
Abstract
In view of the good machining performance of traditional three-axis nonuniform rational basis spline interpolation and the space cutter compensation issue in multi-axis machining, this article presents a triple nonuniform rational basis spline five-axis interpolation method, which uses three nonuniform rational basis spline curves to describe cutter center location, cutter axis vector, and cutter contact point trajectory, respectively. The relative position of the cutter and workpiece is calculated under the workpiece coordinate system, and the cutter machining trajectory can be described precisely and smoothly using this method. The three nonuniform rational basis spline curves are transformed into a 12-dimentional Bézier curve to carry out discretization during the discrete process. With the cutter contact point trajectory as the precision control condition, the discretization is fast. As for different cutters and corners, the complete description method of space cutter compensation vector is presented in this article. Finally, the five-axis nonuniform rational basis spline machining method is further verified in a two-turntable five-axis machine.
Keywords
Introduction
For five-axis computer numerical control (CNC) system without space cutter compensation, to determine the cutter parameters and define the corresponding position of the origin of the workpiece coordinate system on the machine is a prerequisite for the preparation of machining program. Therefore, when there is any change in cutter radius or length due to cutter wear or change during processing, the five-axis machining must be reprogrammed to ensure accuracy, which has brought great inconvenience to the five-axis machining and thus confined its application and popularization. Hence, equipping the five-axis CNC system with space cutter compensation is of great significance for improving its processing efficiency and precision. 1
To make the machining program as irrelevant as possible with the cutter radius and length is the purpose of the CNC system’s cutter compensation function. The application of cutter compensation in the 2.5D machining is relatively mature now, and it is characterized with constant cutter axis (CA) vector position, relatively clear relationship between cutters and workpieces, and easily accessible cutter compensation. Because the CA vector changes with processing position in the five-axis machining, cutter compensation ought to be carried out in space, and the compensation process is more complicated. To solve the problem of space cutter compensation, the following problems must be addressed first:
During the design of the space cutter compensation algorithm, the changes in the CA position and orientation must be taken fully into account.
During five-axis CNC machining, different types of machine structure correspond to different kinematic models. Before the design of the space cutter compensation algorithm, the ways in which CA position and orientation and other variables are described should be determined.
For complexly shaped workpieces, a comprehensive approach to dealing with the space corner transition is needed.
C Tung and Tso 2 and SR Liang and Lin 3 proposed the three-dimensional cutter compensation methods based on computer-aided manufacturing (CAM), and such methods rely on the strong performance of computers, which meant that they were relatively difficult to be realized in the numerical control system and unlikely to meet the requirements for compensation being real time and efficient. DN Moreton and Durnford 4 and YD Chen et al. 5 investigated the space cutter compensation methods of three-axis machining and five-axis machining, respectively, but they were targeted exclusively at ordinary linear interpolation. Also, they achieved automatic adjustment of the cutter’s offset amount by adding an additional cutter contact (CC) point vector, while the cutter radius changed. L Han et al. 1 proposed a high-efficient space cutter radius compensation method of multi-axis end milling, which was to extract cutter trajectory from the small-segment processing program and then achieve radius compensation in the normal direction of the trajectory. However, the method has a large amount of numerical control (NC) program code entry, and restricting the compensation direction to the trajectory normal is not conducive to optimizing machining procedures. Z Qiao et al. 6 proposed the dual nonuniform rational basis spline (NURBS) interpolation algorithm for five-axis machine and described the movement of the cutter tip point and the changes in the CA vector, respectively. Combining them with the rotational tool center point (RTCP) technology, the real-time control of nonlinear errors for five-axis machine tools with different structures is possible. However, this method does not consider the space cutter compensation and, therefore, cannot really achieve the NURBS interpolation control of five-axis machine.
In order to meet the requirements of five-axis NURBS interpolation for high precision and smoothness of tool path and improve the accuracy of the five-axis NURBS interpolation data, this article presents a triple NURBS five-axis interpolation method that could simultaneously describe the trajectory of the CA vector of five-axis NURBS interpolation and the space cutter compensation vector, in order to promote the application of five-axis NURBS interpolation. Based on this, the complete description of the system on the basis of the space cutter compensation reveals the ways different cutters handle the space corner transition, making the above-mentioned method more commonly used.
In addition, the NURBS is used to describe the processing information and workpiece information; the CNC system directly decodes and interpolates the NURBS data. The resulting path is closer to the original surface. 7 Meanwhile, using the NURBS format also greatly reduces the number of processing codes, so that this method can greatly improve the machining accuracy and efficiency.
Triple NURBS model
Definition of the triple NURBS curves
In order to describe the motion trajectory of the CA vector in the workpiece coordinate system and the space cutter compensation vector, this article presents the concept of triple NURBS curves. The triple NURBS curves are three NURBS curves with the same knot vector and degree but different control points and weights. The first

where

Because the three curves use the same knot vectors, the triple NURBS curves can be seen as a nine-dimensional NURBS curve in mathematical representation and follow-up solving. So, the triple NURBS curve can be expressed as

where
To further simplify and make it easier to understand, this article introduces the homogeneous coordinate representation of the triple NURBS curves

where

Five-axis processing trajectory with cutter compensation vector using the description of triple NURBS curves.
In order to provide the CNC with complete cutter radius and length compensation information, an additional third NURBS curve is used to describe the CC point’s vector. Compared with the traditional methods of cutter compensation vector description, it has the following advantages:
Using the NURBS curve to describe the changes of the CL point, the CA vector, and the CC point vector, the cutter processing path can be described more accurately and smoothly. Then, the final machining accuracy can be improved by ensuring the accuracy of the processing data.
Compared with the traditional method of the five-axis space cutter compensation data description, the triple NURBS curve has more accurate data information and a smaller amount of data input.
The triple NURBS interpolation method can effectively combine with the RTCP technology, thus developing a highly precise and efficient NURBS interpolation method, which is complete and suitable for multi-axis processing.
The NURBS curve is continuously differentiable within the knots, so is the curve of the offset CL point within the knots, which means that the cutter motion trajectory is also a smooth NURBS curve.
The motion curve of the offset CL point is smooth and continuous, without the need to take into consideration the transition between segments in traditional space cutter compensation.
Discretization of triple NURBS curves
In order to achieve high-precision interpolation of the triple NURBS curve and rapid equal error discretization of the NURBS curve, this article first decomposes the NURBS curve into three piece-wise rational Bézier curve representation and then conducts the discretization of the piece-wise Bézier curves. As the triple NURBS curve can be treated as a 12-dimensional B-spline curve, it only needs to compute the piece-wise Bézier curve representation of the 12-dimensional B-spline curve. De Casteljau algorithm is employed in the discrete process. 9 To simplify the discrete process and increase the universality of the algorithm, this article adopts the method of discretization of Bézier curve at the parameter midpoint. In other words, for each Bézier curve with standard parameter, if it cannot comply with the requirement of discrete error, the curve will be subdivided at parameter point u = 0.5 to produce two new Bézier curves with standard parameter, until the precision requirement is met. Figure 2 shows the general process of De Casteljau algorithm. It can be observed that the discretization of Bézier curve becomes the process of continuously generating control polygons which are closer to the curve using midpoint segmentation algorithm.
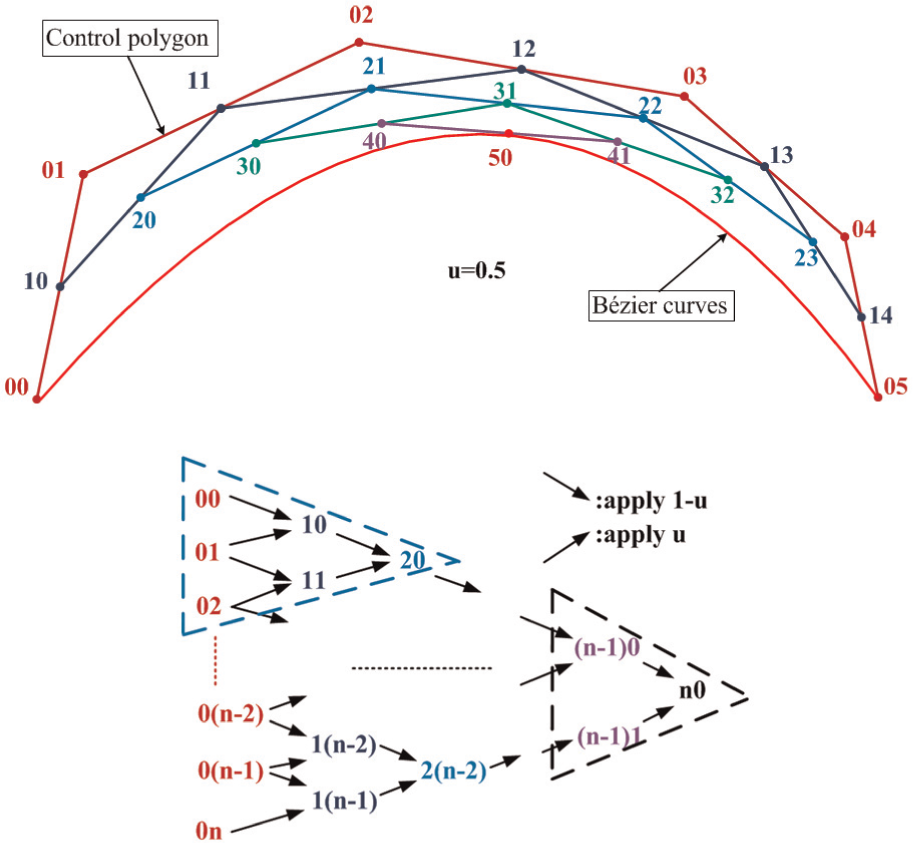
General process of De Casteljau algorithm.
Because the discrete process is carried out in the four-dimensional Euclidean space of the triple NURBS curve, the chord error for checking the discrete accuracy is defined in the three-dimensional space. Therefore, the discretization of the triple piece-wise rational Bézier curve should obey the following principles:
The discrete accuracy of the triple NURBS curve is determined by the accuracy requirement of
When checking the discrete accuracy of the piece-wise rational Bézier curve determined by the CC point trajectory, we need to project Bézier points in the three-dimensional space and check them in accordance with the requirement of trajectory error in real-world processing;
The discrete processes of three piece-wise rational Bézier curves are synchronized. When the requirement of discrete accuracy of
To further simplify the algorithm and increase computing accuracy, the termination condition of the segmentation of the Bézier curve is defined as follows: the distance of Bézier points corresponding to each Bézier curve segment from both ending points of the segment should be smaller than the set control precision. It can be concluded using the convex hull of Bézier curve that using this condition, the chord error of the Bézier curve after discretization is smaller than required in the given control accuracy.
Description of space cutter compensation
Description of the data information of five-axis space cutter compensation
In the five-axis motion control system with RTCP function, since the control system can automatically transform the cutter position and orientation information under the workpiece coordinate system into the motion volume of each axis in machine under the machine coordinate system, the calculation of five-axis space cutter compensation in such systems is carried out under the workpiece coordinate system. Therefore, the calculation of five-axis space cutter compensation only needs to recalculate the CL point position based on the CC point vector and current cutter parameter under the workpiece coordinate system. 10
The length compensation of space cutter is an offset with the distance of
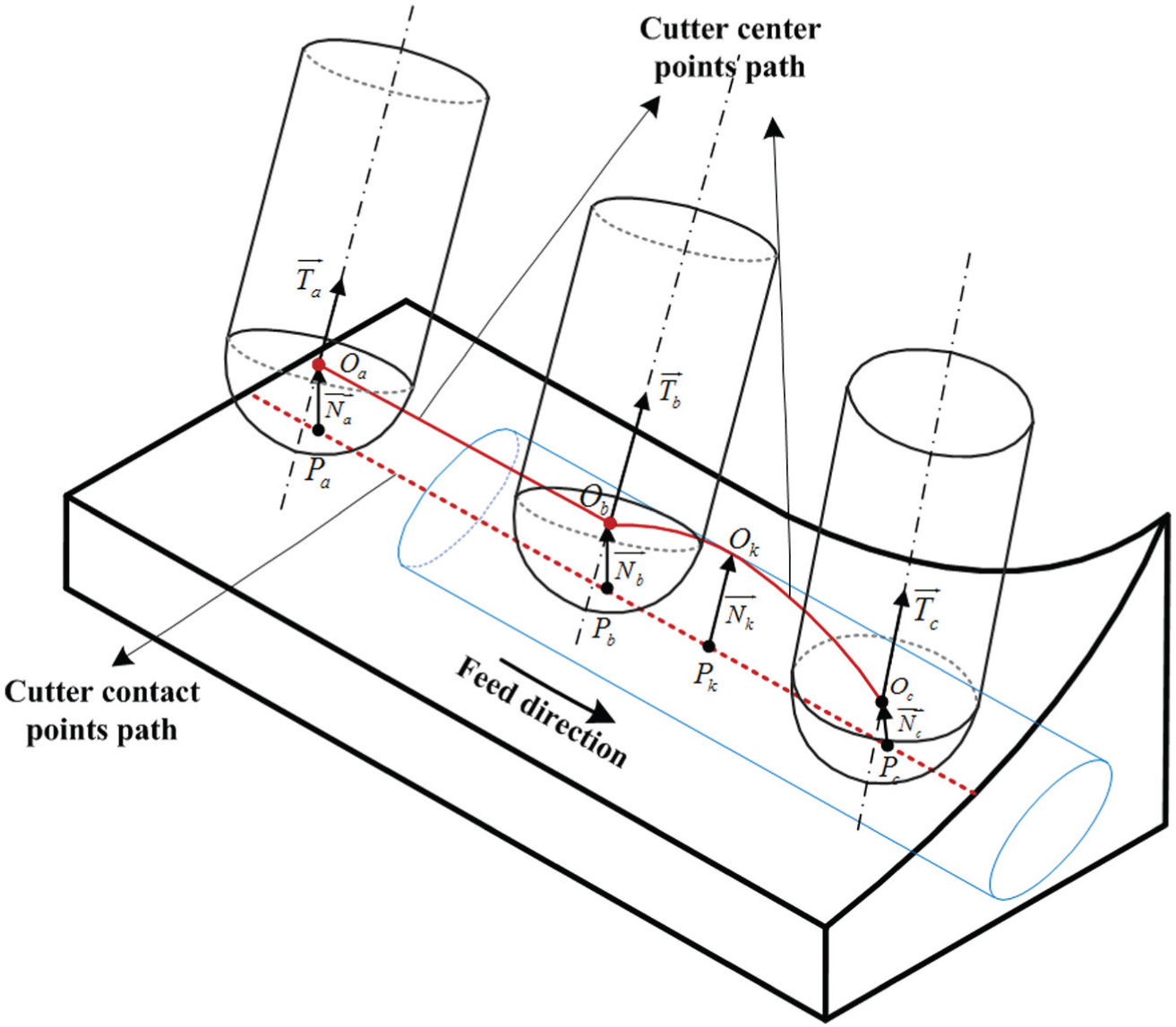
As shown in Figure 3,

CA control manner during the five-axis end milling.
Similar to the three-axis milling, three types of cutter are usually used when processing surfaces with the five-axis CNC machine. As shown in Figure 4,

Types of five-axis milling cutter: (a) flat-end cutter, (b) ball-end cutter, and (c) fillet-end cutter.
In addition, to better illustrate the relationship between CL point and CC point, as shown in Figure 5, assuming that the CC point is denoted by

Compensation trajectory of ball-end cutter.
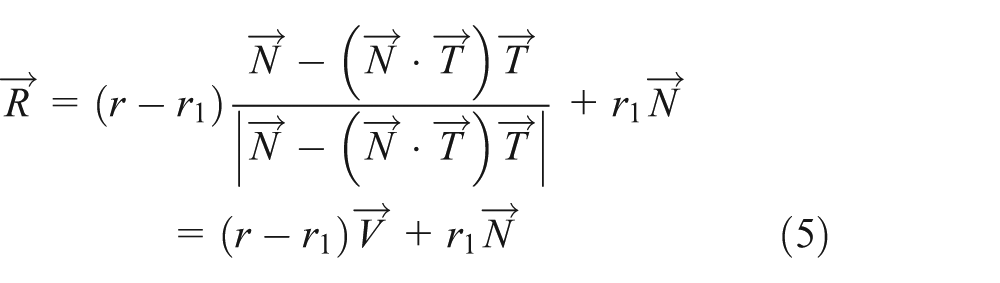
Since the flat-end and ball-end cutters are the special cases of fillet-end cutter, we just need to analyze the latter one. As shown in Figure 4(c),
Cutter radius compensation without corner transition
A CC point trajectory
Ball-end cutter
If

Flat-end and fillet-end cutters
As the contact parts between flat-end and fillet-end cutters and the workpiece are constant, the relative relationship between CC point and the compensated CL point is also fixed. If
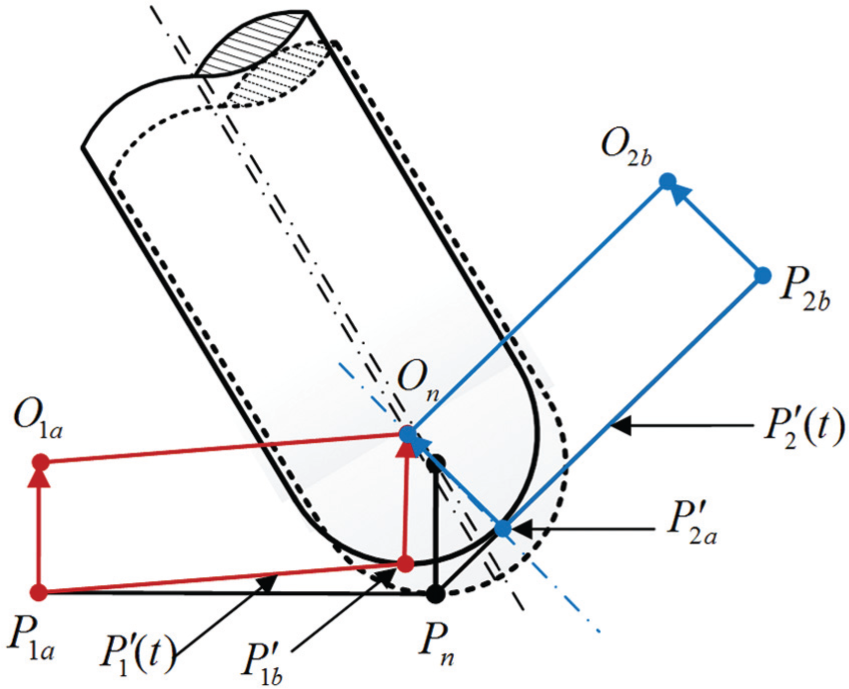
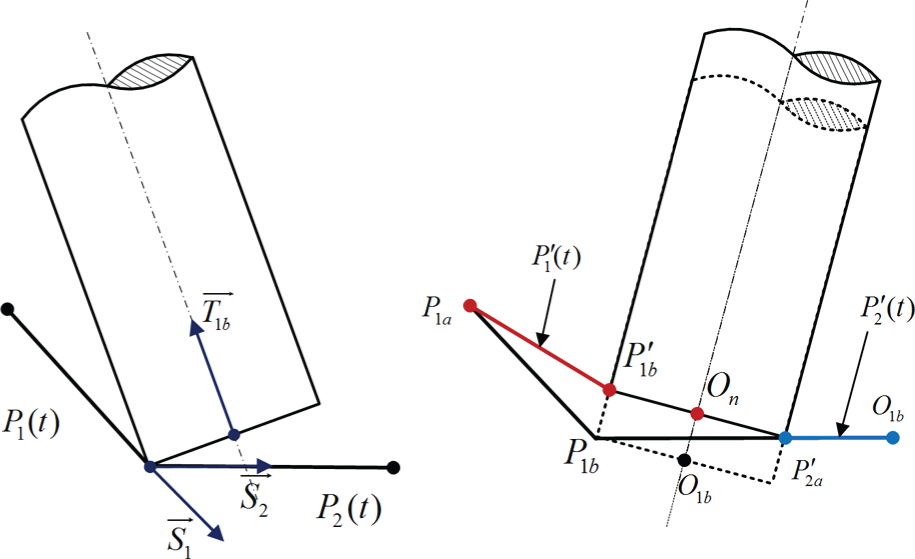
Cutter radius compensation with corner transition
If there is a corner in the workpiece, the starting point vector of the trajectory before the corner is denoted as
Let
Outer corner (
Inner corner (
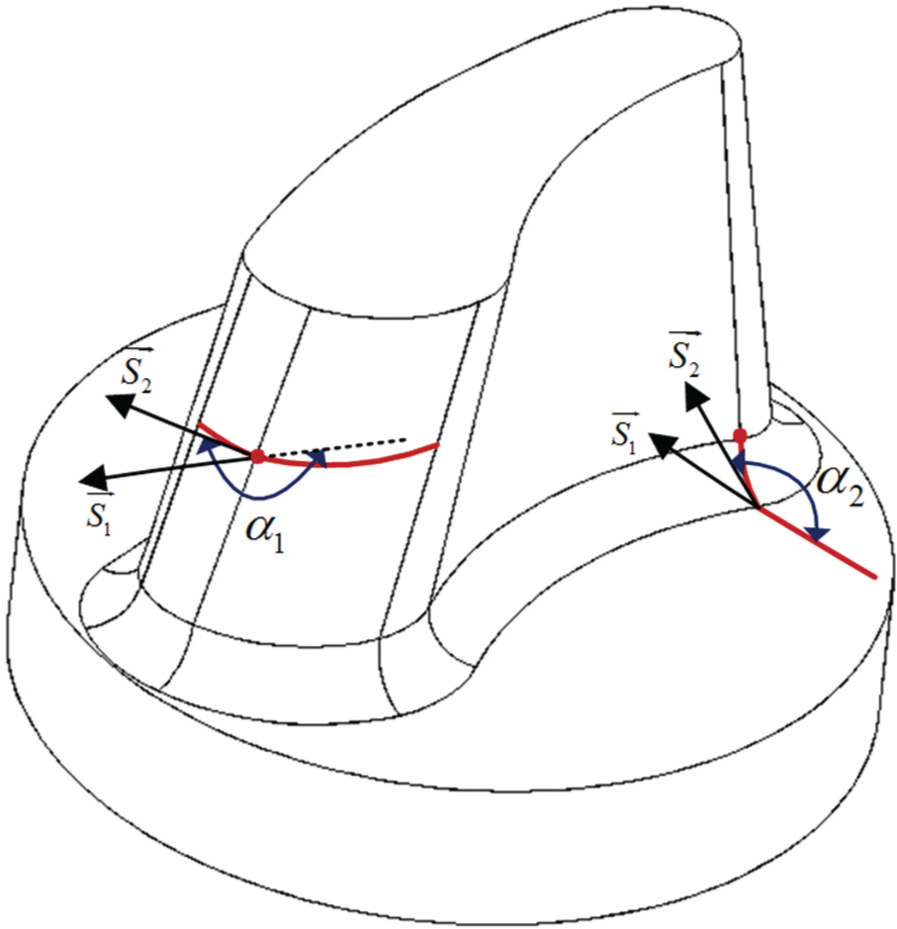
Types of the corners.
Transitional processing of the outer corner
Assume that
Ball-end cutter
As can be seen from Figure 7, the trajectory of the CL point after compensation is a circular arc with

Outer corner transition of ball-end cutter.
Flat-end cutter and fillet-end cutters
If
Transitional processing of the inner corner
Ball-end cutter
As depicted in Figure 8, dashed lines are to show that the interference the cutter position has with

Transitional processing of the inner corner with ball-end cutter.
Flat-end cutter
In the two circumstances illustrated in the left side of Figure 9, when the cutter is moving to

Transitional processing of the inner corner with flat-end cutter.
As can be seen from the right side of Figure 9, cutter position denoted by the dashed line interferes with

Fillet-end cutter
While processing the interference of fillet-end cutter, the traveling distance along the CA is the superposition of ball-end and flat-end cutters. The CAM system generates the initial triple NURBS machining program for the initial cutter according to the above process, while the space cutter compensation in CNC system is based on this initial program. Since the tool path and dealing with anti-interference of the compensated program are the same as the initial one, this compensation method is applicable to the tool whose radius and length change vary slightly from those of the initial cutter, for example, the radius change caused by cutter abrasion, the length change generated by cutter mounting, and so on.
Experiment and discussion
To validate the proposed method of using triple NURBS curve to illustrate five-axis processing trajectory, surface data extracted from the blade model was used. Triple NURBS curve special for blade processing was generated through certain CAM approach as shown in Figure 10(a) and (b). All axis motion data fitting the two-turntable five-axis machine were produced using the rapid discretization method mentioned in this article and the common RTCP algorithm.

The CAD model and experiment process: (a) CAD model, (b) CAM data processing, (c) machining and measurement, and (d) measuring method and positions.
In order to reduce machining error, this experiment used the easy cutting nylon bar, whose mechanical property is stable. The workpiece surface after machining was closer to the theoretical value. During the experiment, initial data were generated using ball-end cutters, 4 mm in radius, at the feeding rate of 3000 mm/min and with feed rate of 1 mm/r. When the 5-mm cutter was used for replacement during the process, the initial date could be modified according to space cutter compensation method mentioned in this article (permissible error: ±0.01 mm), and the modified data were used for processing.
In order to verify the method, three workpieces were machined and measured in turn. The measurement method was as follows: without dismantling the workpiece after it was machined, the upper surface was made parallel to the X–Y plane while the Z, A, and C axes were fixed. Record the Y-axis coordinate value of the points, which were starting from the origin point of X-axis and extending to the positive and negative directions at 5-mm intervals (Figure 10(c) and (d)), on both sides of the workpiece with the online measurement probe and make subtraction calculation (
Y-axis coordinate difference value of the two points.

Conclusion
This article focuses on the study of space cutter compensation technology of five-axis machine and proposes the triple NURBS curve path description method fitting the five-axis processing. With this method, the cutter position and orientation and CC point location during processing can be described more comprehensively, thereby achieving effective five-axis space cutter compensations. It can be observed from the experiment that the method can solve the space cutter compensation problem in five-axis processing efficiently, thereby qualifying as a genuine five-axis NURBS interpolation method. In so doing, the capability of five-axis machines processing complex surface can be upgraded dramatically. Meanwhile, this method can also be applied to the space cutter compensation of other machines with multiple-axis structures, as the space cuter compensation function is realized in the workpiece coordinate system.
Footnotes
Academic Editor: ZW Zhong
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This research was sponsored by the National Natural Science Foundation of China (nos 51475324 and 51105269), the National Key Technology R&D Program (no. 2013BAF06 B00), and Tianjin Science and Technology Plan Projects (nos 13JCZDJC34000 and 14JCZDJC39600).