
Abstract
Low energy efficiency is an important factor restricting the application and development of biped robots. In this article, an energy-saving walking control method using descriptive parameter optimization to obtain the gait type with minimum energy consumption is proposed. The algorithm evaluates the energy consumed during walking considering the load torque and angular velocity of all joint actuators of the five-mass simplified model of the robot. A gait database with the step length, gait type and stability margin as the input and gait parameters and energy consumption as the output is constructed, and the gait adapted to the zero-moment point region is dynamically adjusted during walking to realize a compromise between the robot walking stability and energy consumption. In the gait parameter optimization part of the algorithm, a mapping relationship between the descriptive parameters and body trajectory is established. Through parameter sampling and inverse kinematics calculations, seeds are selected from the sample set according to the stability margin, and the gradient descent method of directional acceleration is used to approximate the minimum energy consumption under the descriptive parameters in the neighborhood of the seeds. In the gait synthesis part of the algorithm, according to the given walking task and the energy consumption-related items in the gait database, the walking trajectory with minimum energy consumption is planned. In real-time walking, the database is queried according to the planned step sequence, the gait parameters are obtained, the robot joint movement is controlled, the feedback zero-moment point is calculated from the robot foot pressure, and the database input query is adjusted according to the trajectory deviation to simultaneously achieve walking stability and reduce energy consumption. To determine the effectiveness of the algorithm, dynamic simulation experiments and real robot walking experiments are carried out. The experimental results show that our algorithm has a significant energy-saving effect. The experimental videos are available at https://github.com/xkluzq/biped-robot.
Keywords
Introduction
Currently, biped robots are being intensely researched because they are expected to be able to simulate humanoid walking, 1 jumping, 2 and even running 3 to replace humans in tasks such as accident rescue 4 and medical services. 5 After nearly 50 years of unremitting effort, researchers have made remarkable progress in the field of biped robots. 6 For example, the robot ASIMO designed by Kanazawa et al. 7 can climb vertical stairs, and the robot Atlas controlled by Koolen et al. 8 can traverse obstacles.
Biped walking is the most important and fundamental problem in research on biped robot motion. The proposed methods can be divided into three main approaches. One is the gait generation approach based on the external characteristics of human walking, which utilizes high-speed optical motion capture systems to obtain the motion trajectory of human body markers and applies the obtained data to robot walking. 9 Another approach is based on the underlying characteristics of human movement, which uses a central pattern generator to generate rhythm signals similar to the control of human walking and adjusts the mass center of the robot body and the online foot trajectory. 10 The third approach is based on the dynamic characteristics of a biped robot, in which the robot is simplified into a linear inverted pendulum model consisting of a point mass and a massless telescopic leg 11 or a cart-table model consisting of a massless table and a cart driving on the table with all the mass concentrated within it. 12
There is still a large deficiency in the structural flexibility of biped robots compared with that of humans, which indicates that gait generation methods based directly on the external or internal characteristics of human walking have limitations. Most researchers prefer to simplify the biped robot model. However, in the model simplification process, some secondary information is ignored, and the accuracy of the simplification determines the upper bound of the control effect. 13 Shimmyo et al. 14 and Faraji et al. 15 decomposed the mass of a biped robot into the body and legs to form a three-mass inverted pendulum model and used preview control and model predictive control, respectively, for gait pattern generation. Luo and Chen 16 further proposed a three-mass angular momentum model using model predictive control to obtain better motion control accuracy.
In the gait control of biped robots, some constraint conditions for the robot body are often introduced to reduce the complexity of the algorithm, which causes unnatural walking motions, consumes large amounts of energy, and reduces the possible walking time of biped robots with limited energy storage. 17 Thus, some researchers are currently working toward reducing constraints and improving the walking efficiency. Hong et al. 18 relaxed the vertical constraint of the body center of mass (CoM) and effectively alleviated the degree of bending of the knee joint during walking. Shin and Kim 19 expanded the range of planned trajectories, which improved the walking speed and reduced the walking energy consumption. Li et al. 20 studied a method for reducing energy consumption through trunk pitching motion during robot walking.
Fewer constraints to effectively reduce energy consumption will increase the parameter space in biped robot gait control. One promising way to find the optimal solution is to use artificial intelligence. Dau et al. 21 used polynomial interpolation to plan hip and foot trajectories and applied a genetic algorithm to optimize seven key parameters. Elhosseini et al. 22 designed a whale optimization algorithm with a random parameter “a” and a weight parameter “C” to find the optimal setting for the hip parameters. Wu and Li 23 introduced fuzzy control between robot acceleration, pressure sensors, and gait mode generators, resulting in better responses to external force disturbances. Tao et al. 24 proposed using the particle swarm optimizer of parallel comprehensive learning to select the key parameters affecting gait and realize rapid and stable walking of a robot. Wright and Jordanov 25 summarized the applicability, advantages and disadvantages of common intelligent algorithms in robot motion control.
In summary, in this paper, a novel gait energy consumption optimization algorithm that utilizes descriptive parameters to characterize the three-dimensional motion space of a robot body is proposed. To enhance the optimization precision, a five-mass model is employed, which is located within the body, legs, and feet. The algorithm establishes a mapping relationship between inputs such as the walking step length, type, and stability margin and outputs such as the walking gait and energy consumption. Using this mapping, a robot gait database is constructed for both planning and real-time control of robot walking. The remainder of this paper is organized as follows. In Section 2, we describe the simplified biped robot model and formulate the gait control problem. Section 3 focuses on the gait control algorithm from two aspects: optimal minimization of the energy consumption and real-time motion control. According to the algorithm in this paper and various control methods proposed in the related literature, Section 4 presents the simulation and experimental results for performance analysis of the proposed algorithm. In Section 5, the algorithm is summarized, and possible follow-up work is presented.
Problem formulation
System structure
The biped robot used to verify the algorithm in this paper is shown in Figure 1. Each leg of the robot has five degrees of freedom (DoFs), including hip rolling angle

Link structure of the experimental robot.
Basic parameters of the experimental robot.

There are many phases during biped robot walking, such as the single support phase (SSP), double support phase (DSP), and swinging foot landing collision phase. The mathematical model of a walking biped robot is a mixed system with continuous and discrete dynamics. 26 To simplify the analysis of biped robot walking, our research is based on the following assumptions:
(a) The motion process of the biped robot is continuous, there are no major mutations in the motion state, the force between the links of the robot is limited, and there are no large deformations of the links. Furthermore, the elastic effect of the robot is ignored, the joints between the links are regarded as rigid connections, and the internal clearance is ignored.
(b) The robot body maintains an upright posture. Most relevant studies show that the pitch angle of the human trunk is generally within 3°, 27 and with forward inclination of the body, the energy consumption in robot walking increases. 28
(c) The robot feet are always parallel to the ground. Most common biped robots do not have toes, so their feet cannot play the role of toes in improving the driving performance when lifting and landing. 29 In the contact and collision between the foot and the ground, maintaining the foot parallel to the ground helps reduce sliding and bouncing. 30
(d) The duty ratio of the DSP is
Allowable zero-moment point (ZMP) region
The ZMP is the most widely used stable walking criterion for biped robots. The ZMP is the point on the ground at which the horizontal component of the total moment generated by gravity and inertia forces is zero.3–6,8,10,12–25 Ignoring the influence of the angular acceleration of robot actuators, the calculation of the ZMP position
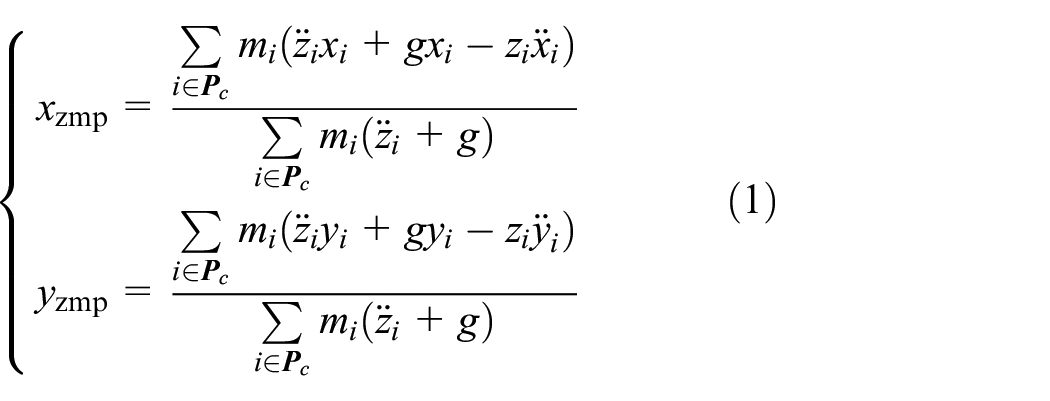
Here
Robot modeling errors and disturbances in walking will affect the stability of motion. Setting the ZMP trajectory at the centerline of the supporting foot during gait planning can achieve the most stable walking, 16 but this is not an energy-efficient method. The method of allowable ZMP region (AZR) draws out some edge regions in the region of the support foot to compensate for the disturbance, so that the planned ZMP trajectory is located in the subregion of the support foot to obtain a better trade-off between walking stability and energy consumption. 19
For a biped robot with foot length

AZR of biped robots.
Energy consumption index
The main component of energy consumption for biped robot motion is the energy consumption

Through gait trajectory optimization of robot motion,

Here
The sampling period

Problem definition
Based on the above analysis, the energy-saving walking control problem of the biped robot studied in this article is expressed as follows:
(a) Given the walking step length, gait type and AZR variable of the biped robot, the gait parameters needed to minimize E are determined.
(b) Given the target distance, the biped walking gait trajectory with minimum energy consumption is planned, and the AZR of the gait is controlled in real time to overcome interference and realize energy-saving walking of the biped robot.
Gait control algorithm
Overview
The biped robot walking control algorithm proposed in this paper takes the gait database as the core, in which the database is constructed through offline gait parameter optimization (GPO), and queries the database according to online gait synthesis (GSYN) to realize stable and energy-saving walking of the robot, as shown in Figure 3.
(a) The step length s defined in the gait database can be divided into three types: starting step
(b) According to the

Overall gait planning algorithm.
GPO algorithm
The GPO algorithm performs mapping calculation of the data items
Parametric description of the motion trajectory
When the biped robot walks with step length s, taking the left foot

If the minimum length

Limited space of hip movement.
In the robot walking process, if the body

where α = α
c
, and
Sample calculation
Without loss of generality, the algorithm in this article takes the left foot


where h f is the maximum height of the robot foot from the ground during walking.
Values of constants c x 1∼c x 5 in the planned foot trajectory of the biped robot.
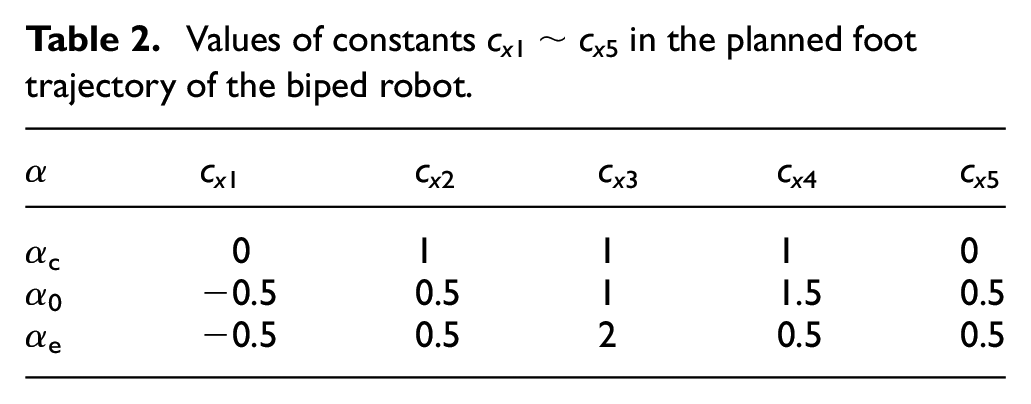
If

For

Geometric relations between
Inverse kinematics algorithm of the right leg.

Seed extraction
From algorithm 1 and equations (3) and (4),
(a) Physical constraint: corresponding to

(b) ZMP condition:
According to the
(a) The number of seeds is less than or equal to the sum of the numbers of values of all the parameters. That is,

where
(b) Seed
Parameter optimization
If E satisfies convexity in the neighborhood of
If

When
Parameter optimization algorithm.

Given
GSYN algorithm
Using the gait database, according to the biped robot walking distance d and stability η requirements, the GSYN algorithm realizes trajectory planning of moving targets and real-time gait control during walking.
Trajectory planning
The format of the data stored in the gait database is
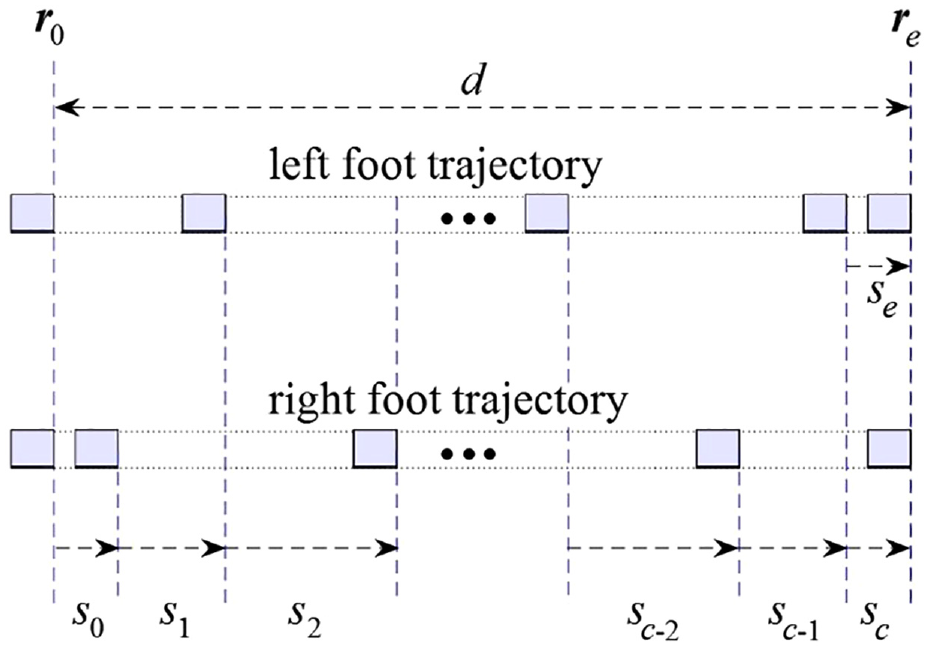
Step sequence of trajectory planning.
In Figure 6,

Knowing

where
Additionally,

Gait control
The gait controller of GSYN queries the gait database according to the input
where for the SSP,
Generally, during the DSP, the robot is in the overdrive state, and

where for
To avoid large fluctuations, the AZR controller adopts the incremental method to correct

The PD adjustment method of incomplete differentiation is adopted for each step increment

where,
Experimental evaluation
According to the biped robot structure described in section 2.1, 3D simulation models are constructed in the MATLAB and Webots environments to evaluate our proposed algorithm. The following is defined in the gait database: starting step set
Acquisition of data items
When
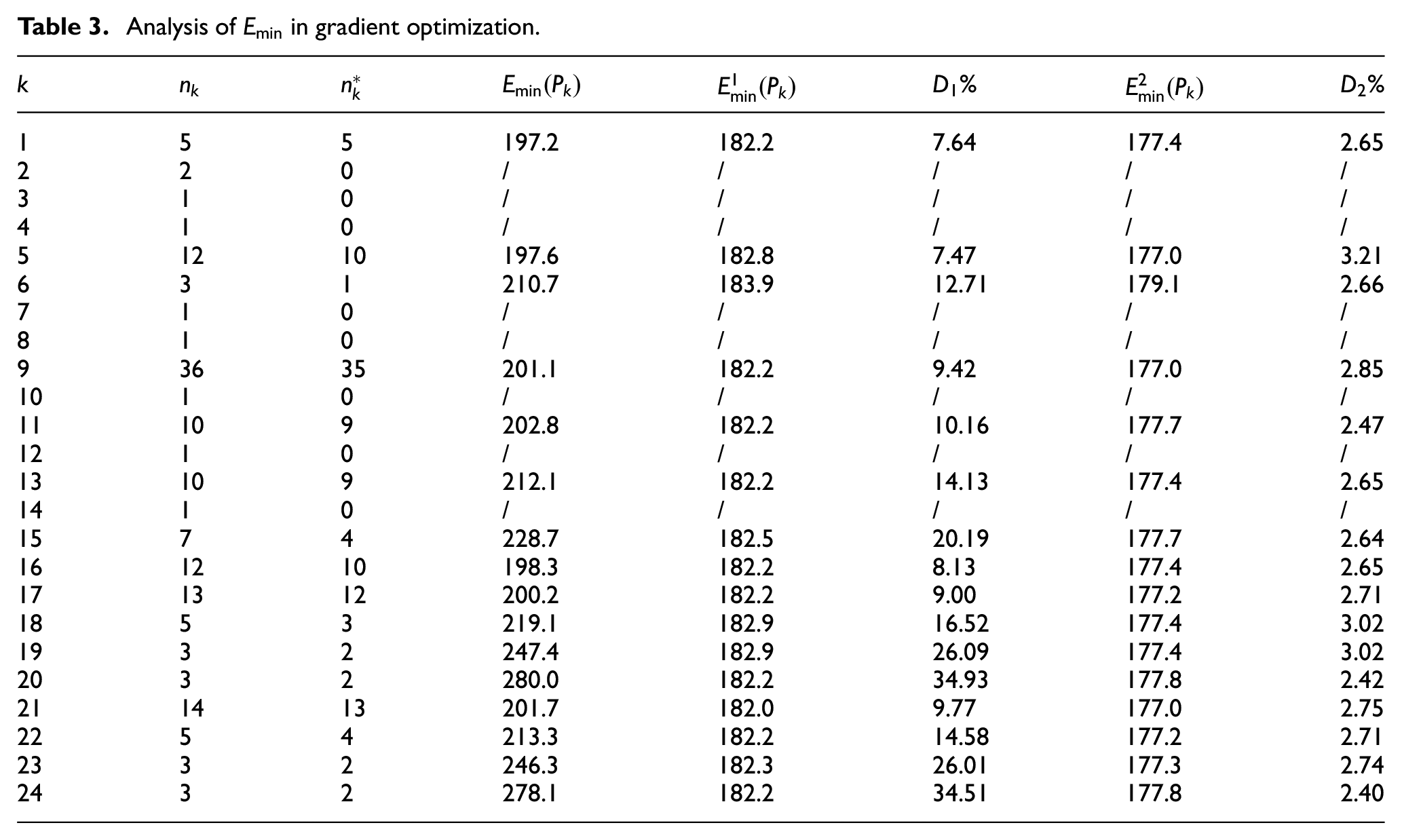
Analysis of
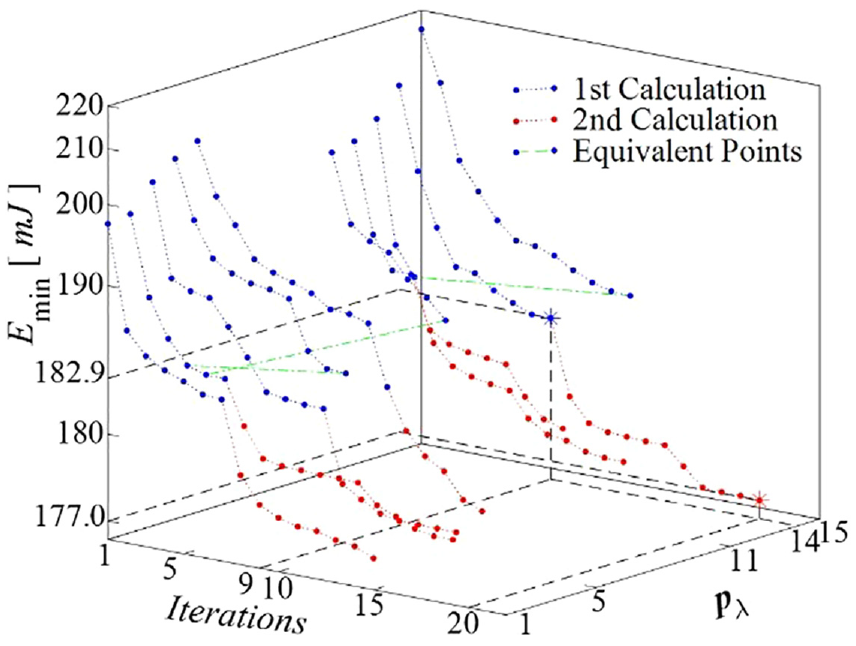
Convergence curve of
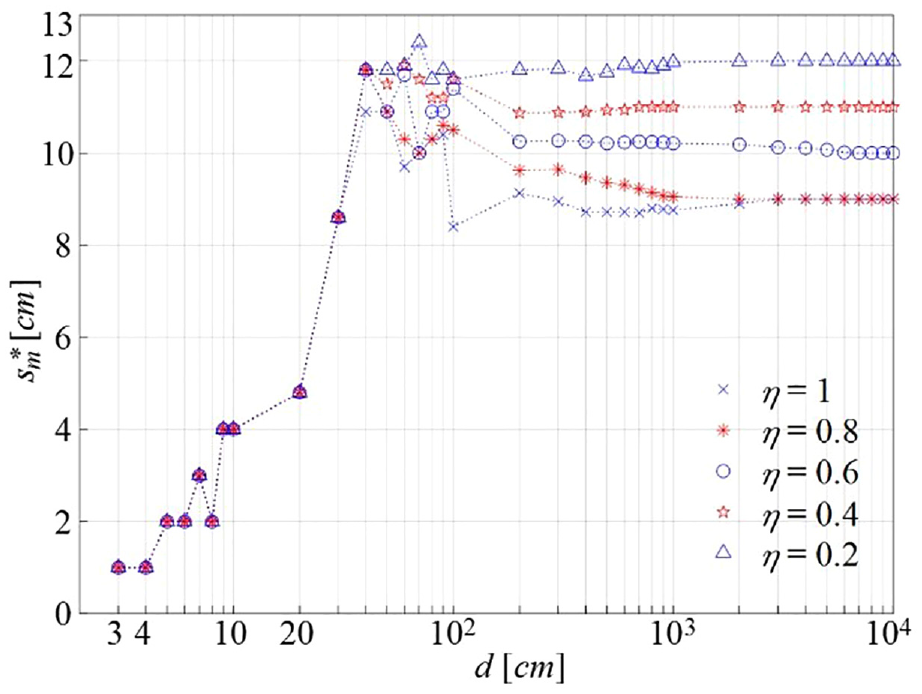
Effect of K
In the parameter description of biped robot body motion, K is an important factor affecting the optimization results. Taking the optimization calculation of data item

In related research, Luo and Chen
16
adopted the fixed hip height (FHH) algorithm,16 whereas Shin and Kim
19
allowed the hip height to fluctuate according to a cosine function (CHH).19 The FHH and CHH algorithms are compared with the optimization algorithm with

Comparison of
Gait planning
In the gait planning calculation, the associated database subset is

According to equation (12), the planning step sequence S with walking distance d and
According to the GSYN, if

Dynamic simulation of robot walking.
Robot walking experiment
The robot simulation model is designed in the virtual reality simulation software Webots according to the physical robot structure, and the dynamic performance of the above gait optimization results is evaluated. In the biped robot walking experiment,
Walking experiment of the biped robot in a virtual scene.
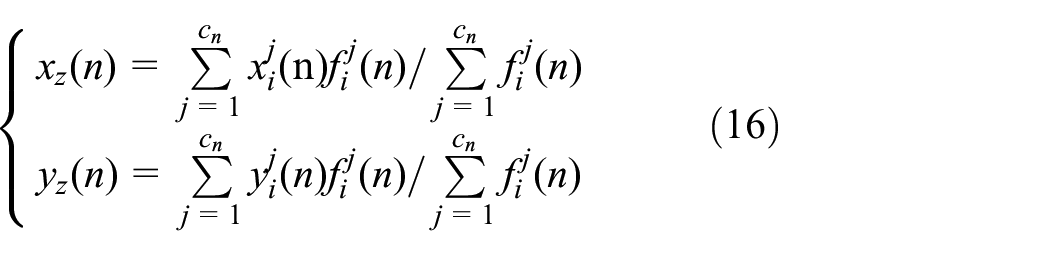
In the walking control process,

Plantar force during robot walking.
At the beginning of robot walking, to ensure stability, η is set low, and the planned ZMP trajectory is close to the center of the sole. As shown in Figure 14, the initial left foot support pressure is relatively balanced. Then, according to the detected ZMP correction, in step s1, η is corrected to 0.7, corresponding to sampling points 16–32 in Figure 15; the pressure begins to be dispersed, and the feedback ZMP is close to the edge of the sole of the foot. After step s2, η is stable at 0.8. Although among the feedback ZMP values, there is a smaller η corresponding to the AZR edge line, the small short-term deviation is not enough to change η. The planned ZMP trajectory and feedback ZMP trajectory of robot walking are shown in Figure 15.

Planned ZMP trajectory and feedback ZMP trajectory during robot walking.
Based on the virtual reality simulation, a performance test of physical robot walking is carried out. The calculation data for the robot walking process are shown in Table 4.
GSYN data of robot walking

In the table,

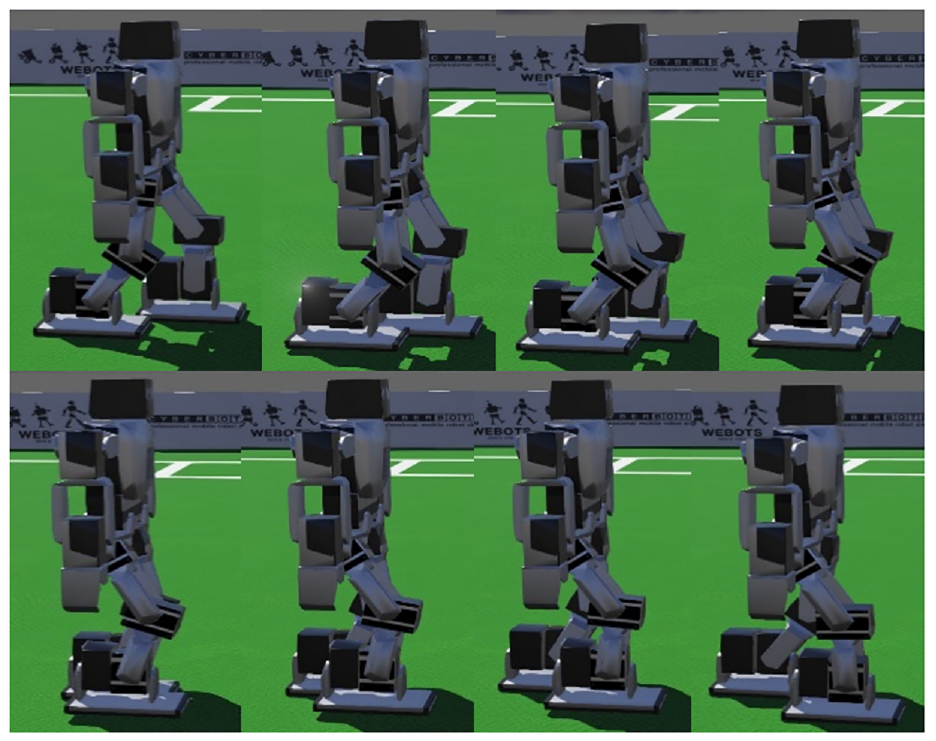
Video frames of physical robot walking.
Conclusion
A biped robot is a robot system designed with reference to the structure of the human body. It is expected to replace or accompany human beings in some environments and carry out rescue in case of danger. Biped walking is one of the basic problems in biped robot research. The gait planning algorithm of a biped robot proposed in this article comprehensively considers the stability and energy efficiency of robot walking. The algorithm has universal applicability for different forms of biped robots. The following conclusions can be drawn from the theoretical analysis and experimental results:
(a) To obtain the gait with the minimum energy consumption that meets the stability requirements in the movement process of a biped robot, the concept of a limited space of robot body motion is put forward for the GPO algorithm, which establishes a mapping relationship between the descriptive parameters and robot body motion trajectory. Through sampling and inverse kinematics calculation of the range of the descriptive parameter values and seed selection based on the sample energy consumption, combined with the seed domain space, the directional gradient optimization algorithm is applied. The optimization problem of obtaining the minimum energy consumption in walking within the large space of robot body motion is solved.
(b) The length K of the parameter description has an important influence on the obtained gait parameters and energy consumption. Compared with the X and Z directions, the optimization calculation results are more sensitive to changes in the parameter length in the Y direction. For sampling of the descriptive parameters, there cannot be multiple peaks within the sampling gap. When the value space is large, a multistep gradient approximation method can be selected to accelerate the convergence process. The GPO algorithm requires many calculations in the optimization process. By using the geometric relationship of leg joints in the walking process of biped robots, an acceleration algorithm suitable for GPU parallel operation is established, which can quickly determine the optimal gait values for robot walking. With the progress of computer science, the sampling approximation method for descriptive parameters will show superior performance compared with the random optimization algorithm.
(c) For the GSYN algorithm, a gait database is established with the walking step size, gait type and AZR variables as input items and the minimum energy consumption and gait parameters as output. Given the walking distance of a biped robot, the GSYN algorithm proposes a robot walking trajectory with the minimum energy consumption as the optimization index according to the gait database. For real-time walking control of a robot, a method to modify the AZR variable in the database query according to the feedback ZMP data to adjust the gait parameters of the robot is proposed. The GSYN algorithm dynamically adjusts the gait to meet different AZRs, effectively overcomes the interference of robot modeling and walking environment errors, realizes a compromise between low energy consumption and high robustness, and better solves the energy-saving walking problem of biped robots with highly nonlinear characteristics.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Henan Province key research and development project under Grant No. 232400411069.