
Abstract
Aiming at the problem that traditional model predictive control (MPC) is difficult to adapt to articulated steering tractors in complex working conditions such as orchards, this paper proposes a improved MPC control strategy that utilizes PSO optimization weights. Firstly, a four-degree-of-freedom model is established, and the complexity is simplified by a linear time-varying method to solve the problems of large computational load and poor real-time performance of traditional models. Secondly, in view of the deficiency of traditional MPC weights relying on empirical parameter adjustment, the PSO optimization weight matrix is introduced to improve the tracking accuracy. Finally, this paper’s improved MPC method is verified through simulation and real vehicle experiments. The simulation experiment results show that, compared with the MPC, the improved MPC algorithm reduces the path deviation by 40% and shortens the convergence time by 37.5%. Compared with the PID controller, the deviation is reduced by 40% and the response speed is increased by 30%. The real vehicle test shows that the lateral error ranges of the MPC control, the improved MPC control and the PID control were (−0.1, 0.25) m, (−0.08, 0.1) m, and (−0.2, 0.4) m, respectively. The heading angle deviation ranges of MPC control, improved MPC control and PID control are (−2°, 2°), (−2°, 1°), and (−3°, 3°), respectively. The simulation and experimental results show that the proposed PSO-optimized MPC strategy significantly improves the tracking accuracy and stability, providing a novel and effective solution for the tracking control of articulated tractors in orchard environments.
Introduction
In recent years, the rapid development of modern agriculture has made precise positioning and safe obstacle avoidance technologies for agricultural vehicles increasingly critical in agricultural production. 1 With advancements in satellite navigation, wireless communication, and sensor technologies, autonomous navigation for agricultural machinery has advanced significantly, becoming a key means to improve productivity and achieve agricultural automation.
Among agricultural vehicles, articulated steering tractors stand out with unique structures: their front and rear bodies connect via a hinge enabling relative angular deviation, allowing steering without traditional wheel deflection. 2 This makes them compact. The hinge eliminates the need for a long wheelbase, suiting navigation through dense vegetation and narrow paths. 3 Their steering is flexible: front and rear bodies pivot relative to each other, yielding a smaller turning radius than rigid-frame tractors, an advantage in confined spaces like orchard rows. 4 This high maneuverability ensures efficient, stable operation in orchards (where precise positioning matters) and small farmland, reducing crop damage during turns. 5 These strengths, compactness, flexibility, and maneuverability, have drawn wide attention in agricultural automation, with studies noting their potential to boost efficiency and cut labor costs in complex environments. 6 However, their trajectory tracking challenges are far more complex than those of other agricultural vehicles, highlighting their uniqueness as a research object. Compared with rigid-frame tractors, their segmented structure causes strong front–rear coupling and more complex dynamic interactions; frequent steering adjustments in narrow orchard rows exacerbate control difficulty. Rigid-frame tractors have a unified structure, with deviations mainly from tire slip, making their control strategies inapplicable. Compared with crawler agricultural vehicles, articulated tractors offer higher speed and flexibility but differ in ground contact mode: their wheeled design responds more sensitively to terrain unevenness, while crawlers rely on larger contact areas for stability, resulting in distinct tracking dynamics. Even compared with small agricultural drones, articulated tractors’ larger mass and inertia slow control responses, and their strong interaction with soil makes tracking more susceptible to adhesion variations. Lightweight drones, unlike them, operate in 3D space with minimal ground resistance.
Common control methods for trajectory tracking include the pure pursuit algorithm, linear quadratic optimal control, model predictive control (MPC), sliding mode control, and PID control. 7
PID control, widely used for its simplicity, has seen improvements by integrating other technologies. For instance, a novel fuzzy PID recurrent neural network (FPIDRNN) controller enhances quadrotor UAV trajectory control by fusing fuzzy logic, PID, and neural networks, adapting to nonlinear dynamics without precise models, with simulations showing superior accuracy and robustness. 8 Yan and Li 9 proposes an adaptive PID method for agricultural vehicles based on single-neuron theory, achieving high precision. However, these methods are designed for small vehicles or simple scenarios, failing to address articulated tractors’ front–rear coupling and frequent steering demands, leading to insufficient precision in orchards.
MPC, valued for handling multi-objective optimization and explicit constraints, has critical limitations in traditional forms: empirical weight tuning relies heavily on experience, failing to optimize for articulated tractors’ variable working conditions (e.g. varying soil adhesion); high computational load from complex models (e.g. high-degree-of-freedom tire models) impairs real-time performance, critical for dynamic agricultural environments. Relevant studies include Liu et al. 10 which proposes an adaptive MPC tracker with small errors at different speeds but ignores articulated structures; Zhu et al., 11 which uses collocation-based MPC for accuracy but with complexity limiting low-speed application; and Wang et al., 12 which designs an MPC tracker for low adhesion but neglects front–rear coupling. Wu et al. 13 develops an MPC controller robust to speed and adhesion but only for four-wheel independent drive vehicles, unsuitable for articulated tractors. Chowdhri et al. 14 adopts a high-degree-of-freedom tire model for precision but at the cost of computational load, conflicting with orchard real-time requirements.
Sliding mode control has advanced too: Wendemagen et al. 15 proposes a backstepping fuzzy sliding mode method with PSO tuning and Kalman filtering, improving three-wheeled robot performance; Metekia et al. 16 develops a fractional-order sliding mode controller with PSO-tuned gains for UAVs. Yet these methods, designed for small robots or UAVs, neglect articulated tractors’ large inertia and coupling, lacking robustness in orchards.
Critical gaps persist for articulated tractors. Structural mismatch is evident, as seen in Wu et al., 13 which is limited to specific vehicle types and cannot accommodate the unique segmented structure of articulated tractors. Computational efficiency and real-time performance are in conflict. Chowdhri et al. 14 adopts a complex model to improve control accuracy but increases computational load, hindering its application in dynamic agricultural environments where timely responses are crucial. Parameter fitting issues arise with Wang, 17 which uses a magic formula requiring excessive parameters; this leads to inaccuracies in calculated lateral stiffness, undermining precise control in varying soil conditions. Stability concerns plague Rokonuzzaman et al., 18 whose multi-layer neural network model lacks proven stability, posing risks to reliable operation in agricultural settings. Additionally, adaptation is oversimplified: methods like those in Wang et al. 12 and Moumouh et al. 19 are verified only in simple systems or ignore key parameters such as control time domains and weight coefficients, failing to adapt to the complex dynamics of articulated tractors.
In summary, despite significant progress in existing research on vehicle trajectory tracking, its application to the specific scenario of articulated tractor operations in orchards remains limited. Specifically: Traditional MPC methods rely on precise models and empirical parameter tuning, exhibiting unstable performance and low computational efficiency in complex environments. While some studies employ complex dynamic models or ensemble learning algorithms to enhance performance, their substantial computational demands make control implementation challenging on agricultural machinery hardware platforms.
To overcome these challenges, this paper proposes a novel MPC strategy based on particle swarm optimization (PSO). Its fundamental improvement lies in introducing the PSO algorithm to conduct systematic optimization of the MPC controller’s critical weighting parameters. This approach breaks free from the limitations of manually tuning parameters based on experience. By leveraging the algorithm’s global optimization capability, the weighting parameter design achieves high adaptability to the specific kinematic characteristics of articulated tractors and the demanding conditions of orchard environments, ultimately achieving controller performance optimization. This article proposes:
Kinematic modeling and linearization: Build a articulated tractor model and linearize it to solve the accuracy problem of traditional rigid models, reduce computational complexity, and support high-precision trajectory tracking.
Design of PSO–MPC controller: Utilizing the particle swarm optimization algorithm to optimize the position/heading angle error weights of the MPC, replacing manual parameter tuning to achieve global optimization of tracking performance and enhance robustness.
Designing a multi-dimensional validation plan: The plan aims to validate the practical value of the technology through integrated simulation and real-vehicle testing. The integrated simulation leverages Simulink-CarSim to design comparative experiments, quantitatively analyzing advantages in metrics such as path tracking error. Real-vehicle testing focuses on lateral tracking error and heading deviation to assess actual adaptability, providing data support for technology implementation.
The rest of the paper is organized as follows: Section 2 details the four-degree-of-freedom kinematic model of articulated tractors and its linearization process, elucidates the principles of traditional MPC design, and introduces a PSO-based MPC weight matrix optimization strategy; Section 3 presents research findings and discussions, validating the PSO–MPC strategy through comparative simulations with traditional MPC and PID controllers, and analyzing real-vehicle test results in orchard environments; Section 4 provides a comprehensive discussion, highlighting the novelty and significance of the proposed method by comparing it with recent related research; finally, Section 5 summarizes key findings and contributions while suggesting future research directions.
Materials and methods
Modeling the kinematics of a articulated steering tractor
Articulated tractors consist of two main sections: the front and the rear, which are rigidly attached to each other. The kinematic modeling diagram of an articulated tractor is shown in Figure 1. Considering the limitations of the front and rear axles, the articulated joint facilitates face-to-face contact. In modeling the designed walking platform, it has four degrees of freedom. Three of the degrees of freedom are related to the position and direction of the platform motion, while the remaining one is related to the angle between the two platforms, but other degrees of freedom may exist in real motion scenarios, such as the tilting of the tractor. However, the main focus of the derived model is to satisfy the requirements of the control algorithm, that is, yaw stability through active steering design. Therefore, other potential motion variables are beyond the scope of this paper.

Kinematic modeling diagram of an articulated tractor.
where,
To derive the kinematic equations for the traveling platform, several assumptions must be made: the steering angle of the platform remains constant during small displacements, the dynamic effects associated with low speeds are disregarded, and slip effects are absent as the traveling platform moves across the plane. The above assumptions are based on the fact that tractors in orchard operations usually operate at low speeds. In this speed range, the tire sideslip rate is lower than 15% and dynamic effects (e.g. pitch/lip) have a negligible impact on trajectory tracking. 20 However, at high speeds or extreme ground adhesion conditions (e.g. muddy roads), the slip effect needs to be corrected by a dynamics model to ensure control accuracy.
The kinematic constraints of a articulated steering tractor can be articulated as follows:

where,
The correlation between the rate of the folded steering angle and the rates of the azimuths of the front and rear bodies can be expressed by the following equation:

where,
Since the front and rear bodies of the articulated steering tractor are connected by articulation points, the front and rear axle speeds need to satisfy geometric constraints. Assuming that the rate of change of the articulation angle is

The rate of change of the posterior body azimuth is determined by calculating the angular displacement over time. It can be expressed as:

In the proposed method, the variable under consideration is the rate of the folding angle, which is denoted as

Building upon this foundation, a kinematic model was developed for an articulated steering tractor, utilizing the center of the rear axle as the reference control point.
Algorithm modeling of MPC and its improvement
MPC path tracking algorithm based on the motion model of a articulated steering tractor
From equation (5), it can be seen that the input quantity at the folded waist steering is

In accordance with the intended trajectory, each reference point aligns with the aforementioned equation. By designating the reference quantity as r, equation (6) can be reformulated as follows:

where,
In comparison to predictions made using nonlinear models, the linear time-varying model offers advantages such as reduced computational complexity and improved control accuracy. Consequently, this paper begins by converting the traditional tractor kinematics model into a linear time-varying framework. The modeling process is accomplished through the formulation of state space equations, which enable the derivation of desired state values based on specified control inputs. Leveraging this model allows for the short-term prediction of the tractor’s state, with the discretized linear model serving as the foundation for these future forecasts. The discrete linearized model is presented as follows:

where, T is the control period.
The discrete state space equation of the system can be expressed as follows:

Transform the above model to construct a new state vector:

In order to incorporate the system input increments

The output equation is:

where,
The output of the system in the predicted future time domain

where,
To ensure that the tractor can follow the target trajectory swiftly and with stability, the change in the folding turn angle is utilized as the control variable in the objective function. Consequently, the optimization objective function for the path tracking model can be formulated as follows:

where,
Optimization of MPC weight coefficients based on particle swarm algorithm
The selection of matrix parameters typically depends on empirical experience and experimental approaches. In these experimental methodologies, one parameter is initially set, and subsequent parameters are adjusted based on the outcomes observed, a process that often proves inefficient and does not ensure optimal performance, but only facilitates a form of approximate optimization. To address this optimization challenge, this paper introduces the particle swarm optimization algorithm, which exhibits superior search capabilities. Specifically, the particle swarm algorithm will be employed to optimally determine the weight coefficients within the model predictive control algorithm.
The determination of the optimal control quantity for each iteration process is governed by the weight matrices
In this paper, there are two control quantities, fold angle and speed, within the Model Predictive Control (MPC) framework. Consequently, the control weight matrix

In equation (15), the parameters “a” and “b” represent the two parameters subject to optimization. To optimize these parameters within the state weight matrix

Flowchart of particle swarm algorithm for optimizing MPC weight parameters.
The particle swarm optimization module uses the MPC objective function (14) as the fitness function, and iteratively updates the particle positions (i.e. the weight parameters a and b) in order to minimize the path tracking error. Specifically, the velocity update for each particle follows:

where,
Parameter selection for PSO.

Results and discussion
Simulation analysis and verification
Tracking comparison experiment before and after MPC improvement
When articulated steering tractors are traveling in orchards, the road conditions are poor, the road surface is slippery and uneven, and the adhesion coefficient is relatively low, only between 0.2 and 0.6. To accurately reflect the real scene in the simulation, the typical soil surface adhesion coefficient is set to 0.4, and the planting and application tasks are carried out at a speed of 3.6 km/h. In terms of simulation configuration, the tractor template is imported into CarSim to customize the articulated tractor model, and the road surface parameters are adjusted to the above-mentioned soil conditions. The Simulink controller operates synchronously through the CarSim S-Function interface, and the data synchronization frequency is consistent with the sampling time (50 Hz). The MPC parameters are configured as N p = 20 and N c = 5 to ensure that the overall Settings meet the requirements of real-time performance and simulation accuracy. To assess the efficacy of the proposed Model Predictive Control (MPC) path tracking controller, a multi-body dynamics modeling diagram of an articulated steering tractoras illustrated in Figure 3.
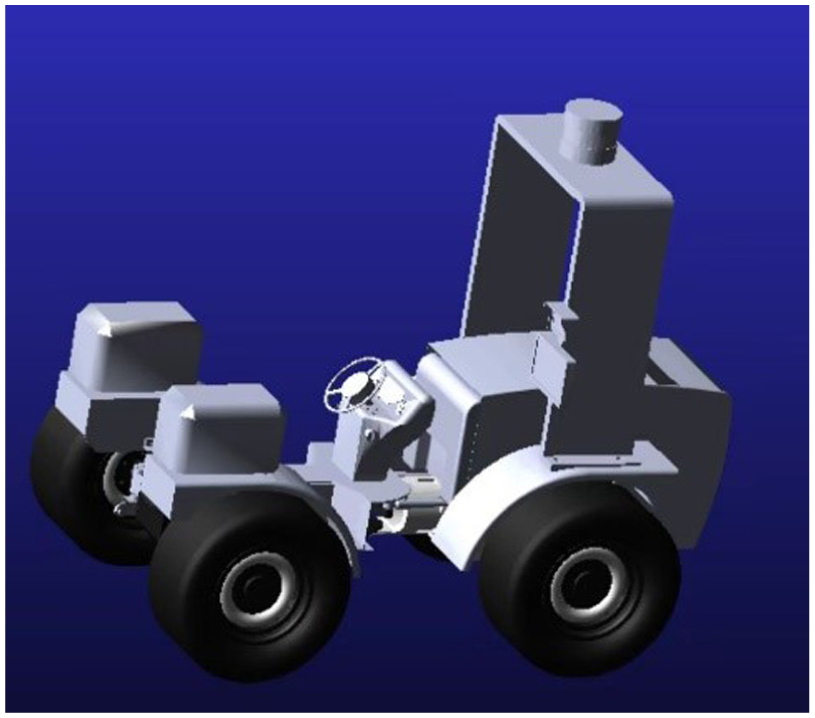
Multi-body dynamics modeling diagram of an articulated steering tractor.
The physical parameters of the articulated tractor are shown in Table 2.
Physical parameters of articulated tractor.

To validate the efficacy of the model predictive control (MPC) algorithm for trajectory tracking in a articulated steering tractor, a joint simulation utilizing MATLAB/Simulink and CarSim was conducted. The simulation involved creating a model of the articulated tractor along with configurations for the road model and path trajectory within CarSim. The reference trajectory comes from the actual running data collected in the apple orchard. Since the trajectory data collected in the real world may contain errors, it needs to be preprocessed and the preprocessed data saved before it can be read in the simulation program.
Under consistent hardware and software conditions, we input both the experientially chosen weight parameters and the weight parameters optimized through particle swarm optimization, while keeping all other parameters constant. The comparison of tracking effect before and after MPC optimization are presented in Figure 4.
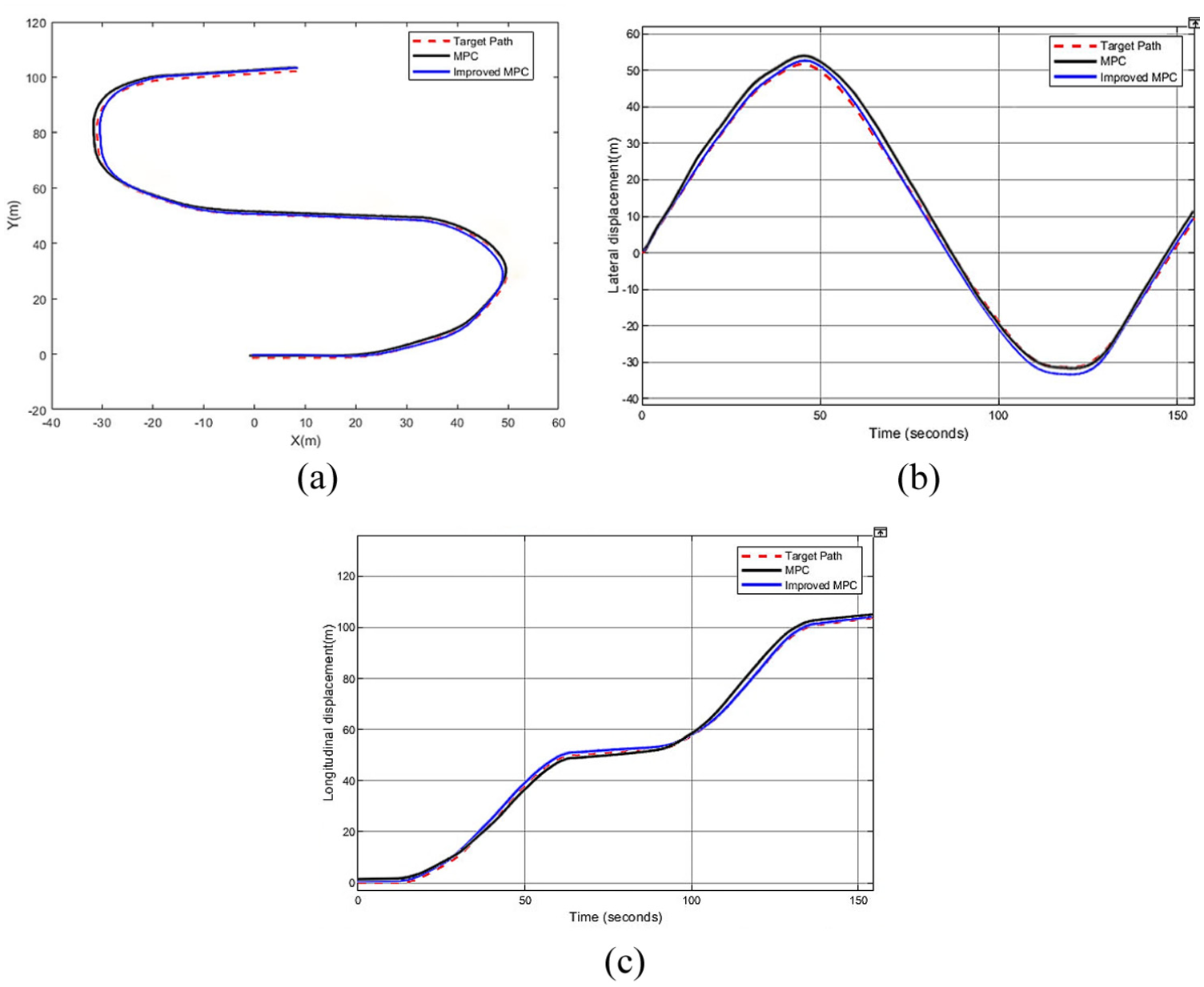
Comparison of tracking effect before and after MPC optimization. (a) Path tracing comparison. (b) Comparison of lateral displacement. (c) Longitudinal displacement comparison.
The MPC tracking algorithm, enhanced through parameter optimization via particle swarm optimization (PSO), illustrated in Figure 4(a), demonstrates a more rapid convergence of the tractor back to the reference path. The path tracking error plots presented in Figure 4(b) and (c) indicate that the implementation of the particle swarm optimization technique significantly reduces both the overall horizontal and vertical path tracking errors of the model predictive control (MPC) system. In summary, the improved MPC algorithm outperforms MPC control in both path tracking accuracy and response speed, achieving a 40% reduction in maximum deviation and a 37.5% shortening of convergence time. This observation suggests that the MPC exhibits an improved responsiveness to deviations from the designated tracking path.
Tracking comparison experiment of improved MPC with PID
The driving mechanics of a articulated tractor differ significantly from those of a conventional vehicle, necessitating operation along a predetermined path tailored to various tasks. In orchard settings, agricultural machinery typically engages in activities such as land preparation, spraying, and fertilizer application. In this study, a model in CarSim is integrated with a model predictive control (MPC) controller, designed using Simulink, to facilitate path tracking experiments. The performance of this MPC controller is then compared to that of a proportional-integral-derivative (PID) controller.
Based on the experience, 0.8 is selected to avoid the body shaking caused by too strong response; the integration coefficient K
i
is used to eliminate the steady state deviation, considering the requirement of the orchard path tracking on the accuracy, 0.05 is selected to prevent the integration saturation; the differential coefficient K
d
is used to inhibit the overshooting, combined with the inertia characteristics of the steering mechanism, it is set to 0.1 to balance the stability of the system and the response speed. The relevant parameters of the MPC controller:
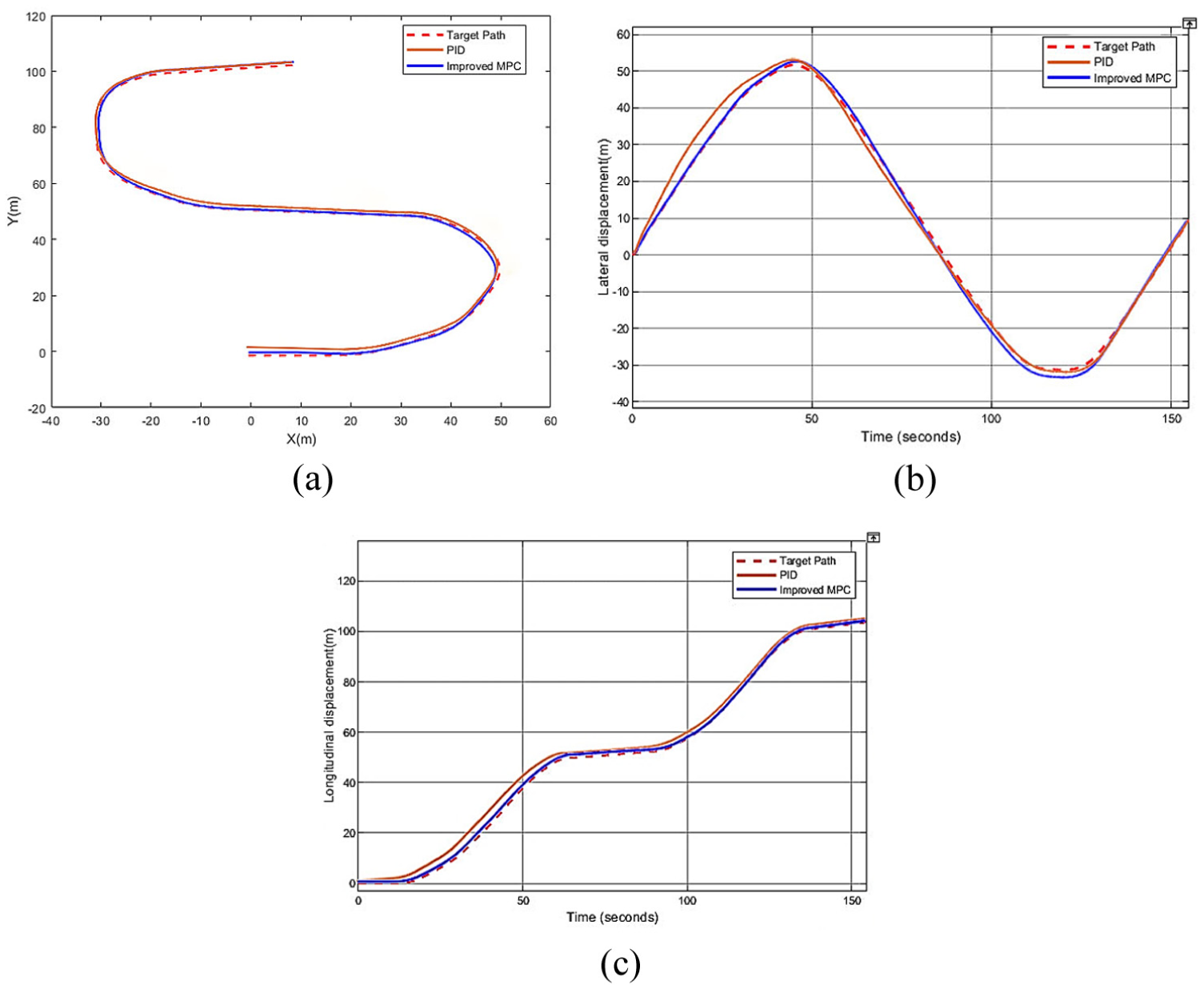
Before and after comparison of improved MPC with PID path tracking. (a) Path tracing comparison. (b) Comparison of lateral displacement. (c) Longitudinal displacement comparison.
In the before and after comparison of the improved MPC with PID path tracking Figure 5. From Figure 5(a), the improved MPC path tracking performance is better than PID, and the improved MPC algorithm makes the tractor closer to the desired trajectory. From Figure 5(b) and (c) it is seen that the improved MPC is more effective in reducing the deviation of transverse longitudinal displacement, and the accurate trajectory tracking task can be effectively accomplished under the action of the improved MPC controller.
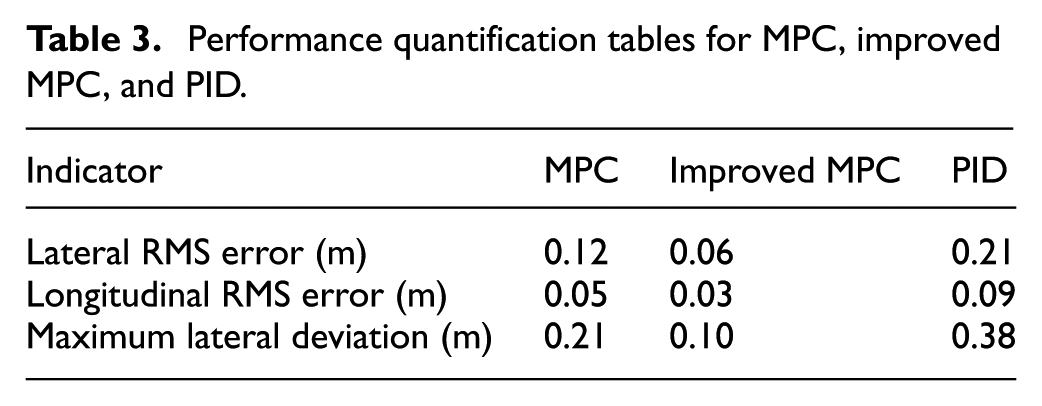
To summarize, from the three aspects of path tracking and lateral and longitudinal displacement of trajectory tracking, both the MPC control algorithm and the PID algorithm are able to achieve better tracking effect, but the MPC algorithm has a higher tracking accuracy and is able to travel along the target path more accurately. In summary, the improved MPC algorithm significantly outperforms the PID control with a 40% reduction in maximum deviation and a 30% shortening of convergence time. The improved MPC algorithm has better tracking effect. In order to visualize the performance differences of different control methods in trajectory tracking of articulated steering tractors, the following table compares the traditional MPC, Improved MPC and PID control algorithms through three key quantitative indexes, namely, root-mean-square error, maximum deviation, and convergence time, so as to clearly present the advantages of the proposed improvement methods in improving tracking accuracy and dynamic response speed. The performance quantification tables for MPC, Improved MPC and PID are shown in Table 3.
Performance quantification tables for MPC, improved MPC, and PID.
Real-vehicle testing and analysis
This system is a control system applied to unmanned vehicles, constructed based on liDAR positioning technology and using the PSO-improved MPC (PSO–MPC) algorithm to achieve path tracking control.
The system is mainly composed of a computer unit (industrial control computer), environmental perception devices such as lidar, integrated navigation module, positioning antenna, control module, by-wire actuator (responsible for steering and speed control), display and communication module, etc. Among them, the PSO–MPC algorithm is written in C++ and deployed in the industrial control computer. The industrial control computer and the by-wire chassis realize the control of vehicle steering and speed through the CAN bus.
In terms of functional architecture, the system is divided into environmental perception module, path planning and decision-making module (including PSO–MPC algorithm), by-wire actuators and related monitoring equipment according to perception, decision-making and control, forming a complete structure from the perception layer to the execution layer. The modules are interconnected through CAN to ensure the efficient and collaborative operation of the system. The real vehicle test platform is shown in Figure 6.

Real vehicle test platform.
In the actual orchard operation scenario, the system stably controls the vehicle speed at 3.6 km/h. The improved MPC, MPC, and PID controllers were adopted to track the reference path. The lateral error and course angle error graphs are shown in the Figure 7.

Lateral error and course angle error. (a) Lateral tracking error comparison. (b) Course angle deviation comparison.
The comparison results of the lateral tracking error and the heading angle deviation are shown in Figure 7(a) and (b). All three control methods, namely MPC, improved MPC and PID, can gradually converge the lateral position tracking deviation and heading angle deviation to zero, but there are significant differences in convergence speed and deviation suppression effect: After the MPC control scheme is stable, the fluctuation range of the lateral position tracking error is (−0.1, 0.25) m, and the fluctuation range of the heading angle deviation is (−2°, 2°). After the stability of the improved MPC control scheme, the fluctuation range of the lateral position tracking error was reduced to (−0.08, 0.1) m, and the fluctuation range of the heading angle deviation was optimized to (−2°, 1°). After the PID control scheme is stabilized, the fluctuation range of the lateral position tracking error is (−0.2, 0.4) m, and the fluctuation range of the heading angle deviation is (−3°, 3°). As demonstrated in the preceding analysis, the improved MPC controller not only achieves faster convergence of lateral error and heading angle error but also strictly confines these errors within specified limits under severe conditions such as low adhesion coefficients. This input–output constraint characteristic has been thoroughly validated through simulations and real-vehicle testing, fully confirming the proposed method’s reliable stability and robustness. In contrast, traditional MPC and PID controllers exhibit larger error ranges and stronger oscillation tendencies under identical operating conditions, indicating their relative instability.
Discussion
The core differences between the proposed improved PSO-optimized MPC strategy and the latest existing research lie in three aspects: First, the optimization targets differ. Huang et al. 21 and Ding et al. 22 focus on LQR weights and MPC time-domain parameters, respectively, whereas this paper adjusts the position error and heading error parameters within the MPC weighting matrix, better aligning with the attitude control requirements of articulated tractors. Second, scenario adaptability differs. The validation scenarios of Li et al. 23 and Wang et al. 24 concentrate on urban roads or general slippery surfaces. This paper, however, demonstrates the method’s effectiveness in specialized agricultural scenarios through simulations and real-vehicle testing under low-friction, low-speed conditions in orchards. Third, the underlying models differ. Existing studies predominantly rely on rigid chassis dynamics models, whereas this paper employs a four-degree-of-freedom linearized model to capture the folding and steering characteristics of articulated structures, thereby reducing errors caused by model simplification.
This study focuses on the trajectory tracking problem of articulated tractors in orchard operations. In such scenarios, the operation speed is low (such as 3.6 km/h in the test) to ensure safety, accuracy and operational comfort. Empirical evidence (such as Hu et al. 20 ) shows that when the vehicle speed is below ~5 km/h, the tire skidding rate is relatively low (<15%), and the influence of dynamic effects on trajectory tracking can be ignored compared to the kinematic constraints of articulated structures. Under the orchard-like conditions of low speed and low adhesion (μ = 0.4), both the simulation and experiments in this paper verified the effectiveness of the PSO–MPC controller based on this simplified model. However, although the current models and PSO–MPC controllers have been highly effective and proven in the expected low-speed orchard applications, they were not designed for high-speed conditions. Solving this limitation is a key direction for future research. Future research can focus on three aspects: First, developing or integrating a more comprehensive dynamic model that captures the effects of inertia, tire forces (potentially using semi-empirical models like Pacejka’s magic formula), and suspension dynamics, especially the coupling dynamics between the front and rear units under dynamic loading. Secondly, investigating adaptive or robust MPC formulations that can explicitly account for model uncertainty and varying adhesion conditions inherent at higher speeds. This could involve online parameter estimation or gain-scheduling techniques based on speed and estimated terrain conditions. Finally, ensuring that the increased complexity of the dynamic model does not compromise the real-time performance critical for vehicle control, potentially through efficient model formulations or optimization algorithms.
Conclusions
This paper proposed a PSO-optimized MPC strategy to address the trajectory tracking challenges of articulated tractors in orchard environments. The contents are summarized as follows:
A four-degree-of-freedom kinematic model of articulated steering tractors was established. The linearization of the model was achieved by using the linear time-varying method. This model overcomes the limitation of traditional rigid vehicle models that ignore the motion characteristics of articulated structures. The dynamic relationship between the folding steering angle and the vehicle’s attitude was accurately captured. It provides a suitable underlying model foundation for MPC controllers.
Aiming at the shortcomings of the traditional MPC weight matrix, which relies on manual adjustment based on experience and is difficult to adapt to the low ground clearance and low-speed operation conditions in orchards, the particle swarm optimization (PSO) algorithm is introduced. This method takes minimizing the trajectory tracking error as the objective function and uses the particle swarm optimization algorithm to optimize the position error weights and heading error weights within the MPC weight matrix Q, thereby achieving the global optimization of the weight parameters. This enhances the controller’s robustness against system disturbances and uncertainties, ensuring that the articulated steering tractor maintains stable operation along the predefined working path.
Through simulation experiments and real vehicle verification in orchards, it is indicated that the algorithm proposed in this study has made certain progress in practical performance. In the Simulink-CarSim joint simulation, based on the four-degree-of-freedom model and the adjustment of PSO weights, compared with the traditional MPC, the improved algorithm reduces the maximum path deviation by 40% and compresses the convergence time by 37.5%. Compared with the PID control commonly used in agricultural equipment, this algorithm further reduces the path deviation by 40% and increases the response speed by 30%, breaking through the inherent limitation of PID that it is difficult to balance “steady-state accuracy and dynamic response.” Real vehicle test verification: Under stable conditions, the lateral error ranges of MPC control, improved MPC control and PID control are (−0.1, 0.25) m, (−0.08, 0.1) m, and (−0.2, 0.4) m, respectively. The heading angle deviation ranges of MPC control, improved MPC control, and PID control are (−2°, 2°), (−2°, 1°), and (−3°, 3°), respectively. The deviation ranges of the heading angle are (−2°, 2°), (−2°, 1°), and (−3°, 3°), respectively. In conclusion, in both tests, the improved MPC can achieve rapid deviation correction and high-precision tracking, and has better accuracy and stability.
Footnotes
Acknowledgements
We thank all the authors for their contributions to the writing of this article.
Handling Editor: Chenhui Liang
Author note
The statements, opinions, and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions, or products referred to in the content.
Author contributions
Methodology and writing—original draft preparation: N.X. Formal analysis and investigation: X.N. Data curation: L.W. and A.L. Resources: F.L. and Z.L. Validation: Y.S. and N.G. All authors have read and agreed to the published version of the manuscript.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by Shandong Province Key Research and Development Plan (Major Science and Technology Innovation Project; grant no. 2022CXGC020706). Shandong Province Agricultural Mechanization R&D, Manufacturing, Promotion and Application Integration Pilot Project (grant no. NJYTHSD-202315). MIIT Major agricultural machinery equipment power system key components project (grant no. 2023ZY02002). Shandong Province Science and Technology oriented Small and Medium Enterprises Enhancement Project (grant no. 2023TSGC0288). Jinan 2023 talent development special fund research leader studio project (grant no. 202333067).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data presented in this study are available on request from the corresponding author.