our previous work, a method to calculate the reachable states of an S3PR is proposed, where an upper bound of reachable states is obtained by combinatorics and the number of unreachable states is excluded via siphons. The difference between them is the result to be desired. As an extended research, resource circuits are applied in this work instead of siphons to calculate the unreachable states. The calculated number of reachable states in the work is still an estimate value, which is equal or greater than the actual number. However, the calculated number is very close to the actual number of reachable states.
The rest of this article is organized as follows. Section “Preliminaries” presents the preliminaries used in this study. The three stages of the calculation of reachable states are introduced and the method is shaped to an algorithm in section “Estimate approach.” A well-known S3PR is used as an example to show the detailed calculation of the number of reachable states and a discussion is made in section “Example and discussion.” Finally, section “Conclusions and future work” concludes the article.
Preliminaries
Multisets
Definition 1
A multiset , is a mapping , which is represented as a formal sum , where A is a non-empty set and .
Basics of Petri nets
An ordinary Petri net is a 3-tuple where P and T are finite and non-empty sets. P and T represent the sets of places and transitions, respectively. is called a flow relation, denoted by directed arcs from places to transitions or from transitions to places.
A marking (also called a state) M is a mapping from P to ℕ. The number of tokens in place p is denoted by . A place p is marked at a marking M if . denotes the sum of tokens of all places in S, that is, , where . S is marked at M if . S is unmarked at M if . is called a net system or marked net and is called an initial marking of N. A state of a subset is denoted as , where denotes the number of tokens in place p of S. The sum of tokens of all places in S is denoted by , that is, . is called an initial state of S such that , .
Let be a node of . is called the preset of x and is called the postset of x. Similar notation extended to a set of nodes: given , , , , and .
A transition is enabled at a marking M if , and denoted as . Firing it yields a new state such that , , , , , , as denoted by . is called an immediately reachable state from M and M is called a closely previous reachable state of . A state is said to be reachable from M if there exist a sequence of transitions and states , and such that holds. The set of states reachable from M in N is called the set of reachable states of Petri net and denoted as . denotes the number of reachable states in .
A P-vector is a column vector indexed by P and a T-vector is a column vector indexed by T, where ℤ is the set of integers. The column vectors where every entry equals 0(1) are denoted by 0(1). is a integer matrix with . is the transposed versions of vector I. P-vector I is called a P-invariant if and and is the support of I. I is minimal if its support is not contained in the support of any other and its components are mutually prime. P-invariant I is a P-semiflow if its every element is non-negative. In this study, a P-semiflow that contains resources is denoted as a Pr-semiflow. denotes the set of reachable states of the support of P-semiflow I at the initial state . The number of reachable states in is denoted as . In this work, we use to denote vector I.
S3PR nets
A class of Petri nets called S3PR and first defined by Ezpeleta et al.,15 which stands for Systems of Simple Sequential Processes with Resources, is introduced via the following definitions.
Definition 2
A simple sequential process (S2P) is a Petri net where is the set of operation places, is the idle process place, N is a strongly connected state machine, and every circuit of N contains .15 An S2P with resources is a Petri net such that
The subnet generated by is an S2P.
and , where is called the set of resource places.
, , , , .
(a) , and (b) , .
.
In this work, we call a resource place a resource for short.
Definition 3
A system of S2PR, called S3PR for short, is defined as follows:15
An S2PR is an S3PR.
Let , , be two S3PR such that , , and . Then, the net resulting from the composition of and via defined as follows: (1) , (2) , (3) , (4) , and (5) is also an S3PR.
For , is called the set of holders of r.
Estimate approach
The method contains three stages: upper bound calculation, unreachable states determination, and exclusion. For the first stage, combinatorics is applied to calculate the upper bound of reachable states in a very low computational complexity. At the second stage, resource circuit is used to determine unreachable states. At last, the final result is obtained by deducting the number of unreachable states from the upper bound.
Upper bound estimation of reachable states
Theorem 1
The number of combinations to place k elements to m distinguishable containers is .23
Corollary 1
Let r be a resource and be a minimal Pr-semiflow with . Suppose that there are m places and k tokens in at the initial state , then the maximal number of possible reachable states of is .
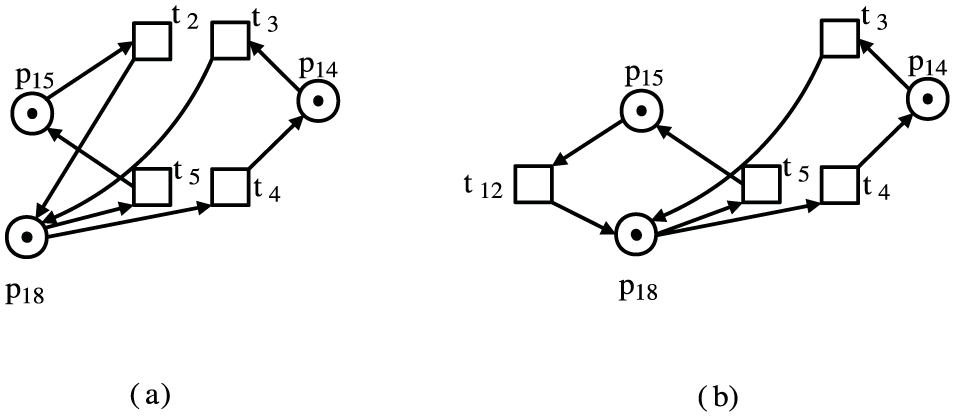
In an S3PR, a resource r and its holders make up the support of a minimal Pr-semiflow. The support is denoted as and the number of tokens in it is a constant. Similar to Theorem 1, suppose that there are k tokens and m places in , the maximal number of possible reachable states of is . For the net shown in Figure 1, , , and make up the support of minimal Pr-semiflow , where is a resource place. The number of tokens in it is constant 1. has two holders and . We can find that the maximal number of possible reachable states of is .
(a) An S3PR and (b) its subnet derived by a resource circuit.
Property 1
Based on the multiplication rule of combinatorics, the least upper bound (supremum) of the reachable states of an S3PR is the product of the maximal number of the possible reachable states of the support of each minimal Pr-semiflow contained in the S3PR, denoted as .
The places of an S3PR are made up of one or several supports of minimal Pr-semiflows. We suppose that the token distributions of the support of each Pr-semiflow are not affected by each other. And the numbers of tokens in idle places depend on the distributions of tokens in the supports of minimal Pr-semiflows. In this extreme case, according to the multiplication rule of combinatorics, we can find the least upper bound of reachable states of the S3PR.
There are five minimal Pr-semiflows in the S3PR shown in Figure 1(a). The maximal number of the possible reachable states of the support of each Pr-semiflow can be calculated through Corollary 1. By Property 1, we have
Obviously, not all the states in the upper bound are reachable due to the resource competition. In the next stage, we will present an approach to calculate the unreachable states.
Unreachable states exclusion
By experimental analysis, it is found that the unreachable states in the upper bound are related to resource circuits. The following definitions and theorems are proposed to determine the number of unreachable states of an S3PR.
Definition 4
Let be a set of resources in an S3PR . A simple circuit is called a resource circuit if (1) , ; (2) , ; and (3) . and are called the resource support and transition support of , respectively. is called the set of output transitions of RC.
In Figure 1(a), there are six resource circuits, exhibited in Figure 2 and listed as follows: and , , , , and .
Resource circuits of the net in Figure 1 (a): (a) RCa, (b) RCb, (c) RCc, (d) RCd, (e) RCe, and (f) RCf.
For an S3PR , there may exist unreachable states in . Consequently, we propose a method to exclude most or even all of the unreachable states.
Definition 5
Let and denote the sets of reachable states computed by Property 1 and actual reachable states of an S3PR , respectively. An unreachable state is a state that belongs to but not to . The set of unreachable states is denoted as .
Definition 6
Let be an S3PR with and . is called a subnet generated by if . is called a subnet derived by resource circuit RC, denoted as if there exists a resource circuit such that , , , where denotes the set of resource places in .
By Definition 6, the subnet derived by the resource circuit in Figure 2(f) is shown in Figure 1(b).
In this article, we suppose that the tokens in the support of any minimal Pr-semiflow of an S3PR stay in the resource originally. That is to say, .
Theorem 2
Let be a resource circuit of an S3PR and be the subnet derived from RC. is an unreachable state of derived by RC if , where .
Proof 1
We prove it by contradiction. Supposing that is reachable, there must exist being the set of closely previous states of in , where and . and indicates that and . At this moment, it is easy to find that , which contradicts the fact that is a Pr-semiflow and the number of tokens in its support is always a constant .
Hence, is an unreachable state of .□
The net shown in Figure 1(b) is a subnet of the S3PR in Figure 1(a), derived by resource circuit . and . , indicates that is an unreachable state of .
Corollary 2
Let and be two resource circuits of an S3PR such that , . and be the subnets derived by and , respectively. Supposing that there exist no unreachable state in derived by or in derived by . Then, is the resource circuit composed by and , is the subnet derived by and also composed by and . , is an unreachable state of derived by .
Proof 2
It is easy to conclude by Theorem 2.□
By Theorem 2, there exists no unreachable state of the subnet derived by the resource circuit either in Figure 2(d) or Figure 2(e) since and . However, . Hence, we can construct a resource circuit , as shown in Figure 3(a) composed by and , and construct a subnet derived by . is an unreachable state of . Similarly, the resource circuit in Figure 3(b) is composed by and and its corresponding unreachable state is .
The composed resource circuits: (a) RCd+e and (b) RCc+e.
Property 2
Let be a subnet of an S3PR , and M be the states of and , respectively, such that . Then, M is an unreachable state of if is an unreachable state of .
Definition 7
Let be a subnet of an S3PR and be an unreachable state of . is called the set of unreachable states of derived from .
Property 3
Let be an S3PR with n resources and and be a subnet of derived by a resource circuit RC. , where , , , and . Let be the least upper bound of reachable states of , we have .
Theorem 3
Let and be two resource circuits in an S3PR . , and be the subnets derived by and , respectively. and be two unreachable states in and obtained by and , respectively:
If , then and .
If , then .
If , , and , then .
If , then . Let and be the subnet composed by and , that is, , , , and , we have .
Proof 3
Since , by Theorem 2, it is easy to find that . By Property 3, indicates .
Similarly, since , it is easy to obtain that by Property 3.
It is proved by contradictions. Supposing that and . , , and indicate that . Hence, there must exists a resource r such that and . If , it is easy to conclude that , which implies that there exists an marking such that . At this moment, contradicts the fact that is a P-invariant and the number of tokens in is a constant . Consequently, is proved.
is used to denote for economy of space. For any , indicates that and indicates that . , , , and leads to . Hence, we have . Similarly, for any , implies that . Consequently, we have and .□
Theorem 3.1 indicates that if two different resource circuits have same resources, then the circuits have different unreachable states. Moreover, a subnet can be derived by the different resource circuits with same resources. Certainly, leads to .
Theorem 3.3 tells us that if two different resource circuits don’t belong to each other but have at least one shared resource, then the unreachable states derived by their subnets have no intersection.
Theorem 3.4 implies that if two resource circuits have no shared resource, then the unreachable states derived by their subnets have intersections, that is, same unreachable states can be found in calculating the number of unreachable states derived from the two circuits corresponding subnets. Hence, we should minus the intersections.
In this study, the number of reachable states of an S3PR is obtained by eliminating the unreachable ones from the least upper bound . Supposing that there are n resource circuits and composed resource circuits such that the subnets derived by them have unreachable states. In addition, there exist m couples resource circuits that share no resources. Then, leads to the desired result.
State estimate algorithm
The upper bound of reachable states and the unreachable states of an S3PR can be found via sections “Upper bound estimation of reachable states” and “Unreachable states exclusion,” respectively. The resulting number of subtracting the number of unreachable states from the upper bound is the number of reachable states obtained by the proposed method. In this subsection, the detailed method is shaped to an algorithm. In the following algorithm, the set of estimated reachable states of an S3PR by the proposed method is defined as and the number of elements in it is denoted as .
Estimation of reachable states for an S3PR.
Input: An S3PR .
Output:.
1. begin
2. , , calculate by Corollary 1.
3. Find by Property 1.
4. Find the set of resource circuits with in N by Definition 4.
5. ,
if there exists a resource circuit such that , .
6. such that ,
6.1 such that satisfies that ,
6.1.1 Construct a resource circuit composed by and ,
6.1.2 ,
6.2 .
7. .
8. ,
8.1 Construct a subnet derived by ,
8.2 Calculate ; .
9. while,
9.1. Choose a resource circuit from ; ,
9.2. if there exists a resource circuit in such that , , and ,
9.2.1 Construct a subnet composed by and ,
9.2.2 Calculate ,
9.2.3 .
10. .
11. Output .
12. end
Here, we take the S3PR in Figure 1(a) as a simple example. Based on section “Upper bound estimation of reachable states,” we have . By Definition 4, six resource circuits can be found and shown in Figure 2. Accordingly, six subnets can be derived by the circuits. By Theorem 2, it is found that there exist unreachable states in the subnets derived by the resource circuits in Figure 2(a), (b), and (f). By Corollary 2, it is found that there exist unreachable states in the subnets derived by the resource circuits in Figure 3(a) and (b). By Property 3, it is found that since , , and . It is found that there exists at least a shared resource for any two resource circuits. Hence, by Theorem 3, we can conclude that there exists no intersection of unreachable states. Hence, we can obtain that . Consequently, . In fact, the actual number of reachable states is 282. That is to say, for this example, the calculated number by the proposed method is equal to the actual value.
Example and discussion
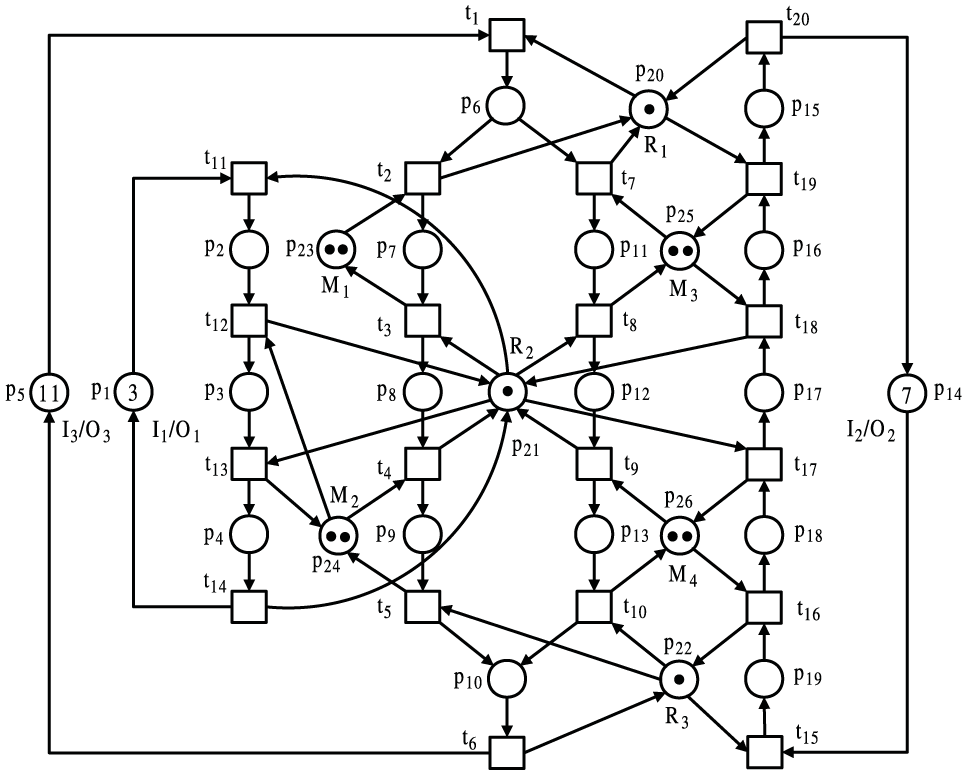
The net shown in Figure 4 is a well-known model for an FMS,15 where , , and .
The Petri net model of an FMS.
There are seven resources in and , , obtained by Corollary 1, are shown in Table 1. By Property 1, we have . Hence, 34,992 is the least upper bound of reachable states of .
Calculations of .
Calculation
The next stage is to calculate the number of unreachable states of . There exist eight resource circuits in , shown in Figure 5 and listed as below:
By Theorem 2, there exist unreachable states in the subnets derived by , , , , , and , but not and since , , and . However, it is found that . Hence, by Corollary 2, the subnet derived by , composed by and , have unreachable states. Consequently, we have .
The resource circuits of (N, M0): (a) RCa, (b) RCb, (c) RCc, (d) RCd, (e) RCe, (f) RCf, (g) RCg, and (h) RCh.
By Property 3, the number of unreachable states derived by the resource circuit corresponding subnets is displayed as follows:
It is found that , , , and . By Theorem 3.4, we have , , , and .
Consequently, we have .
Compared with the existing method, the proposed one can calculate an upper bound of the number of reachable states of an S3PR in a short time, especially for a net system with a large initial state (in number of tokens). INA is a widely used tool, which can provide behavioral and structural information of Petri nets. Its abilities are far beyond to provide the number of reachable states of a Petri net. In this work, INA is used to compare with the proposed method only from the point of calculating the number of reachable states. Here, INA and the proposed method are applied to compute the number of reachable states of the S3PR in Figure 4 with different initial states. The proposed method is conducted via a software package developed by our group. The calculations are carried out on a computer in Windows XP operating system with Pentium(R) Dual-Core CPU 3.0 GHz and 4 GB memory and the result is shown in Table 2. The first and the second columns show the numbers and the initial states of the marked nets, respectively. The actual numbers of the reachable states obtained by INA and the elapsed time are listed in the third and fourth, respectively. Similarly, the fifth and sixth present the estimate numbers obtained by the proposed method and theirs elapsed time. Besides, “–” in the last line indicates that the computer runs out of memory.
Efficiency comparison between INA and the proposed method.
No. of marked net
Initial state of resources
INA
Proposed
No. of states
Time
No. of states
Time (s)
1
{1, 1, 1, 2, 2, 2, 2}
26,750
5.30 s
29112
0.063
2
{1, 1, 2, 2, 2, 2, 2}
53,822
10.82 s
58278
0.062
3
{1, 2, 2, 2, 2, 2, 2}
216,906
1 min 03 s
223518
0.063
4
{2, 2, 2, 2, 2, 2, 2}
449,160
4 min 18 s
460632
0.063
5
{3, 2, 2, 2, 2, 2, 2}
758,832
11 min 34 s
776852
0.064
6
{3, 3, 2, 2, 2, 2, 2}
2,085,882
6 h 25 min
2176776
0.063
7
{3, 3, 3, 2, 2, 2, 2}
3,479,022
22 h 43 min
3516568
0.063
8
{3, 4, 3, 3, 3, 3, 3}
–
–
99630520
0.063
INA: integrated net analyzer.
It is found in Table 2 that the elapsed time of the calculation by INA increases as the net initial state increases. It will cost a very long time when using INA to deal with a large marked net system and in the worst case, reachability analysis may stop midway due to exhausted memory. Instead, the elapsed time for obtaining the number of reachable states by the proposed method is very short. Meanwhile, the elapsed time is a constant; in other words, it does not increase as the initial state increases since the calculation mainly refers to algebraic operations, such as multiplication, addition, and subtraction. Hence, we can conclude that the proposed method is not sensitive to the initial state and then can be applied for handling large marked net systems.
Conclusion and future work
This study presents a theory to enumerate the reachable states for an S3PR including three stages: upper bound calculation, unreachable states determination, and exclusion. In order to reduce the computational complexity, based on the fact that an S3PR is composed by several supports of P-invariants, combinatorics is applied to calculate the number of states, including upper bound and unreachable states. Besides, resource circuits are used to determine the unreachable states in the upper bound. The theory is fairly effective that most even all unreachable states can be derived.
The theory can be used to predict the scale of reachable states of a net system to avoid wasting time on the calculation without results. Moreover, the number of reserved legal states after adding monitors for plant models can be obtained by the theory, which is useful for checking the performance of a liveness-enforcing supervisor. Furthermore, the future work will focus on calculating accurate number of reachable states. Once the accurate number of reachable states can be calculated by combinatorics, all reachable states can be enumerated accordingly. Hence, it will be an important basis of generating RG by combinatorics in a low computational complexity. Besides, note that the proposed method cannot be applied to more complex classes of Petri nets. Hence, further work is to improve the theory to realize accurate calculation and generalization.
Footnotes
Academic Editor: Jiacun Wang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by the National Natural Science Foundation of China under Grant No. 61301276, the Natural Science Basic Research Plan in Shaanxi Province of China under Grant No. 2015JQ6258, the Scientific Research Program Funded by Shaanxi Provincial Education Department under Grant No. 15JK1297, and the Discipline Construction Funds of Xi’an Polytechnic University under Grant No. 107090811.
References
1.
EsparzaJ.Reachability in live and safe free choice Petri nets is NP-complete. Theor Comput Sci1998; 198: 211–224.
2.
IchikawaAYokoyamaKKurogiS.Control of event-driven systems: reachability and control of conflict-free Petri nets. Trans Soc Instrum Control Eng1985; 21: 324–330.
3.
UzamMGelenG. Comments on “supervisor design to enforce production ratio and absence of deadlock in automated manufacturing systems.”IEEE T Syst Man Cy A2014; 44: 1455–1456.
4.
WangSGWangCYZhouM.Controllability conditions of resultant siphons in a class of Petri nets. IEEE T Syst Man Cy A2012; 42: 1206–1215.
5.
PatelAMJoshiAY.Modeling and analysis of a manufacturing system with deadlocks to generate the reachability tree using Petri net system. Proced Eng2013; 64: 775–784 (also published in International conference on design and manufacturing).
6.
WangSGZhouMCGanMD. New reachability trees for unbounded Petri nets. In: Proceedings of the 2015 IEEE international conference on robotics and automation, Seattle, WA, 26–30 May 2015, vol. 2, pp.3862–3867. New York: IEEE.
7.
WangSGGanMDZhouMC. A reduced reachability tree for a class of unbounded Petri nets. IEEE/CAA J Automat Sin2015; 2: 345–352.
8.
LiZWWuNQZhouMC.Deadlock control of automated manufacturing systems based on Petri nets: a literature review. IEEE T Syst Man Cy C2012; 42: 437–462.
9.
LiZWZhouMCJengMD.A maximally permissive deadlock prevention policy for FMS based on Petri net siphon control and the theory of regions. IEEE T Autom Sci Eng2008; 5: 182–188.
10.
MaZYLiZWGiuaA.Design of optimal Petri net controllers for disjunctive generalized mutual exclusion constraints. IEEE T Automat Contr, 2015, http://dx.doi.org/10.1109/TAC.2015.2389313
11.
XingKYTianFXuHB. Optimal polynomial complexity deadlock avoidance policies for manufacturing systems with flexible routings. In: Proceedings of the IEEE international conference on automation science and engineering, Shanghai, China, 8–10 October 2006, pp.448–453. New York: IEEE.
12.
GhaffariARezgNXieXL.Design of a live and maximally permissive Petri net controller using the theory of regions. IEEE T Robotic Autom2003; 19: 137–142.
13.
UzamMZhouMC.An improved iterative synthesis method for liveness enforcing supervisors of flexible manufacturing systems. Int J Prod Res2006; 44: 1987–2030.
14.
UzamMZhouMC.An iterative synthesis approach to Petri net-based deadlock prevention policy for flexible manufacturing systems. IEEE T Syst Man Cy A2007; 37: 362–371.
15.
EzpeletaJColomJMMartinezJ.A Petri net based deadlock prevention policy for flexible manufacturing systems. IEEE T Robotic Autom1995; 11: 173–184.
16.
ZhaoMHouYF. A divide-and-conquer method for the synthesis of non-blocking supervisors for flexible manufacturing systems. In: Proceedings of the IEEE international conference on automation science and engineering, Taipei, Taiwan, 18–22 August 2014, pp.455–460. New York: IEEE.
17.
ChenYFLiZWKhalguiM. Design of a maximally permissive liveness-enforcing Petri net supervisor for flexible manufacturing systems. IEEE T Autom Sci Eng2011; 8: 374–393.
18.
ChenYFLiuDLiuGY. Computation of resource circuits of Petri nets by using binary decision diagrams. In: Proceedings of the 5th international conference on modeling, simulation and applied optimization, Hammamet, Tunisia, 28–30 April 2013, pp.1–6. New York: IEEE.
19.
LiptonRJ.The reachability problem requires exponential space. Research report 62, 1976. New Haven, CT: Department of Computer Science, Yale University.
20.
StarkePH.Integrated net analyzer (INA). Handbuch, 1992.
21.
HongLChaoDY.Enumeration of reachable states for arbitrary marked graphs. IET Control Theory A2012; 6: 1536–1543.
22.
ChaoDYYuTHWuSC. Closed form formula construction to enumerate control related states of K-th order S3PR system (with a top left side non-sharing resource place) of Petri nets. In: Proceedings of the 2014 IEEE 11th international conference on networking, sensing and control, Miami, FL, 7–9 April 2014, pp.132–137. New York: IEEE.
23.
RobertsFSTesmanB.Applied combinatorics. Oxford: Taylor & Francis, 2009.